
Abstract
Car driving is a complex activity, consisting of an integrated multi-task behavior and requiring different interrelated skills. Over the last years, the number of Advanced Driver Assistance systems integrated into cars has grown exponentially. So it is very important to evaluate the interaction between these devices and drivers in order to study if they can represent an additional source of driving-related distraction. In this study, 22 subjects have been involved in a real driving experiment, aimed to investigate the effect of the use of the Adaptive Cruise Control (ACC) on mental workload and Perception-Reaction Time of the drivers. During the test physiological data, in terms of brain activity through Electroencephalographic technique and eye gaze through Eye-Tracking devices, and vehicle trajectory data, through a satellite device mounted on the car, have been recorded. The results obtained show that the use of ACC caused an increase in mental workload and Perception-Reaction Time of the drivers.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Electroencephalography
- Eye-Tracking
- Mental workload
- Human factor
- Car driving
- Road safety
- Adaptive Cruise Control
- Perception-Reaction Time
1 Introduction
The Global status report on road safety 2018, launched by the World Health Organization (WHO), highlights that the number of annual road traffic deaths has reached 1.35 million. Road traffic injuries may now be considered as the leading causes of death among people aged 5–29 years [1]. Car driving is a complex activity, consisting in an integrated multi-task behavior engaging several processes and requiring different interrelated skills that rely on interconnected visual, motor and cognitive brain systems [2]. While driving, the interactions between the driver, the vehicle and the environment are continuous and numerous [3, 4]. Driver’s common errors are largely correlated to overload, distractions, tiredness, or the simultaneous realization of other activities while driving. Secondary task distraction is a contributing factor in up to 23% of crashes and near-crashes [5, 6]. Considering the driver’s error resulting in severe consequences in road transportations, the development of countermeasures to mitigate the human errors through training and technology and a better road system becomes critical [7]. Advanced driver assistance systems (ADAS) and Passive Safety Systems (PSS) (e.g. seatbelts, airbags) are two approaches used in modern vehicles to mitigate the risk of accidents or casualties resulting from human error. ADAS are electronic control systems that aid drivers while driving. They are designed to improve driver, passenger and pedestrian safety by reducing both the severity and the overall number of motor vehicle accidents. ADAS can warn drivers of potential dangers, intervene to help the driver remain in control in order to prevent an accident and, if necessary, reduce the severity of an accident in case if it cannot be avoided. Adaptive cruise control (ACC) is an ADAS that automatically adjusts the vehicle speed to maintain a safe distance from vehicles ahead. A vehicle equipped with ACC will thus reduce speed automatically, within limits, to match the speed of a slower vehicle that is following. ACC automates the operational control of headway and speed. It should reduce driver stress and human errors as a result of freeing up visual, cognitive and physical resources [8], and the number of hard accelerations and decelerations, encourage speed harmonization between vehicles and enable better merging behaviors [9].
Despite the potential benefits of ACC, negative behavioral adaptation (BA) may occur with its introduction [10]. Driver may use any freed visual, cognitive and physical resources to engage in non-driving tasks that he perceives as improving his productivity. However, these tasks may reduce his vigilance and attention to the primary driving task, which could result in driver distraction, and a failure to detect and respond to critical driving situations [11, 12]. When using ACC, drivers are more likely to perform in-vehicle tasks that they would not normally do [13], and their performance on a secondary task improves [14]. The visual demand of drivers decreases when they use ACC, allowing them to pay less attention the road ahead [15]. The main objective of this study was to investigate whether ACC can induce BA in drivers. 22 subjects have been involved in a real driving experiment, aimed to investigate the effect of the use of the Adaptive Cruise Control (ACC) on mental workload and Perception-Reaction Time of the drivers. Several neurophysiological studies about drivers’ behaviors, in fact, have shown that the same experimental tasks are perceived differently, in terms of mental workload, if performed in a simulator or in a real environment [16]. Pierre et al. and Tong et al., moreover, have confirmed that not only the task perception, but also the driver behavior itself related to a specific condition, could change if the same condition is reproduced in simulators or in a real scenario [17, 18]. Therefore, the first key aspect of the present work is the real urban context employed to perform the experiments.
During the experiments, different parameters have been monitored:
-
the drivers’ mental workload, through objective measure by EEG technique and subjective measure through the NASA Task Load Index (NASA-TLX) questionnaire;
-
the drivers’ Perception-Reaction Time, through Eye-Tracking (ET) device;
-
the vehicle trajectory and velocity, using a GPS device mounted on the car.
Electroencephalographic technique (EEG) has been demonstrated to be one of the techniques to infer, in real time, the mental workload experienced by the user, since it is a direct measure of brain activations and it is characterized by high temporal resolution, limited cost and invasiveness [19,20,21]. Also, it provides direct access to what is happening within human mind, thus providing objective assessment of cognitive phenomena [22]. Numerous research papers have demonstrated that braking behaviour and Perception-Reaction Time are useful indicators of the amount of attention a driver is allocating to the driving task. Especially for ACC, if drivers devote more resources to non-driving tasks when using ACC, they may show an impaired ability to respond to safety-relevant driving situations that require them to apply the brakes themselves (such as a lead vehicle braking suddenly or an ACC system failure). In response to a braking lead vehicle, drivers begin braking later when using ACC showing higher Perception-Reaction Time [15, 23]. In this paper, 22 subjects have been involved in a real driving experiment performed along the Tangenziale of Bologna (Italy). Each subject, after a proper experimental briefing, had to repeat the circuit two times within the same day and, during the second lap, three different events with both ACC enabled and disabled (respectively ON and Off conditions) have been acted, by involving a confederate vehicle along the route.
2 Methods
2.1 Sample
Twenty-two males drivers (mean age = 47.12 years ± 5.58, range: 35 ÷ 55) took part in the study. They were selected in order to have a homogeneous experimental group in terms of age, sex and driving expertise. Everyone had normal vision and none of them wore eyeglasses or lenses, to avoid artefacts in eye-movement monitoring. They were paid and they did not know anything about the aims of the study in order to avoid any bias of their behavior. They only knew that the study aimed to test the mobile eye-recording device while driving. All subjects had a Category B driving license (for cars). None of them had previously driven on the road segment considered in this study.
Subjects had previously experience in driving a vehicle with automatic transmission and Adaptive Cruise Control (mean number of hours of experience with ACC = 3.31 years ± 1.81, range: 1 ÷ 5).
The experiment was conducted following the principles outlined in the Declaration of Helsinki of 1975, as revised in 2000. The study was approved by the Ethic Committee of University of Bologna. Informed consent and authorization to use the video graphical material were obtained from each subject on paper, after the explanation of the study.
2.2 Experimental Site
The subjects had to drive along the Tangenziale of Bologna (Italy), a bypass road, coplanar with the urban section of the A14 highway. It is a primary road, mainly straight with wide radius curves, with two lanes in each direction (excluding the emergency lane), with intersections at ground level only in correspondence with the junctions. This road has been chosen because it has right requirements for the application of the Adaptive Cruise Control as it allows speed higher than 60 km/h and it has a multi-lane carriageway in each direction with a horizontal signs in a god maintenance state.
Moreover, the route consisted in two laps of a “circuit” about 10 km long (Fig. 1).

The circuit of the real driving experiment.
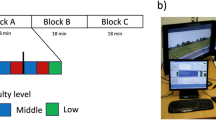
Each subject, after a proper experimental briefing, had to repeat the circuit two times within the same day. The first lap was considered as an “adaptation lap”, because it was useful for the driver adaptation to the route, the vehicle and to the ACC system. During this lap the driver was free to experience the ACC system. The data recorded during the second lap were taken into account for the analysis. During this lap, the user drove half of the track with ACC enabled (ON condition) and other half with ACC disabled (OFF condition). The order of ACC on and off conditions had been randomized among the subjects, in order to avoid any order effect. The same car was used for the experiments, i.e. a Volkswagen Touareg, with diesel engine and automatic transmission. It was equipped with Adaptive Cruise Control (ACC). Finally, during the test lap (the 2nd one) three similar events for both ACC on and off conditions were simulated, by involving a confederate vehicle along the route: a car entering the traffic flow ahead of the experimental subject and braking in order to simulate a critical event (Fig. 2). The event type was selected as the most probable one coherently with the ACC mode of operation, as well as the safest to be acted, without introducing any risk for the actors, for the experimental subjects and for the traffic in general.

Simulation of the events.
2.3 Procedure and Measurements
Subjects drove a route of 5 km + 5 km from along the Tangenziale of Bologna. They did not know the route in advance and they were given instructions about how and when to come back. Data collection started at 9 a.m. and finished at 18 p.m. on two different days, always in autumn, in a period with good meteorological conditions. All the subjects drove the same car. The vehicle was equipped with a Video Vbox Pro data recorder (Fig. 3). Two cameras and a GPS antenna were placed on the top of the car and connected to the Vbox data recorder. The complete driver’s scene was recorded, including synchronized data on acceleration, speed and GPS coordinates. The system recorded speed (accuracy: 0.1 km/h), acceleration (1% accuracy), and distance with a 20 Hz sample rate. In order to evaluate the drivers’ Perception-Reaction Times, an ASL Mobile Eye-XG device recorded the driver’s eye movements (Fig. 3). The device consisted of two cameras attached to eyeglasses, one recording the right eye movements, and the second one recording the visual scene. In order not to obscure the normal field of view of the drivers, a mirror capable of reflecting the infrared light was installed in the eye camera recording the activity of the right eye. As already tested in Costa et al., the sampling rate for the eye-movement recording was 30 Hz with an accuracy of 0.5–1° (approximating the angular width of the fovea) [24,25,26].

ASL Mobile Eye-XG device, Video Vbox Pro data recorder and the driver inside the car during the test.
A video for each subject was created using the ASL software with a cross superimposed to the scene showing the eye fixations. This allows researchers to detect the sequence of points of the scene fixated by the driver (Fig. 4).

Video created using the ASL software with a cross superimposed to the scene showing the eye fixations. In the left figure the vehicle was seen, in the right one it was not seen.
In order to get a good accuracy of the eye-movement recorder, a calibration procedure was carried out for each subject according to his eye status. The ASL Mobile Eye-XG and the Video VBOX PRO devices were installed in the back seat of the car, monitored by one of the researchers, who were asked not to talk to the driver, with apart from giving instructions about the direction and assistance in case of necessity. In order to evaluate the drivers’ mental workload, subjective and objective measures, respectively through the EEG technique and the NASA Task Load Index (NASA-TLX) questionnaire, were adopted. In fact, it is widely accepted in scientific literature the limit of using subjective measures alone, such as questionnaires and interview, because of their intrinsic subjective nature and the impossibility to catch the “unconscious” phenomena behind human behaviors [22, 27]. The EEG signals have been recorded using the digital monitoring BEmicro system (EBNeuro, Italy). Twelve EEG channels (FPz, AF3, AF4, F3, Fz, F4, P3, P7, Pz, P4, P8 and POz), placed according to the 10–20 International System, were collected with a sampling frequency of 256 Hz, all referenced to both the earlobes, grounded to the Cz site, and with the impedances kept below 20 kΩ. The EEG data have been used to assess the mental workload of each driver through an innovative machine-learning algorithm developed [28] and validated in a previous driving study [5]. In addition, subjective measures of perceived mental workload have been collected from the subjects after both the tasks through the NASA Task Load indeX (NASA-TLX) questionnaire [5].
2.4 Data Analysis
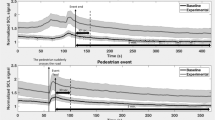
For each braking event performed during the test lap (the 2nd one), for both ACC on and off conditions, EEG-based mental workload assessment and Perception-Reaction Time of the drivers were analyzed. The average value for each condition (ACC on and ACC off) was taken into consideration. The acquired EEG signals were digitally band-pass filtered by a 5th order Butterworth filter [1 ÷ 30 Hz]. The eyeblink artifacts were removed from the EEG using the REBLINCA method [29]. The EEG signal from the remaining eleven electrodes was then segmented in 2 second-epochs, shifted of 0.125 s, with the aim to have both a high number of observations in comparison with the number of variables, and to respect the condition of stationarity of the EEG signal [30]. For other sources of artifacts, specific procedures of the EEGLAB toolbox were applied, in order to remove EEG epochs marked as “artifact”. The Power Spectral Density (PSD) has then been estimated by using the Fast Fourier Transform (FFT) in the EEG frequency bands defined for each subject by the estimation of the Individual Alpha Frequency (IAF) value [31]. In this regard, before starting with the experiment, the brain activity of each subject during a minute of rest (closed eyes) was recorded, in order to calculate the IAF. Thus, the Theta rhythms [IAF−6 ÷ IAF−2] over the Frontal sites and the Alpha rhythms [IAF−2 ÷ IAF+2] over the Parietal sites were investigated, because of their strict relationship with mental workload [32], and used to compute the mental Workload index (WL index). As introduced before, the WL index was calculated by using the machine learning approach proposed by Aricò and colleagues [28], the automatic stop-StepWise Linear Discriminant Analysis (asSWLDA) classifier. The time resolution of the provided WL index has been fixed at 8 s, since this value has been demonstrated to be a good trade-off between the resolution and the accuracy of the measure [19]. The Perception-Reaction Time (PRT), as defined by Olson and Sivak, is “the time from the first sighting of an obstacle until the driver applies the brakes” [33, 34]. It has been evaluated as the difference between the Reaction time and the Perception time.
The Perception Time is the time when the driver sees the braking of the confederate vehicle. The Reaction Time, instead, is the time when the driver starts to brake his vehicle. In order to calculate PRT value for each critical event performed during the test lap, the Video Vbox Pro data recorder and the ASL Mobile Eye-XG device were synchronized. The synchronization of the speed data and the eye-tracking data was obtained by the methodology used in Costa, Bonetti et al., Costa, Bichicchi et al. and in Costa, Simone et al. [35,36,37,38]. The Reaction Time was evaluated by Video Vbox-Pro output video, as the time in which the driver starts to brake, after having looked at the stop light of confederate vehicle (Fig. 5). The Perception Time was evaluated by ASL Mobile Eye-XG device, as the frame in which the confederate vehicle braked, its led stop became red and the driver saw the stop light. This represents the time of the first-fixation of the red stop light of the confederate vehicle (Fig. 5).

First-fixation of the red led stop of the confederate vehicle and time of breaking. (Color figure online)
In Fig. 6 it was possible to highlight the range, corresponding to the Perception-Reaction Time of one braking event.

Evaluation of the Perception-Reaction Time.
In order to evaluate the Perception Time, the ASL Mobile Eye-XG videos were analyzed frame-by-frame. To avoid the inclusion of saccadic movements, an element was considered as fixated when it was fixed for a minimum duration of two frames (66 ms). The threshold of 66 ms, which is low in comparison to a common filtering of 100 ms or higher usually found in eye-tracking studies, was dictated by the specific setting of this study that involved the recording of eye movements while driving. Lantieri et al. and Vignali et al. reported that in real traffic situations, in a high dynamical context of road driving, the duration of fixation is much lower than in other contexts and experimental settings. In a real driving setting with a dynamical visual scene, as in the case of the present study, rapid fixations may occur [39,40,41]. Also, at the end of task the subjects had to evaluate the experienced workload by filling the NASA-TLX questionnaire. Each subject has filled two questionnaires: one for the half of the track with ACC enabled (ON condition) and other half with ACC disabled (OFF condition). In particular, the subject had to assess, on a scale from 0 to 100, the impact of six different factors (i.e. Mental demand, Physical demand, Temporal demand, Performance, Effort, Frustration) and the final result of this questionnaire is a score from 0 to 100 corresponding to the driver’s mental workload perception.
3 Results
The analysis of Perception-Reaction Time results, as reported in Fig. 7, showed that during the driving with ACC the mean value of PRT was equal to 3.95 ± 1.92 s, while without ACC it was equal to 2.86 ± 1.02 s. The paired t-test revealed that such a difference was statistically significant (p = 0.023).

Mean and standard deviation of PRT for ACC ON and OFF conditions. The paired t-test revealed a significant Perception-Reaction Time variation (p = 0.023). (Color figure online)
The mean Perception-Reaction Time of the drivers with ACC (blue bar) was higher than without ACC (red bar).
In addition, the paired t-test between the WL indexes during the two conditions showed that the WL indexes during the ACC ON driving were slightly higher (p = 0.015) than those during the ACC OFF one (Fig. 8). With ACC the mean value of WL index was equal to 3.22 ± 1.71, whilst without ACC it was equal to 3.04 ± 1.28.

Mean and standard deviation of WL index for ACC ON and OFF conditions. The paired t-test revealed a significant WL index variation (p = 0.015).
Adaptive Cruise Control caused distraction in the drivers, who exhibited longer PRT times and higher workload. On the contrary, when they knew that they could not rely on the system, they had complete control of the vehicle and they paid more attention to the driving scene, with a consequent Perception-Reaction Time decrease. In response to a braking lead vehicle, drivers started braking later when using ACC. Drivers rate driving with ACC was less effortful when driving without ACC. If PRT is shorter, the driver has a greater probability to be able to stop the vehicle safely with a great improvement in terms of road safety. Figure 9 showed the results in terms of NASA-TLX scores, revealing that there is significant difference in terms of subjective workload between the ACC on and off conditions. During the driving with ACC the mean value of the subjective workload was equal to 29 ± 5.74, while without ACC it was equal to 37.81 ± 2.17. There were higher effort and physical demand in the manual condition compared to the ACC condition.

Mean and standard deviation of NASA-TLX scores for ACC ON and OFF conditions.
The ACC system certainly seemed to fulfil its role as a comfort and convenience device, as it reduced drivers’ subjective workload when compared to manual driving. Drivers believed they had maintained a high level of attention during the test dealing with dangerous situations promptly.
This, actually, led to increased distraction and higher Perception – Reaction Times with ACC. Subjects reacted more slowly to a safety-relevant brake light detection task, and responded within an unsafe time when using ACC.
4 Discussion and Conclusions
The Advanced Driver-Assistance Systems (ADAS) positively influence the factors concerning road safety, but they also have effects on the behavior of drivers. In this paper, an experimental test has been carried out in order to evaluate if the use of the Adaptive Cruise Control system could influence the Perception-Reaction Times and mental workload of drivers. The results obtained demonstrated the reliability and effectiveness of the proposed methodology based on human EEG signals, to objectively measure driver’s mental workload, and on Mobile Eye-XG device, to evaluate the Perception-Reaction times of drivers. The proposed approach should allow investigating the relationship between human mental behavior, performance and road safety. The results achieved showed that the mean Perception-Reaction Time and the mean mental workload with ACC were higher than without ACC. Results from this study demonstrate that ACC system induced behavioral adaptation in drivers, in terms of changes in workload and hazard detection. Subjects reacted more slowly to a safety-relevant brake task, when using ACC. When the Adaptive Cruise Control was active, it caused distraction in the drivers who exhibited long reaction times. NASA-TLX questionnaire, however, showed there was higher subjective workload in the manual condition compared to the ACC condition. These data are even more significant considering that subjects wore eye tracking glasses and EEG cap, drove an unfamiliar car and knew that their driving behavior was being studied. One may assume that their driving style was more careful than under real-life conditions. From a larger point of view, the present study also demonstrated how such a multimodal evaluation, integrating traditional measures (e.g. car parameters) with innovative methodologies (i.e. neurophysiological measures such as EEG and ET), could provide new and more objective insights. Actually, contrarily to the self-perception, to drive with ACC ON produced higher workload, probably because the drivers were distracted other actions within the car. Therefore, the higher workload could be considered as an indirect effect of ADAS systems, since actually the mere action of driving is perceived as easier by the drivers. However, this results in larger PRT values and therefore in risky behaviors. This preliminary study paves the way to the application of these methodologies to evaluate in real conditions human behavior related to road safety, also considering the recent technological advancements that are making this instrumentation less invasive and easier to use [42, 43]. Further studies are encouraged in order to enlarge experimental sample as well as to treat also other kinds of events as well as ADAS technologies.
References
World Health Organization: Global Status Report on Road Safety 2018
Graydon, F.X., et al.: Visual event detection during simulated driving: identifying the neural correlates with functional neuroimaging. Transp. Res. Part F Traffic Psychol. Behav. 7, 271–286 (2004)
Bucchi, A., Sangiorgi, C., Vignali, V.: Traffic psychology and driver behavior. Procedia Soc. Behav. Sci. 53, 972–979 (2012)
Dondi, G., Simone, A., Lantieri, C., Vignali, V.: Bike lane design: the Context Sensitive Approach. Procedia Eng. 21, 897–906 (2011)
Di Flumeri, G., et al.: EEG-based mental workload neurometric to evaluate the impact of different traffic and road conditions in real driving settings. Front. Hum. Neurosci. 12, 509 (2018)
Fan, J., Smith, A.P.: The impact of workload and fatigue on performance. In: Longo, L., Leva, M.C. (eds.) H-WORKLOAD 2017. CCIS, vol. 726, pp. 90–105. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-61061-0_6
Salmon, P.M., Young, K.L., Lenné, M.G., Williamson, A., Tomesevic, N., Rudin-Brown, C.M.: To err (on the road) is human? An on-road study of driver errors. In: Proceedings of the Australasian Road Safety Research, Policing and Education Conference, Canberra (2010)
Stanton, N.A., Marsden, P.: From fly-by-wire to drive-by-wire: safety implications of automation in vehicles. Saf. Sci. 24, 35–49 (1996)
Chira-Chavala, T., Yoo, S.M.: Potential safety benefits of intelligent cruise control systems. Accid. Anal. Prev. 26, 135–146 (1994)
Rudin-Brown, C.M., Parker, H.A.: Behavioural adaptation to adaptive cruise control (ACC): implications for preventive strategies. Transp. Res. Part F Traffic Psychol. Behav. 7, 59–76 (2004)
Brown, C.M.: The concept of behavioural adaptation: does it occur in response to lane departure warnings? In: International Conference on Traffic and Transport Psychology, pp. 1–14 (2000)
Smiley, A.: Behavioural adaptation, safety, and intelligent transportation systems. Transp. Res. Rec. 724, 47–51 (2000)
Fancher, P.S., et al.: Intelligent cruise control field operation test. NHTSA Report No. DOT HS 808 849 (1998)
Stanton, N.A., Young, M., McCaulder, B.: Drive-by-wire: the case of driver workload and reclaiming control with adaptive cruise control. Saf. Sci. 27, 149–159 (1997)
Hoedemaeker, M., Kopf, M.: Visual sampling behaviour when driving with adaptive cruise control. In: Proceedings of the Ninth International Conference on Vision in Vehicles, Australia, 19–22 August 2001
de Winter, J.C.F., Happee, R., Martens, M.H., Stanton, N.A.: Effects of adaptive cruise control and highly automated driving on workload and situation awareness: a review of the empirical evidence. Transp. Res. Part F Traffic Psychol. Behav. 27, 196–217 (2014)
Pierre, P., et al.: Fatigue, sleepiness, and performance in simulated versus real driving conditions. Sleep 28, 1511–1516 (2005)
Tong, S., Helman, S., Balfe, N., Fowler, C., Delmonte, E., Hutchins, R.: Workload differences between on-road and off-road manoeuvres for motorcyclists. In: Longo, L., Leva, M.C. (eds.) H-WORKLOAD 2017. CCIS, vol. 726, pp. 239–250. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-61061-0_16
Aricò, P., et al.: Adaptive automation triggered by EEG-based mental workload index: a passive brain-computer interface application in realistic air traffic control environment. Front. Hum. Neurosci. 10, 539–552 (2016)
Prinzel, L.J., Freeman, F.G., Scerbo, M.W., Mikulka, P.J., Pope, A.T.: A closed-loop system for examining psychophysiological measures for adaptive task allocation. International Journal of Aviation Psychology 10, 393–410 (2000)
Di Flumeri, G., et al.: Mental workload assessment as taxonomic tool for neuroergonomics. In: Ayaz, H., Dehais, F. (eds.) Neuroergonomics. The Brain at Work and in Everyday Life. Elsevier, Amsterdam (2018)
Aricò, P., et al.: Human factors and neurophysiological metrics in air traffic control: a critical review. IEEE Rev. Biomed. Eng. 10, 250–263 (2017)
Hogema, J.H., Janssen, W.H., Coemet, M., Soeteman, H.J.: Effects of intelligent cruise control on driving behaviour: a simulator study. In: Proceedings of the 3rd World Congress on Intelligent Transport Systems (1996)
Costa, M., Bonetti, L., Bellelli, M., Lantieri, C., Vignali, V., Simone, A.: Reflective tape applied to bicycle frame and conspicuity enhancement at night. Hum. Factors 59, 485–500 (2017)
Costa, M., Bonetti, L., Vignali, V., Bichicchi, A., Lantieri, C., Simone, A.: Driver’s visual attention to different categories of roadside advertising signs. Appl. Ergon. 78, 127–136 (2019)
Costa, M., Simone, A., Vignali, V., Lantieri, C., Bucchi, A., Dondi, G.: Looking behavior for vertical road signs. Transp. Res. Part F Psychol. Behav. 23, 147–155 (2014)
Dienes, Z.: Assumptions of subjective measures of unconscious mental states: higher order thoughts and bias. J. Conscious. Stud. 11, 25–45 (2004)
Aricò, P., Borghini, G., Di Flumeri, G., Colosimo, A., Pozzi, S., Babiloni, F.: A passive brain–computer interface application for the mental workload assessment on professional air traffic controllers during realistic air traffic control tasks. Prog. Brain Res. 228, 295–328 (2016)
Di Flumeri, G., Aricò, P., Borghini, G., Colosimo, A., Babiloni, F.: A new regression-based method for the eye blinks artifacts correction in the EEG signal, without using any EOG channel. In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society (2016)
Elul, R.: Gaussian behavior of the electroencephalogram: changes during performance of mental task. Science 164, 328–331 (1969)
Klimesch, W.: EEG alpha and theta oscillations reflect cognitive and memory performance: a review and analysis. Brain Res. Rev. 29, 2–3 (1999)
Borghini, G., Astolfi, L., Vecchiato, G., Mattia, D., Babiloni, F.: Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci. Biobehav. Rev. 44, 58–75 (2014)
Olson, P.L., Sivak, M.: Perception-response time to unexpected roadway hazards. Hum. Fact. J. Hum. Fact. Ergon. Soc. 28, 91–96 (1986)
Li, Y., Chen, Y.: Driver vision based perception-response time prediction and assistance model on mountain highway curve. Int. J. Environ. Res. Public Health 14, 1–31 (2017)
Costa, M., et al.: The influence of pedestrian crossings features on driving behavior and road safety. In: Proceedings of the AIIT International Congress on Transport Infrastructure and Systems, pp. 741–746 (2017)
Costa, M., Bichicchi, A., Nese, M., Lantieri, C., Vignali, V., Simone, A.: T-junction priority scheme and road user’s yielding behavior. Transp. Res. Part F Traffic Psychol. Behav. 60, 770–782 (2019)
Costa, M., Bonetti, L., Vignali, V., Lantieri, C., Simone, A.: The role of peripheral vision in vertical road sign identification and discrimination. Transp. Res. Part F Traffic Psychol. Behav. 61, 1619–1634 (2018)
Costa, M., Simone, A., Vignali, V., Lantieri, C., Palena, N.: Fixation distance and fixation duration to vertical road signs. Appl. Ergon. 69, 48–57 (2018)
Lantieri, C., et al.: Gateway design assessment in the transition from high to low speed areas. Transp. Res. Part F Traffic Psychol. Behav. 34, 41–53 (2015)
Vignali, V., Bichicchi, A., Simone, A., Lantieri, C., Dondi, G., Costa, M.: Road sign vision and driver behaviour in work zones. Transp. Res. Part F Traffic Psychol. Behav. 60, 474–484 (2019)
Vignali, V., et al.: Effects of median refuge island and flashing vertical sign on conspicuity and safety of unsignalized crosswalks. Transp. Res. Part F Traffic Psychol. Behav. 60, 427–439 (2019)
Aricò, P., Borghini, G., Di Flumeri, G., Sciaraffa, N., Babiloni, F.: Passive BCI beyond the lab: current trends and future directions. Physiol. Meas. 39(8), 08TR02 (2018)
Di Flumeri, G., Aricò, P., Borghini, G., Sciaraffa, N., Di Florio, A., Babiloni, F.: The dry revolution: evaluation of three different EEG dry electrode types in terms of signal spectral features, mental states classification and usability. Sensors 19(6), 1365 (2019)
Acknowledgments
The authors are grateful to the Unipol Group Spa and, in particular, ALFAEVOLUTION TECHNOLOGY, for the considerable help given in the research study. This work has been also co-financed by the European Commission through the Horizon2020 project H2020-MG-2016 Simulator of behavioural aspects for safer transport, “SimuSafe”, (GA n. 723386), and the project “BrainSafeDrive: A Technology to detect Mental States During Drive for improving the Safety of the road” (Italy-Sweden collaboration).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Acerra, E. et al. (2019). EEG-Based Mental Workload and Perception-Reaction Time of the Drivers While Using Adaptive Cruise Control. In: Longo, L., Leva, M. (eds) Human Mental Workload: Models and Applications. H-WORKLOAD 2019. Communications in Computer and Information Science, vol 1107. Springer, Cham. https://doi.org/10.1007/978-3-030-32423-0_15
Download citation
DOI: https://doi.org/10.1007/978-3-030-32423-0_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-32422-3
Online ISBN: 978-3-030-32423-0
eBook Packages: Computer ScienceComputer Science (R0)