
Abstract
A novel mass-lumping strategy for a mixed finite element approximation of Maxwell’s equations is proposed which on structured orthogonal grids coincides with the spatial discretization of the Yee scheme. The proposed method, however, generalizes naturally to unstructured grids and anisotropic materials and thus yields a natural variational extension of the Yee scheme for these situations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

1 Introduction
We consider the propagation of electromagnetic radiation through a linear non-dispersive and non-conducting medium described by Maxwell’s equations
Here E, H denote the electric and magnetic field intensities and 𝜖, μ are the symmetric and positive definite permittivity and permeability tensors. For ease of notation, we assume that E ×n = 0 on the boundary. The space discretization of (1)–(2) usually leads to finite dimensional differential equations of the form
Due to the particular structure of the system, the stability of such discretization schemes can easily be ensured by the simple algebraic conditions
-
(i)
C′ = C⊤,
-
(ii)
M𝜖, Mμ symmetric and positive definite.
In order to enable an efficient solution of (3)–(4) by explicit time-stepping methods, one additionally has to assume that
-
(iii)
\( \mathrm {M}_\epsilon ^{-1}\), \(\mathrm {M}_\mu ^{-1}\) can be applied efficiently.
The finite difference approximation of (1)–(2) on staggered orthogonal grids yields approximations of the form (3)–(4) satisfying the conditions (i)–(iii) with diagonal matrices M𝜖, Mμ [13]. Moreover, the entries e i, h j in the solution vectors yield second order approximations for the line integrals of E, H along edges of the primal and dual grids [3, 12]. An extension to unstructured grids and anisotropic coefficients is in principle possible, but these approaches rely on the use of two sets of unstructured grids [2, 11] which makes a rigorous convergence analysis rather difficult.
The finite element approximation of (1)–(2) on the other hand yields systems of the form (3)–(4) satisfying conditions (i)–(ii) automatically and a rigorous convergence analysis is possible in rather general situations [7,8,9]. Although the matrices M𝜖 and Mμ are usually sparse, condition (iii) is here in general not valid. The resulting lack of efficiency can however be overcome by appropriate mass-lumping [4, 6], which aims at approximating M𝜖 and Mμ by diagonal or block-diagonal matrices. These approaches are usually based on an enrichment of the approximation spaces and appropriate quadrature; see [3] for details and further references.
In this paper, we present a novel mass-lumping strategy for a mixed finite element approximation of (1)–(2) that yields properties (i)–(iii) without such an increase of the system dimension. We further show that in special cases, i.e., for orthogonal grids and scalar coefficients, the resulting scheme reduces to the staggered-grid finite difference approximation of the Yee scheme.
2 A Mass-Lumped Mixed Finite Element Method
As a preliminary step, we consider a mass-lumped mixed finite element approximation based on enriched approximation spaces and numerical quadrature. We seek for approximations \(\widetilde {\mathbf {E}}_h(t) \in \widetilde V_h\), \(\widetilde {\mathbf {H}}_h(t) \in \widetilde Q_h\) satisfying
for all t > 0. Here, \(\widetilde V_h \subset H_0( \mathop {\mbox{curl}};\varOmega )\) and \(\widetilde Q_h \subset L^2(\varOmega )\) are appropriate finite dimensional subspaces and (a, b)h, (a, b)h,∗ are approximations for usual the scalar product (a, b) =∫Ωa(x) ⋅b(x) dx to be defined below.
In the sequel, we restrict our discussion to problems where E = (E x, E y, 0) and H = (0, 0, H z) with E x, E y, H z independent of z, which allows to represent the fields in two dimensions. The extension to three dimensions will be discussed in Sect. 5.
Let \(\mathcal {T}_h = \{T\}\) be a conforming mesh of Ω consisting of triangles and parallelograms. Any element \(T \in \mathcal {T}_h\) is the image \(F_T(\widehat T)\) of a reference triangle or reference square under an affine mapping \(F_T(\widehat x) = a_T + B_T \widehat x\) with \(a_T \in \mathbb {R}^2\) and \(B_T \in \mathbb {R}^{2 \times 2}\). We denote by h the maximal element diameter and assume uniform shape regularity.
To every element T j, j = 1, …, n T of the mesh, we associate one basis function \(\widetilde \psi _j\) of the space \(\widetilde Q_h\) with \(\widetilde \psi _j|{ }_{T_k} = \delta _{jk}\). For every interior edge e i = T l ∩ T r, i = 1, …, n e of the mesh, we further define two basis functions \(\widetilde \phi _i,\widetilde \phi _{i+n_e}\) which are defined by
on T ∈{T l, T r} and vanish identically on all other elements. Here \(\alpha \in \{1,\ldots ,\widehat n_e\}\) refers to the number of the edge e i on the reference element \(\widehat T\) and γ ∈{0, 1} depends on ℓ and the orientation of the edge e i. The functions \(\widehat \phi _{\alpha ,\gamma }\) are defined in Fig. 1. Similar approximation spaces in three dimensions were utilized in [8, 9]. We further set (a, b)h,∗ = (a, b) and define \((\mathbf {a},\mathbf {b})_h = \sum \nolimits _{T} (\mathbf {a},\mathbf {b})_{h,T}\) with
where \(w_l=1/\widehat n_p\) denote the quadrature weights and \(\widehat x_l\), \(l=1,\ldots ,\widehat n_p\) the quadrature points on the reference element, depicted by dots in Fig. 1.

Degrees of freedom and basis functions for the unit triangle and unit square. The black dots at the vertices represent the quadrature points for the quadrature formula introduced below
Using the bases defined above, all functions in \(\widetilde V_h\) and \(\widetilde Q_h\) can be represented as
This allows to rewrite the variational problem (5)–(6) in algebraic form as
with matrices \((\widetilde {\mathrm {M}}_\epsilon )_{ij} = (\epsilon \widetilde \phi _j,\widetilde \phi _i)_h\), \((\widetilde {\mathrm {M}}_\mu )_{ij} = (\mu \widetilde \psi _j,\widetilde \psi _i)\), and \((\widetilde {\mathrm {C}})_{ij}=( \mathop {\mbox{curl}} \widetilde \phi _j,\widetilde \psi _i)\). As a direct consequence of the particular choice of the basis functions, we obtain
Lemma 1
Let \(\widetilde {\mathrm {M}}_\epsilon \), \(\widetilde {\mathrm {M}}_\mu \), and \(\widetilde {\mathrm {C}}\)be defined as above. Then conditions (i)–(iii) hold.
Proof
The properties (i)–(ii) follow directly from the definition of the matrices and the symmetric positive definiteness of the material tensors. Since the basis functions for \(\widetilde Q_h\) are supported only on single elements, one can see that \(\widetilde {\mathrm {M}}_\mu \) is diagonal. To see the block-diagonal structure of \(\widetilde {\mathrm {M}}_\epsilon \), let us refer to Fig. 2. In the left plot, the degrees of freedom for \(\widetilde V_h\) are depicted by the red arrows and the quadrature points by blue circles. By definition, the corresponding basis functions are zero in all vertices, except the one which the arrow representing the corresponding degree of freedom originates from. Together with the nodal quadrature formula, this reveals that only groups of basis functions associated with same vertex yield non-zero contributions to the mass matrix \(\widetilde {\mathrm {M}}_\epsilon \). In the right plot of Fig. 2, we depict the structure of the inverse of \(\widetilde {\mathrm {M}}_\epsilon ^{-1}\). Each block here corresponds to the degrees of freedom associated to one of the vertices in the mesh and the size of the block is determined by the number of edges incident to the corresponding vertex. Note that an appropriate numbering of the degrees of freedom is required to see the block diagonal structure so clearly. □

Location of degrees of freedom for the basis function of the space \(\widetilde V_h\) (left), and structure of the matrix \(\widetilde {\mathrm {M}}_\epsilon ^{-1}\) after appropriate numbering of degrees of freedom (right)
Let us mention that the quadrature rule satisfies (a, b)h,T =∫Ta(x) ⋅b(x) dx when a(x) ⋅b(x) is affine linear. This ensures that the method (5)–(6) also has good approximation properties. By a slight adoption of the results given in [5], we obtain
Lemma 2
LetE, Hbe a smooth solution of (1)–(2) and let \(\widetilde {\mathbf {E}}_h(0)\)and \(\widetilde {\mathbf {H}}_h(0)\)be chosen appropriately. Then
for all 0 ≤ t ≤ T with C = C(E, H, T). Moreover, \(\|\widetilde {\mathbf {H}}_h(t) - \pi _h^0 \mathbf {H}(t)\|{ }_{L^2(\varOmega )} \le C h^2\)where \(\pi _h^0 \mathbf {H}\)denotes the piecewise constant approximation ofHon the mesh \(\mathcal {T}_h\).
Remark 1
For structured meshes and isotropic coefficients, one can observe second order convergence also for line integrals of the electric field along edges of the mesh. Second convergence for the electric field can also be obtained for unstructured meshes by a non-local post-processing strategy; see [5] for details.
3 A Variational Extension of the Yee Scheme
The method of the previous section already yields a stable and efficient approximation. We now show that one degree of freedom per edge can be saved without sacrificing the accuracy or efficiency of the method. To this end, we construct approximations E h(t) ∈ V h, H h(t) ∈ Q h in spaces \(V_h \subset \widetilde V_h\) and \(Q_h = \widetilde Q_h\).
We again define one basis function ψ j of Q h for every element T k by \(\psi _j|{ }_{T_k}=\delta _{jk}\). To any edge e i = T l ∩ T r, we now associate one single basis function ϕ i defined by
Using the construction of \(\widetilde \phi _i\), one can give an equivalent definition of ϕ i via
with basis functions \(\widehat \phi _\alpha =\widehat \phi _{\alpha ,0} + \widehat \phi _{\alpha ,1}\) defined on the reference element in Fig. 3. Note that the space V h coincides with the Nedelec space of lowest order [1, 10]. Any function E h ∈ V h and H h ∈ Q h can now be expanded as

Degrees of freedom and basis functions on the unit triangle and unit square
As a consequence of (12), any E h ∈ V h can be interpreted as function \(\widetilde {\mathbf {E}}_h \in \widetilde V_h\) by
The coordinates of \(\widetilde {\mathbf {E}}_h\) and E h are thus simply connected by \(\widetilde {\mathbf {e}}_i =\widetilde {\mathbf {e}}_{i+n_e}={\mathbf {e}}_i\). Vice versa, we can associate to any function \(\widetilde {\mathbf {E}}_h \in \widetilde V_h\) a function \({\mathbf {E}}_h = \varPi _h \widetilde {\mathbf {E}}_h \in V_h\) by defining its coordinates as \({\mathbf {e}}_i = \frac {1}{2}(\widetilde {\mathbf {e}}_i + \widetilde {\mathbf {e}}_{i+n_e})\). In linear algebra notation, this reads
with projection matrix P defined by \(\mathrm {P}_{ij}=\frac {1}{2}\) if j = i or j = i + n e, and Pij = 0 else.
We now define system matrices for the system (3)–(4) by (Mμ)ij = (μψ j, ψ i), \(\mathrm {C}_{ij}=\mathrm {C}^{\prime }_{ji}=( \mathop {\mbox{curl}} \phi _j,\psi _i)\), and \(\mathrm {M}_\epsilon ^{-1} = \mathrm {P}\,\widetilde {\mathrm {M}}_\epsilon ^{-1} \mathrm {P}^\top \), where \(\widetilde {\mathrm {M}}_\epsilon \) is defined as in the previous sections. This construction has the following properties.
Lemma 3
Let Mμ, C, C′, and \(\mathrm {M}_\epsilon ^{-1}\)be defined as above, and set \(\mathrm {M}_\epsilon = (\mathrm {M}_\epsilon ^{-1})^{-1}\). Then the conditions (i)–(iii) are satisfied.
Proof
Condition (i) follows by construction. The matrix Mμ is diagonal and positive definite and therefore \(\mathrm {M}_\mu ^{-1}\) has the same properties. This verifies (ii) and (iii) for the matrix Mμ. Since P is sparse and has fully rank and \(\widetilde {\mathrm {M}}_\epsilon ^{-1}\) is block diagonal, symmetric, and positive definite, one can see that also \(\mathrm {M}_\epsilon ^{-1}\) is sparse, symmetric, and positive-definite. This verifies conditions (ii) and (iii) for M𝜖. □
In the following, we investigate more closely the relation of the system (3)–(4) with matrices as defined above and the system (10)–(11) discussed in the previous section. We start with an auxiliary result.
Lemma 4
Let C, P, and \(\widetilde {\mathrm {C}}\)be defined as above. Then one has \(\widetilde {\mathrm {C}} =\mathrm {C} \mathrm {P}\).
Proof
The result follows directly from the construction. □
As a direct consequence, we can reveal the following close connection between the methods (3)–(4) and (10)–(11) discussed in the preceding sections.
Lemma 5
Let \(\widetilde {\mathbf {e}}(t)\), \(\widetilde {\mathbf {h}}(t)\)be a solution of (10)–(11). Then \(\mathbf {e}(t) = \mathrm {P}\,\widetilde {\mathbf {e}}(t)\), \(\mathbf {h}(t) = \widetilde {\mathbf {h}}(t)\)solves (3)–(4) with matrices M𝜖, Mμ, and C as defined above.
Proof
From Eq. (10), the definition of e, h, and Lemma 4, we deduce that
This verifies the validity of Eq. (3). Using Eq. (11), we obtain
which verifies the validity of Eq. (4). Finally, using the discrete stability of the projection completes the proof. □
Remark 2
The vectors e(t), h(t) computed via (3)–(4) with the above choice of matrices correspond to finite element approximations E h(t) ∈ V h, H h(t) ∈ Q h. Therefore, the procedure described above can be interpreted as a mixed finite element method with mass-lumping based on the approximation spaces V h and Q h.
As an immediate consequence of Lemma 5 and the approximation results of Lemma 2, we now obtain the following assertions.
Lemma 6
Lete(t), h(t) denote the solutions of (3)–(4) with appropriate initial conditions and setE h(t) =∑ie i(t)ϕ i, H h(t) =∑jh j(t)ψ j. Then
for all 0 < t ≤ T. In addition, \(\|\pi _h^0 \mathbf {H}(t) - {\mathbf {H}}_h(t)\|{ }_{L^2(\varOmega )} \le C h^2\)where \(\pi _h^0 \mathbf {H}\)denotes the piecewise constant approximation ofHon the mesh \(\mathcal {T}_h\).
By some elementary computations, one can verify the following observation.
Lemma 7
Let \(\mathcal {T}_h\)be a uniform mesh consisting of orthogonal quadrilaterals T of the same size. Furthermore, let 𝜖 and μ be positive constants. Then the matrices M𝜖, Mμ, and C, defined above coincide with those obtained by the finite difference approximation on staggered grids; see [ 3] for the two dimensional version.
The method proposed in this section therefore can be understood as a variational extension of the Yee scheme in the sense of [3]. In the two dimensional setting, one degree of freedom e i is required for every edge, and one value h j for every element.
4 Numerical Validation
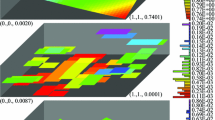
Consider the domain Ω = (−1, 1)2 ∖{(x, y) : (x − 0.6)2 + y 2 ≤ 0.252}, which is split by an interior boundary into Ω = Ω 1 ∪ Ω 2; see Fig. 4 for a sketch. We set 𝜖 = 1 on Ω 1, 𝜖 = 3 on Ω 2 and μ = 1 on Ω, and consider a plane wave that enters the domain from the left boundary. The wave gets slowed down and refracted, when entering the domain Ω 2, and reflected at the circle ∂Ω 0, where we enforce a perfect electric boundary conditions. For the spatial discretization, we choose the method presented in Sect. 3, while for the time discretization, we choose the leap-frog scheme. A very small time step is chosen to suppress the additional errors due to time discretization. Convergence rates for the numerical solution are depicted in table of Fig. 5 and a few snapshots of the solution are depicted Fig. 6. The error is measured in the norm \(|\!|\!| e|\!|\!|:=\max _{0 \le t^n \le T} \|e(t^n)\|{ }_{L^2(\varOmega )}\).

Geometry

Errors and estimated order of convergence (eoc) with respect to a fine solution \(({\mathbf {E}}_{h^*},{\mathbf {H}}_{h^*})\) for h ∗ = 2−8. The total number of degrees of freedom (DOF) is also given

Snapshots of the magnetic field intensity H h for time t = 0.8, 1.2, 1.6, 2.4, 2.8
5 Discussion
Before we conclude, let us briefly discuss an alternative formulation and the extension to three dimensions and higher order approximations.
Remark 3
Eliminating h from (3)–(4) leads to a second order equation
for the electric field vector e alone, with \(\mathrm {K}_{\mu ^{-1}} = C' \mathrm {M}_{\mu }^{-1} \mathrm {C}\). A sufficient condition for the stability of the scheme (17) is
-
(iv)
M𝜖 and \(\mathrm {K}_{\mu ^{-1}}\) are symmetric and positive definite, respectively, semi-definite,
and for an efficient numerical integration of (17), one now requires that
-
(v)
\(\quad \mathrm {M}_\epsilon ^{-1}\) and \(\mathrm {K}_{\mu ^{-1}}\) can be applied efficiently.
The conditions (iv) and (v) can be seen to be a direct consequence of the conditions (i)–(iii), and the special form \(\mathrm {K}_{\mu ^{-1}} = \mathrm {C}' \mathrm {M}_\mu ^{-1} \mathrm {C}\) of the matrix \(\mathrm {K}_{\mu ^{-1}}\).
Remark 4
Using the definition of the matrices Mμ, C, and C′ = C⊤ given in the previous section, one can verify that \(\mathrm {K}_{\mu ^{-1}}\) is given by \((\mathrm {K}_{\mu ^{-1}})_{ij} = (\mu ^{-1} \mathop {\mbox{curl}} \phi _j, \mathop {\mbox{curl}} \phi _i)\). Thus \(\mathrm {K}_{\mu ^{-1}}\) can be assembled without constructing C or Mμ explicitly. Moreover, the conditions (iv) and (v) for \(\mathrm {K}_{\mu ^{-1}}\) are satisfied automatically. The essential ingredient for a mass-lumped mixed finite element approximation of (1)–(2) thus is the construction of a positive definite and sparse matrix \(\mathrm {M}_\epsilon ^{-1}\).
Remark 5
The construction of the approximation M𝜖 discussed in Sect. 3 immediately generalizes to three space dimensions. Like in the two dimensional case, two basis functions \(\widetilde \phi _i\), \(\widetilde \phi _{i+n_e}\) of the space \(\widetilde V_h\) are defined for every edge e i of the mesh [9, 10] and the approximation (⋅, ⋅)h is defined via numerical quadrature by the vertex rule. The lumped mass matrix given by \((\widetilde {\mathrm {M}}_\epsilon )_{ij}=(\epsilon \widetilde \phi _j, \widetilde \phi _i)_h\) then is again block-diagonal. As before, the basis functions for the space V h are then defined by \(\phi _i = \widetilde \phi _i + \widetilde \phi _{i+n_e}\) and the inverse mass matrix for the reduced space is again given by \(\mathrm {M}_\epsilon ^{-1} = \mathrm {P}\,\widetilde {\mathrm {M}}_\epsilon ^{-1} \mathrm {P}^\top \) with projection matrix P of the same form as in two dimensions.
References
Boffi, D., Brezzi, F., Fortin, M.: Mixed Finite Element Methods and Applications. Springer Series in Computational Mathematics, vol. 44. Springer, Heidelberg (2013)
Codecasa, L., Politi, M.: Explicit, consistent, and conditionally stable extension of FD-TD to tetrahedral grids by FIT. IEEE Trans. Magn. 44, 1258–1261 (2008)
Cohen, G.: Higher-Order Numerical Methods for Transient Wave Equations. Springer, Heidelberg (2002)
Cohen, G., Monk, P.: Gauss point mass lumping schemes for Maxwell’s equations. Numer. Methods Partial Diff. Equat. 14, 63–88 (1998)
Egger, H., Radu, B.: A mass-lumped mixed finite element method for acoustic wave propagation (2018). arXive:1803.04238
Elmkies, A., Joly, P.: éléments finis d’arête et condensation de masse pour les équations de Maxwell: le cas de dimension 3. C. R. Acad. Sci. Paris Sér. I Math. 325, 1217–1222 (1997)
Joly, P.: Variational methods for time-dependent wave propagation problems. In: Topics in Computational Wave Propagation, LNCSE, vol. 31, pp. 201–264. Springer, Berlin (2003)
Monk, P.: Analysis of a finite element methods for Maxwell’s equations. SIAM J. Numer. Anal. 29, 714–729 (1992)
Mur, G., de Hoop, A.T.: A finite-element method for computing three-dimensional electromagnetic fields in inhomogeneous media. IEEE Trans. Magn. 21(6), 2188–2191 (1985)
Nedelec, J.C. : Mixed finite elements in \(\mathbb {R}^3\). Numer. Math. 35(6), 315–341 (1980)
Schuhmann, R., Weiland, T.: A stable interpolation technique for FDTD on non-orthogonal grids. Int. J. Numer. Model. 11, 299–306 (1998)
Weiland, T.: Time domain electromagnetic field computation with finite difference methods. Int. J. Numer. Model. 9, 295–319 (1996)
Yee, K.: Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. AP-16, 302–307 (1966)
Acknowledgements
The authors are grateful for support by the German Research Foundation (DFG) via grants TRR 146, TRR 154, and Eg-331/1-1 and through grant GSC 233 of the “Excellence Initiative” of the German Federal and State Governments.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Egger, H., Radu, B. (2020). A Mass-Lumped Mixed Finite Element Method for Maxwell’s Equations. In: Nicosia, G., Romano, V. (eds) Scientific Computing in Electrical Engineering. SCEE 2018. Mathematics in Industry(), vol 32. Springer, Cham. https://doi.org/10.1007/978-3-030-44101-2_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-44101-2_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-44100-5
Online ISBN: 978-3-030-44101-2
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)