
Abstract
Cops and robber game on a directed graph \(\overrightarrow{D}\) initiates by Player 1 placing k cops and then Player 2 placing one robber on the vertices of \(\overrightarrow{D}\). After that, starting with Player 1, alternately the players may move each of their tokens to the adjacent vertices. Player 1 wins if, after a finite number of moves, a cop and the robber end up on the same vertex and Player 2 wins otherwise. However, depending on the type of moves the players make, there are three different models, namely, the normal cop model: both cops and robber move along the direction of the arcs; the strong cop model: cops can move along or against the direction of the arcs while the robber moves along them; and the weak cop model: the robber can move along or against the direction of the arcs while the cops move along them. A graph is cop-win if Player 1 playing with a single cop has a winning strategy. In this article, we study the three models on some families of oriented graphs and characterize the cop-win directed graphs for the third model.
This work is partially supported by the IFCAM project Applications of graph homomorphisms (MA/IFCAM/18/39).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


1 Introduction
Cops and Robber is a popular two-player game introduced by Nowakowski and Winkler [22] in 1983 having applications in artificial intelligence, graph search, game development etc. [3, 15, 16] as well as significant implications in theory [23]. The game is extensively studied since its introduction giving rise to deep theory (see [4] for details) and its numerous variations contributed to its extent.
Recently, Nicolas NisseFootnote 1 [8] introduced one of the variants (the strong cop model) in directed graphs (digraphs) and asked to characterize the “cop-win” graphs in two variants (the normal cop model and the strong cop model). In a seminar (summer 2018) at Simon Fraser University, another natural variant was discussed where the first author was present. In this article, we study all three variants, starting by presenting their precise definitions.
Setup and initiation: We start with an orientedFootnote 2 graph \(\overrightarrow{G}\) and Player 1 places k cops on its vertices (multiple cops can be on the same vertex). After that Player 2 places the robber on one vertex of the graph.
Play: After the setup, Player 1 and 2 take turns to move their cops and robber, respectively, with Player 1 taking the first turn.
Winning: Player 1 wins if after finitely many turns the robber and a cop are on the same vertex. In this case, we say that the cop captures the robber. Player 2 wins if Player 1 does not win in finite number of moves.
Normal Move: Suppose uv is an arc. In a normal move, the cop/robber can move only from u to v.
Strong Move: Suppose uv is an arc. In a strong move, the cop/robber can move from u to v as well as from v to u.
Normal Cop Model: In their respective turns, Player 1 and Player 2 can perform at most one normal move on each of its cops, and the robber respectively.
Strong Cop Model: In their respective turns, Player 1 can perform at most one strong move on each of its cops, whereas Player 2 can perform at most one normal move on the robber.
Weak Cop Model: In their respective turns, Player 1 can perform at most one normal move on each of its cops, whereas Player 2 can perform at most one strong move on the robber.
Now that we have described the three models, we define a few necessary parameters. The normal (resp., strong, weak) cop number \(c_n(\overrightarrow{G})\) (resp., \(c_s(\overrightarrow{G})\), \(c_w(\overrightarrow{G})\)) of an oriented graph \(\overrightarrow{G}\) is the minimum number of cops needed by Player 1 to have a winning strategy in the normal (resp., strong, weak) cop model. Furthermore, for a family \(\mathcal {F}\) of oriented graphs
where \(x \in \{n,s,w\}\). Given a fixed model, an oriented graph is cop-win if Player 1 has a winning strategy playing with a single cop.
Below we give a brief survey of the literature concerning the normal cop model, followed by a summary of our results.
Survey: Hamidoune [12] considered the game on Cayley digraphs. Frieze et al. [9], studied the game on digraphs and gave an upper bound of \(O\left( \frac{n(\log \log n)^2}{\log n}\right) \) for cop number in digraphs. Along these lines, Loh and Oh [21] constructively proved the existence of a strongly connected planar digraph with cop number greater than three. They also prove that every n-vertex strongly connected planar digraph has cop number at most \(O(\sqrt{n})\).
Goldstein and Reingold [10] proved that deciding if k cops can capture a robber is EXPTIME-complete if k is not fixed and either the initial positions are given or the graph is directed. Later Kinnersley [19] proved that determining the cop number of a graph or digraph is EXPTIME-complete. Kinnersley [20] also showed that n-vertex strongly connected cop-win digraphs can have capture time \(\varOmega (n^2)\).
Hahn and MacGillivray [11] gave an algorithmic characterization of the cop-win finite reflexive digraphs. They also showed that any k-cop game can be reduced to 1-cop game (resulting in an algorithmic characterization for k-cop-win finite reflexive digraphs). However, these results do not give a structural characterization of such graphs. Later Darlington et al. [6] tried to structurally characterize cop-win oriented graphs and gave a conjecture which was later disproved by Khatri et al. [17], who also study the game in oriented outerplanar graphs and line digraphs.
Recently, Hosseini and Mohar [13] (also see [14]) studied whether cop number of planar Eulerian digraphs is bounded or not, and point to evidence of the former.
Organization and Results: In Sect. 2, we compare the parameters \(c_n(\cdot ), c_s(\cdot )\), \(c_w(\cdot )\). The normal, strong and weak cop models are studied in Sects. 3, 4 and 5, respectively. We give an outline of our results.
-
1.
Normal Cop Model
-
Prove a Mycielski-type result by constructing oriented graphs with high normal cop number and girth.
-
Characterize oriented triangle-free and outerplanar normal cop-win graphs.
-
-
2.
Strong Cop Model
-
Find strong cop number of oriented planar graphs, oriented outerplanar graphs and oriented series-parallel graphs.
-
Prove that a specific class of oriented outerplanar graphs (whose weak dual is a collection of paths) and oriented grids are strong cop-win.
-
-
3.
Weak Cop Model
-
Characterize weak cop-win oriented graphs.
-
Now we look into some relations between the parameters \(c_n(\cdot ), c_s(\cdot )\), \(c_w(\cdot )\) and some definitions.
2 Basic Results and Preliminaries
The first result follows directly from the definitions.
Proposition 1
For any oriented graph \(\overrightarrow{G}\) we have \(c_s(\overrightarrow{G}) \le c_n(\overrightarrow{G}) \le c_w(\overrightarrow{G})\).
Observe that there are plenty of oriented graphs, the transitive tournament for instance, where equality hold in each of the cases. However, it is interesting to study the gap between these parameters. But first we will introduce some notations and terminologies. Let uv be an arc of an oriented graph \(\overrightarrow{G}\). We say that u is an in-neighbor of v and v is an out-neighbor of u. Let \(N^-(u)\) and \(N^+(u)\) denote the set of in-neighbors and out-neighbors of u respectively. A vertex without any in-neighbor is a source and a vertex without any out-neighbor is a sink.
Proposition 2
Given any \(m,n \in \mathbb {N}\), there exists an oriented graph \(\overrightarrow{G}\) such that \(c_n(\overrightarrow{G}) - c_s(\overrightarrow{G})= n\) and \(c_w(\overrightarrow{G}) - c_n(\overrightarrow{G})\ge m\).
Proof
The oriented graph \(\overrightarrow{G} = \overrightarrow{G}_{m,n}\) is composed of two oriented graphs \(\overrightarrow{A}_n\) and \(\overrightarrow{B}_m\). The oriented graph \(\overrightarrow{A}_n\) is an orientation of the star graph such that its central vertex v is a sink having degree \(n+1\).
We know that there exist graphs with arbitrarily high cop number in undirected case [1]. Let \(B_m\) be a connected undirected graph with cop number at least m. Let \(\overrightarrow{B}_n\) be such an orientation of \(B_m\) that it is a directed acyclic graph having a single source u. The graph \(\overrightarrow{G}_{m,n}\) is obtained by merging vertices u and v (call this vertex \(v_{merge}\)). Note that \(c_s(\overrightarrow{G}_{m,n}) = 1\) as Player 1 can place one cop on \(v_{merge}\) and capture the robber in one move if it is in \(\overrightarrow{A}_n\) or capture the robber in a finite number of moves if it is in \(\overrightarrow{B}_m\).
On the other hand, \(c_n(\overrightarrow{G}_{m,n})= n+1\), as Player 1 must keep a cop on each source to win, and since \(\overrightarrow{B}_m\) is a directed acyclic graph, one of the cops reaches \(v_{merge}\) and then captures the robber in \(\overrightarrow{B}_m\). Also, \(c_w(\overrightarrow{G}_{m,n}) \ge m+n+1\) as Player 1 needs to place \(n+1\) cops at sources in \(\overrightarrow{A}_n\) and it needs at least as many cops as the cop number of \(B_m\). \(\square \)
We end this section with some general notations and terminologies. The out-degree of v is \(d^+(v) = |N^+(v)|\) and its in-degree is \(d^-(v) = |N^-(v)|\). Let \(N^+[v] = N^+(v) \cup \{v\}\) denote the closed out-neighbourhood of v.
In the rest of this article, we refer to the robber as \(\mathcal {R}\); and to the cop, only in case of cop-win graphs, as \(\mathcal {C}\).
If a cop moves to an in-neighbour of the robber \(\mathcal {R}\), then we say that the cop attacks the robber. The robber is on a safe vertex from a cop if it cannot be captured by the cop in the next turn of Player 1. The robber evades capture if every time the cop attacks it, \(\mathcal {R}\) can move to a safe vertex.
3 Normal Cop Model
In the context of cops and robbers on oriented graphs, the weakly connected case reduces to solving the strongly connected case [9]. Hence it suffices to consider strongly connected oriented graphs. We begin by constructing strongly connected oriented graphs with arbitrarily high normal cop number and girth (length of a smallest cycle in the graph).
Theorem 1
Given any \(g \ge 5\) and \(c \ge 3\), there exists a strongly connected oriented graph \(\overrightarrow{G}_{g, c}\) with girth at least g having \(c_n(\overrightarrow{G}_{g,c}) \ge c+1\).
Proof
We borrow a construction to form regular expander graphs with high girth [18]. For sake of completeness, we present their complete construction. (Also see [2].) Let G be a simple graph and let L be a set. Define the graph \(G^L\) to be a L-lift of G if \(V(G^L)=V(G) \times L\), and for every edge \(uv \in E(G)\), the sets \(F_u = \{(u, l_i)\}_{l_i \in L}\) and \(F_v = \{(v, l_i)\}_{l_i \in L}\) induce a perfect matching in \(G^L\). Here G is the base graph and \(G^L\) depends on the matching between \(F_u\) and \(F_v\) assigned to each edge uv. Observe that the lifts of \(k-\)regular graphs are also \(k-\)regular. From Amit and Nilial [2], it follows that there are lifts of G which are \(\delta -\)connected for \(\delta \ge 3\), where \(\delta \) is the minimum degree of G. For path \(u-v-\cdots -w\) in G, \(G^L\) will have a unique path \((u,l_{i_1})-(v,l_{i_2})-\cdots -(w,l_{i_k})\), for some \(l_{i_1},l_{i_2},\ldots ,l_{i_k} \in L\). The path \(u-v-\cdots -w\) is called as the projection of \((u,l_{i_1})-(v,l_{i_2})-\cdots -(w,l_{i_k})\).
Now consider a graph G with a fixed ordering \(\pi \) of \(m=|E(G)|\) edges, and let \(L = \{0,1\}^m\), that is, the set of all possible m-tuples of 0’s and 1’s. For \(u,v \in V(G)\) and \(l_i,l_j \in L\), we connect \((u,l_i)\) with \((v,l_j)\) in \(G^L\) if \(uv \in E(G)\) and \(l_i\) and \(l_j\) differ only at the index of edge uv in the ordering \(\pi \). So \((u,l_i)\) is adjacent to \((v,l_j)\) and \((u,l_j)\) is adjacent to \((v,l_i)\). Hence for edge \(uv \in E(G)\), the sets \(F_u (= \{(u, l_i)\}_{l_i \in L})\) and \(F_v (= \{(v, l_i)\}_{l_i \in L})\) induce a perfect matching in \(G^L\). Thus \(G^L\) is a \(L-\)lift of G.
Now we pick a shortest cycle \(C_0\) in \(G^L\). Its projection in G is also a cycle C. We claim that for every edge \(uv \in C\) there are at least two edges in \(C_0\) between \(F_u\) and \(F_v\). Start at point \((u,l_i)\) of \(C_0\). Let the next vertex in \(C_0\) be \((v,l_j)\); so \(l_i\) and \(l_j\) differ only at the index of uv in \(\pi \). Now to reach \((u,l_i)\) we need to flip the value at the index of uv in \(\pi \). This happens only if we traverse uv once again. So \(|C_0| \ge 2|C|\). Hence girth of \(G^L\) is at least twice the girth of G.
To construct the oriented graph with arbitrarily high cop number and girth, do the following. Take a \(K_{2c+1}\) and go on applying the above-mentioned lift construction repeatedly until the girth is at least g. The resulting graph \(G_{g,c}\) is Eulerian as degree of v in G is even and is the same as the degree of \((v,l_i)\) in \(G_{g,c}\). Make the Eulerian circuit a directed circuit by assigning orientations to the edges. This results in a strongly connected oriented graph with girth at least g. Observe that the out-degree of each vertex is c. Thus its normal cop number is at least \(c + 1\) as we know that a strongly connected oriented graph with girth at least 5 have normal cop number \(c_n(\overrightarrow{G}) \ge \delta ^+(\overrightarrow{G}) + 1\), where \(\delta ^+(\overrightarrow{G})\) is the minimum out-degree of \(\overrightarrow{G}\) [21]. \(\square \)
Darlington et al. [6] characterized cop-win oriented paths and trees in the normal cop model. We are also going to do so for some other families of oriented graphs.
A transitive-triangle-free oriented graph is an oriented graph with no transitive triangles. The following theorem characterizes cop-win transitive-triangle-free oriented graphs, a superclass of triangle-free oriented graphs.
Proposition 3
A transitive-triangle-free oriented graph \(\overrightarrow{G}\) is cop-win if and only if it is a directed acyclic graph with one source.
Proof
Observe that any directed acyclic graph with one source is cop-win and that every cop-win oriented graph has exactly one source. So it suffices to prove that if a transitive triangle-free oriented graph \(\overrightarrow{G}\) is cop-win, then it is a directed acyclic graph.
Suppose \(\overrightarrow{G}\) has a directed cycleFootnote 3 \(\overrightarrow{C}\) on at least 3 vertices. We will now give a strategy for the robber \(\mathcal {R}\) to escape. Note that the cop \(\mathcal {C}\) must be placed at the source initially, as otherwise Player 2 places \(\mathcal {R}\) on the source and wins. \(\mathcal {R}\) initially places himself at some safe vertex of \(\overrightarrow{C}\). Such a vertex exists, as any vertex in \(\overrightarrow{G}\) cannot dominate two consecutive vertices in \(\overrightarrow{C}\), else a transitive triangle is created. \(\mathcal {R}\) moves to the next vertex in \(\overrightarrow{C}\) whenever \(\mathcal {R}\) lies in the out-neighbour of \(\mathcal {C}\). Whenever \(\mathcal {C}\) attacks \(\mathcal {R}\), the robber moves to the next vertex in \(\overrightarrow{C}\) and evades the attack. Since \(\overrightarrow{C}\) is a directed cycle, \(\mathcal {C}\) cannot capture \(\mathcal {R}\). This contradicts that \(\overrightarrow{G}\) is a cop-win graph; hence the result. \(\square \)
As bipartite graphs are triangle-free, we have the following corollary.
Corollary 1
An oriented bipartite graph is cop-win if and only if it is a directed acyclic graph with one source.
Next, we characterize cop-win oriented outerplanar graphs.
Proposition 4
An oriented outerplanar graph \(\overrightarrow{G}\) is cop-win if and only if it is a directed acyclic graph with one source.
Proof
The ‘if’ part is obvious.
For proving the ‘only if’ part, first note that a graph cannot be cop-win if it has no source or at least two sources. Thus suppose that there exists an oriented outerplanar cop-win graph \(\overrightarrow{G}\) containing a directed cycle \(\overrightarrow{C}\) with exactly one source v. The cop \(\mathcal {C}\) must be initially placed on the source v.
Note that at most two vertices of \(\overrightarrow{C}\) can have a path made up of vertices from outside \(\overrightarrow{C}\) connecting v in order to avoid a \(K_4\)-minor. So there is at least one safe vertex u in \(\overrightarrow{C}\) such that any directed path connecting v to u must go through some vertex of \(\overrightarrow{C}\) other than u. Thus if the robber \(\mathcal {R}\) places itself on u and does not move until \(\mathcal {C}\) comes on a vertex of \(\overrightarrow{C}\), it cannot be captured.
If \(\mathcal {C}\) is on a vertex of \(\overrightarrow{C}\) and starts moving towards \(\mathcal {R}\) following the direction of the arcs of \(\overrightarrow{C}\), then \(\mathcal {R}\) also moves forward and evades \(\mathcal {C}\).
Thus \(\mathcal {C}\) must go out of \(\overrightarrow{C}\) in order to try and capture \(\mathcal {R}\). The moment \(\mathcal {C}\) goes out to some vertex w outside \(\overrightarrow{C}\), \(\mathcal {R}\) either is on a safe vertex or it can move to a safe vertex on \(\overrightarrow{C}\) in its next move as w can be adjacent to at most two vertices of \(\overrightarrow{C}\) in order to avoid a \(K_4\)-minor.
This brings us to a situation similar to the initial situation. Thus, the robber will always evade the cop, a contradiction. \(\square \)
4 Strong Cop Model
The strong cop number of an oriented graph is upper bounded by cop number in classical version of the game on the underlying undirected graph. We begin this section by finding strong cop number of planar graphs, outerplanar graphs, and series-parallel graphs. But first, we find a lower bound of the strong cop number of a specific oriented graph.
Construction: Given an undirected graph G on vertex set \(\{v_1,\ldots ,v_n\}\), we form an oriented graph \(\overrightarrow{H}\) from G by replacing each edge \(v_iv_j\) in G by a directed 4-cycle \(v_iu_{ij}v_ju_{ji}v_i\). We have the following lemma relating strong cop number of \(\overrightarrow{H}\) with cop number of G. Here c(G) is the cop number of the undirected graph G.
Lemma 1
\(c_s(\overrightarrow{H})\ge c(G)\).
Proof
Each vertex \(v_i\in V(G)\) corresponds to the set \(N^+[v_i]\) in \(V(\overrightarrow{H})\). Note the sets \(N^+[v_i]\) partition \(V(\overrightarrow{H})\). For each \(v\in N^+[v_i]\) in \(\overrightarrow{H}\), define its image in G as \(I(v)=v_i\). We know that \(c_s(\overrightarrow{H})\) cops have a strategy to capture the robber \(\mathcal {R}\) in \(\overrightarrow{H}\). We will show that \(c_s(\overrightarrow{H})\) cops have a winning strategy in G.
We use the winning strategy of \(c_s(\overrightarrow{H})\) cops in \(\overrightarrow{H}\) to obtain a winning strategy in G. As the game is played in G, we also (sort of) play it in \(\overrightarrow{H}\) by following \(\mathcal {R}\)’s move in G. The move of the cops in \(\overrightarrow{H}\) following the winning strategy is translated to G using the images. This procedure is done as follows.
Initially in G, place the cops and then \(\mathcal {R}\) is placed. In \(\overrightarrow{H}\), place the cops and \(\mathcal {R}\) at the vertices with same labels as in the occupied vertices in G. The cops in G pass their first move and then \(\mathcal {R}\) moves or passes its move. For each move of \(\mathcal {R}\) in G (say from \(v_i\) to \(v_j\)), we play two turns in \(\overrightarrow{H}\): in the first turn \(\mathcal {R}\) moves from \(v_i\) to \(u_{ij}\) and then to \(v_j\) in the second turn. In each of these two turns in \(\overrightarrow{H}\), the cops move following their winning strategy. After two turns in \(\overrightarrow{H}\), the cops in G move to the images of cops in \(\overrightarrow{H}\) (this is always possible). Following the winning strategy, when \(\mathcal {R}\) is captured in \(\overrightarrow{H}\), \(\mathcal {R}\) is also captured in G. \(\square \)
As a result of Lemma 1, we find the strong cop number of oriented planar graphs and then form oriented graphs with arbitrarily high strong cop number.
Corollary 2
The strong cop number of the family of oriented planar graphs is three.
Proof
Recall that the strong cop number of an oriented graph is upper bounded by cop number in classical version of the game on the underlying undirected graph. The cop number of planar graphs is three [1]. Apply the construction used in Lemma 1 to a planar graph with cop number 3 to get an oriented planar graph with \(c_s \ge 3\) (the construction used in Lemma 1 maintains planarity). \(\square \)
Corollary 3
For every \(k\in \mathbb {N}\), there exists an oriented graph \(\overrightarrow{H}\) such that \(c_s(\overrightarrow{H})\ge k\).
Proof
Apply the construction used in Lemma 1 to a graph with cop number at least k (whose existence is given in [1]). \(\square \)
Next, we find strong cop numbers of the family of oriented outerplanar and series-parallel graphs.
Theorem 2
The strong cop number of the family of oriented outerplanar graphs is two.
Proof
The cop number of outerplanar graphs in the classical game on undirected graphs is two [5]. Hence it suffices to construct an oriented graph which is not strong cop-win.
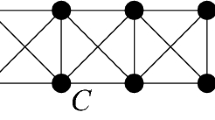
Consider an outerplanar graph on 47 vertices formed by joining 2 copies of the following biconnected outerplanar graph at a vertex, say \(v_0\). Take a cycle \(C_1\) (see Fig. 1) on \(v_0,v_1,\ldots , v_{23}\) arranged in counterclockwise manner with arcs \(v_iv_{i-1}\) and \(v_{2i}v_{2i+2}\) (under modulo 24). Let the other copy \(C_2\) of the cycle be on vertices \(v_0=u_0,u_1,\ldots , u_{23}\) with arcs \(u_iu_{i-1}\) and \(u_{2i}u_{2i+2}\) (under modulo 24). The arcs of the form \(v_iv_{i-1}\) are called cycle arcs and the arcs of the form \(v_{2i}v_{2i+2}\) are called chord arcs. The vertices \(v_{i}\) and \(u_{j}\) with even indices are called even vertices and with odd indices are called odd vertices.

The biconnected outerplanar graph \(C_1\).
If the cop \(\mathcal {C}\) is placed at \(v_0\), then robber \(\mathcal {R}\) enters at \(v_4\); else \(\mathcal {R}\) starts at \(v_4\) or \(u_4\) depending on whether \(\mathcal {C}\) starts at \(C_2\) or \(C_1\) respectively. In the latter case (that is \(\mathcal {C}\) is not placed at \(v_0\)), \(\mathcal {R}\) passes his moves until \(\mathcal {C}\) is at \(v_0\) (in order to catch \(\mathcal {R}\), \(\mathcal {C}\) has to go through \(v_0\)). Once \(\mathcal {C}\) reaches \(v_0\), \(\mathcal {R}\) passes his move once more; reducing this case to the former case. Hence, without loss of generality, assume that \(\mathcal {C}\) and \(\mathcal {R}\) start at \(v_0\) and \(v_4\) respectively.
In the rest of this proof, we show that if \(\mathcal {C}\) (at \(v_0\)) tries to capture \(\mathcal {R}\) (at \(v_4\)), then \(\mathcal {R}\) reaches the initial configuration (\(\mathcal {C}\) at \(v_0\) and \(\mathcal {R}\) at \(v_4\)) or its equivalent configuration (\(\mathcal {C}\) at \(v_0\) and \(\mathcal {R}\) at \(u_4\)) without being captured. Precisely, we show that if \(\mathcal {C}\) pursues \(\mathcal {R}\), then \(\mathcal {R}\) reaches \(v_0\) two turns before \(\mathcal {C}\). So after two more turns \(\mathcal {R}\) can be at \(u_4\) or \(v_4\) depending on whether \(\mathcal {C}\) is in \(C_1\) or \(C_2\) respectively; and then passes its moves until \(\mathcal {C}\) is at \(v_0\). So \(\mathcal {R}\) evades capture indefinitely; thereby proving that the graph constructed above is not strong cop-win.
To simplify our presentation, we use the following notations. Let variable \(X=\{\) \(\mathcal {C}\), \(\mathcal {R}\)\(\}\); variables U, V denote two adjacent vertices; and symbol \(*\) denote \(\circlearrowright \) for clockwise or \(\circlearrowleft \) for counter-clockwise. Read \(X(U*V)\) as “X moves from U to V in \(*\) sense”. Read \(X(*)\) as “X moves in \(*\) sense to an adjacent vertex”. Let \(d_c\) denote the distance between \(\mathcal {C}\) and \(\mathcal {R}\) at the given instant in the underlying undirected graph. Note that \(\mathcal {R}\)\((*)\) results in a fixed final position, where as \(\mathcal {C}\)\((*)\) results in two possible final positions.
\(\mathcal {R}\) moves according to the following rules. All operations are performed under modulo 24.
-
R0: At any turn, if \(\mathcal {C}\) passes its move then \(\mathcal {R}\) passes its move.
-
R1: For \(i=1\) to 7, \(\mathcal {R}\)\((v_{2i}\circlearrowleft v_{2i+2})\) only if \(\mathcal {C}\)\((v_{2i-4}\circlearrowleft v_{2i-2})\) or \(\mathcal {C}\)\((v_{2i-3}\circlearrowleft v_{2i-2})\); else it passes its move.
-
R2: For \(i=8\) to 11, \(\mathcal {R}\)\((v_{2i}\circlearrowleft v_{2i+2})\) irrespective of \(\mathcal {C}\)’s move.
-
R3: If \(\mathcal {R}\) is at an even vertex \(v_{2i}\), for \(i\le 7\), and \(\mathcal {C}(\circlearrowright )\), then
-
\(\mathcal {R}\)\((\circlearrowright )\), if \(d_c\) increases to at least 4.
-
\(\mathcal {R}\) passes its move, if \(d_c\) increases but remains less than 4.
-
\(\mathcal {R}\)\((\circlearrowright )\), if \(d_c\) decreases.
-
-
R4: If \(\mathcal {R}\) is at an odd vertex \(v_{2i+1}\), for \(i < 7\), then \(\mathcal {R}\)\((\circlearrowright )\) irrespective of \(\mathcal {C}\)’s move.
We claim that \(\mathcal {R}\) reaches \(v_0\) at least two turns before \(\mathcal {C}\). Once \(\mathcal {R}\) is at \(v_{14}\) and \(\mathcal {C}\)\((v_{10}\circlearrowleft ~v_{12})\), then \(\mathcal {R}\) keeps on moving counter-clockwise and reaches \(v_0\) at least two turns before \(\mathcal {C}\). However if \(\mathcal {C}\)\((\circlearrowright )\) and if \(d_c\) increases to at least 4, then \(\mathcal {R}\)\((\circlearrowright )\), else if \(d_c<4\) then \(\mathcal {R}\) passes its move. The restriction \(d_c\ge 4\) ensures that if \(\mathcal {C}\) moves counter-clockwise then \(\mathcal {R}\) can safely move clockwise to the next even vertex. For subsequent steps, if \(\mathcal {C}\)\((\circlearrowright )\) and \(\mathcal {R}\) is on an even vertex \(v_{2i}\), for \(i=1\) to 7, then \(\mathcal {R}\)\((\circlearrowright )\), provided the restrictions in R3 are met. In any intermediate step if \(\mathcal {C}\)\((\circlearrowleft )\), then \(\mathcal {R}\)\((\circlearrowright )\) if it is at an odd vertex; else \(\mathcal {R}\)\((\circlearrowleft )\) or \(\mathcal {R}\) passes its move depending on whether \(\mathcal {C}\) attacks it or not. In such a case \(\mathcal {R}\) always stays at least two moves away from \(\mathcal {C}\) and hence evades capture.
The only way left for \(\mathcal {C}\) to capture \(\mathcal {R}\) is if \(\mathcal {C}\) continues moving counter-clockwise along the chord arcs and then tries to capture \(\mathcal {R}\) which now moves counter-clockwise along the cycle arcs. However in such a case also it is easy to see that \(\mathcal {R}\) reaches \(v_0\) at least two moves before \(\mathcal {C}\). Hence, either \(\mathcal {R}\) evades capture indefinitely or reaches the initial or its equivalent configuration; which implies that \(\mathcal {R}\) is never captured. Hence the constructed graph is not strong cop-win. \(\square \)
It is known that the cop number of series-parallel graphs in the classical game on undirected graphs is two [24]. Since outerplanar graphs are also series-parallel graphs, we have the following corollary.
Corollary 4
The strong cop number of oriented series-parallel graphs is two.
As mentioned earlier all the oriented graphs whose underlying graphs are cop-win graphs in the classical (undirected graph) version are strong cop-win. Next, we find some families of oriented graphs which are strong cop-win but whose underlying undirected graphs are not cop-win in the classical version. We begin with a specific class of outerplanar graphs.
We need the following definitions. For a plane graph G (i.e. the planar embedding of G), its dual graph has vertices that represent faces of G and edges represent the adjacency of faces in G separated by an edge. The weak dual of G is the induced subgraph of the dual graph whose vertices correspond to the bounded faces of G.
Theorem 3
Oriented outerplanar graphs whose weak dual is a collection of paths are strong cop-win.
Proof
Let G be an outerplanar graph on n vertices, whose weak dual is a collection of paths and \(\overrightarrow{G}\) denote the oriented outerplanar graph on G. We call the edges in the outer face of G as cycle edges. For a cycle C in \(\overrightarrow{G}\), image \(I_C(\mathcal {R})\) of the robber \(\mathcal {R}\), is the set of vertices in C that are closest to \(\mathcal {R}\).
First we claim that \(|I_C(\mathcal {R})|\le 2\). Suppose \(|I_C(\mathcal {R})|> 2\); then let \(u_1,u_2,u_3\in I_C(\mathcal {R})\) be three vertices arranged in a cyclic order in C. Since distance from \(\mathcal {R}\) to \(u_1,u_2,u_3\) are same, the paths from the robber to \(u_i\) does not contain \(u_j\), for \(i\ne j\) and \(i,j\le 3\). So \(u_2\) does not lie in the outer face; a contradiction.
Furthermore, if \(|I_C(\mathcal {R})|= \{u_1,u_2\}\), then \(u_1\) and \(u_2\) are adjacent, else the internal vertices on a \(u_1u_2\) path does not lie in the outer face. If \(\mathcal {R}\) is in the cycle then \(I_C(\mathcal {R})\) contains the vertex occupied by \(\mathcal {R}\). So if \(|I_C(\mathcal {R})|=2\), then \(\mathcal {R}\) does not lie in the cycle C.
Now we prove the theorem by induction on the order of G. The base case is easy to verify. Now assume every outerplanar graph of order less than n, whose weak dual is a collection of paths is strong cop-win.
Now consider an outerplanar graph \(\overrightarrow{G}\) of order n, whose weak dual is a collection of paths. Select a cycle C in \(\overrightarrow{G}\) and place the cop \(\mathcal {C}\) in some vertex of C. After \(\mathcal {R}\) is placed in \(\overrightarrow{G}\), we find \(I_C(\mathcal {R})\) and capture it in subsequent moves. If \(|I_C(\mathcal {R})|=2\), then we capture any one of them. This can always be done in a cycle that is not directed. If C is directed, \(\mathcal {C}\) moves against the orientations. So a vertex in \(I_C(\mathcal {R})\) can be captured by \(\mathcal {C}\). If \(\mathcal {R}\) is in the cycle then it is captured. If \(|I_C(\mathcal {R})|=2\), then \(\mathcal {R}\) is not in the cycle when some vertex of \(I_C(\mathcal {R})\) is captured by \(\mathcal {C}\). Once \(\mathcal {C}\) captures a vertex in \(I_C(\mathcal {R})\), the robber cannot enter C. So \(\mathcal {R}\) is now trapped in one component of \(\overrightarrow{G}\) obtained after deleting the cycle edges of C. By our inductive hypothesis, \(\mathcal {R}\) can be captured in this component. Hence oriented outerplanar graphs whose weak dual is a collection of paths are cop-win in the strong cop model. \(\square \)
Our next class of strong cop-win graphs are oriented grids.
Theorem 4
Oriented grids are strong cop-win.
Outline of the Proof. Fix a \(m\times n\) grid with points \(\{(i,j)|0\le i\le m-1, 0\le j\le n-1\}\). The cop \(\mathcal {C}\) starts at (0, 0). If the robber \(\mathcal {R}\) is at \((x_r,y_r)\), then define the vertices \((x_r\pm 1,y_r\pm 1)\) (when they exist) as guard positions. The reader can check that \(\mathcal {C}\) can guard \(\mathcal {R}\) at \((x_r-1,y_r-1)\) (see [7, Step 1 in Thm. 1]). So \(\mathcal {R}\) can only move either up or to the right if the orientations allow (else \(\mathcal {R}\) is caught). Note that once it reaches \((m-1,n-1)\), it gets captured. If \(\mathcal {R}\) stays stagnant at a vertex, then \(\mathcal {C}\) can force it to move. Although the guard position is lost, after a few steps \(\mathcal {C}\) can regain the guard position (or capture \(\mathcal {R}\)). So the Y-coordinate of \(\mathcal {R}\) gradually increases. Eventually \(\mathcal {R}\) ends up at \((m-1,n-1)\) or gets captured. \(\square \)
5 Weak Cop Model
A vertex u in a directed graph is said to be a corner vertex, if there exists a vertex v such that \(N^+[u]\cup N^-(u) \subseteq N^+[v]\) where \(N^{\alpha }[v] = N^{\alpha }(v) \cup \{v\}\) for each \(\alpha \in \{+,-\}\). We also say that v dominates u.
Now we characterize all cop-win directed graphs in this model, which is adapted from the cop-win characterization of undirected graphs (whose proof follows from a couple of lemmas).
Theorem 5
A directed graph is cop-win in the weak cop model if and only if by successively removing corner vertices, it can be reduced to a single vertex.
Lemma 2
If a directed graph has no corner vertex, then it is not weak cop-win.
Proof
Let \(\overrightarrow{G}\) have no corner vertex. The robber \(\mathcal {R}\) starts from a vertex that is not an out-neighbour of the cop \(\mathcal {C}\). The robber does not move unless \(\mathcal {C}\) attacks it. Whenever \(\mathcal {R}\) is under attack, it can move to a vertex that in not an out-neighbour of \(\mathcal {C}\) (as there are no corner vertices in \(\overrightarrow{G}\)). Hence \(\mathcal {R}\) never gets caught. \(\square \)
Lemma 3
A directed graph \(\overrightarrow{G}\) with a corner u is weak cop-win if and only if \({\overrightarrow{H}=\overrightarrow{G}\setminus \{u\}}\) is weak cop-win.
Proof
Let vertex v dominate u in G. Suppose \(\overrightarrow{H}\) is cop-win. Define the image \(I_{\mathcal {R}}\) of the robber \(\mathcal {R}\) as follows: \(I_{\mathcal {R}}(u)=v\) and \(I_{\mathcal {R}}(x)=x\) for all \(x\in V(\overrightarrow{H})\). So \(I_{\mathcal {R}}\) is restricted to \(\overrightarrow{H}\) and it can be captured by the cop \(\mathcal {C}\). If \(\mathcal {R}\) is not on u, then it is captured. If \(\mathcal {R}\) is on u, then \(\mathcal {C}\) is on v and will capture \(\mathcal {R}\) in its next move.
Suppose, on the other hand, \(\overrightarrow{H}\) is not weak cop-win. Define the image \(I_{\mathcal {C}}\) of the cop \(\mathcal {C}\) as follows: \(I_{\mathcal {C}}(u)=v\) and \(I_{\mathcal {C}}(x)=x\) for all \(x\in V(\overrightarrow{H})\). So \(I_{\mathcal {C}}\) is restricted to \(\overrightarrow{H}\) and \(\mathcal {R}\) has a winning strategy against \(I_{\mathcal {C}}\). If \(\mathcal {C}\) is not on u, then \(\mathcal {R}\) follows its winning strategy and does not get captured in \(\mathcal {C}\)’s next move. If \(\mathcal {C}\) is on u, then \(\mathcal {R}\) follows its winning strategy assuming \(\mathcal {C}\) is on \(I_{\mathcal {C}}(u)=v\). Since \(\mathcal {R}\) has a winning strategy against \(\mathcal {C}\) if \(\mathcal {C}\) were at v instead, \(\mathcal {R}\) does not get captured in \(\mathcal {C}\)’s next move (as v dominates u). So \(\mathcal {R}\) evades capture; hence \(\overrightarrow{G}\) is not weak cop-win. \(\square \)
Finally, we are ready to prove Theorem 5.
Proof of Theorem 5. Lemma 3 implies that upon removing the corner vertices, the weak cop-win property of the graph remains the same. Now remove all possible corner vertices successively in the directed graph. If we end up with a single vertex, then it is weak cop-win. Otherwise we end up with some other graph that has no corner vertices, Lemma 2 implies that it is not weak cop-win. \(\square \)
Notes
- 1.
GRASTA 2014: http://www-sop.inria.fr/coati/events/grasta2014/.
- 2.
An oriented graph is a directed graph without 2-cycles i.e. each edge has a direction. For the purposes of this article, they are the same.
- 3.
We use the term directed cycle instead of oriented cycle as it is commonly used.
References
Aigner, M., Fromme, M.: A game of cops and robbers. Discret. Appl. Math. 8, 1–12 (1984)
Amit, A., Linial, N.: Random graph coverings I: general theory and graph connectivity. Combinatorica, 22(1), 1–18 (2002)
Alspach, B.: Sweeping and searching in graphs: a brief survey. Matematiche 59, 5–37 (2006)
Bonato, A., Nowakowski, R.: The Game of Cops and Robbers on Graphs. American Mathematical Society, Providence (2011)
Clarke, N.E.: Constrained cops and robber. Ph.D. thesis, Dalhousie University (2002)
Darlington, E., Gibbons, C., Guy, K., Hauswald, J.: Cops and robbers on oriented graphs. Rose-Hulman Undergrad. Math. J. 17(1), Article 14 (2016)
Das, S., Gahlawat, H.: Variations of cops and robbers game on grids. In: Panda, B.S., Goswami, P.P. (eds.) CALDAM 2018. LNCS, vol. 10743, pp. 249–259. Springer, Cham (2018). https://doi.org/10.1007/978-3-319-74180-2_21
Fomin, F., Fraigniaud, P., Nisse, N., Thilikos, D.M.: Report on GRASTA 2014, pp. 14 (hal-01084230) (2014)
Frieze, A., Krivelevich, M., Loh, P.: Variations on cops and robbers. J. Graph Theory 69, 383–402 (2012)
Goldstein, A.S., Reingold, E.M.: The complexity of pursuit on a graph. Theoret. Comput. Sci. 143, 93–112 (1995)
Hahn, G., MacGillivray, G.: A note on \(k\)-cop, \(l\)-robber games on graphs. Discret. Math. 306, 2492–2497 (2006). Creation and Recreation: A Tribute to the Memory of Claude Berge
Hamidoune, Y.O.: On a pursuit game on Cayley digraphs. Eur. J. Comb. 8, 289–295 (1987)
Hosseini, S.A., Mohar, B.: Game of cops and robbers in oriented quotients of the integer grid. Discret. Math. 341, 439–450 (2018)
Hosseini, S.A.: Game of Cops and Robbers on Eulerian Digraphs. Ph.D. thesis, Simon Fraser University (2018)
Isaza, A., Lu, J., Bulitko, V., Greiner, R.: A cover-based approach to multi-agent moving target pursuit. In: Proceedings of The 4th Conference on Artificial Intelligence and Interactive Digital Entertainment (2008)
Isler, V., Kannan, S., Khanna, S.: Randomized pursuit-evasion with local visibility. SIAM J. Discret. Math. 1, 26–41 (2006)
Khatri, D., et al.: A study of cops and robbers in oriented graphs. ArXiv e-prints, arXiv:1811.06155 (2019)
Kilbane, J.: Notes on Graphs of Large Girth
Kinnersley, W.B.: Cops and robbers is EXPTIME-complete. J. Comb. Theory Ser. B 111, 201–220 (2015)
Kinnersley, W.B.: Bounds on the length of a game of cops and robbers. Discret. Math. 341, 2508–2518 (2018)
Loh, P., Oh, S.: Cops and robbers on planar directed graphs. ArXiv e-prints, arXiv:1507.01023 (2015)
Nowakowski, R., Winkler, P.: Vertex-to-vertex pursuit in a graph. Discret. Math. 43, 253–259 (1983)
Seymour, P.D., Thomas, R.: Graph searching and a min-max theorem for tree-width. J. Comb. Theory Ser. B 58, 22–33 (1993)
Theis, D.O.: The cops and robber game on series-parallel graphs. ArXiv e-prints, arXiv:0712.2908 (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Das, S., Gahlawat, H., Sahoo, U.K., Sen, S. (2019). Cops and Robber on Some Families of Oriented Graphs. In: Colbourn, C., Grossi, R., Pisanti, N. (eds) Combinatorial Algorithms. IWOCA 2019. Lecture Notes in Computer Science(), vol 11638. Springer, Cham. https://doi.org/10.1007/978-3-030-25005-8_16
Download citation
DOI: https://doi.org/10.1007/978-3-030-25005-8_16
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-25004-1
Online ISBN: 978-3-030-25005-8
eBook Packages: Computer ScienceComputer Science (R0)