In preceding chapters, it was emphasized that the first task in innovative design is the problem definition. The problem is then transformed into functional requirements (FRs), then into design parameters (DPs) and process variables (PVs), the vectors that define the four domains of the design world. Design matrices give the relationship between these vectors. The Independence Axiom states that the FRs must always be independent of other FRs as DPs and PVs are chosen. In this chapter, the role of the Information axiom in creating the best design is presented, including how to measure the information content, how to make a design robust by satisfying the Independence Axiom and the Information Axiom. A coupled design has large information content, in some cases, approaching infinite information content, which implies that the design will never work as intended. An uncoupled design can be made to have zero information content, making the design easy to implement and the resulting design most reliable. The determination of information content is presented in this chapter with many examples.
Axiomatic Design consists of a simple and logical general design framework to deal with the design of products, services, or organizations. It provides designers with criteria to support decision-making along with all the steps of the designing process. Figure 11.1 depicts a simple workflow for the AD framework.
Sometimes academic research and academic career can be challenging in many different ways, especially to be a graduate student working on what appears to be a simple idea! Sometimes, it can be more challenging to advance “simple ideas” than solve some “complex problems.” Appearance can be deceiving in many fields, but especially in academia!
When a young professor was invited to join the faculty of a renowned technological university, he was overjoyed. The only problem was that the salary offer was much less than what he had been receiving at the current university he had been teaching for a few years. Furthermore, the housing cost and the tax on the house in the region where the technical university was located was at least double the cost of where he was. With three small children to educate, the offer was not as attractive as it first appeared. However, his wife thought that it would be a good thing for children’s education to go to the more expensive area and suffer financially! She had always been right on these matters, so they left a comfortable place and went to a more challenging environment.
When he got to the new university, there were many prominent professors in the department. Many of them were his professor when he was a student there a few years back. Furthermore, to earn his tenure, he could not offend too many of these senior professors. However, that was the first thing this young professor did! He came up with a view that the design education that had been taught at the university, which had been well recognized throughout the world, needs to be improved! The eminent professor in design and his younger professors in design believed in the notion that “design can be learned only through experience and no lectures and research are needed.” Therefore, when this new young professor proposed a contrary view, his new view was not well received, not only at this university but also throughout the national and international community of traditional design professors! Many openly criticized him. Since he had not yet had a tenured appointment, he told his wife that they should be mentally prepared to seek another job. Fortunately, the primary national funding agency for research liked his new idea on design and gave substantial funding to his design research project. Fortunately, he also got his tenure soon after he joined this new university—before the mandatory tenure date. Therefore, he could pursue his idea for a new design approach without worrying about his job!
Four graduate students were hired to work on AD. They all suffered since there was no precedent for the research they were conducting. One Ph.D. student was dealing with the question: “what is INFORMATION?” The second Axiom stated that the information content should be minimized.” He and his professor struggled with this question of information content and other related questions. They could not even state clearly the meaning of “information content.” They struggled with the question: “Is there more information in a square than in a circle?”
Somehow, this first Ph.D. student put together a doctoral thesis, which his advisor thought was good enough for his doctorate and should get his degree. The fact that he and his wife wanted to raise a family and that he had received an excellent job offer also weighed in on the decision of his advisor.
On the day of his thesis examination, the room was full of design professors. After the presentation, the senior professor in the design section of the department refused to pass him based on what the student presented, although his advisor explained the difficulty of his thesis topic! The objection was more on the research the young professor was conducting than what the graduate student had done! There was a shouting match between the Ph.D. candidate and the traditional design professor.
The faculty vote was against accepting the doctoral thesis by this student. The student stayed another six more months and finally passed the thesis examination. The contribution of his thesis was that it established the problematic questions the group had to answer related to the second axiom, i.e., “Minimize the information content.” The notion that the information in design is related to tolerances versus the nominal dimension was advanced, which was a promising beginning in formalizing the second axiom. Also, the idea that the information is related to the “design range” and the “system range” was advanced. Once these ideas were crystallized, much progress has been made, but the first Ph.D. student had to take the brunt of criticisms. Some people compared what this first Ph.D. student had gone through to what happens to the first-born piglet. A pig gives birth to many piglets at the same time, but the first piglet suffers the most to come out of the womb! The professor still thinks that he did a great job! Later many other researchers joined the AD research group and made many important contributions, including visiting professors, Professors H. Nakazawa and Professor G. Solenius.
The length of the Shore Line of Australia!
Sometimes, it is complicated to answer simple questions related to information, especially those related to geometry. For example, what is the length of the shoreline of Australia? How much information do we need to specify the length of the shoreline? Is it difficult to answer it? Why?
The difficulty is that although we draw shorelines around Australia, it is only approximate because what is presented as a straight line is made up of jagged lines. If we look at the jagged lines in higher magnification, they are made of more jagged lines. Mathematicians call it a “fractal,” a subset of Euclidean geometry. Fractal appears to be nearly the same at different levels of magnification. However, the area does not change much although the actual length can be much longer. Likewise, when we determine the information content related to FRs and DPs, we have to define the tolerance we need to satisfy within which we define these quantities. That is the functional independence is defined by the tolerance of interference we are willing to tolerate. Similar comments apply to DPs and PVs.
Similarly, when we specify FRs, DPs, and PVs, we have to define the tolerance within which we must satisfy them.
As it was shown in the previous chapter, the functional independence clearly distinguishes the preferred design alternatives. This is the case of the uncoupled and the decoupled design solutions, while coupled solutions shall be discarded or reformulated to attain functional independence. The Independence Axiom is therefore an early acceptance criterion for alternative solutions.
When more than one suitable design alternative exists, then the question that arises is: which solution is the best one? The answer can be found through the Information Axiom.
The process terminates after a number of iterations, according to the designer’s criterion.
11.2 The Information Axiom
The Information Axiom provides the last criterion in the choice of the best design solution. It can be stated as (Suh 2005, p. 23):
In a set of designs that satisfy the sameFRsand conform to the independenceaxiom, thebest is the one with the minimum informationcontent.
The Information Axiom lays on the information content, similar to that defined by Shannon (1948), which is based on the probability of success of each solution. For a single FR design, the mathematical expression of the information content, I, is:
$$ I = - \log_{2} p = \log_{2} \left( {\frac{1}{p}} \right) $$
(11.1)
where p is the probability of success of achieving a given FR.
Therefore, the information content of a design is null when its success is always guaranteed. For any other value of the probability between 0 and 1, the information content will be a positive number.
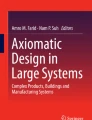
If the probability density function (pdf) of the existing FR is known, then the probability of accomplishing the FR can be computed by a quotient of areas, as shown in Fig. 11.2.
Fig. 11.2
The system range, the design range, and the common range
In Fig. 11.2, the system range represents the whole ability of the system, while the design range represents the working range that the designer is looking for. The common range is the intersection of the system and design ranges.
Most of the designs have a set of FRs that are satisfied by a set of DPs. The information content of those designs is a measure of the probability of the simultaneous success of all the FRs. Then, the information content of a design with m FRs is given by:
In some cases, a uniform distribution is assumed as an approximation.
11.3 Independence and Information Content
There are two types of designs where independence is fulfilled: uncoupled designs and decoupled designs. Uncoupled designs are always preferable to decoupled designs. Theorems 6 and 7 (Suh 2005, p. 46) relative to path dependency apply.
Theorem 6—Theinformation contentof an uncoupled design is independent of the sequence by which the DPs are changed to satisfy the given set of FRs.
Theorem 7—The information contents of coupled and decoupleddesignsdepend on the sequence by which the DPs are changed to satisfy the given set of FRs.
In uncoupled designs, each DP only affects one FR. As a consequence, the order in which they are attained is irrelevant and the information content of the design Itotal, is the algebraic sum of the individual information content, Ii, of the m FRs:
Consider a game that consists of throwing a dice once and withdrawing a card from a 52-card deck. A prize is awarded to anyone who has a “six” in the dice and a “king” in the cards. What is the probability of success? What is the information content of the designed game (in the player viewpoint)?
Solution: The result of the game is made of two independent events which order does not matter. Therefore:
The owner of a small coffee shop intends to provide customers with a new game consisting of the sequential throwing of two darts on a single target. Players earn a prize when they hit both darts in the center of the target. There are two alternatives (A and B) for the shape of the target, as shown in Fig. 11.3. Considering that the players always hit the target, what is the best game in the owner’s viewpoint?
The coffee shop would have better profitability with alternative B because alternative A is easier for the players.
Decoupled designs are designs where independence is also assured, but there is one only order to fulfil the FRs without the need of reiteration. Consider the 2-FR, 2-DP decoupled design equation presented below:
To satisfy both FRs at the first attempt, one should begin by choosing the value of DP1 as to satisfy FR1. The chosen value of DP1 also affects FR2, which must be then fulfilled by choosing the value of DP2. The information content of this design depends on the sequence by which DP1 and DP2 are chosen to satisfy FR1 and FR2. The satisfaction of FR1 through DP1 has a certain probability, p1, but the satisfaction of FR2 through DP2 only occurs after satisfaction of FR1 trough DP1. This is a case of conditional probability. The probability of satisfying FR2 is
It should be noted that in practice, the conditional probability is difficult to determine during the design phase.
Example 11.3
Consider that a given design requires that a body with mass, m, to slide on an inclined plane that makes a θ angle relative to the horizontal. The body should reach certain acceleration, a, and should exert a normal force on the plane, FN, within the following limits:
Which device is the preferable one? Which one has the smaller information content?
Solution: In the context of this example, Eqs. (11.10) and (11.11) describe the design range and Eqs. (11.12), (11.13), (11.14), (11.15) denote the system ranges of the two devices. Figure 11.4 depicts the vector diagram of the devices.
Equation (11.18) depicts a decoupled design, where a definite order in the fulfillment of the FRs must be followed by virtue of the independence axiom: First, selecting the value of θ determines a, then selecting the value of m, together with the previously chosen value of θ, determines FN. Thus, the total probability of success, ps, is given by
The common range varies between 3 ms−2 and 5 ms−2. So, these are the values for a to be considered for the normal force, FN. An acceleration of 3 ms−2 corresponds to an angle of 17.4º.
The common range varies between 3.42 ms−2 and 5 ms−2. These are the values for a to be considered for the normal force, FN. An acceleration of 5 ms−2 corresponds to an angle of 30º.
Device A has a higher probability of success and consequently the smaller information content. Accordingly, device A is the best alternative solution.
11.4 The Computation of Information Content of Decoupled Designs Through Graphical Methods
The computation of the information content of decoupled designs is a hard task. A graphical method to deal with 2-FR, 2-DP decoupled designs with uniform probability density FRs was developed by Suh (2001, p. 528) and Park (2007, p. 38).
For this case, the random variations of the FRs due to the random variations of the DPs are given by
Figure 11.5 depicts Eqs. (11.20)–(11.22) in the physical domain.
Fig. 11.5
The isogram of a 2-FR, 2-DP decoupled design in the physical domain. (Reproduced from Fradinho et al. (2017), originally published open access under a CC BY 4.0 license: https://doi.org/10.1051/matecconf/201712701004)
The parallelogram [ABCD] of Fig. 11.5 is the system range of the design, while the quadrilateral [EFGH] is the design range and the hexagon [IFJKHL] is the common range. Thus, for the case of uniform pdfs, the information content is given by
The areas of the quadrilateral and of the hexagon can be analytically computed. Those areas can be much more easily evaluated using a 2D CAD system capable of measuring areas of closed polygons.
By the same token, the functional domain of the 2-FR, 2-DP decoupled design of Fig. 11.5 can be depicted in Fig. 11.6, by using Eqs. (11.27)–(11.30).
Fig. 11.6
The isogram of a 2-FR, 2-DP decoupled design in the functional domain
Notice that this graphical method is valid only for uniform pdfs. The method can be extended to 3-FR, 3-DP decoupled designs with uniform pdfs (Fradinho et al. 2017). The random variation of the generic FRs, \( \delta FR_{i} \), due to the random variation of the DPs, \( \delta DP_{i} \), is expressed by
The first three conditions characterize the system range and the last three denote the design range.
The system range is the intersection of three pairs of semi-spaces. The first condition represents two profile planes that are parallel to the lateral projection plane and orthogonal to the \( \delta DP_{1} \) axis; the second one represents two vertical planes that are parallel to \( \delta DP_{3} \) axis and orthogonal to the horizontal projection plane; and the third condition represents two planes that are oblique to the three projection planes. The design range is a rectangular parallelepiped that is centered in the origin.
Similarly, the equations of the design range and of the system range in the functional domain are given by
In the physical domain, the system range is determined by six planes. Figure 11.7 shows the intersections of the six planes with the orthogonal projection planes. The values of \( A_{ij} \), \( \Delta FR_{i} \) and \( \Delta DP_{j} \) were considered as positive in the graphical representation. Thus, the vertical and the oblique planes are opened to the right.
Fig. 11.7
The six planes that determine the system range in the physical domain of a 3-FR, 3-DP decoupled design. (Reproduced from Fradinho et al. (2017), originally published open access under a CC BY 4.0 license: https://doi.org/10.1051/matecconf/201712701004)
Figure 11.8 depicts the resulting geometric solid, which is a six-face polyhedron centered in the origin and composed of three pairs of parallel faces. Four of those faces are defined by the profile planes (\( \pi \) and \( \pi ' \)) and the vertical planes (\( \theta \) and \( \theta ' \)). All these four planes are orthogonal to the horizontal projection plane. The upper and the lower limits of the polyhedron are the oblique planes (\( \alpha \) and \( \alpha ' \)).
Fig. 11.8
The system, the design, and the common ranges in the physical domain of a 3-FR, 3-DP decoupled design. (Reproduced from Fradinho et al. (2017), originally published open access under a CC BY 4.0 license: https://doi.org/10.1051/matecconf/201712701004)
The design range is a quadrangular prism that is also centered in the origin.
The system range is the six-face polyhedron [ABCDA′B′C′D′] with two profile faces ([ADA′D′] and [BCB′C′]), two vertical faces ([ABA′B′] and [CDC′D′]), and two oblique faces ([ABCD] and [A′B′C′D′]).
The design range is the quadrangular prism [EFGHE′F′G′H′] with faces that are parallel to the projection planes.
The common range is the ten-face polyhedron [AA‴II′JJ′KL′C″C′MM′NN′PQ′], which is the intersection of those two solids and is made of five pairs of parallel faces.
The coordinates of all the vertices are easily computed because each one results from the intersection of three known planes.
The probability of success of this design, \( p_{s} \), is given by
$$ p_{s} = \frac{{V_{c} }}{{V_{dp} }} $$
(11.45)
where \( V_{c} \) is the volume of the common range and \( V_{dp} \) is the tolerance volume for the DPs, which is the design range.
Example 11.4
The design depicted in Fig. 11.7 will be used as an example, where the following data is assumed:
Profile planes intersect the \( \delta DP_{1} \) axis at points 2 and (−2);
Vertical planes intersect the \( \delta DP_{1} \) axis at points 3 and (−3) and open 45° to the right;
Oblique planes intersect the \( \delta DP_{1} \) axis at points 4 and (−4) and open 45° to the right;
Thus, the volume of the common range, \( V_{c} \), is the volume of the feasible range represented by the polyhedron [AA‴II′JJ′KL′C″C′MM′NN′PQ′]. This volume can be computed, although very hard to attain. Therefore, a 3D solid modeler software was used to evaluate \( V_{c} \).
$$ V_{c} = 90,31\,\,{\text{volume units}} $$
(11.47)
The volume of the tolerance region for the DPs, \( V_{dp} \), is
Thus, the probability of success and the information content are given by
$$ p_{s} = \frac{90,31}{216,00} \simeq 0,42 $$
(11.49)
$$ I = - \log_{2} p_{s} \simeq 1,26 $$
(11.50)
If \( \Delta DP_{1} \), \( \Delta DP_{2} \), and \( \Delta DP_{3} \) were sufficiently small, then the whole design range would be contained in the system range and the information content would be null.
11.5 Information Content and Robustness
The Information Axiom states that, among designs that conform to independence, the best is the one with the minimum information content. In Sect. 11.2, it was shown that the information content decreases (or the probability of success increases) when the area of the common range increases. The minimum information content can be achieved by moving the median value of the design range to the median value of the system range. This distance is called bias. Thus, a small or null bias should always be preferred. This may be easy for designs that conform to independence because each FR can be tuned through a DP only.
Another way to increase the area of the common range is to extend the design range. Designs that allow large random variations in the DPs with small response deviation are known as robust designs. One of the possible strategies to increase the robustness of design is to identify the limit values of the largest range of the DP that achieves the looked-for functional tolerance range.
The relationship between a FR and the corresponding DP is either already known or may be experimentally determined. Graphically, it can be represented by a line, as shown in Fig. 11.9.
Fig. 11.9
Different design ranges for the same functional tolerance
For a certain ∆FR, (∆DP)1 represents the DP limits for a design, between points A and B, while (∆DP)2 represents the DP limits between points C and D. Since (∆DP)2 is larger than (∆DP)1, then (∆DP)2 corresponds to a more robust design. The most robust design is the one with the smallest absolute value of the average variation rate between the DP limits. In other words, the preferable situation is the one with the smallest slope modulus of the straight line linking the two points of the curve.
Robust designs have a small information content and large capacity to allow DP random variations with small disturbance of their response.
11.6 Summary
This chapter presents the Information Axiom and the meaning of information content. For simple designs it is presented how to make the computation of the information content, and it is shown that it measures the probability of success of the design.
The computation of information content is only possible for designs that conform to independence (uncoupled and decoupled designs). Three simple examples with two FRs were presented.
The computation of the information content of decoupled designs is hard to preform because it involves the use of conditional probability. A graphical method is presented to compute the information content of 2-FR, 2-DP and 3-FR, 3-DP decoupled designs considering uniform probability density for FRs.
Finally, the concept of robust design is discussed, and desirable design ranges withdrawn from the analytical relationships between FRs and DPs are indicated.
Problems
1.
Explain the following expression according to the Information Axiom of Axiomatic Design:
Comment the following statement: “The calculation of the information content of a decoupled design implies the use of conditional probability.”
3.
The following figure shows the probability density function (pdf) of the system range of a certain FR with a uniform distribution. The figure also shows the limits of the design range and of the common range. Explain how the information content for this FR could be computed (Fig. 11.10).
The following figure shows the pdf of a design with one only FR. The figure also shows the design range of three possible solutions (A, B, and C). According to Axiomatic Design theory, which solution is the best one? And the worst? Why? (Fig. 11.11)
Fradinho J, Cavique M, Gabriel-Santos A, Mourão, A, Gonçalves-Coelho A (2017) How to compute the information content of 3-FR, 3-DP decoupled designs with uniform probability density functions for their FRs. In: MATEC web of conferences, vol 127, no. 01004, The 11th International Conference on Axiomatic Design (ICAD 2017). https://doi.org/10.1051/matecconf/201712701004
Gonçalves-Coelho A, Mourão A, Pereira ZL (2005) Improving the use of QFD with axiomatic design. Concur Eng Res Appl 13(3):233–239. https://doi.org/10.1177/1063293X05056787
Fradinho, J., Gonçalves-Coelho, A. (2021). The Information Axiom and Robust Design.
In: Suh, N.P., Cavique, M., Foley, J.T. (eds) Design Engineering and Science. Springer, Cham. https://doi.org/10.1007/978-3-030-49232-8_11