
Abstract
When applying finite element method to the Poisson equation on a domain in \(\mathbb {R}^3\), we replace some Lagrange nodal basis functions by bubble functions whose dual functionals are the values of the Laplacian. To compute the coefficients of these Laplacian basis functions instead of solving a large linear system, we interpolate the right hand side function in the Poisson equation. The finite element solution is then the Galerkin projection on a smaller vector space. We construct a qudratic and a cubic nonconforming interpolated finite elements, and quartic and higher degree conforming interpolated finite elements on arbitrary tetrahedral partitions. The main advantage of our method is that the number of unknowns that require solving a large system of equations on each element is reduced. We show that the interpolated Galerkin finite element method retains the optimal order of convergence. Numerical results confirming the theory are provided as well as comparisons with the standard finite elements.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Conforming finite element
- Conforming finite element
- Interpolated finite element
- Tetrahedral grid
- Poisson equation
1 Introduction
When solving partial differential equations using finite element method, the full space P k of polynomials of degree ≤ k on each element is typically used in order to achieve the optimal order of approximation. Occasionally, the P k polynomial space may be enriched by the so-called bubble functions. This is done for stability or continuity, while the order of approximation is not increased, cf. [2,3,4, 6,7,8,9,10, 15,16,17,18]. The only exception when a proper subspace of P k is used while retaining the optimal order of convergence (O(h k) in the H 1-norm) can be found in [12, 13]. In these papers, we constructed a harmonic finite element method for solving the Laplace equation (1.1),
where Ω is a bounded polygonal domain in \(\mathbb {R}^2\). In this method only harmonic polynomials are used in constructing the finite element space because the exact solution is harmonic. However, the harmonic finite element method of [12, 13] cannot be applied (directly) to the Poisson equation,
where Ω is a bounded polyhedral domain in \(\mathbb {R}^3\).
Let \(\mathcal T_h\) be a tetrahedral grid of size h on a polyhedral domain Ω in \(\mathbb {R}^3\). Let \(\partial {\mathcal K}=\cup _{K\in {\mathcal T_h }}\partial K\). When using the standard Lagrange finite elements to solve (1.2), the solution is given by
where {ϕ i, ϕ j, ϕ k} are the nodal basis functions at element-boundary, element-interior and domain boundary, respectively, c k are interpolated values on the boundary, and both u i and u j are obtained from the Galerkin projection by solving of a linear system of equations.
In [14] an interpolated Galerkin finite element method is proposed for the 2D Poisson equation. In this paper, we extend this idea to the trivariate setting. The main idea can be described as follows. We add non-harmonic polynomial basis functions to the harmonic finite element solution of [12, 13] to obtain a solution to (1.2). That is, the solution is obtained as
where both c j and c k are interpolated values (of the right hand side function f, or of the boundary condition), and only u i are obtained from the Galerkin projection. In these constructions, the linear system of Galerkin projection equations involves only the unknowns on \(\partial \mathcal K\setminus \partial \varOmega \). The number of unknowns on each element is reduced from \(\binom {k+3}{3}\) to 2k 2 + 2, i.e., from O(k 3) to O(k 2). Compared to the standard finite element, the new linear system is smaller (good for a direct solver) and has a better condition number (by numerical examples in this paper.)
This method is similar to, but different from, the standard Lagrange finite element method with static condensation. In the latter, internal degrees of freedom on each element remain unknowns and are represented by the element-boundary unknowns. For example, the Jacobi iterative solutions of condensed equations are identical to those of original equations with a proper unknown ordering (internal unknowns first). That is, the static condensation is a method for solving linear systems of equations arising from the high order finite element discretization, which does not define a different system. In the new method the coefficients of some degrees of freedom are no longer unknowns but given directly by the data. For ease of analysis we use a local integral of the right hand side function f to determine these coefficients. We can simply use the pointwise values of f instead. The new method is like the standard Lagrange finite element method when some “boundary values” are given on every element.
The paper is organized as follows. In Sects. 2 and 3, for arbitrary tetrahedral partitions, we construct a P 2 and a P 3 nonconforming interpolated Galerkin finite elements with one internal Laplacian basis function for each tetrahedron. In Sect. 4, for arbitrary tetrahedral partitions, we construct quartic and higher degree conforming interpolated Galerkin finite elements with \(\binom {k-1}{3}\) internal Laplacian basis functions for each tetrahedron. In Sect. 5, we show that the interpolated Galerkin finite element solution converges at the optimal order. In Sect. 6, numerical tests are provided to compare the interpolated Galerkin finite elements (P 2 to P 6) with the standard ones.
2 The P 2 Nonconforming Interpolated Galerkin Finite Element
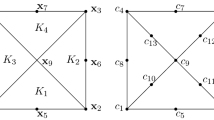
Let \(\mathcal T_h\) be a quasi-uniform tetrahedral grid of size h on a polyhedral domain Ω in \(\mathbb {R}^3\). On all interior tetrahedra, a P 2 nonconforming finite element function must have continuous moments of degree one. Let K := [x 1, x 2, x 3, x 4] be a tetrahedron in \(\mathcal T_h\) with vertices v i, and let (λ 1, λ 2, λ 3, λ 4) be the barycentric coordinates associated with K. That is, λ i is a linear function on K assuming value 1 at x i, and vanishing on the face F i opposite vertex x i. From [1, 5], we know that there is only one nonconforming quadratic bubble function per K:
where the constant c 0 is determined by (2.2) below, satisfying three vanishing 1-moment conditions on every face F i of K, and one 0-moment of Laplacian condition on K:
For a P 2 element on K, there are ten domain points located at the vertices and mid-edges of K. Let \(\{\psi _i \}_{i=1}^{10}\) be the Lagrange basis functions of a conforming P 2 element on K, i.e., each ψ i assumes value 1 at one domain point and vanishes at the remaining nine. We define the interpolated Galerkin finite element basis as follows:
We define the P 2 nonconforming interpolated Galerkin finite element space by
The interpolated Galerkin finite element solution for the Poisson equation (1.2) is defined by
such that
where ∇h denotes a picewise defined gradient, and the dependency of ϕ i on K is omitted for brevity of notation.
3 The P 3 Nonconforming Interpolated Galerkin Finite Element
Let K be a tetrahedron with the associated barycentric coordinates (λ 1, λ 2, λ 3, λ 4), as defined in Sect. 2. Then there is precisely one nonconforming cubic bubble function on K,
satisfying vanishing 1-moment conditions on every face F i of K, and one 0-moment of Laplacian condition on K:
For cubic finite elements, there are twenty domain points in each K, and twenty Lagrange basis functions \(\{\psi _i \}_{i=1}^{20} \). We define the interpolated Galerkin finite element basis as follows
The P 3 nonconforming interpolated Galerkin finite element space is defined by
The P 3 interpolated Galerkin finite element solution for the Poisson equation (1.2) is defined by
such that
4 The P k, k ≥ 4, Conforming Interpolated Galerkin Finite Element
Let K be a tetrahedron with the associated barycentric coordinates (λ 1, λ 2, λ 3, λ 4), as defined in Sect. 2. For k ≥ 4, there are \(\binom {k-1}{3}\) domain points strictly interior to K. We shall refer to them as internal degrees of freedom. In this section, we define a P k interpolated Galerkin conforming finite element on general tetrahedral grids, where the internal degrees of freedom are determined by interpolating the values of the function f on the right hand side of (1.2).
We first deal with \(\binom {k+3}{3}-\binom {k-1}{3}=2k^2+2\) domain points on the boundary of K:
The first (2k 2 + 2) linear functionals \(F_l:=u(\xi _l),~\xi _l\in \mathcal D\), l = 1, …, 2k 2 + 2, (the dual basis of the finite element basis) are nodal values at these face Lagrange nodes. The remaining \(\binom {k-1}{3}\) linear functionals are the weighted Laplacian (k − 4)-moments corresponding to the strictly interior domain points. Let \(\mathcal B\) be a basis for P k−4, and let
Lemma 1
The set of linear functionals in (4.1) and (4.2) uniquely determines a polynomial of degree ≤ k.
Proof
We have a square linear system of equations. Thus, we only need to show the uniqueness of the solution. Let u h have zero values for all these linear functionals. Therefore, u h is identically zero on the boundary of K. Then
Letting p = u 4 in (4.2), we obtain
and, consequently, ∇u h = 0 on K. Thus, u h is a constant on K. As u h = 0 on ∂K, u h = 0.
Let \(\{\phi _i\}_{i=1}^{\text{dim}~P_k}\) be the basis of P k dual to the set of linear functions defined by (4.1) and (4.2). In particular, the first 2k 2 + 2 functions ϕ i are dual to (4.1), and the remaining ones are dual to (4.2) Then, the P k (k ≥ 4) interpolated Galerkin finite element space is defined as follows:
where each ϕ i and ϕ j depend on K. The interpolated Galerkin finite element solution for the Poisson equation (1.2) is defined by
such that
5 Convergence Theory
We prove convergence for conforming and nonconforming interpolated Galerkin finite elements separately. The conforming case is considered first.
Theorem 1
Let u and u h be the exact solution of (1.2) and the finite element solution of (4.5), respectively. Then
where ∥⋅∥i is the standard Sobolev H i(Ω) norm
Proof
Testing (1.2) by \(v_h=\sum _{K\in \mathcal T_h} \sum _{i=1}^{2k^2+2} v_i \phi _i \in H^1_0(\varOmega )\), we have
On one element K, testing (1.2) by \(v_h=\phi _j\in H^1_0(K)\) for j > 2k 2 + 2, using (4.2) we obtain
Combining (5.3) and (5.4) implies
where I h is the interpolation operator to V h. The following inequalities complete the proof:
Next we consider the two nonconforming cases.
Theorem 2
Let u and u h be the exact solution of (1.2) and either the finite element solution of (2.5) or of (3.4), respectively. Then
where \(|\cdot |{ }_{1,h}^2=(\nabla _h \cdot , \nabla _h \cdot )\) , k = 2 and 3 for (2.5) and (3.4), respectively, and ∥⋅∥k+1 is the standard Sobolev H k+1(Ω) norm.
Proof
We shall prove the case of k = 2. The proof of the cubic case is similar. Let \(\tilde u_h=\sum _{K\in \mathcal T_h} \Big ( \sum _{i=1}^{10 } \tilde u_i\phi _i + \tilde u_0 \phi _0 \Big )\in V_h\) be the Galerkin finite element solution, i.e.,
Testing (5.6) by v h = ϕ 0 on some \(K\in \mathcal T_h\), we get
where in the integration by parts, we use the fact \(\nabla \tilde u_h \cdot \b n\) is a polynomial of a smaller (in fact, one less) degree on the boundary of K. That is, \(u_h=\tilde u_h\), i.e., u h satisfies (5.6).
Let w h ∈ V h. Then
The first term is the bounded by the interpolation error, i.e., the right hand side of (5.5). We estimate the second term. Let [v h] denote the jump on an (internal) triangle e of \(\mathcal T_h\), after choosing an orientation for e. Then
where Π e is the L 2 projection onto the space of bivariate linear polynomials P 1(e). By the trace inequality, we continue above estimation,
where I h is the standard interpolation operator to V h, see [11], and E h v h ∈ P k(K) is a stable extension of (moments of) Π e v h inside K. The proof is complete.
6 Numerical Tests
Let the domain of the boundary value problem (1.2) be Ω = [0, 1]3, and let \(f(x)=3\pi ^2\sin \pi x \sin \pi y\sin \pi z\). The exact solution is \(u(x,y)=\sin \pi x \sin \pi y\sin \pi z\). In all numerical tests on P k interpolated Galerkin finite element methods in this section, we choose a family of uniform grids shown in Fig. 1.

The first three levels of grids
We solve problem (1.2) first by the P 2 interpolated Galerkin conforming finite element method defined in (2.3), and by the P 2 nonconforming finite element method, on same grids. The errors and the orders of convergence are listed in Table 1. We have one order of superconvergence for the interpolated Galerkin finite element method (2.5), in both H 1 semi-norm and L 2 norm. We note that the standard P 2 conforming finite element method has one order of superconvergence in both H 1 semi-norm and L 2 norm. But the nonconforming P 2 element has the optimal order of convergence only.
Next we solve the same problem by the interpolated Galerkin P 3 finite element method (3.4) and by the P 3 nonconforming finite element method. The errors and the orders of convergence are listed in Table 2. Both methods converge in the optimal order.
Finally, we solve the problem by the interpolated Galerkin P 4, P 5, and P 6 finite element methods, (4.3) with k = 4, 5, 6, and by the P 4, P 5, and P 6 conforming finite element methods. The errors and the orders of convergence are listed in Tables 3, 4, and 5. The optimal order of convergence is achieved in every case. Also in the table, we list the number of unknowns, the number of conjugate iterations used in solving the resulting linear system of equations, and the computing time, on the last level computation. The number of unknowns for the P 6 element is only about 2/3 of that of the P 6 Lagrange element. The number of iterations for the P 6 interpolated element is less than 1/16 of that of the Lagrange element. The conditioning of the system of the new element is much better while giving also a slightly better solution. For the P 6 elements, the new method uses less than 1/10 of the computer time than that of the standard finite element.
References
Alfeld, P., Sorokina T.: Linear differential operators on bivariate spline spaces and spline vector fields. BIT Numer. Math. 56(1), 15–32 (2016)
Arnold, D.N., Boffi, D., Falk, R.S.: Approximation by quadrilateral finite elements. Math. Comput. 71(239), 909–922 (2002)
Brenner, S.C., Scott, L.R.: The mathematical theory of finite element methods. In: Texts in Applied Mathematics, vol. 15. Springer, New York (2008)
Falk, R.S., Gatto P., Monk, P.: Hexahedral H(div) and H(curl) finite elements. ESAIM Math. Model. Numer. Anal. 45(1), 115–143 (2011)
Fortin, M.: A three-dimensional quadratic nonconforming element. Numer. Math. 46, 269–279 (1985)
Hu, J., Huang Y., Zhang S.: The lowest order differentiable finite element on rectangular grids. SIAM Numer. Anal. 49(4), 1350–1368 (2011)
Hu, J., Zhang, S.: The minimal conforming H k finite element spaces on R n rectangular grids. Math. Comput. 84(292), 563–579 (2015)
Hu, J., Zhang, S.: Finite element approximations of symmetric tensors on simplicial grids in R n: the lower order case. Math. Models Methods Appl. Sci. 26(9), 1649–1669 (2016)
Huang, Y., Zhang, S.: Supercloseness of the divergence-free finite element solutions on rectangular grids. Commun. Math. Stat. 1(2), 143–162 (2013)
Schumaker, L.L., Sorokina, T., Worsey, A.J.: A C1 quadratic trivariate macro-element space defined over arbitrary tetrahedral partitions. J. Approx. Theory 158(1), 126–142 (2009)
Scott, L.R., Zhang, S.: Finite element interpolation of nonsmooth functions satisfying boundary conditions. Math. Comput. 54, 483–493 (1990)
Sorokina, T., Zhang, S.: Conforming harmonic finite elements on the Hsieh-Clough-Tocher split of a triangle. Int. J. Numer. Anal. Model. 17(1), 54–67 (2020)
Sorokina, T., Zhang, S.: Conforming and nonconforming harmonic finite elements. Appl. Anal. https://doi.org/10.1080/00036811.2018.1504031
Sorokina, T., Zhang, S.: An interpolated Galerkin finite element method for the Poisson equation (preprint)
Zhang, S.: A C1-P2 finite element without nodal basis. Math. Model. Numer. Anal. 42, 175–192 (2008)
Zhang, S.: A family of 3D continuously differentiable finite elements on tetrahedral grids. Appl. Numer. Math. 59(1), 219–233 (2009)
Zhang, S.: A family of differentiable finite elements on simplicial grids in four space dimensions (Chinese). Math. Numer. Sin. 38(3), 309–324 (2016)
Zhang, S.: A P4 bubble enriched P3 divergence-free finite element on triangular grids. Comput. Math. Appl. 74(11), 2710–2722 (2017)
Acknowledgement
The first author is partially supported by a grant from the Simons Foundation #235411 to Tatyana Sorokina.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Sorokina, T., Zhang, S. (2021). Trivariate Interpolated Galerkin Finite Elements for the Poisson Equation. In: Fasshauer, G.E., Neamtu, M., Schumaker, L.L. (eds) Approximation Theory XVI. AT 2019. Springer Proceedings in Mathematics & Statistics, vol 336. Springer, Cham. https://doi.org/10.1007/978-3-030-57464-2_13
Download citation
DOI: https://doi.org/10.1007/978-3-030-57464-2_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-57463-5
Online ISBN: 978-3-030-57464-2
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)