
Abstract
Wide Area Measurement Systems (WAMS) is a collective technology to monitor power system dynamics in real time, identify system stability related weakness and helps to design and implement counter measures. It uses a global positioning system(GPS) satellite signal to time synchronize from phasor measurement units (PMUs) at important nodes in the power system, sends real-time phasor (angle and magnitude) data to a Control Centre. The acquired phasor data provide dynamic information on power systems, which help operators to initiate corrective actions to enhance the power system reliability. The goals of WAMS are real time monitoring, post disturbance analysis, adaptive protection and power system restoration. The major components of WAMS are Phasor Measurement Unit (PMU), Phasor Data Concentrator (PDC), Global Positioning System (GPS for Time Synchronization of the phasors), Communication channel (Preferably optical fiber cable), Visualization and analysis tools, Wide area situational awareness system and Wide area protection and control. This chapter is going to discuss about the goals and benefits of using PMUs, comparison between PMUs and SCADA system, Detailed description of WAMS components, synchronized PMUS, different kind of applications of WAMS in power sector, Components and operation of PMUS, real time examples of WAMS in power system operation and control.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The objectives of the power sector are good quality, high stability and cheap. In conventional power system, there are lot of possibilities to switch to instability mode. It’s mainly due to the occurrence faults and the outages [1]. The stability of the conventional power system is improved by means of interconnection. Hence the modern power system interconnects the regional electric networks such as interconnection of Europe networks (UCTE) [2, 3], the japan power grid to improve the stability of the power system [4, 5]. Interconnected power system effectively utilize the distributed resources from different locations and accomplish the optimal scheduling of energy sources. In addition to this, it provides support during fault conditions which improves the reliability of the whole power system [6]. But low frequency oscillations (LFOs) are excited quickly when the faults or disturbance exists in the interconnected systems. There is no predefined characteristics for these oscillations in each system.
2 Stability Problems of Interconnected Systems
The conventional power systems are interconnected to optimize the generation of distributed energy sources from different areas, to augment the global optimal scheduling for power utilization, also to elevate the power economic dispatch. Apart from this, it provides the mutual power support from one area to another area which improves reliable and security of large scale power systems. But the developments happened in the grid structure and operating mode of interconnected systems creates stability problems due to its complexity. The stability of power system can be classified into three classifications as mentioned by IEEE guide [7], namely rotor angle stability, frequency stability and voltage stability as shown in Fig. 1. The ability of the power system to sustain steady frequency followed by a severe system upset due to the imbalance between generation and load is known as frequency stability. It is determined by the ability to restore the equilibrium between the generation and load without much affecting the load. The constant frequency swings leading to the instability of the system by tripping of generating units and loads. Voltage stability refers the ability of the power system to maintain the constant voltage at all buses even after it is subjected to a disturbance. It is influenced by the ability to maintain the equilibrium between the demand and the supply.

Classification of power system stability
The continuous voltage fall or raise in buses will lead to instability of the system. The ability of the synchronous machines of an interconnected power system to maintain in synchronism after it is subjected to a disturbance is called as rotor angle stability. It is governed by the capability of maintaining equilibrium between electromagnetic torque and mechanical torque of synchronous machine in the system. When there is an increase in the angular swings of few generators will lead to the loss of synchronism with other generators, it leads to the instability of the system [8]. The rotor angle stability is reduced by means of proper damping arrangements. In case of insufficient damping, these oscillations will start to spread to the transmission facilities and to the tie lines also. The frequency of power oscillations in the interconnected systems lies between 0.2 and 3 Hz and it is called as low frequency oscillations (LFO) [9]. It may be represented as fast dynamics with the duration of a few seconds in the absence of effective oscillation damping control.
In interconnected systems, LFO is an existing rotor angle stability problem. In case of IAO, the oscillation frequency lies between 0.2 and 0.8 Hz and it leads to the threatening to the reliability operation, reduction in the transmission power capacity and limiting the ability of interconnection between large electric networks. The voltage swings may also be created by the undamped oscillations in some buses and also leads to the frequency stability.
3 WAMS Technology
The concept of wide area measurement has been introduced by Bonneville Power Administration in the late 1980s. WAMS has made up of advanced measurement technology, information tools and operational infrastructure to manage the complexity in the behavior of large power system. It can be used as standalone infrastructure or as a complementary system. The first one will replace the function of conventional SCADA system and the later one designed to improve the operator’s real time situational awareness to improve the performance of the grid operation. WAMS is the combination of synchronized phasor measurement unit, communication engineering and information technology in electric power systems. The objective of WAMS is to realize dynamic monitoring, analysis and control for the stability and the efficient operation of the global power system. WAMS is mainly applied in the two fields namely, smart grid construction and stability analysis and control based on wide area measurements. The major components of WAMS are
-
Phasor Measurement Units (PMUs) placed at different areas for measuring local variables like voltage and current
-
A monitoring and control system located in the power system dispatch center
-
A digital communication network for information exchange
The application of WAMS in the power system, used to implement online monitoring of remote operating variables. These variables are used to disclose the dynamic behavior of the power systems for energy management and decision making of transmission system operators (TSOs). The concept of wide area measurement has been introduced by Bonneville Power Administration in the late 1980s. WAMS has made up of advanced measurement technology, information tools and operational infrastructure to manage the complexity in the behavior of large power system. It can be used as standalone infrastructure or as a complementary system. The first one will replace the function of conventional SCADA system and the later one designed to improve the operator’s real time situational awareness to improve the performance of the grid operation. There are three sub processes which are interconnected in the WAMS, namely, data acquisition, data transmission and data processing. Each process is performed by measurement systems, communication systems and energy management systems respectively [10, 11]. It accumulates the data from the conventional or advanced measurement devices and transmit it through proper communication systems to the control centers. The WAMS elementary process is shown in Fig. 2.

WAMs elementary process
3.1 Data Resources
The data resources are classified into two categories based on its nature such as operational data and non-operational data. The data which is transmitted by the installed device continuously to the control centers such as voltage, current and breaker status. If the data is transmitted once in a while during the events then it is called as nonoperational data like faults, lightning strokes and power fluctuations etc., The data resource in the power system can be classified into operational and non-operational similar to WAMs. The operational data includes supervisory control and data acquisition, synchronized phasor measurement system. Circuit breaker monitor, digital fault recorder and digital protective relays are coming under non-operational data resources [12].
3.1.1 Supervisory Control and Data Acquisition (SCADA)
SCADA is used to collect and process the data over a long distance through the application of operational controls and it is completely assisted by the computer. There are three major functions are executed by SCADA viz, data acquisition, supervisory control and alarm display and control. These functions are carried out by the hardware devices namely, Master terminal unit (MTU), remote terminal unit (RTU) and communication channel. MTU is located in the control centers, whereas RTU is located in the remote field site and it may be programmable logic controllers (PLC) or intelligent electronic devices (IED) and the communication channel connecting both remote site and the control center.
MTU acts as the heart of the SCADA system and installed at the control centers. The major roles played by MTU are,
-
Manage all communications
-
Gathers data of RTU
-
Stores obtained data and information
-
Send information to other systems
-
Commands the actuators connected with the RTU and
-
Interfaces with operators.
RTU is used for monitors and controls the equipment through the data acquisition and control at the remote sites and send the collected data to MTU. It may be microprocessor based devices and can be used as a relay. The size of RTU is named as small, medium and large, based on the number of analog/digital inputs. PLC can be used to realize the operations of electrical equipment such as relays, drum switches and mechanical timer/counters at the remote sites. PLC is a small computer which is suitable for industries because it is more economical, versatile, flexible and compact than RTU. The communication system provides the channel between the master station and the remote sites through fiber optic or wireless or satellite. SCADA employ the physical communication architectures such as point to point, multi point and relay station architecture. The structure of SCADA architecture is shown in Fig. 3.

Structure of SCADA architecture
3.1.2 Synchronized Phasor Measurement System (SPMS)
SPMS is an advanced device employs sample clock of common time source like GPS and is used to measure currents, voltage and angle between them. Apart from these, it can be customized to measure the parameters like local frequency, rates of frequency changes, harmonics measurements, negative and zero sequence quantities [13]. Phasor measurement unit (PMU), phasor data concentrator (PDC) and communication system are the three main parts of SPMS. PMU is used to collect the electrical signals like voltage and current at the rate of 48 samples per cycle. PMU is a kind of microprocessor based device. The output of PMU is a time-tagged phasors also called as synchro phasor. Synchro phasor is transmitted to the local or remote receiver at the rate of 60 samples per second. PMU plays the role of RTU in a SCADA system.
PDC plays a very significant role in SPMS. It collects the synchro phasors from several PMU or PDC and fed out them as a single stream of data after several checks on data consistency. Rejection of bad data, aligning the time stamps and creating the coherent record of continuous recorded data. There are two major distinguish between the SCADA and WAMs in case of streamed data. Synchro phasor data is continuous and streaming in nature whenever it transmits the data to the master station either in specified time intervals or required by master station and synchro phasor data has more sensible than the data provided by RTU which requires high bandwidth, low latency communication systems. The structure of SPMS is shown in Fig. 4.

Structure of synchronized phasor measurement system
3.1.3 Digital Fault Recorder
Digital fault recorder is used to record the waveforms accurately during fault conditions. It collects huge amount of data such as analog or status data in the different stages of faults like pre fault, fault and post fault conditions [14]. Maximum current, fault sequence, type of faults and the circuit breaker operation sequence are some examples of data collected. These collected data are sampled at the very high rate of 64 to 356 samples per cycle and it cannot be used in real time applications, hence it is stored as samples for offline processing. The above said task is achieved by using SPMS directly. The software module for digital fault recorder is shown in Fig. 5 [15].

Digital fault recorder software modules
3.1.4 Digital Protective Relay
The most important thing in power system is to isolate the faulty area from the healthy one to minimize the impact. This kind of functions are taken care by protective relays, these are controlled by digital signal recently and are known as digital protective relays (DPRs). It is a microprocessor based device and is capable of detecting faults by means of current and voltage waveforms. It is also enabled to measure and record analog and status data which is communicated to the centralized location. The sampling rates of DPR is quite low and varies from 64 to 128 samples per cycle. Obviously this sampling rate reports lower accuracy of DPR data compared with the other data resources. The digital fault relay software module is shown in Fig. 6 [15].

Software module of digital fault relay
3.1.5 Circuit Breaker Monitor (CBM)
CBM is an electronic device used to monitor the status of circuit breakers. It is designed in such a way that it works in real time and capturing information about each breaker for its proper operation either by manually or automatically. The Circuit Breaker Monitor Analysis Software Module is shown in Fig. 7 [15].

Circuit breaker monitor analysis software modules
3.2 WAMS Communication Systems
Communication system perform a vital role in power system operation and control because it enhances the security of the system. Ensuring the data delivery both from data resources to the control centers and from the control center to the system actuators are the two major task performed by the communication system in WAMS. A new developing model in communication system is open system interconnection (OSI) layer. It deals about the comprehensive architecture for explanation, designing, implementation, standardization and use of communication networks. There are seven layers are present in the OSI reference model namely physical, data link, network, transport, session, presentation and application layer as shown in Fig. 8. It also emphasis the link between the OSI layers and data resources, applications and communication systems.

Layers in WAMS based OSI reference model
The performance of WAMS communication systems are based on the characteristics of the transmission media such as the cost, bandwidth, propagation delay, security and reliability. Transmission data can be classified into two kinds such as guided and unguided [16]. If the information is transferred through a solid medium such as optical fiber, twisted cable pair, coaxial cable and power transmission lines then it is known as guided transmission media. The transmission of information is done by electromagnetic waves like atmosphere and outer space then it is called as unguided transmission media. The comparison between the characteristics of most common media used in WAMS both in guided and unguided media is listed in Tables 1 and 2 [17].
3.3 WAMS Applications
The software based tools which are used to process the raw data from data resources to extract the useful information for the power system operators are called as WAMS Applications. In general, the WAMS applications are specific as generation, transmission and distribution. In case of generation applications, it is used to control the generator operation in real time and also monitoring the stability condition of the generators. The group of computer aided tools which is used to control and monitor transmission and sub transmission system is called as EMS. State estimation, load flow, optimal power flow, load forecast and economical dispatch are the few conventional EMS applications. Apart from this, the application of WAMS is extended to
-
Integrated phasor data platform
-
Wide area dynamic monitoring and analysis
-
Power stability prediction and alarming
-
Fault analysis support
-
Comprehensive system load monitoring
-
Power system restoration support tool.
In distribution side, systems that enable a distribution company to monitor, coordinate and operate distribution components from the remote area in real time. It is termed as automation applications as per IEEE community. The major objective of this idea is to reduce the cost, enhance the service availability and better services to the customers. It is again sub divided into substation automation, feeder automation and consumer side automation.
WAMS applications also categorized further into two kinds in general. The application of WAMS in measurement of quantities on only their own, area, region or specific TSO becomes the first category. WAMS is used to measure the quantities from neighboring national WAMS becomes the second kind. All these applications may use online or off line to collect the information about the power system.
4 Phasor Measurement Units (PMUs)
4.1 Historical Development of PMUs
Power system engineers are interested to find the phase angles of voltage phasors of power network buses because the real power flow in the power line is proportional to the sine of the angle between voltages at the two terminals of the line. The real power and the phasor angle between the voltages are the two parameters which takes major role in power system planning and operation. The use of modern application in the measurement of phase angle difference [18, 19]. They have used LORAN-C, GOES satellite transmissions and the HBG radio transmissions to obtain synchronization of reference time at different locations in power system. In general, the immediate next positive going zero crossing of a phase voltage was used to determine the local phase angle with respect to the time reference. By finding the difference between the measured phase angles of voltages on a common reference at two locations was determined. The accuracy of the measured values were achieved in the order of 40 μs. These measurement techniques are not suitable for the implementation of wide area measurement system in power system.
The origin of present era of phasor measurement technology has started when the research on computer relaying of transmission lines has started. Before these works, the above said research was conducted by microprocessor and its capacity was not sufficient to carry out the calculations. In early days, the fault in the transmission lines were identified by solving six fault loop equations at each instant. The research was carried out to eliminate the solving of six loop equations for finding the fault and derived a new technique based on symmetrical component analysis of line voltages and currents. In the above said method, it is possible to identify the types of fault and all types of fault calculation from the single equation. A new symmetrical component based algorithm for finding symmetrical components of three phase voltage and currents [20]. This paper played a vital role in defining the algorithm and methods to calculate symmetrical components and positive sequence voltages and currents. Later the research was recognized that the measurement of positive sequence components in power system is of great value and it is the fundamental importance. The importance of positive sequence voltages and currents and its uses and it acts as starting point of synchronized phasor measurement technology [21].
The Global Positioning system (GPS) has been used to synchronize power system measurements over a long distance. The first prototype model of PMU using GPS was built by Virginia Tech in the year 1980 and the prototype has shown in Fig. 9. The first commercial product of PMU was started by Macrodyne in association with Virginia Tech [22]. Nowadays there are lot of manufacturer producing PMUs worldwide. IEEE recommended the standards for format of data files created and transmitted by PMUs in the year 1991 and also the same was reviewed in the year 2005 [23, 24]. There are lot of research works are carried in the worldwide regarding the applications of PMUs.

The first phasor measurement units (PMUs) built at the Power Systems Research Laboratory at Virginia Tech [13]
4.2 Introduction
The PMU historical development has been discussed in Sect. 4.1 in detail. This section aims to cover the aspects of the PMUs regarding its architecture and management system in practical implementation. The measurements made by PMUs are timestamped at the source and there is no issues of transmission speed. The PMU measurements are used to identify the state of the power system at each instant because of its time stamp. The data from PMUs will reach the central location based on the delay in the communication channel used. But the time tags associated with each measurement will help the operators to get the clear picture of the power system operation. This section address about the GPS method suitable for PMU measurements, PDCs, Communication systems and the file structures for PMUS to ensure the interoperability of the power system.
4.3 Block Diagram of PMU
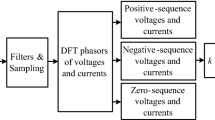
The basic block diagram of PMU based on the first module developed by Virginia Tech is shown in Fig. 10. The basic difference between the first model and the new ones are the symmetrical component relays are replaced by computer relays. The analog inputs like voltages and currents are obtained from the secondary of the potential and current transformers respectively. In general, three phase voltages and currents are measured so that it is easy to determine the positive sequence measurements. PMU collects the currents from the several feeders and voltages of the various buses in the substation. The measured values of currents and voltages are converted into voltages usually in the range of ±10 V so as to match with the requirement of the analog to digital converters. The frequency response of the anti-aliasing filters are decided by the sampling rate chosen. The cut-off frequency of analog filters always chosen less than the sampling frequency to satisfy the Nyquist criterion. In relay design process, the sampling rate is chosen high than its high cut off frequency of the analog anti-aliasing filters. This stage is followed by a digital decimation filter. It converts the sampled data to a lower sampling rate and this combination provides the concatenation of digital anti aliasing filter with the analog anti-aliasing filters. This will enhance the stable operation of the filters under aging and temperature variation conditions. This guarantees that all analog signals have the same phase shift and attenuation, hence the phase angle differences and relative magnitudes of the different signals are unchanged. If the raw data from samples of analog signal are stored, then it will be very much useful as high bandwidth digital fault recorders. It is an added advantage of using oversampling technique.

Block diagram of PMU
The sampling clock is synchronized with the GPS clock pulse through phase locked loop. The sampling rates are started with 12 samples per cycle of the nominal frequency in the early days and it has improved to 96 or 128 samples per cycle due to faster analog to digital converters and processors in the modern PMUs. The sampling rate will improve in the future so as to improve the estimation accuracy further [13]. The positive sequence estimates are calculated by microprocessors for all currents and voltages using the frequency detection techniques. The other techniques are determination of frequency and rate of change of frequency measured locally and included in the output of PMU. Then the time stamp signal is formed from the two of the signals derived from the GPS receiver and it will help to identify the universal time coordinated (UTC) second and the instant defining the boundary of the power frequency as prescribed by IEEE standard. The output of PMU will be time stamped and it is transferred to the suitable modems in proper file structure through proper communication channels.
4.4 Global Positioning System (GPS)
In the year 1978, US department of defense originated the GPS by using the launch of first Block I satellites. There were 24 modern satellites was put in place in the year 1994. These are arranged in six orbital planes displaced from each other by 60° and inclined about 55° with respect to equatorial plane as shown in Fig. 11. The orbital radius of the satellites are 16,500 miles and they go around the earth twice per day. It is arranged in such a way that at least six satellites has to be visible from the earth at a time but there are 10 satellites are visible as of now. The major function of the GPS is to find out the coordinates of the receiver and finding the time of pulse per second in PMUs. The pulse received from the receiver will coincide with all other received pulses in the earth within 1 microsecond. Nowadays the synchronization is achieved within few hundred nano seconds.

GPS satellite disposition
The accurate clocks available in the GPS will provide one pulse per second signal. The time they use is known as GPS time and it will not account the earth’s rotation. The corrections in the received signal is done at the receivers to provide UTC clock time. PMU standard uses UNIX time base with a second of century (SOC) counter which began to count at midnight on January 1, 1970. Nowadays there are lot of GPS systems are deployed by other nations also for the same objective. GPS system will play a major role in the synchronization for PMUs in the future also.
4.5 Hierarchy for Phasor Measurement Systems
In power system, the PMUs are installed in the substations and it depends on the provisions made for measurements in that location. The measured phasor data is used in the remote locations from the PMUs. Hence there should be some predefined architecture has to be followed to realize the full benefit of the PMU measurement system. The most commonly used architecture of the PMU measurement system is shown in Fig. 12. PMUs are used to measure time stamped positive sequence voltages, currents, frequency and rate of change of frequency of all buses and feeders in the substation. The measured data are stored in the local storage devices and can be retrieved from remote locations for diagnostic purpose. The storage capacity of the local storage is always limited and the data belongs to important events needs to be stored in the permanent storage to avoid overwritten. The measured phasor data will be immediately available for real time applications either in locally or higher level operations.

Hierarchy of Phasor Measurement System
In the hierarchy of PMUs measurement, the next device is Phasor Data Concentrator (PDCs). The major function of the PDCs is to collect data from many PMUs, discard bad data, line up the time stamps and make a record of data from wider part of power system. The local storage facilities are also available in the PDCs along with the application functions which made PDCs exists for the real time applications. In the next level of hierarchy, the device available is called as super data concentrator as shown in Fig. 12. Its function is also similar to PDCs but in large scale for the entire power system. From the Fig. 12, it is clear that the communication between each level should be bidirectional. In most of the cases, the data flow required is only upward except few instants. There is a standard format available for upward and downstream communications among the hierarchy.
4.6 Functional Requirements of PMUs and PDCs
4.6.1 Synchro Phasor Evolution
PMUs are manufactured by different manufacturers in the various parts of the World. But it should be ensured that the interoperability among PMUs of different manufacturers should perform a common standard. The standard for synchro phasor is first developed by IEEE in the year 1995 [23]. The early models of PMUs were tested for interoperability based on this standard and it was found that the performance is not identical at off—nominal frequencies [25]. Hence it was realized that the existing standard was not enough to define the performance of PMUs at off-nominal frequencies. It was resolved by IEEE team in the year 2005.
The phasor of a single is independent of the signal frequency. If any pure sinusoid with any frequency is applied at the input of PMU then it is represented as a phasor of magnitude equal to its rms value of the signal and its phase angle (θ), which is the angle between the reporting instant and the peak of the sinusoid as shown in Fig. 13. There are many filters are employed at the input of the PMUs and the phase delays produced by these should be compensated before it estimates the phasor. The positive sequence produced by the PMU must be correct at all frequencies irrespective of the balanced or unbalanced input signal. PMU standard provides the specification for frequency deviation of ±5 Hz from the nominal frequency. The other accuracy specifications provided by PMU standards are standardized reporting time for phasors which is phase locked to the GPs is 1 pps and is at intervals are multiples of nominal power frequency.

PMU input signal and output Phasor estimate
4.7 File Structure of ‘Synchro Phasor’ Standard
Synchro phasor file structure is similar to that of COMTRADE, which describes about the files for transient data collection and dissemination. Initially COMTRADE standard has been modified by International Electro Technical Commission (IEC) and now it has been followed by computer relays, digital fault recorders, other producers and users of power system transient data. There are four types of files are defined by synchro phasor standard for data transmission to and from PMUs. In which three files are created by PMUs and the other one is produced by PDC. Header files, Configuration files and Data files are the files created by PMUs and Command file is created by PDC. The common structure of all files are shown in Fig. 14. The two bytes of first word is for synchronization of the data transfer. The second word describes the size of the total record, data originator is identified by third word, Second of Century (SOC) and fraction of a second (FRACSEC) is delivered by the next two words. The FRACSEC data word length is specified by the configuration file. The check sum is the last word used to find any errors in data transmission.

Common structure of files transmitted from and to PMUs
Header file contains the information need to be conveyed to the user from the producer of the data and it is in human readable format. The configuration and data files are in machine readable format. The Configuration file delivers the information about the explanation of the data contained in the data file. PMU will send the Header and configuration files once the nature of data to be transmitted is defined. The data file comprises the phasor data which is the output of the PMU and it may be in rectangular or polar form. The performance of the PMUs are controlled by the Command files from the higher level hierarchy. There are several commands have been defined and are available for current usage.
4.8 Comparison between SCADA and PMUs
PMUs stands at the top while comparing with its counterparts like SCADA. There are few added advantages of PMUs compared to SCADA as described in the Table 3.
4.9 PMU scenario in Indian Power Grid
Indian power grid is one among the largest power grids in the World. The operation and monitoring of Grids in Indian power grid is carried out by National Load Dispatch Centre (NLDC), five Regional Load Dispatch Centers (RLDC) and State Load Dispatch Centers (SLDC). The entire grid has subdivided into five regions such as Northern region, Southern region, Eastern region, North East region and Western region. To enhance the advanced technologies in the power network to improve the service and reliability of the supply to the customers, Synchro Phasor measurements are deployed in the Indian Power Grid. The first pilot project on PMU was installed in Northern region in the year 2010. The said project consists of PMUs along with GPS connected at 9 selected substations in the grid. A PDC and other accessories were located at NRLDC at New Delhi as published in an article of electrical India.
The present scenario of PMUs in India as there is one PDC is installed at the NLDC and it is integrated with other five PDCs connected at the RLDC [15]. There are 60 number of PMUs are installed as of now in various regions respectively 12 PMUs in Eastern region, 8 in North –east region, 14 in Norther region, 10 in Southern region and 16 in Western region. In most of the locations, the PMUs are used to measure the voltages in 220 kV and 400 kV buses. There are other pilot projects are also carried out throughout the grid to enhance the power system reliability and security.
4.10 Applications of PMU in Power System
The implementation of PMUs in the power system and collecting the magnitude and phase angle of voltages and currents of various buses in the substation will help us to undergo the following applications,
-
Post disturbance analysis
-
Stability monitoring
-
Thermal overload monitoring
-
Power system restoration
-
State estimation
-
Real time control
-
Adaptive protection
4.11 Challenges in PMU implementation
Wide area measurement and controlling leads for robust control of power system from remote area and also it enhances the power system stability and reliability. There are lot of benefits behind the invention of new technologies as well as the challenges are also existing everywhere. The challenges in the implementation of PMUs in the power system are as follows,
-
Selecting suitable location for PMU placement
-
Integration of synchro phasor technology with SCADA
-
Communication delays
-
Low frequency oscillation monitoring
-
Distorted power system waveforms make prediction difficult
-
High computational requirement
-
Developing tools for in depth post facto analysis.
5 Challenges of Wide Area Dynamic Monitoring and Control
There are many theoretical research works are still going on regarding WAMS and it should be carried forward to the practical application of wide area stability control in the large interconnected system. The challenges available in front of the researchers are summarized as below,
-
Problem of interconnection between local controllers and wide area controllers: Large interconnected power systems in practice employs lot of conventional stability control devices such as PSS devices. PSS devices are using lot of local controllers and these are designed to damp the local oscillation modes. If the wide area damping control is employed in power system then it may reduce the damping capability of local controllers. Hence, it is important to maintain the overall stability of the power system by simultaneously optimizing the local and wide are controllers. The new techniques are proposed to tune large number of local PSSs as but only few works are carried out for the tuning on both local and wide area controllers [26,27,28].
-
Problem of control coordination among multiple wide-area damping controllers: The wide area stability control employs devices such as HVDC and FACTS for power system control and control signals with multi-channel. It is the recent trends used in the smart transmission grids. There are lot of LFO modes are inbuilt in the control devices to provide multiple damping on dominant modes and improve the overall stability of the interconnected systems.
But the interaction between the different control loops may exists if the coordination designs are not taken care in multiple wide area controllers. These interactions may reduce the damping performance of multiple controllers or leads to instability of the power system. Hence it is noted that the coordination of wide area control is must for the practical application of wide area stability control.
-
Problem of how to choose optimal control-input for multiple wide-area damping controllers: The performance of the controllers depends on the selection on the feedback signal. Some methods are proposed for the selection of feedback signals for local controllers [29,30,31,32,33,34]. But in WAMS application, it is possible to select the control signals in both local and wide area range. On comparing with the local controllers there are more local and wide area signals are existing to select as a feedback control input. But the research work related to these selections are only few.
-
Problem of design and implementation for practical application of online wide area monitoring and control: Many of the research works related to wide area stability control stays only at the theoretical stage. To implement in the practical case, there are lot of problems encountered still such as design of advanced control algorithm to reduce the delay effect of wide area control, embedding the wide area control in the power system [35,36,37].
6 Conclusion
WAMS is a collective technology to monitor power system dynamics in real time, identify system stability related weakness and helps to design and implement counter measures. This chapter has described about the need for WAMS in the present scenario power grid to manage LFO and enhance the stability of the power system. It also illustrates the major components of WAMS and its operation in brief. It also emphasis on the application of WAMS in the power system generation, transmission and distribution. The most important part of WAMS is PMU devices which are located at the remote locations to measure the physical quantities. This chapter covered the importance of PMU in smart grid, its components, application and limitations in detail.
References
N. Anandan, S. Sivanesan, S. Rama, T. Bhuvaneswari, Wide area monitoring system for an electrical grid. Energy Procedia 160, 381–388 (2019)
C.D. Vournas, A. Metsiou, B.M. Nomikos, Analysis of intra-area and interarea oscillations in South-Eastern UCTE interconnection, in IEEE Power Energy Society General Meeting, 2 (2009)
J. Lehner, M. Kaufhold, M. Treuer, T. Weissbach, Monitoring of inter-area oscillations within the European interconnected network based on a wide area measuring system. in IEEE PES Transmission and Distribution Conference and Exposition (2010)
T. Hashiguchi, Y. Mitani, O. Saeki, K. Tsuji, M. Hojo, H. Ukai, Monitoring power system dynamics based on phasor measurements from demand side outlets developed in Japan Western 60 Hz system, in IEEE Power Systems Conference and Exposition, 4 (2004)
Y. Ota, T. Hashiguchi, H. Ukai, M. Sonoda, Y. Miwa, A. Takeuchi, Monitoring of interconnected power system parameters using PMU based WAMS, in IEEE Lausanne Power Tech (2007)
Y. Li, D. Yang, F. Liu, Y. Cao, C. Rehtanz, Interconnected Power Systems (Springer Press, 2016)
IEEE Power Engineering Society, IEEE Guide for Synchronous Generator Modeling Practices and Applications in Power System Stability Analyses (The Institute of Electrical and Electronics Engineers, Inc., 2003)
P. Kundur, J. Paserba, V. Ajjarapu, G. Andersson, A. Bose, C. Canizares, T. Van Cutsem, Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 19(3), 1387–1401 (2004)
G. Rogers, Power System Oscillations (Kluwer, Norwell, 2000)
D. Yan, Wide-area protection and control system with WAMS based. In: International Conference on Power System Technology (PowerCon2006), China, 22–26 October, Chongqing, China, 2006, pp. 1–5
M. Shahraeini, M.H. Javidi, Wide area measurement systems, in Advanced Topics in Measurements (InTech, 2012). https://www.intechopen.com/books/advanced-topics-in-measurements/wide-area-measurement-systems
A. Vaccaro, A.F. Zobaa, Wide area monitoring, protection and control systems: the enabler for smarter grids (The Institution of Engineering and Technology, 2016)
A.G. Phadke, J.S. Thorp, Synchronized Phasor Measurements and Their Applications (Springer, New York, USA, 2008)
M. Kezunovic, Integration of substation IED information into EMS functionality, final project report (Power Systems Engineering Research Center (PSERC), 2008)
P. Jena, Introduction to Samrt Grid, NPTEL online certification courses (IIT Roorkee, 2017) [Lecture 11 & 12]
M. Shahraeini, M.H. Javidi, M.S. Ghazizadeh, A new approachfor classification ofdata transmission media in power systems, in International Conference on Power System Technology, 24–28 October, Hangzhou, China, 2010, pp. 1–7
C. Pisani, Real time tracking of electromechanical oscillations in ENTSO-e Continental European Synchronous Area, PhD Dissertation, University of Naples, May 2014
G. Missout, P. Girard, Measurement of bus voltage angle between Montreal and Sept-Iles. IEEE Trans. PAS. 99(2), 536–539. 2 (March/April 1980)
P. Bonanomi, Phase angle measurements with synchronized clocks—Principles and applications. IEEE Trans. PAS 100(11), 5036–5043 (1981)
A.G. Phadke, T. Hlibka, M. Ibrahim, Fundamental basis for distance relaying with symmetrical components. IEEE Trans. PAS. 96(2), 635–646 (March/April 1977)
A.G. Phadke, J.S. Thorp, M.G. Adamiak, A new measurement technique for tracking voltage phasors, local system frequency, and rate of change of frequency. IEEE Trans. PAS 102(5), 1025–1038 (1983)
Macrodyne Model 1690 PMU Disturbance Recorder”, Macrodyne Inc. 4 Chelsea Place, Clifton Park, NY, 12065
IEEE Standard for Synchrophasors for Power Systems, C37.118–2005, pp 56–57, IEEE 1344–1995. Sponsored by the Power System Relaying Committee of the Power Engineering Society, pp 56–57
IEEE Standard Common Format for Transient Data Exchange (COMTRADE) for Power Systems, IEEE C37.111–1991, Sponsored by the Power System Relaying Committee of the Power Engineering Society
J. Depablos, V. Centeno, A.G. Phadke, M. Ingram, Comparative testing of synchronized phasor measurement units, in Power Engineering Society General Meeting, 2004. IEEE, vol. 1, 6–10 June 2004, pp. 948–954
A.L.B. Do Bomfim, G.N. Taranto, D.M. Falcao, Simultaneous tuning of power system damping controllers using genetic algorithms. IEEE Trans. Power Syst. 15(1), 163–169 45 (2000)
G. Missout, J. Beland, G. Bedard, Dynamic measurement of the absolute voltage angle on long transmission Lines, IEEE Trans. PAS. 100(11), 4428–4434. 3 (November 1981)
L.J. Cai, I. Erlich, Simultaneous coordinated tuning of PSS and FACTS damping controllers in large power systems. IEEE Trans. Power Syst. 20(1), 294–300 (2005)
M.M. Farsangi, Y.H. Song, K.Y. Lee, Choice of FACTS device control inputs for damping inter-area oscillations. IEEE Trans. Power Syst. 19(2), 1135–1143 50 (2004)
M.M. Farsangi, H. Nezamabadi-pour, Y.H. Song, K.Y. Lee, Placement of SVCs and selection of stabilizing signals in power systems. IEEE Trans. Power Syst. 22(3), 1061–1071 (2007)
H.H. Alhelou, M.H. Golshan, J. Askari-Marnani, Robust sensor fault detection and isolation scheme for interconnected smart power systems in presence of RER and EVs using unknown input observer. Int. J. Electr. Power Energy Syst. 1(99), 682–694 (2018). (Jul)
H.H. Alhelou, M.E. Hamedani-Golshan, R. Zamani, E. Heydarian-Forushani, P. Siano, Challenges and opportunities of load frequency control in conventional, modern and future smart power systems: A comprehensive review. Energies 11(10), 2497 (2018). (Oct)
H. Haes Alhelou, M.E. Hamedani Golshan, F.M. Hajiakbari, Wind driven optimization algorithm application to load frequency control in interconnected power systems considering GRC and GDB nonlinearities. Electric Power Compon. Syst. 46(11–12), 1223–1238 (2018). (Jul 21)
H. Haes Alhelou, M.E. Hamedani-Golshan, T.C. Njenda, P. Siano, A survey on power system blackout and cascading events: Research motivations and challenges. Energies 12(4), 682 (2019). (Jan)
H.H. Alhelou, M.E. Golshan, N.D. Hatziargyriou, A decentralized functional observer based optimal LFC considering unknown inputs, uncertainties, and cyber-attacks. IEEE Trans. Power Syst. 34(6), 4408–4417 (2019). (May 13)
H.H. Alhelou, M.E. Golshan, N.D. Hatziargyriou, Deterministic dynamic state estimation-based optimal lfc for interconnected power systems using unknown input observer. IEEE Trans. Smart Grid. 2019 Sep 9
H.H. Alhelou, S.J. Mirjalili, R. Zamani, P. Siano, Assessing the optimal generation technology mix determination considering demand response and EVs. Int. J. Electr. Power Energy Syst. 1(119), 105871 (2020). (Jul)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Maheswari, M., Suthanthira Vanitha, N., Loganathan, N. (2021). Wide-Area Measurement Systems and Phasor Measurement Units. In: Haes Alhelou, H., Abdelaziz, A.Y., Siano, P. (eds) Wide Area Power Systems Stability, Protection, and Security. Power Systems. Springer, Cham. https://doi.org/10.1007/978-3-030-54275-7_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-54275-7_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-54274-0
Online ISBN: 978-3-030-54275-7
eBook Packages: EnergyEnergy (R0)