
Abstract
A dual technique-based inline strategy was explored in this research to enhance the conventional technique skill with regard to the limitation of wave oscillation period spreading. Instead of the single short section employed by the latter technique, the former utilizes a couple of two sub-short sections made of low density polymeric material (LDPE). Numerical computations were performed using the Method of Characteristics for the discretization of 1-D unconventional water-hammer model embedding the Vitkovsky and Kelvin-Voigt formulations. The dual technique efficiency was considered for an operating event involving the onset of cavitating flow. Results evidenced the reliability of the proposed technique for mitigating excessive hydraulic-head drop and rise, and demonstrated that the (LDPE/HDPE) plastic sub-short section combination provided an acceptable trade-off between hydraulic-head attenuation and transient wave oscillation period spreading. Ultimately, a sensitivity analysis of the wave amplitude attenuation and wave period spreading to the employed plastic sub-short sections lengths and diameters was reported to estimate the near-optimal values of the sub-short section dimensions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Cavitation
- Design
- Dual
- Inline
- Kelvin-Voigt
- LDPE
- Plastic material
- Method of characteristics
- Viscoelasticity
- Vitkovsky
- Water-Hammer
1 Introduction
Water-hammer control constitutes a major concern for hydraulic researchers and designers in order to protect hydraulic utilities from damage and to ensure the global economic efficiency and safety of hydraulic utilities, besides providing an adequate service level. Water hammer control is the most important feature governing the serviceability, integrity and safety of pressurized-piping utilities. An effective design of industrial pressurized piping systems does require the mitigation of unacceptable conditions onset; while ensuring the adequate service level.
From a design side, there are a large variety of design tools available to control severe water-hammer surge impacts (e.g.: surge tanks, air valves, or pressure vessels) [2, 7, 9]; [3, 5, 6, 10,11,12,13,14]; [15, 18].
In this context, the inline design strategy was recognized as being an effective tool for water-hammer control in pressurized-pipe flow. In particular, Triki [10, 11] explored the efficiency of an inline-based design strategy to upgrade existing steel-piping systems face to both up-and down-surge water-hammer severe effects. Precisely, the inline strategy, applied by the author, consists in substituting a short-section of the transient sensitive region of the existing steel-piping system by another one made of plastic pipe-wall material. Namely, the author made use of the high-and low-density polymeric material types ((HDPE) or (LDPE)). The author proved that such a technique could successfully be employed to attenuate excessive hydraulic-head rise and drop. Though interesting, this strategy exhibits a wave oscillation period spreading; which may affect negatively the operational procedure of the hydraulic system; such as increase of critical time of valve closure.
Overall, results evidenced a close dependency between hydraulic-head attenuation and wave period spreading. Specifically, the author observed that the case using an (LDPE) plastic short-section allowed more important hydraulic-head attenuation and a larger period spreading as compared with the case employing an (HDPE) short-section. Based on this result, it may be concluded that, as the wave speed of the short-section pipe-wall material decreases, the hydraulic-head attenuation and the wave oscillation period spreading increase. Physically, this result has obvious explanations. Indeed, the reduced modulus and the viscoelastic mechanical behavior of plastic materials, used for the short-section pipe-wall, results in a reduced wave speed (which may attenuate the surge wave amplitude), and a retarded strain of the pipe-wall (which may expand the wave fluctuation period) [4, 12, 13].
Alternatively, this paper addresses an improved (LDPE/LDPE) dual technique based on substituting up-and down-stream sub short sections of the existing steel-piping system by other ones made of (LDPE) plastic materials. This idea is intended to address the conventional technique drawback, mentioned above, by reducing the wave reflection time throughout the piping system; besides profiting from the important hydraulic-head attenuation provided by the forgoing plastic material type, of the system and limits the influence of the pressure wave.
The (1-D) unconventional water-hammer solver used to approximate the flow parameters are given in the next section.
2 Materials and Methods
To account for unsteady friction losses and pipe-wall viscoelastic behavior, the (1-D) unconventional water-hammer embedding the Vitkovsky et al. and the Kelvin-Voigt formulations is widely used in the literature [1, 16]; Szymkiewicz and Mitosek 2013):
where, h is the hydraulic-head; q is the flow discharge; A is the pipe cross sectional area; g is the gravity acceleration; \(a_{0}\) is the wave speed; \(h_{{f_{s} }}\) is the quasi-steady head-loss component per unit length; \(h_{{f_{u} }}\) is the unsteady friction losses evaluated using the Vitkovsky et al. [16] formula: \(h_{{f_{u} }} = \left( {k_{v} /gA} \right)\left\{ {\left( {\partial q/\partial x} \right) + a_{0} \,Sgn(Q)\left| {\partial q/\partial x} \right|} \right\}\), in which, \(k_{v} = 0.03\) is a decay coefficient, x and t are the coordinates along the pipe axis and time, respectively.
The retarded radial strain \(\varepsilon_{r}\) may be expressed basing on the linear-viscoelastic Kelvin-Voight formulation [1]:
where, \(J_{0}\) designates the elastic creep compliance, \(J_{k}\) and \(\tau_{k} (k = 0 \cdots n_{kv} )\) denote the creep-compliance and the retardation-time coefficients associated with \(k^{th}\) Kelvin-Voigt element, respectively, \(n_{kv}\) is the number of Kelvin-Voigt elements.
The Method of Characteristics (MOC) procedure selected for transient flow predictions is next outlined briefly (a detailed derivation of the general algorithm is reported in e.g.: [10, 11, 15].
The compatibility equations performed by the MOC procedure are given by:
in which, the superscript j refers to the pipe number (\(1 \le j \le np\); np is the number of pipes), \(\Delta t\) denotes the time-step increment and \(c_{r}^{{}}\) designates the Courant number associated with the spatial-discretization of the \(j^{th}\) pipe.
Basing on Eq. (4), the relationships between the hydraulic-head and the discharge may be written as follows:
where, \(c_{p}^{j} = \left( {q_{i - 1,t - 1}^{j} + \left( {1/B^{j} } \right)h_{i - 1,t - \Delta t}^{j} + c_{p1}^{\prime \prime j} + c_{p1}^{\prime \prime \prime j} } \right)/\left( {1 + c_{p}^{\prime j} + c_{p2}^{\prime \prime j} + c_{p2}^{\prime \prime \prime j} } \right)\);
\(B = a_{0} /\left( {gA} \right)\);\(c_{n}^{j} = \left( {q_{i + 1,t - 1}^{j} + \left( {1/B^{j} } \right)h_{i + 1,t - \Delta t}^{j} + c_{n1}^{\prime \prime } + c_{n1}^{\prime \prime \prime } } \right)/\left( {1 + c_{n}^{\prime j} + c_{n2}^{{{\prime \prime }j}} } \right)\);
\(c_{a + }^{j} = 1 + c_{p2}^{\prime \prime \prime j} /\left( {B^{j} \left( {1 + c_{p2}^{{{\prime }j}} + c_{p2}^{\prime \prime j} } \right)} \right)\); \(c_{p}^{{{\prime }j}} = R^{j} \Delta t\left| {q_{i - 1,t - 1}^{j} } \right|\); \(c_{n}^{{{\prime }j}} = R^{j} \Delta t\left| {q_{i + 1,t - 1}^{j} } \right|\);
\(R^{j} = f^{j} /2D^{j} A^{j}\);
\(c_{{p_{1} }}^{\prime \prime j} = k_{v}\uptheta\,q_{i,t - 1}^{j} - k_{v} \left( {1 -\uptheta} \right)\left( {q_{i - 1,t - 1}^{j} - q_{i - 1,t - 2}^{j} } \right) - k_{v} {\mathbf{sgn}}\left( {q_{i - 1,t - 1}^{j} } \right)\left( {q_{i,t - 1}^{j} - q_{i - 1,t - 1}^{j} } \right)\);
\(c_{{n_{1} }}^{\prime \prime j} = k_{v}\uptheta\,q_{i,t - 1}^{j} - k_{v} \left( {1 -\uptheta} \right)\left( {q_{i + 1,t - 1}^{j} - q_{i + 1,t - 2}^{j} } \right) - k_{v} {\mathbf{sgn}}\left( {q_{i + 1,t - 1}^{j} } \right)\left( {q_{i,t - 1}^{j} - q_{i + 1,t - 1}^{j} } \right)\);
\(c_{{p_{1} }}^{\prime \prime \prime j} = - c_{{n_{1} }}^{\prime \prime \prime j} = - 2a_{0}^{j} A^{j} \Delta t\sum\limits_{k = 1}^{{n_{kv} }} {\left[ {\varepsilon_{r\,k}^{j} \left( {x,t} \right)/\partial t} \right]}\); \(c_{{p_{2} }}^{\prime \prime \prime j} = c_{{n_{2} }}^{{{\prime \prime \prime }j}} = 2a_{0}^{j} A^{j} c_{0} \gamma \sum\limits_{k = 1}^{{n_{kv} }} {J_{k}^{j} \left( {1 - e^{{ - \left( {\Delta t/\tau_{k} } \right)}} } \right)}\);
\(\begin{aligned} & \varepsilon_{r\,k,i,t - \Delta t}^{j} = J_{k}^{j} c_{0} \left\{ {\left[ {h_{i,t - \Delta t}^{j} - h_{i,0}^{j} } \right] - e^{{ - \left( {\Delta t/\tau_{k} } \right)}} \left[ {h_{i,t - 2\Delta t}^{j} - h_{i,0}^{j} } \right] - } \right.\left. {\tau_{k} \left( {1 - e^{{ - \left( {\Delta t/\tau_{k} } \right)}} } \right)\left[ {h_{i,t - \Delta t}^{j} - h_{i,t - 2\Delta t}^{j} } \right]/\Delta t} \right\} \\ & \quad + e^{{ - \left( {\Delta t/\tau_{k} } \right)}} \varepsilon_{r\,k,i,t - 2\Delta t} \\ \end{aligned}\)
\(c_{{p_{2} }}^{\prime \prime j} = c_{{n_{2} }}^{\prime \prime j} = k_{v}\uptheta\), (\(\uptheta = 1\) is a relaxation coefficient); and \(c_{0} = \alpha \gamma D^{j} /2e^{j}\).
It is worth noting that the above MOC algorithm is established for a one-phase flow regime. For a cavitating flow regime, the discrete gas cavity procedure (DGCM) may be included into the conventional MOC solution.
Basically, the DGCM procedure assumes that void cavities are lumped at the computing sections.
The discretization of the perfect gas law for an isothermic evolution of each gas cavity leads to [19]:
in which, \(h_{0}\) is the hydraulic-head reference, \(\upalpha_{0}\) the void fraction at \(h_{0}\), \(z_{i}^{j}\) the pipe axis elevation and \(h_{g}\) the gauge hydraulic-head of the liquid.
The discretization of the continuity equation applied for the cavity control volume leads to the expression of the cavity volume:
where, \(q_{u}\) and \(q_{d}\) are the flowrates, computed at the upstream and downstream sides of the cavity interface [19].
It is interesting to point out here that the flow regime is regarded as cavitating type for: \(\forall_{g\,i,t}^{j} \prec 0\). Otherwise, it is considered as a one-phase type.
Series connection of multi-pipes:
The discharge and the hydraulic-head at the series connection may be expressed, assuming no flow storage common hydraulic grade-line elevation [10, 17, 19]:
in which, the right and left hands of Eq. (8) designate the hydraulic parameter values at the upstream and downstream sides of the junction.
Next section is devoted to assess the reliability of the dual technique to control water-hammer waves involving a cavitating flow onset.
3 Applications, Results and Discussion
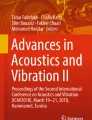
The case study concerns a sloping steel pipe (length: \(L = 100\;{\text{m}}\); internal diameter: \(D = 50.6\;{\text{mm}}\); pipe-wall thickness: \(e = 3.35\;{\text{mm}}\) and elastic-wave-speed: \(a_{0} = 1369.7\;{\text{m/s}}\), up-and down-stream axis elevations \(z_{d} = 0\;{\text{m}}\) and \(z_{u} = 2.03\;{\text{m}}\), respectively) connecting two pressurized-tanks (Fig. 1a). The gauge saturated hydraulic-head of the liquid is \(h_{g} = - 10.29\;{\text{m}}\). The initial steady-state regime is established for a constant flow velocity: \(V_{0} = 0.3\;{\text{m/s}}\) and a constant hydraulic-head maintained at downstream pressurized-tank: \(h_{0}^{{T_{2} }} = 21.4\;{\text{m}}\). The transient regime is provoked by the sudden and full closure of the upstream valve:

Schematic implementation of the dual-inline technique
For this transient situation, the dual technique consists in substituting an up-and down-stream sub short-section of the original steel-piping system by a couple of plastic sub short section made of (LDPE) material (Fig. 1b), whereas the conventional technique handles only the upstream extremity of the original piping system using the same procedure. The creep compliance coefficients of the generalized Kelvin-Voigt model associated to (LDPE) material are: \(J_{0} = 1.54\,{\text{GPa}}^{ - 1}\); \(\left\{ {J/\tau } \right\}_{1 \cdots 5} \left( {{\text{GPa}}^{ - 1} /{\text{s}}} \right) = \left\{ {7.54/\left( {89 \times 10^{ - 6} } \right);10.46/0.022;0.262/1.864} \right\}\) [8].
As a first investigation step, the sub short-sections lengths and diameters values, used in the dual technique, \(l_{{{\text{sub}}\;{\text{short}} - {\text{section}}}}^{\text{dual}} = 5\,{\text{m}}\) and \(d_{{{\text{sub}}\;{\text{short}} - {\text{section}}}}^{\text{dual}} \left( { = D} \right) = 50.6\,{\text{mm}}\), respectively; however, the corresponding short-section length and diameter used in the conventional technique, are: \(l_{{{\text{short}} - {\text{section}}}}^{\text{conventional}} = 10\,{\text{m}}\) and \(d_{{{\text{short}} - {\text{section}}}}^{\text{conventional}} = 50.6\,{\text{mm}}\), respectively.
Figure 2, illustrates the hydraulic-head signals predicted into the original system case along with their counterpart involved by the protected systems cases using the (HDPE) or (LDPE) short-section-based conventional technique or the (LDPE/LDPE) sub short-sections–based dual technique. Jointly, the main characteristics of the wave curves, illustrated in Fig. 2, are enumerated in Table 1.

Comparison of upstream hydraulic-head signals predicted into the original system case and the protected system cases based on a (HDPE) or (LDPE)–based conventional technique and the (LDPE/LDPE)–based dual technique
A key observation from Fig. 2 relates to the cavitation onset in the original system case. As per Fig. 2 and Table 1, succeeding the upstream valve closure, the hydraulic-head first falls to the gauge value \(h_{\hbox{min} } = - 10.2\,{\text{m}}\), and subsequently rises to a first hydraulic-head peak value: \(h_{\hbox{max} } = 64.2\,{\text{m}}\). In other words, the magnitude values of hydraulic-head-drop and-rise, computed referring to the initial steady-state benchmark, are \(\Delta h_{{{\mathbf{steel}} - {\mathbf{pipe}}}}^{ - } = 32.6\,{\text{m}}\) and \(\Delta h_{{{\mathbf{steel}} - {\mathbf{pipe}}}}^{ + } = 41.8\,{\text{m}}\), respectively.
Nonetheless, Fig. 2 proves that the cavitating flow regime may be avoided if the hydraulic system is controlled using the (LDPE) conventional technique or the (LDPE/LDPE) dual technique–based inline strategy. For instance, Fig. 2 (and Table 1) depicts a low hydraulic-head drop magnitude equal to: \(\Delta h_{{{\mathbf{LDPE}}}}^{ - } = 19.6\,{\text{m}}\) or \(\Delta h_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{ - } = 20.7\,{\text{m}}\), associated with (LDPE) short-section–based conventional technique or (LDPE/LDPE) sub short-sections–based dual technique, respectively. Specifically, these configurations allow a significant attenuation of first hydraulic-head crest as compared with those depicted into the original system case: \(\updelta\,h_{{{\mathbf{LDPE}}}}^{ - } = \Delta h_{{{\mathbf{LDPE}}}}^{ - } - \Delta h_{{{\mathbf{steel}}}}^{ - } = 12.98\,{\text{m}}\) or \(\updelta\,h_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{ - } = \Delta h_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{ - } - \Delta h_{{{\mathbf{steel}}}}^{ - } = - 11.85\,{\text{m}}\), respectively. Similarly, the (LDPE) setup of the conventional technique or the (LDPE/LDPE) setup of dual technique involves a attenuation of first hydraulic-head peak \(\updelta\,h_{{{\mathbf{LDPE}}}}^{ + } = \Delta h_{{{\mathbf{LDPE}}}}^{ + } - \Delta h_{{{\mathbf{steel}}}}^{ + } = 16.5\,{\text{m}}\) or \(\updelta\,h_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{ + } = \Delta h_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{ + } - \Delta h_{{{\mathbf{steel}}}}^{ + } = 17.7\;{\text{m}}\), respectively, as compared with the original system case.
Furthermore, the dual technique based on a (LDPE/LDPE) sub short-sections induces a spreading of the wave oscillations period equal to: \(\updelta\,T_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{1} = \left| {T_{{{\mathbf{steel}}}}^{1} - T_{{{\mathbf{LDPE}} - {\mathbf{LDPE}}}}^{1} } \right| = 0.763\,{\text{s}}\) as compared with that corresponding to the original system case. Similarly, a lower period spreading is induced by the (LDPE/LDPE) sub short-sections–based dual technique relatively to the HDPE short-section–based conventional technique \(({\delta^{\prime}}T_{{{\mathbf{LDPE}} - {\mathbf{LDPE}}}}^{1} = \left| {T_{{{\mathbf{HDPE}}}}^{1} - T_{{{\mathbf{LDPE}} - {\mathbf{LDPE}}}}^{1} } \right| = 0.437\,{\text{s)}}\). Nevertheless, the (LDPE/LDPE) configuration of the dual technique augmented slightly the period spreading relatively to that induced into the (LDPE) configuration of the conventional technique \((\updelta^{{{\prime \prime }}} T_{{{\mathbf{LDPE}}/{\mathbf{LDPE}}}}^{1} = \left| {T_{{{\mathbf{LDPE}}}}^{1} - T_{{{\mathbf{LDPE}} - {\mathbf{LDPE}}}}^{1} } \right| = 0.075\,{\text{s)}}\).
From the above discussions, it may be confirmed that the (LDPE/LDPE) configuration of the dual technique provides an acceptable trade-off between the attenuation of hydraulic-head peak (and crest) and the limitation of spreading of hydraulic-head oscillation period.
Additional task concerns the sensitivity analysis of the first upstream hydraulic-head peak or crest values and wave oscillation period value to the sub short-section diameter and length. For completeness, this analysis is illustrated in Fig. 3a and b, respectively. Figure 3a and b show that the reduction in hydraulic peak or crest magnitude and the augmentation of the period of hydraulic-head oscillation are principally driven by an increase in upstream sub-short-section length and diameter. Besides, small attenuation (or amplification) effects associated with hydraulic-head peak or crest and wave oscillation period are observed beyond the sub-short-section diameter and length values: \(l_{{{\text{sub}}\;{\text{short}} - {\text{section}}}}^{\text{downstream}} = 2.5\,{\text{m}}\) and \(d_{{{\text{sub}}\;{\text{short}} - {\text{section}}}}^{\text{downstream}} = 0.0506\,{\text{m}}\).

Variation of hydraulic-head peak and crest depending on the short-section: a—diameter and b—length
Hence, the foregoing length and diameter values may be considered as the near optimal values for both up-and-down-stream sub short-sections.
4 Conclusion
To sum up, the (LDPE/LDPE) sub short-sections–based dual-technique provided significant attenuation of hydraulic-head peak and crest. Furthermore, this strategy differs in interesting ways from the conventional technique based inline strategy with regard to limitation of the spreading hydraulic-head oscillation period. Additionally, the parametric study of hydraulic-head peak or crest values with respect to the sub-short-section length and diameter identified the near-optimal value for dimensioning the dual sub short-sections.
Though the dual technique-based inline control strategy is numerically tested on a single pipeline system, experimental investigations on the presented strategy may be considered as motivating research perspectives of this study.
References
Aklonis JJ, MacKnight WJ, Shen M (1972) Introduction to polymer viscoelasticity. Wiley-Interscience-John Wiley & Sons, Inc
Bergant A, Simpson AR, Tijsseling A (2006) Waterhammer with column separation: a historical review. J Fluids Struct 22(2):135–171. https://doi.org/10.1016/j.jfluidstructs.2005.08.008
Besharat M, Tarinejad R, Ramos H (2015) The effect of water hammer on a confined air pocket towards flow energy storage system. J Water Supply Res Technol-Aqua 65(2):116–126. doi.:https://doi.org/10.2166/aqua.2015.081
Ferry JD (1970) Viscoelastic properties of polymers, 2nd edn. John Wiley & Sons, New York
Fersi M, Triki A (2018) Investigation on redesigning strategies for water-hammer control in pressurized-piping systems. J Press Vessel Technol–Trans ASME. https://doi.org/10.1115/1.4040136
Fersi M, Triki A (2019) Alternative design strategy for water-hammer control in pressurized-pipe flow. In: Fakhfakh T, Karra C, Bouaziz S, Chaari F, Haddar M (eds) Advances in acoustics and vibration II. ICAV 2018. Applied condition monitoring, vol 13, pp 135–144. Springer, pp 157–165. https://doi.org/10.1007/978-3-319-94616-0_16
Ghilardi P, Paoletti A (1986) Additional viscoelastic pipes as pressure surge suppressors. Proceedings of the 5th international conference on pressure surges. Cranfield (UK), pp 113–121
Güney MS (1983) Water-hammer in viscoelastic pipes where cross-section parameters are time dependent. In: Proceedings of the 4th international conference on pressure surges. BHRA, Bath, U.K, pp 189–209
Massouh F, Comolet R (1984) Étude d’un système anti-bélier en ligne-Study of a water-hammer protection system in line. La Houille Blanche 5:355–362. https://doi.org/10.1051/lhb/1984023
Triki A (2016) Water-hammer control in pressurized-pipe flow using an in-line polymeric short-section. Acta Mech 227(3):777–793. https://doi.org/10.1007/s00707-015-1493-13
Triki A (2017) Water-Hammer control in pressurized-pipe flow using a branched polymeric penstock. J Pipeline Syst-Eng Pract–ASCE 8(4):04017024. doi.: https://doi.org/10.1061/(asce)ps.1949-1204.0000277
Triki A (2018-a) Further investigation on water-hammer control inline strategy in water-supply systems. J Water Suppl Res Technol-AQUA 67(1):30–43. https://doi.org/10.2166/aqua.2017.073
Triki A (2018-b) Dual-technique based inline design strategy for Water-Hammer control in pressurized-pipe flow. Acta Mech 229(5):2019–2039. doi.org/https://doi.org/10.1007/s00707-017-2085-z
Triki A, Fersi M (2018) Further investigation on the Water-Hammer control branching strategy in pressurized steel-piping systems. Int J Press Vessels Pip 165(C):135–144. https://doi.org/10.1016/j.ijpvp.2018.06.002
Triki A, Chaker MA (2019) Compound technique-based inline design strategy for water-hammer control in steel pressurized-piping systems. Int J Pres Ves Pip 169C:188–203. https://doi.org/10.1016/j.ijpvp.2018.12.001
Vitkovsky JP, Lambert MF, Simpson AR, Bergant A (2000) Advances in unsteady friction modelling in transient pipe flow. In: The 8th international conference on pressure surges BHR the hague the Netherlands
Wan W, Huang W (2018) Water hammer simulation of a series pipe system using the MacCormack time marching scheme. Acta Mech 229(7):3143–3160. https://doi.org/10.1007/s00707-018-2179-2
Wan W, Zhang B, Chen X (2019) Investigation on water hammer control of centrifugal pumps in water supply pipeline systems. Energies 12(1):108. doi.:https://doi.org/10.3390/en12010108
Wylie EB, Streeter VL (1993) Fluid transients in systems. Prentice Hall, Englewood Cliffs NJ
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Trabelsi, M., Triki, A. (2020). Water-Hammer Control in Pressurized Pipe Flow Using Dual (LDPE/LDPE) Inline Plastic Sub Short-Sections. In: Aifaoui, N., et al. Design and Modeling of Mechanical Systems - IV. CMSM 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-27146-6_102
Download citation
DOI: https://doi.org/10.1007/978-3-030-27146-6_102
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27145-9
Online ISBN: 978-3-030-27146-6
eBook Packages: EngineeringEngineering (R0)