
Abstract
In this paper, a model of an unusual elastic–plastic hysteresis is constructed and discussed following the recent progress in investigation of the fullerene films. The constructive model is based on the operator technique of hysteretic nonlinearities. To describe the input–output relations, we use the Ishlinkii’s operator technique together with the probability model based on the Kolmogorov–Chapman equation.
This work was supported by the RFBR (Grants 16-08-00312-a, 17-01-00251-a, and 18-08-00053-a).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


1 Introduction
The hysteretic effects take place in various areas of material science (at both macro- and microlevels). Depending on purposes of investigation, both the phenomenological and constructive (based on the first principles) models can be used and there are many literature sources on this subject (see, e.g., [4, 5] and related references). As a rule, in the constructive models that are described by the relations “input-state” and “state-output” [8, 9], the dynamical properties of the hysteresis carrier were not taken into account.
As it is known, the mechanical properties almost all materials (namely, the elastic–plastic hysteresis, or hysteretic properties of the material) remain unchanged (the hysteretic dependence of elastic–plastic materials does not depend on the speed of mechanical affection). However, the results of recent experiments with the fullerene nanofilms [6] show that the shape of hysteretic curve in the coordinates “force–displacement” depends on the speed of force application.
In this work, we propose a dynamical probability model of hysteresis for description of elastic–plastic properties of nanoscale fullerene film taking into account the electromagnetic nature of the fullerene clusters binding. This model is based on the fact that the decay law for fullerene supercluster \([C_{60}]_{n}\) (especially for \(n = 2\)) depends on external conditions (temperature, pressure, etc.) as well as is of probabilistic nature. A description of the decay law at the macroscopic level can be made using the well-known theory of random processes (a basic object in this field is the Kolmogorov–Chapman equation).
2 Hysteresis in Nanoscale Films
In recent years, the self-regenerating materials and covers are intensively investigated [2, 3, 6, 11]. Such covers regenerate when on its surface a little injury takes place. Usually, such covers contain the capsules with the “regenerating agent.” When the damage takes place, the capsules break and, as a result, there are chemical reactions that lead to vanishing of the injury. In this work, we consider the covers that have self-regenerating properties, but this effect is provided by the hysteretic properties of the cover’s material. This cover is coated by two beams of buckyball, namely, the molecular (the PVD technology) and ion (the magnetron technology). The basic “object” in the regeneration effect is the unusual elastic–plastic hysteresis which is caused by the depolymerization of fullerene. As it was shown in [6], on the surface of nanofilm there are some “liftings” at small mechanical affection by the probe with the diameter less than 200 nm. It is also shown that the relief changing does not connect with the adhesion of the film to the probe.
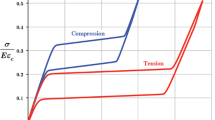
As it is known, the elastic–plastic hysteresis manifests in macro-level in such a way that the hysteresis loop gets over clockwise. Herewith, as a rule, a form and other characteristics of the loop do not depend on the speed of mechanical affections. However, for the material under consideration, such a dependence takes place (namely, the form of the hysteretic loop depends on the speed of force affection).
3 Dynamical Hysteretic Model
Here, we present a model of the observable effect. The dependence of the loop’s form on time means that the presented model should be nonstationary.
It is well known that the physical properties of nanofilms depend on the structure of the materials. Main processes in such nanocovers occur due to the polymerization and depolymerization processes. These processes can be initialized by the temperature, light, or mechanical affections. It should be also pointed out that the polymerization together with the depolymerization occurs according to the probability laws. The main assumption of this model consists in the fact that the depolymerization process is turning on when the cover is under temporal excess pressure.
The state of the cover can be described by the pair of parameters \((\omega _{1}(t), \omega _{2}(t))\) that are the fraction of the domains under polymerization and depolymerization, respectively. The dynamics of these parameters can be described by the Kolmogorov–Chapman equation (here the dot displays the time derivative):
with the initial conditions \(\omega _{1}(0)=\omega _{01}\), \(\omega _{2}(0)=\omega _{02}\). Linear volumes, \(x_{1}\) and \(x_{2}\), are connected to these states, respectively. At the same time, the dependence of these linear volumes on the external force u, we can define as
using the Ishlinskii’s operator which will be described below. Finally, the dependence of a displacement on the external force can be determined by the following relation:
Equations (1)–(3) are the base of the proposed model.
At the same time, the intensities of transitions \(\lambda _{1}\) and \(\lambda _{2}\) should also depend on the external force and are driven by the relations \(\lambda _{1}=\lambda _{1}(u)\) and \(\lambda _{2}=\lambda _{2}(u)\). Identification of these dependencies from the known experimental data is a complicated problem. Namely, there are certain facts which indicate that these functions are monotonically increasing. In this work, we suppose that these functions can be chosen in the form
with the positive parameters.
3.1 Some Remarks on Ishlinskii’s Operator
Here, we present some details on the Ishlinskii’s operator technique (details of application of this technique can be found, e.g., in [1, 7, 10] and related references). First, let us introduce the necessary definitions.
The stop is an operator \(W[t_{0}, x_{0}, E, h]\) which connects every continuous input u(t) \((t \geqslant 0)\) with output x(t) by the following rule (for the monotonic inputs):
Here, E is the elastic modulus of the material (we understand u(t) and x(t) as stress and deformation, respectively).
For the piecewise monotonic inputs, the output can be determined using the semigroup identity
and then, using the special limit construction, such an operator can be redefined for all continuous inputs. A detailed description of this operator as well as its properties is presented in the book Krasnosel’skii and Pokrovskii [5].
Let \(U(h)=W[t_{0}, x_{0}, 1, h]\) be a single-parameter kind of stop with the elastic modulus equal to 1 and the yield stress \(\pm h\). Let us define the nondecreasing continuous function \(\Omega = \Omega (h)\) \((h \geqslant 0)\) which satisfies the following condition:
In the following consideration, we will use the condition (5) in the form
Let us denote as Z the set of continuous functions z(h) \((h\geqslant 0)\) that satisfy the inequality \(|z(h)|\leqslant h\) \((0\leqslant h<\infty )\). Then, the pairs \(\{u_{0}; z(h)\}\) form the set which determines the state space of the operator U. The dynamics of input–output relations is determined as
Here, the integral is understood in the sense of Riemann–Stieltjes. However, it should be noted that this relation is uncomfortable for calculations of the output of Ishlinskii’s operator.
As it follows from the definition, the operator U(h) describes the ideal plastic fiber with the elastic modulus \(E=\xi \) and the plastic limits \(\pm \xi h\). Let us consider also the so-called charge function
The analog of this function for the Ishlinskii’s operator is the function
and the discharge function
In this way, the Ishlinskii’s operator is the model of plastic body which is composed of the continual number of ideal plastic fibers. As it follows from the definition, for a monotonic input and uncharged state the alternating stress can be expressed in terms of the charge function, namely \(x(t)=\chi _{+}\left( u(t)-u(t_{0}),\Omega \right) \).
On the piecewise monotonic inputs, the Ishlinskii’s operator can be determined (in analogous manner) using the semigroup identity. Unfortunately, relation (8) allows to determine the output using the charge function only at zero initial state. However, in the considered case, this condition is not restrictive because at the initial moment the state of a nanomaterial is naturally supposed to be uncharged.
Finally, the model which describes the dynamics of the system under consideration is based on Eqs. (1)–(3) together with the relations
where u(t) is an external force applied to the fullerene film; \(z_{01}(h)\) and \(z_{02}(h)\) correspond to initial uncharged states of polymerized and depolymerized fractions, respectively.
In the experiments described in [6], the external charge is determined as a piecewise linear function, namely,
4 Conclusions
The results of numerical simulations show that the qualitative behavior of the hysteretic curves (in the frame of the proposed model) significantly depends on a choice of the parameters \(c_{1}\) and \(c_{2}\) which determine the intensity of transitions from depolymerized state and back. Optimization of the model by these (and other) parameters allows to obtain the results that differ from the experimental results approximately within 3%.
References
M. Arnold, N. Begun, P. Gurevich et al., Dynamics of discrete time systems with a hysteresis stop operator. SIAM J. Appl. Dyn. Syst. 16, 91–119 (2017)
E.G. Atovmyan, A.A. Grishchuk, T.N. Fedotova, Russ. Chem. Bull. 60, 1505–1507 (2011)
B.M. Darinsky, M.E. Semenov, A.M. Semenov, P.A. Meleshenko, in Progress in Electromagnetics Research Symposium Proceedings (Prague, 2015), pp. 1716–1719
F. Ikhouane, J. Rodellar, Systems with Hysteresis: Analysis, Identification and Control Using the Bouc–Wen Model (Wiley, 2007)
M.A. Krasnosel’skii, A.V. Pokrovskii, Systems with Hysteresis (Springer, Berlin, 1989)
O.V. Penkov, V.E. Pukha et al., Self-healing phenomenon and dynamic hardness of \(C_{60}\)-based nanocomposite coatings. Nano Lett. 14, 2536–2540 (2014)
M. Ruderman, D. Rachinskii, Use of Prandtl-Ishlinskii hysteresis operators for Coulomb friction modeling with presliding. J. Phys. Conf. Ser. 811(1), 012013 (2017)
M.E. Semenov, P.A. Meleshenko, A.M. Solovyov, A.M. Semenov, Hysteretic nonlinearity in inverted pendulum problem. Springer Proc. Phys. 168, 463–506 (2015)
M.E. Semenov, A.M. Solovyov et al., Hysteretic damper based on the Ishlinsky-Prandtl model. MATEC Web Conf. 83, 01008 (2016)
M.E. Semenov, A.M. Solovyov, P.A. Meleshenko, J.M. Balthazar, Nonlinear damping: from viscous to hysteretic dampers. Springer Proc. Phys. 199, 259–275 (2017)
Y. Wang, H. Zettergren, P. Rousseau et al., Formation dynamics of fullerene dimers \(C^+_{118}\), \(C^+_{119}\), and \(C^+_{120}\). Phys. Rev. A 89, 062708 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Meleshenko, P.A., Semenov, A.M., Barsukov, A.I., Stenyukhin, L.V., Kuznetsova, V.P. (2019). Unusual Elastic–Plastic Properties of Fullerene Films: Dynamical Hysteretic Model. In: Korobeinikov, A., Caubergh, M., Lázaro, T., Sardanyés, J. (eds) Extended Abstracts Spring 2018. Trends in Mathematics(), vol 11. Birkhäuser, Cham. https://doi.org/10.1007/978-3-030-25261-8_41
Download citation
DOI: https://doi.org/10.1007/978-3-030-25261-8_41
Published:
Publisher Name: Birkhäuser, Cham
Print ISBN: 978-3-030-25260-1
Online ISBN: 978-3-030-25261-8
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)