
Abstract
In this chapter, we propose a method of analyzing the motion equations in the case of a beam in rotation in plane, in order to determine the domain of instability without actually calculating the eigenvalues or to integrate the obtained equations of motion. This can ease the computational effort needed to solve such a problem. Some examples are studied in the paper.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


1 Introduction
The first research in the field of elastic elements with a general rigid motion using numerical methods (especially Finite Element Method) has begun in the 1970s. The first studies were made for a single-beam one-dimensional finite element, using third-degree-shape functions. The complexity of the studied cases increased, and the method was developed for fifth-degree-shape polynomials. The method was used for a plane motion and for the three-dimensional rigid motion of a beam. In all these cases, a one-dimensional finite element was used [1,2,3,4,5]. The first model was a Bernoulli model. Other models, such as the Rayleigh model or Timoshenko model, were studied in [6,7,8,9,10,11]. Thereafter, the researchers developed two-dimensional and three-dimensional finite elements [12,13,14]. The developed models created new theoretical problems related to the methods of solving and qualitative analysis of such equations [15, 16]. To study a mechanical system with elastic elements which also involve a previous dynamical analysis, so we use of MBS (multibody models) models. In this paper, we propose to make a study, for a set of geometrical parameters, if the mechanical system is stable or not, in the case of a beam with a rotation around one of the ends. More elaborated models are made in [17,18,19].
In the study, an analysis is made of the motion equations in the case of a beam in rotation in plane, in order to determine the domain of instability without actually calculating the eigenvalues or to integrate the obtained equations of motion. This problem can be important in the engineering of the multibody with elastic elements.
2 One-Dimensional Finite Element
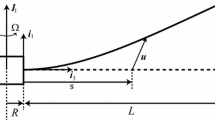
The problem of the study of a one-dimensional finite element in a centrifugal field was made by many researchers, for a general three-dimensional motion and for a plane motion [12, 14]. In the following, we will use the notation from [4, 5] in order to obtain the motion equations for a single element. We need this approach to apply our proposal concerning the study of such a system. Let’s consider a point M of beam and its displacements [δ(u, v, w)] that can be expressed in terms of nodal displacements at the ends as follows:
where we have the vector of nodal displacements {δe}:
where {δe} is the displacement vector for e-th finite element in the local coordinate system, δ_1 and δ_2, are, respectively, the displacement vectors of the nodes one and two.
Consider a finite element with a rotational motion around an axis. The nodal coordinates: the displacements of the beam ends in the three directions x, y, and z, the torsion angles at the end, the angles of rotation β and γ of the cross section at ends around the two y and z axes, and the curvatures of the neutral axis in the two xOz and xOy planes at both ends. If we consider the two ends, then the displacements at the ends, the rotations, and the curves are [20]:
where β1, γ1 and β2, γ2 are the slopes of the ends of the beam; α1 and α2 represent the torsion of the end sections; mxOz1, mxOy1 and mxOz2, mxOy2 are the curvatures in the corresponding plane.
If v and w are the displacements of a beam point on the directions Oy and Oz, respectively, we shall have the equations known from the continuum mechanics [12]:
The matrix [N] contains shape functions. The lines of the matrix [N] correspond to the displacements u, v, and w. We have denoted as N(u), N(v), and N(w):
The displacements of the nodes at beam ends (left and right ends) have been named {δ_1} and {δ_2}.
For the rotations angles, we have:
where: \(\left[ {N^{*} } \right] = \left[ {\begin{array}{*{20}c} {N_{\left( \alpha \right)}^{*} } \\ {N_{\left( \beta \right)}^{*} } \\ {N_{\left( \gamma \right)}^{*} } \\ \end{array} } \right]\). Can be noted that: \(\left[ {N_{\left( \beta \right)}^{*} } \right] = \left[ {N_{w}^{\prime} } \right]\) and \(\left[ {N_{\left( \gamma \right)}^{*} } \right] = \left[ {N_{v}^{\prime} } \right]\).
For axial displacements u linear interpolation polynomials are chosen:
with:
Let us consider now the transversal displacements v and w:
The interpolation polynomials will be chosen as:
The shape function matrix is:
The rotations of the beam ends can be obtained as:
Let’s also note:
So:
The internal energy stored in the beam shall be calculated. The internal energy due to bending is given by the relation:
where E is Young’s modulus, Iy and Iz represent the geometrical moment of inertia around the axis Oy and Oz.
The energy due to the tension/compression is:
where A is the area of the cross section of the beam.
The axial load P in an axial section of the beam gives the energy if in a first approximation the axial deformations are neglected:
where Ptot represents the axial force in the beam cross section at distance x. The force components acting at the right beam end considered in the local coordinate system are represented by Px, Py = 0, Pz = 0. Beside these components, the value of P and the components of the inertia forces acting upon the portion of the beam between x and L are being determined.
The total internal energy is:
The external work of distributed loads is:
here the vector {q *eL } contains the three components of the distributed loads and the three components of the distributed moments.
The external work of concentrated loads {qeL} in the nodes is:
After deformation, the position vector of point M becomes M′ and it is expressed by:
or, with respect to the global coordinate system:
where the matrix [R] expresses the change of the component of a vector from the local coordinate system Oxyz to the fixed (global) reference system O′XYZ. The velocity is obtained by differentiation:
The kinetic energy expression is:
where:
Iyy and Izz represent moments of inertia of the beam cross section about coordinate axis Oy and Oz, respectively, of a reference system with its origin in the mass center of the element dm = ρAdx (ρ-density); Ixx is the inertia moment about the co-ordinate axis Ox. We have chosen y and z as principal directions of inertia Iyz = 0, we have:
here ω1L, ω2L, ω3L are the components of the vector angular velocity refer to the local coordinate system.
The Lagrangian for one is:
Applying the Lagrange’s equations [21,22,23,24]:
the motion equations for a single element in a centrifugal field can be obtained in the form:
where:
3 Eigenvalues and Domain of Stability
In the following, it was studied a beam that is in a centrifugal field, following how the eigenvalues of the system change according to the variation of the beam geometrical parameters. Considering a certain number of finite elements in which the structure is discretized, after assembling, the motion equations will be of the form:
The matrix [C] is skew-symmetric. If we note:
The beam is considered clamped to one end and has a rotation motion around this end with variable angular speed ω.
To perform the calculus, we used the soft MATLAB with its classical subroutines (Figs. 1 and 2).

Eigen pulsations for a beam with L = 0.55 m (D variable and ω variable)

Eigen pulsations for a beam with L = 0.55 m and L = 1 m (D variable and ω variable). The first eigenvalue
The motion equations become a linear differential system of the form:
In a previous paper, it has been shown that the skew-symmetric matrix [C] does not change the nature of the system matrix’s eigenvalues (35). The eigenvalues will be complex, without a real part (the Coriolis matrix doesn’t introduce damping in the system) (Figs. 3 and 4).

Eigen pulsations for a beam with L = 0.55 … 0.1 m (D variable and ω variable). The first eigenvalue

Eigen pulsations for a beam with L = 0.55 … 1 m (D variable and ω variable). The fifth eigenvalue
The problem arising in calculating a beam in a centrifugal field is the loss of stability, which happens from a mathematical point of view, when the stiffness matrix becomes negatively defined.
It is virtually impossible to determine analytical expressions to determine the geometric and mass field that ensures the stability of the beam in the centrifugal field. In this case, a numerical analysis can be made to determine the nature of the values.
The numerical calculus of eigenvalues and eigenvectors for a matrix is a difficult operation that consumes time resources. A simpler method is to determine whether the stiffened matrix is positively defined. For a set of defining values for the beam, it is determined whether the matrix is positively defined. If it is negatively defined then the beam enters into a field of instability. In the paper, the stiffness matrix was analyzed for different sets of beam length, diameter, and angular speeds with which the beam is rotated in a centrifugal field. Figures 5, 6 and 7 show these results. The areas in which we have instability are hatched in the figure.

Domain of instability for D, ω, L variable

Domain of instability for D, ω, L variable

Domain of instability for D, ω, L variable
4 Conclusions
Operation of a machine element that can be modeled as a beam, being in a centrifugal field, can lead to instability phenomena, especially for the reason that the rotations can be found frequently in technical applications. For this reason, it is the question of determining the admissible values for geometric and mass elements. Because a theoretical approach is less useful in practical applications, only the numerical approach can provide useful results. In the paper, the motion equations obtained by other authors have been used, in a particular form, for the rotation of a beam around an axis. On the basis of these equations obtained via FEA, it is analyzed for some cases, the domain of values that the geometric and mass parameters can have. The results are presented in graphical form and the method used to determine areas of instability uses the calculation of the positivity of the stiffness matrix, a much easier operation than the calculation of its eigenvalues. Our application is inspired from the practical case of the rotor blade of helicopters, where the use of one-dimensional finite element has the advantage of simplicity and offers, in the same time, good results. Such kind of problems occurs often in the engineering practice where great operation speed and high loads can lead to instability.
References
A.G. Erdman, G.N. Sandor, A. Oakberg, A general method for kineto-elastodynamic analysis and synthesis of mechanisms. J. Eng. Ind. ASME Trans. 94(4), 1193–1203 (1972)
P. Fanghella, C. Galletti, G. Torre, An explicit independent-coordinate formulation for equations of motion of flexible multibody systems. Mech. Mach. Theory 38, 417–437 (2003)
B.S. Thompson, C.K. Sung, A survey of finite element techniques for mechanism design. Mech. Mach. Theory 21(4), 351–359 (1986)
S. Vlase, Finite element analysis of the planar mechanisms: numerical aspects. Appl. Mech. 4, 90–100 (1992)
S. Vlase, Dynamical response of a multibody system with flexible element with a general three-dimensional motion. Rom. J. Phys. 57(3–4), 676–693 (2012)
J.-F. Deu, A.C. Galucio, R. Ohayon, Dynamic responses of flexible-link mechanisms with passive/active damping treatment. Comput. Struct. 86(35), 258–265 (2008)
D. De Falco, E. Pennestri, L. Vita, An investigation of the influence of pseudoinverse matrix calculations on multibody dynamics by means of the Udwadia-Kalaba formulation. J. Aerosp. Eng. 22(4), 365–372 (2009)
J. Gerstmayr, J. Schberl, A 3D finite element method for flexible multibody systems. Multibody Syst. Dyn. 15(4), 305–320 (2006)
A. Ibrahimbegovic, S. Mamouri, R.L. Taylor, A.J. Chen, Finite element method in dynamics of flexible multibody systems: modeling of holonomic constraints and energy conserving integration schemes. Multibody Syst. Dyn. 4(2–3), 195–223 (2000)
N.V. Khang, Kronecker product and a new matrix form of Lagrangian equations with multipliers for constrained multibody systems. Mech. Res. Commun. 38(4), 294–299 (2011)
G. Piras, W.L. Cleghorn, J.K. Mills, Dynamic finite-element analysis of a planar high speed, high-precision parallel manipulator with flexible links. Mech. Mach. Theory 40(7), 849–862 (2005)
S. Vlase, P.P. Teodorescu, Elasto-dynamics of a solid with a general “Rigid” motion using FEM model part I. Theoretical approach. Rom. J. Phys. 58(7–8), 872–881 (2013)
S. Vlase, P.P. Teodorescu, C. Itu et al., Elasto-dynamics of a solid with a general “Rigid” motion using FEM model part II. Analysis of a double cardan joint. Rom. J. Phys. 58(7–8), 882–892 (2013)
S. Vlase, C. Danasel, M.L. Scutaru, M. Mihalcica, Finite element analysis of two-dimensional linear elastic systems with a plane rigid motion. Rom. J. Phys. 59(5–6), 476–487 (2014)
B. Simeon, On Lagrange multipliers in flexible multibody dynamic. Comput. Methods Appl. Mech. Eng. 195(50–51), 6993–7005 (2006)
S. Vlase, M. Marin, A. Öchsner et al., Motion equation for a flexible one-dimensional element used in the dynamical analysis of a multibody system. Continuum Mech. Thermodyn. 31, 715 (2019). https://doi.org/10.1007/s00161-018-0722-y
M. Marin, A. Oechsner, The effect of a dipolar structure on the Holder stability in Green-Naghdi thermoelasticity. Continuum Mech. Thermodyn. 29(6), 1365–1374 (2017)
M. Marin, Cesaro means in thermoelasticity of dipolar bodies. Acta Mech. 122(1–4), 155–168 (1997)
M. Marin, A. Öchsner, Complements of Higher Mathematics (Springer, Cham, 2018)
A. Öchsner, Computational Statics and Dynamics: An Introduction Based on the Finite Element Method (Springer, Singapore, 2016)
I. Negrean, New Formulations in Analytical Dynamics of Systems, Acta Technica Napocensis. Applied Mathematics, Mechanics and Engineering, vol. 60, issue I (2017), pp. 49–56
I. Negrean, Mass Distribution in Analytical Dynamics of Systems, Acta Technica Napocensis. Applied Mathematics, Mechanics and Engineering, vol. 60, issue II (2017), pp. 175–184
I. Negrean, Generalized Forces in Analytical Dynamics of Systems, Acta Technica Napocensis. Applied Mathematics, Mechanics and Engineering, vol. 60, issue III (2017), pp. 357–368
S. Vlase, A Method of eliminating Lagrangian-Multipliers from the Equation of Motion of Interconnected Mechanical Systems. J. Appl. Mech. Trans. ASME 54(1), 235–237 (1987)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Chircan, E., Scutaru, M.L., Toderiţă, A. (2021). Dynamical Response of a Beam in a Centrifugal Field Using the Finite Element Method. In: Herisanu, N., Marinca, V. (eds) Acoustics and Vibration of Mechanical Structures—AVMS 2019. Springer Proceedings in Physics, vol 251. Springer, Cham. https://doi.org/10.1007/978-3-030-54136-1_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-54136-1_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-54135-4
Online ISBN: 978-3-030-54136-1
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)