
Abstract
In the era of Predictive, Preventive, and Personalized Medicine (PPPM), dispensing the drug to the right patient, the right dose, at the right time is crucial. The focus of this paper is to determine the optimal dimensions of Free-Fall-Flow-Rack AS/RS used in pharmacy, minimizing the service time. Since the number of rack segments is discrete, we formulate this problem as a nonlinear discrete optimization, where the objective function is provided by an analytical model of the retrieval travel-time. The results show that this method is well-suited to find the optimal rack dimensions with accuracy by taking into account the real nature of the rack face which is discrete and not continuous.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Automated storage and retrieval systems (AS/RSs)
- Free-fall-flow rack AS/RS
- Discrete optimization
- Retrieval travel-time
- Automated dispensing system
1 Introduction
Medicine is changing paradigm; it is switching from diagnosis and treatment to prediction and prevention. This is encompassed in the new concept of Predictive, Preventive and Personalized Medicine (PPPM). “True personalised medicine” is based on the “individual patient profile” directing to a tailored therapy that maximises the efficacy for that one patient in particular [12].
Going from a reactive medicine to a proactive medicine has multiple consequences for the management of the medication-use process within a healthcare structure, including an increase in the number of drug references underlying the individualization of treatments. In this context, automated dispensing systems are a key choice to meet the demands of speed and accuracy of patient service.
Materials handling technologies have enabled companies to control and manage their inventory. This can be achieved through an automated storage and retrieval system (AS / RS). AS / RSs are used in multiple industries and advanced manufacturing systems [30]. The main advantages of these systems are the saving of labor and floor space costs, the ease and speed of handling items and enhance throughput [21].
The main components of an AS/RS are storage racks, aisles, storage and retrieval (S/R) machines, Input/output stations (I/O) stations and the control system. Racks consist of several bins that can store items. The racks are separated by aisles, which allow the movement of storage and retrieval machines to pick up and drop off loads. The Input/output stations (I/O) receive incoming and outgoing products. The control system is used for managing storage and retrieval operations.
There are different types of ASRS, namely, unit-load AS/RS, mini-load AS/RS, man-on-board AS/RS, carousel AS/RS, multi aisles AS/RS, Mobil-racks AS/RS, and flow-rack AS/RS (deep-lane AS/RS).
A new kind of flow-rack AS/RS has been introduced by MEKAPHARM [23], this system is served by a human operator or a single machine for storage operations, and combines the free-fall movement and a transport conveyor for retrieval operations. It can operate without any storage/retrieval machines, compared to the classic flow-rack AS/RS, where the system uses a (S/R) machine.
Since AS/RS require a very high investment, the design of AS/RS represents a crucial step during the feasibility conception study. In fact, once the AS/RS is implemented, it is very difficult to modify the rack layout and storage capacity. For this, the purpose of this paper is to find the optimal dimensions (length, height and depth) of the rack, which minimize the retrieval-travel-time. We formulate the optimization problem as a non-linear discrete model instead of a continuous model, which does not reflect the discrete nature of the rack. The aim of this study is to give a practical support to the AS/RS designer.
The structure of the paper is as follows. Section 2 gives an overview of the previous research. The FF-flow-rack AS/RS operation and structure are presented in Sect. 3. The optimization model and the obtained results are provided and discussed in Sect. 4. Section 5 draw conclusion and further research.
2 Literature Review
Different approaches have been proposed to increase the AS/RS performance by the means of request sequencing, storage assignment policy, and system configuration. The expected travel time was the main indicator used to assess the AS/RS performance.
Several studies exist on the modelling of the expected travel time. The most interesting approach to this issue has been proposed by Bozer and White [5]. They developed the expected single and dual travel time models of a rectangular rack under a random storage and for different positions of input/output point. Additionally, various dwell-point strategies for the storage/retrieval machine were examined. This model was used by Sari et al. [28], where they presented two mathematical models for the expected travel-time for a flow-rack AS/RS, which use two (S/R) machines. The first model is developed by using a continuous approach and compared with a second discrete model for accuracy via simulation. The authors conclude that the expressions based on continuous approach are extremely practical due to the difference in computation time.
For other flow-rack AS/RS variations, Sari and Bessnouci [27] have proposed a new kind of flow-rack AS/RS that using a single machine for both storage and retrieval operations instead of two machines. They developed analytical-travel-time models of the storage and retrieval machine, under randomized storage assignment. Two dwell point positions were considered. Otherwise, De Koster et al. [10] used a lifting mechanism in the opposite face of the S/R machine for a flow-rack AS/RS. They presented a closed-form expression of expected retrieval travel-time for single-command cycles, and derived an approximate travel-time expression for dual command cycles of the system. Also, Chen et al. [7] designed a bi-directional flow-rack (BFR) in which bins in adjacent columns slope to opposite directions. They develop a travel-time model for BFR systems.
Various methods have been proposed to deal with reducing the travel time for the flow-rack AS/RS. Sari et al. [29] Studied the impact of P/D stations and restoring conveyor locations on expected retrieval-time and classified their optimal positions. Meghelli-Gaouar and Sari [22] used a two class-based storage policy for the flow-rack AS/RS, where each item is assigned to the same bin as closely as possible to the P/D point. This work was extended by Bessenouci et al. [4] by developing two metaheuristic algorithms (tabu search and simulated annealing) applied to the control of the S/R machine. Hachemi and Alla [13] presented an optimization method of retrieval sequencing where the AS/RS was represented by a colored Petri net model. In a recent paper, Hachemi and Besombes [14], extended the problem of retrieval sequencing for flow-rack AS/RS by integrating the product expiry date. They introduced an optimization method as a decision process which performs a real-time optimization into two phases and formulated as an integer program. Kota et al. [16] Developed analytical expressions for retrieval times and heuristic algorithms to determine optimal or near-optimal movement of objects in a high-density, puzzle-based storage system.
Various researchers study the sequencing problem for different type of AS/RS. Chung and Lee [8] introduced heuristic methods to solve a generalized sequencing problem for unit-load AS/RS. These methods determine both specific bin locations for the retrieval requests and sequencing with the chosen bin locations. From a series of realistic case problems Kuo etal. [18] proposed a cycle-time model for class-based storage policies for automated unit load AS/RS that use autonomous vehicle technology. The model was designed specifically for the practice of AVS/RS design conceptualization by utilizing a network queuing approach. In order to minimize the distance travelled by the Storage and Retrieval (S/R) machine. Asokan et al. [3] implemented non-traditional optimization techniques (Adaptive Genetic Algorithm (AGA) and Particle Swarm Optimization (PSO)). In order to optimize the performance of man on board AS/RS, Dallari et al. [9] compares different storage policies with two tour construction heuristic. Authors conclude that the introduction of BI heuristic and class based storage policy provide substantial travel time reduction. According to (Fohn et al. [11]; Robert terry et al. [26]), AS/RS designs are difficult because these systems evolve in highly dynamic environments. For this, an optimal design procedure should be combined with control policies.
AS/RS design has received some attention in the literature. Ashayeri et al. [2] proposed a microcomputer-based optimization model to calculate the optimum number of racks and the optimum width and length of automated warehouses. Malmborg [20] studied the design and modelling of double-shuttle AS/RS. Kuo etal. [17] proposed effective design calculation models for unit load AS/RS using autonomous vehicle technology. Yang et al. [32] deals with the optimization of 3D multi-deep AS/RS with a full turnover-based storage policy by considering the operating characteristics of the S/R machine, to close to the real operation of the compact warehouse.
De Koster et al. [10] derived the expressions of the expected travel time for single and dual command cycle of flow-rack AS/RS that used a lifting mechanism. They used these expressions to optimize the systems dimensions. The authors found that the cubic-in-time system (i.e. all dimensions are equal in time) is not the optimal configuration. This work was extended by Yang et al. [31], who considered the real operating characteristics of the S/R machine to obtain the optimal rack dimensions. Concerning the AS/RS introduced by Sari and Bessnouci [27]. Hamzaoui and Sari [15] determined the optimal dimensions of this AS/RS by using an enumeration technique. These dimensions minimize the expected travel times of the S/R machine.
An interesting study that was presented by Meneghetti et al. [24]. The authors proposed the adoption of a two-stage design approach of unit-load AS/RS by taking into account the economical and environmental perspectives (energy consumption, costs and carbon dioxide emissions). Based on discrete events simulation Caputo and Pelagagge [6] check and identify correct design choices for capacity upgrade of large-intensive material handling and storage systems. Asef-Vaziri et al. [1] designed and analyzed an automated container handling and storage system, which integrates AS/RS and Automated Guided Vehicle Systems (AGVS) for use at seaport terminals. They performed a computer simulation study to show the impact of such automation on the system performance (throughput, space utilization, and equipment utilization). Lättilä et al. [19] developed a decision-making tool based on the combination between static spreadsheet modelling and Monte Carlo simulation. This tool was used to compare warehouse design, calculate investment payback time of two suggested AS/RS investments, and to identify the main factors affecting their economic feasibility.
3 FF-Flow-Rack AS/RS
3.1 System Description and Structure
Mekapharm company® has launched a new type of flow-rack AS / RS, known under the trade name “APOTEKA” [23]. It is mainly used in all areas handling products resistant to free fall impact, and in particular for the automation of drug distribution in pharmacies. We are referring to the new type of AS / RS: the Free-Fall-flow rack AS/RS, or FF-Flow-rack AS/RS. The most important divergence between the FF-flow-rack AS/RS and the other types of flow-rack AS/RS presented by (Sari et al. [28]; De Koster et al. [10]; Sari and Bessnouci [27]) is that the picking operations are realized by combining the free-fall movement and transport conveyor to replace the retrieval machine.
The use of FF-flow-rack AS/RS has several advantages like: saving the floor space, better inventory management, throughput increasing, and removal of the S/R machines. Especially, in the pharmaceutical distribution, this system offers the possibility of simultaneous retrieval of several drugs, reduces customer wait time, reduces queue sizes leading more time for advising customers, and reduces the dispensing error.
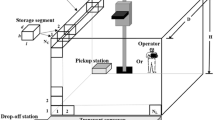
As shown in Fig. 1, the FF-flow-rack AS/RS structure is built of: a deep rack with a multitude of sloping bins, equipped with rolling wheels to allow the sliding of products by gravity from the storage to the picking side. Each bin is made of a set of segments (locations) that contains multiple identical products (the same SKU: Stock Keeping Unit) placed according to a FIFO file. A pickup station is located on the storage side, and a drop-off station is located on the retrieval side. A transport conveyor used to make the connection between the rack and the drop-off station. An operator or a storage crane performs the storage of items. The Fig. 2 shows a real view of the Apoteka© system.

Typical configuration of FF-flow-rack AS/RS

Real view of the Apoteka system
As illustrated in Fig. 1, the rack dimensions are: length (L), height (H) and depth (D). The rack has (N L) bins in each tier and (N c) bins in each column. Each bin has (M) storage segments. Since the use of a person for the storage operation, the maximum height of the rack should be less than 3 m, in regard to practical and ergonomic considerations.
3.2 System Operation
The FF-flow-rack AS/RS operating is as follows:
-
(a)
The storage operation is fulfilled by a storage machine or an operator, where the products are moved from the pickup station to store them in the corresponding bins.
-
(b)
The retrieval operation is done in two steps: The first one is the ejection of the item, where it is accomplished by the excitement of the electromagnet of the bin containing the desired product. This induces the free fall of the product on the transport conveyor. The second step is the product transport by the conveyor until the drop-off station.
The ejection of a product causes the progressive sliding by the gravity of all other products in the bin, as shown in Fig. 3 that highlight the layout of products inside a bin.

Product layout inside a storage bin
3.3 Retrieval Travel Time Model
Eq (1) gives expected retrieval-travel-time models that have been developed by Metahri and Hachemi [25].
Where:
-
L, H the length and height of the rack
-
V c the speed of the transport conveyor
-
g the acceleration due to gravity
-
\( E\left({T}_g^{\prime}\right) \) the expected retrieval travel-time
4 Rack Dimensions Optimization
4.1 Problem Statement
The rack dimensions are a key of AS/RS performance improvement.
However, space constraints require that rack dimensions must not exceed the admissible values (L A, H A, DA), the storage capacity is fixed into N storage segments, and the segment dimensions (l, h, d) are predefined. Consequently, there are several possible configurations to design this system (See Fig. 4), so what are the optimal rack-dimensions that lead to the minimum retrieval travel time? In order to solve this problem, we built an optimization model where the objective function to be minimized is the non-linear function of the retrieval travel time \( E\left({T}_g^{\prime}\right) \).

Depiction of the admissible and possible rack dimensions
To purchase this aim, we have developed a discrete optimization model which matches more accurately the real nature of the rack. Indeed, the enumeration technique is not practical because it leads to a combinatorial explosion, while a continuous model does not reflect the nature of the rack. In the continuous approach, approximating a solution to the nearest integer does not necessarily correspond to the optimal solution.
4.2 Optimization Model Formulation
Let us first introduce the following notations.
-
Parameters:
-
L A, H A, DA the admissible length, height and depth of the rack
-
l, h, d the length, height and depth of a storage segment.
-
N LA, N CA, MA the admissible number of bins per line, column and segments in each bin. Where: N LA = L A/l, N CA = H A/h, M A = D A/d.
-
V c the speed of the transport conveyor
-
N the storage capacity (total number of bins)
-
N A the admissible storage capacity
-
Variables:
-
m the number of bins per line
-
n the number of bins per column
-
q the number of segments in each bin
-
Recall that \( E\left({T}_g^{\prime}\right)=\frac{1}{2\ {V}_c}L+\frac{2}{3}C\sqrt{H} \)
-
m = L/l, n = H/h, q = D/d
So, the optimization problem can be formulated as follows:
Subject to the following constraints:
Where:
-
The objective (2) minimizes the retrieval time,
-
The constraints (3, 4 and 5) ensure that the dimensions of the rack are limited to the admissible values.
-
The constraint (6) allows the rack storage capacity to be greater or equal to the admissible storage capacity.
-
The constraint (7) ensures that decision variables are integers.
We propose a flow chart that effectively shows the different part of the discrete optimization model. As outlined in Fig. 5, the model evolves the following phases:
-
Initialization of system parameters such as the storage capacity N, the admissible dimensions of the rack (L A, H A, DA), the storage segment dimensions (l, h, d), and the transport conveyor velocity V c.
-
Determination of the resulted optimal dimensions of m, n, and q which are noted N Lo, N Co, Mo, respectively. Where: N Lo = L o/l, N Co = H o/h, M o = D o/d.

Flow chart of the discrete optimization model
4.3 Optimization Results and Discussion
In order to show the effectiveness of the optimization method, we consider different configurations of industrial-sized problems with a storage capacity ranging from 400 to 27,000 segments. For each storage capacity, we assumed that the dimensions of storage segment are (l, h, d) = (0.15; 0.10; 0.10)(m), and the transport conveyor velocity is: V C = 3m/s.
Moreover, the optimization problem is solved using Generalized Reduced Gradient (GRG) solver, and executed on a PC with 2.17 GHz CPU and 2 GB RAM. In our study, we used the GRG solver because the optimized model is a discrete nonlinear problem.
To illustrate the optimization procedure, Table 1 presents the optimization results of 20 storage capacities. Columns 2, 3 and 4 of this table represent the studied storage capacity (N), the admissible dimensions (L A, H A, DA) and the optimal configuration (N Lo, N Co, Mo), respectively. While, Columns 5 and Column 6 represent the optimal dimensions (L o, H o, Do) and their corresponding retrieval travel time \( E\left({T}_g^{\prime}\right) \), respectively.
The analysis of the results allowed us to make the following insights:
-
The optimal rack is not cubic-in-time (i.e. travel time along length, high, and depth are not equal).
-
The optimization model tends generally to choose the maximum possible depth, and prevails rather the height to the length.
-
The computing time is very short (few seconds).
5 Conclusion
According to the fact that automated drug dispensing systems better meet the requirements of the PPP medicine, we are interested, in this paper, in the determination of the optimal configuration of an automated dispensing system based on a free-fall-flow-rack AS/RS. A useful way to do this is to determine the expression of the expected retrieval travel time and minimize it through an optimization model. We first presented an overview of the FF flow-rack AS/RS structure and then we presented its analytical retrieval time. Subsequently, we formulate this problem as a discrete nonlinear optimization model, which is solved by using Generalized Reduced Gradient (GRG) solver.
To show the power of the optimization method we applied the proposed model on different rack configurations under the constraints on the admissible dimensions and storage capacity. The results show that rack configuration has a significant effect on the expected retrieval time, and the optimal rack is not cubic-in-time (i.e. travel time along length, high, and depth are not equal). In addition, we find that the optimization model generally favors longer depth over the other two dimensions in retrieval time optimization. Note that the solving time for industrial sized rack configurations is very short (few seconds). This optimization method could be very useful for the AS/RS designer. Subsequently, according to numerical study the optimization model tends generally to choose the maximum possible depth then it prevails rather the height to the length. This optimization method could be used to give a decision support to the AS/RS designer.
In our future research, we will perform a comparison study in order to evaluate the gap between this approach and the continuous optimization approach, and investigate the optimal location of the drop-off station that minimize the retrieval travel time of the FF-flow-rack AS/RS.
References
Asef-Vaziri, A., Khoshnevis, B., Rahimi, M.: Design and analysis of an automated container handling system in seaports. Int. J. Agile Syst. Manag. 3(1–2), 112–126 (2008)
Ashayeri, J., Gelders, L., Wassenhove, L.V.: A microcomputer-based optimization model for the design of automated warehouses. Int. J. Prod. Res. 23(4), 825–839 (1985)
Asokan, P., Jerald, J., Arunachalam, S., Page, T.: Application of adaptive genetic algorithm and particle swarm optimisation in scheduling of jobs and AS/RS in FMS. Int. J. Manuf. Res. 3(4), 393–405 (2008)
Bessenouci, H.N., Sari, Z., Ghomri, L.: Metaheuristic based control of a flow rack automated storage retrieval system. J. Intell. Manuf. 23(4), 1157–1166 (2012)
Bozer, Y.A., White, J.A.: Travel-time models for automated storage/retrieval systems. IIE Trans. 16(4), 329–338 (1984)
Caputo, A.C., Pelagagge, P.M.: Capacity upgrade criteria of large-intensive material handling and storage systems: a case study. J. Manuf. Technol. Manag. 19(8), 953–978 (2008)
Chen, Z., Li, X., Gupta, J.N.: A bi-directional flow-rack automated storage and retrieval system for unit-load warehouses. Int. J. Prod. Res. 53(14), 4176–4188 (2015)
Chung, E., Lee, H.F.: A generalised sequencing problem for unit-load automated storage and retrieval systems. Int. J. Ind. Syst. Eng. 2(4), 393–412 (2007)
Dallari, F., Marchet, G., Ruggeri, R.: Optimisation of man-on-board automated storage/retrieval systems. Integr. Manuf. Syst. 11(2), 87–93 (2000)
De Koster, R.M.B., Le-Duc, T., Yugang, Y.: Optimal storage rack design for a 3-dimensional compact AS/RS. Int. J. Prod. Res. 46(6), 1495–1514 (2008)
Fohn, S.M., Greef, A.R., Young, R.E., O'Grady, P.J.: A constraint-system shell to support concurrent engineering approaches to design. Artif. Intell. Eng. 9(1), 1–17 (1994)
Golubnitschaja, O., Baban, B., Boniolo, G., Wang, W., Bubnov, R., Kapalla, M., et al.: Medicine in the early twenty-first century: paradigm and anticipation-EPMA position paper 2016. EPMA J. 7(1), 23 (2016)
Hachemi, K., & Alla, H. (2008). Pilotage dynamique d'un système automatisé de stockage/déstockage à convoyeur gravitationnel. J. Eur. Syst. Automatisés (JESA), 42(5/2008), 487–508
Hachemi, K., Besombes, B.: Integration of products expiry dates in optimal scheduling of storage/retrieval operations for a flow-rack AS/RS. Int. J. Ind. Syst. Eng. 15(2), 216–233 (2013)
Hamzaoui, M.A., Sari, Z.: Optimal dimensions minimizing expected travel time of a single machine flow rack AS/RS. Mechatronics. 31, 158–168 (2015)
Kota, V.R., Taylor, D., Gue, K.R.: Retrieval time performance in puzzle-based storage systems. J. Manuf. Technol. Manag. 26(4), 582–602 (2015)
Kuo, P.H., Krishnamurthy, A., Malmborg, C.J.: Design models for unit load storage and retrieval systems using autonomous vehicle technology and resource conserving storage and dwell point policies. Appl. Math. Model. 31(10), 2332–2346 (2007)
Kuo, P.H., Krishnamurthy, A., Malmborg, C.J.: Performance modelling of autonomous vehicle storage and retrieval systems using class-based storage policies. Int. J. Comput. Appl. Technol. 31(3–4), 238–248 (2008)
Lättilä, L., Saranen, J., Hilmola, O.P.: Decision support system for AS/RS investments: real benefits out of Monte Carlo simulation. Int. J. Technol. Intell. Plan. 9(2), 108–125 (2013)
Malmborg, C.J.: Interleaving models for the analysis of twin shuttle automated storage and retrieval systems. Int. J. Prod. Res. 38(18), 4599–4610 (2000)
Mathisen, K.: From traditional stacks to an automated storage and retrieval system. Libr. Manag. 26(1/2), 97–101 (2005)
Meghelli-Gaouar, N., Sari, Z.: Assessment of performance of a class-based storage in a flow-rack AS/RS. J. Stud. Manuf. 1(2–3), 100–107 (2010)
MEKAPHARM: C. Fiche caractristiques de l’automate APOTEKA (2016). http://mekapharm.com/apoteka/.1999. Accessed 22 Oct 2016
Meneghetti, A., Borgo, E.D., Monti, L.: Decision support optimisation models for design of sustainable automated warehouses. Int. J. Shipp. Transport. Logist. 7(3), 266–294 (2015)
Metahri, D., Hachemi, K.: Retrieval–travel-time model for free-fall-flow-rack automated storage and retrieval system. J. Ind. Eng. Int. 14(4), 807–820 (2018)
Robert Terry, W., RAO, H.G., SON, J.Y.: Application of a computer-based approach to designing real-time control software for an integrated robotic assembly and automated storage/retrieval system. Int. J. Prod. Res. 26(10), 1593–1604 (1988)
Sari, Z., Bessnouci, N. H.: Design & modeling of a single machine flow rack AS. RS, proceeding of IMHRC2012, Gardanne, France (2012)
Sari, Z., Saygin, C., Ghouali, N.: Travel-time models for flow-rack automated storage and retrieval systems. Int. J. Adv. Manuf. Technol. 25(9), 979–987 (2005)
Sari, Z., Grasman, S.E., Ghouali, N.: Impact of pickup/delivery stations and restoring conveyor locations on retrieval time models of flow-rack automated storage and retrieval systems. Prod. Plan. Control. 18(2), 105–116 (2007)
Van Den Berg, J.P., Gademann, A.J.R.M.: Simulation study of an automated storage/retrieval system. Int. J. Prod. Res. 38(6), 1339–1356 (2000)
Yang, P., Miao, L., Xue, Z., Qin, L.: Optimal storage rack design for a multi-deep compact AS/RS considering the acceleration/deceleration of the storage and retrieval machine. Int. J. Prod. Res. 53(3), 929–943 (2015)
Yang, P., Yang, K., Qi, M., Miao, L., Ye, B.: Designing the optimal multi-deep AS/RS storage rack under full turnover-based storage policy based on non-approximate speed model of S/R machine. Transport. Res. Part E Logist. Transport. Rev. 104, 113–130 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Metahri, D., Hachemi, K. (2020). Discrete Optimization Model of Free-Fall-Flow-Rack Based Automated Drug Dispensing System. In: Chaari, L. (eds) Digital Health in Focus of Predictive, Preventive and Personalised Medicine. Advances in Predictive, Preventive and Personalised Medicine, vol 12. Springer, Cham. https://doi.org/10.1007/978-3-030-49815-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-49815-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-49814-6
Online ISBN: 978-3-030-49815-3
eBook Packages: MedicineMedicine (R0)