
Abstract
We present new physiological data on bone conduction hearing from cadaveric temporal bone ears of an elephant. We discuss the results in the context of the elephant’s ability to detect and interpret ground-borne vibrations as signals and compare with similar measurements in a human cadaveric temporal bone ear. Large ossicles are potentially indicative of superior bone conduction hearing, and elephant ossicles are the largest among terrestrial mammals. Using 3D laser vibrometry, we measured stapes velocity in each x, y, z planes and the promontory velocity to determine relative velocity as an indication of vibrational input to the cochlea via the footplate. Since elephant ossicles are at least seven times the mass of human ossicles, we compare the sensitivity of both species to vibrations in the frequency range of 8–10,000 Hz and report that elephants have up to an order of magnitude greater sensitivity below 200 Hz, indicating a heightened sensitivity to bone conduction hearing in comparison to humans.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
The vibration sense is employed by a wide range of taxa as a mechanism of prey detection, predator warning and avoidance, habitat sensing, as well as communication (Hill 2008). Understanding the use of vibrations in communication is an expanding field of research within animal communication.
In small mammals, vibrational signaling and detection is described in a number of small rodents, including the blind mole rat (Rado et al. 1987; Nevo et al. 1991), the cape mole rat (Narins et al. 1992), and the kangaroo rat (Randall 1989, 1997). The golden mole uses a head dipping behavior to navigate the seismic environment and orient toward prey (Narins et al. 1997). Foot drumming in the context of deterring predators or in defense has been described in kangaroo rats, rabbits, skunks, and other small mammals (Randall 2001). The foot thumping behavior of kangaroos (Gregory et al. 1986), body slams of elephant seals (Shipley et al. 1992), and trunk banging in the elephant (for review see O’Connell-Rodwell et al. 2001) indicate that these larger species also make use of percussive vibrations as a threat. Although the propagation of percussive signals by these large mammals has not been measured, a human can generate vibrations by jumping that are measurable at a distance of 1 km (O’Connell-Rodwell et al. 2001; Arnason et al. 2002), showing that large mammal percussive vibrational signals have the potential of propagating long distances. For example, an elephant mock charge ends in a foot-stomping behavior that generates vibrations with energy that could propagate at least as far as sound and models suggest much further (O’Connell-Rodwell et al. 2000a).
In this chapter, we report preliminary physiological measurements on the elephant’s sensitivity to bone conduction in the context of vibrational communication. We then compare the sensitivity of elephants to bone conduction relative to humans—a terrestrial large mammal where bone conduction has been a focus of clinical and scientific study, and whose ossicles are only a seventh the size. We also discuss the implications of bone conducted hearing in light of the elephant’s ability to detect and interpret ground-borne vibrations as meaningful signals. See O’Connell-Rodwell (2007) and O’Connell-Rodwell and Wood (2010) for a broader, more thorough review of elephant communication via ground vibrations.
1.1 Overview of Vibrational Communication in Elephants
Elephant low-frequency (20 Hz) rumble vocalizations are generated at such high amplitudes (on the order of 90–100 decibels SPL at 5 m) that they couple with the ground through the feet and propagate along the surface of the earth in the form of Rayleigh waves, maintaining a separate velocity than their airborne counterparts (O’Connell-Rodwell et al. 2000a). These substrate-borne vibrational cues have the same temporal and frequency structure as the simultaneously propagated bioacoustics signal that propagates in the air, but the distance travelled, and propagation velocities of these signals depend on signal frequency and energy level, geological conditions of the substrate, and frequency-dependent absorption (see O’Connell-Rodwell 2007; O’Connell-Rodwell and Wood 2010 for reviews).
Elephants detect and respond appropriately to seismically transmitted antipredator vocalizations as measured by an increase in vigilance, freezing behavior, a change in orientation, and a decrease in time spent at the waterhole upon presentation of the signal (O’Connell-Rodwell et al. 2006). When played back through the air, these same vocalizations elicit an immediate flight response (O’Connell-Rodwell et al. 2000b). Elephants discriminate between familiar and unfamiliar callers through the ground, demonstrating the ability to distinguish subtle differences in frequency modulation between individual callers (O’Connell-Rodwell et al. 2007).
The interactive pattern of vocalizations that occurs during the “let’s go” rumble volley during the time when a family group, or bonded group of males, leaves the waterhole results in a longer repeated signal that would facilitate detection at greater distances than a vocalization generated in isolation. These signals are three times the length of single vocalization (9 vs. 3 s), thus increasing the signal-to-noise level and reducing the noise floor to improve detection both in the air and in the ground (O’Connell-Rodwell et al. 2012).
2 Bone Conduction
2.1 Introduction
Elephants have two possible pathways for the detection and interpretation of vibrational signals, either through bone conduction to the cochlea, with processing in the auditory cortex, or through vibration-sensitive mechanoreceptors in their feet and trunk that are transmitted to the somatosensory cortex (O’Connell et al. 1999). Animals that use bone conduction to detect seismic signals have enlarged ossicles, the malleus being particularly hypertrophied, which facilitates independent oscillations of the middle ear bones relative to the skull due to inertia (Reuter et al. 1998). When vibrations transmit through the bone, they first couple with the ground via the feet and then travel up through the legs and shoulders and into the middle ear ossicles and cavity, then to the cochlea, or, in the case of some marine mammals and small rodents, straight through the skull, to the cochlea via the ossicles (Rado et al. 1998).
2.2 Anatomical Features Suited to Vibration Detection via Bone Conduction
The generation of low-frequency acoustic signals may be facilitated by the elephant’s large diaphragm, by a larynx with five rather than the nine bones present in most other mammals (Shoshani 1996) and an unusually large nasal cavity. In addition, all head bones of the African elephant’s skull are aerated by sinuses (van der Merwe et al. 1995) and except for the solid mandible, the cranium consists of inflated bones compartmentalized to form diploe (Shoshani 1996). These fatty deposits and aerated skull sinuses in the elephant may facilitate vibration detection.
A novel sphincter-like skeletal muscle surrounding the external auditory meatus of the elephant ear, described in a forthcoming paper from O’Connell-Rodwell and colleagues, contracts upon tactile stimulation, occluding the opening of the ear canal. This occlusion would serve to damp acoustic signals, facilitating better detection in the seismic environment. In addition, pressure builds up in a sealed air canal creating what is known as a “closed acoustic tube” that enhances bone conduction (Stenfelt et al. 2003). This anatomical feature, potentially a remnant of an aquatic ancestry, may facilitate acoustic reception of lower frequencies and/or a bone-conducted pathway for seismic detection.
2.3 Behaviors Indicative of Bone Conduction Vibration Detection
Behaviors facilitating bone conduction have been documented in a number of mammalian species, most notably, the blind mole rat exhibits “jaw-listening” behavior, where it places its jaw against a substrate to facilitate vibration detection (Rado et al. 1998). The golden mole, having the largest malleus relative to body size of any animal (Mason and Narins 2002), exhibits freezing and head dipping behavior to better couple the skull to the substrate (Narins et al. 1997).
Elephants also engage in a freezing behavior while detecting vibrational information, such that they lean forward, placing more weight on their larger front feet. Due to the unique graviportal structure of their forelimbs, leaning forward places the foot directly in line with the ear (O’Connell-Rodwell et al. 2006). The elephant, or group of elephants, then continues walking and then freezes again, often mid-stride. This periodic freezing behavior is very similar to the golden mole, with perhaps a similar navigational goal, whereby they may be able to localize the signal source and choose a direction based on information obtained during the freezing and assessment period (Fig. 13.1).

Elephant vibration detection posture. (a) Upon signal detection, an elephant appears to focus solely on somatosensory detection via receptors in the trunk. Ears are relaxed, indicating no assessment of the airborne environment. (b) Elephant vibration detection posture, where the elephant appears to be using both toenails and trunk to assess a ground-borne signal, its ears not fully extended. This posture suggests an assessment both via bone conduction through the toenails, as well as a somatosensory pathway through Pacinian corpuscles in the trunk. Other posture includes leaning forward on the front legs with ears flat, and sometimes one of the front feet is lifted off the ground (possibly for the purpose of triangulation or better coupling). If focused on an acoustic signal, an elephant holds its ears out and scans its head back and forth in the direction of the sound. Photo credits O’Connell and Rodwell
A recurring pattern during playback experiments is that elephants tend to position themselves perpendicular to the source of a seismically transmitted signal. Figure 13.2a–c depict still frames captured during a video recording of a male elephant in musth responding to an estrus call playback broadcast through the air and ground. This perpendicular positioning would create the greatest distance between the ears as receivers, rather than the feet. Positioning in order to obtain the greatest distance between receivers would facilitate localization, and being adjacent would provide a half-meter distance between ears, versus about 2.5 m between front and back feet if the elephant was positioned parallel to the source (O’Connell-Rodwell et al. 2000a). This pattern occurs despite the orientation of the elephant in relation to the signal source at the time of detection.

Video stills of an estrus call playback to a male elephant in musth. (a) After presentation of the estrus call, the male elephant in musth approaches the signal source and then passes it, walking away along the same compass direction, as if searching for the source in the distance. (b) Upon the second presentation of the signal, the elephant turns perpendicular to the signal source, freezing with ears flat to side and trunk on ground. (c) After spending time accessing the signal while positioned adjacent to the signal source, the elephant turns and faces the signal source directly. Photo credits O’Connell and Rodwell
There should not be directionality attributable to bone conduction hearing, as the ossicles in both ears would receive vibrations from the whole skull and thus should vibrate at the same time and with the same intensity. This differs from localization of an acoustic signal where the two middle ears in most mammals are isolated, and thus interaural time differences or phase differences at low frequencies and interaural level differences at high frequencies are detectable.
A direct connection between the two tympanic cavities is known only in two subterranean species, the talpid moles and most species of golden mole (Mason 2016). This feature is thought to improve low-frequency hearing and localization through the detection of pressure differences [similar to non-mammalian tetrapods (Christensen-Dalsgaard 2011)]. If the elephant had a direct connection between the two tympanic cavities, detection of low-frequency acoustic signals might be enhanced as it is in these other species, but the possibility of this anatomical feature playing a role in vibrational localization via bone conduction is yet to be determined.
Another noteworthy behavior during seismic detection (in isolation of acoustic detection) is that elephants seem to orientate along compass directions. Upon detection of a signal, some amount of time is spent freezing, leaning forward with a length of the trunk on the ground in a particular direction. A few minutes into the assessment, the elephant shifts about 45° and then resumes the seismic listening posture. This change of compass direction is done several times in at least three different orientations prior to a decision with regard to the direction of departure. This behavior is most often observed when a group of bonded males are making an assessment about a direction of departure, each orientating in a different compass direction at the same time (Fig. 13.3).

A group of bonded male elephants positioned in different compass directions, each one assessing both the air and the ground for environmental cues as well as possibly seismic information generated by other elephants as to which direction to head after drinking at the waterhole. Usually, the most dominant male decides on a direction and the rest follow him, most often in the opposite direction from the arrival path of a rival male in musth. Photo credits O’Connell and Rodwell
Cartilaginous fish such as sharks and rays, as well as a few other fish, have special sensory cells, the ampullae of Lorenzini, capable of detecting electrical and magnetic fields. There is evidence that sharks use this sense to navigate along magnetic fields (Meyer et al. 2005). Another study shows that cattle and deer align along magnetic fields, but there has not been a comprehensive study on large mammals to show the use of magnetic fields in navigation (Begall et al. 2008). Given the elephant’s seismic detection behavior, it is worth posing such a question in future studies.
When a playback experiment is presented both in the air and in the ground, simultaneously, the adjacent positioning of ears to the source would suggest that elephants are using interaural time differences to assess the direction of the signal through the air (Fig. 13.2b). However, when the signal is present in both environments, elephants appear to defer to a seismic assessment first (freezing, shifting weight forward, ears flat to the sides, and trunk on ground) and a preference for bone conduction rather than the somatosensory channel (greater distance between ears as receivers vs. feet) prior to scanning the acoustic environment with ears held out and trunk held up to assess olfactory gradients.
Barring some other explanation, perhaps there is some feature of bone conduction that allows elephants to assess directionality and the concept of localization in bone conduction should be revisited. Due to attenuation of vibrations through the skull at higher frequencies (Stenfelt and Goode 2005), it may be possible to lateralize BC vibrations through the skull due to interaural level differences.
Overall, elephants adopt specific vibration detection postures that are suggestive of either pathway of detection, not just bone conduction. During freezing, sometimes weight is positioned on the toenails, which would facilitate bone conduction, while at the same time, placing a length of the trunk on the ground. It is yet to be determined whether the trunk might play any role in bone conduction, but this behavior would facilitate vibration detection through the somatosensory pathway via the dense distribution of vibration-sensitive Pacinian corpuscles present in the foot (Bouley et al. 2007) and trunk (Rasmussen and Munger 1996).
Behavioral responses to seismically generated playback stimuli indicate that elephants often appear to exhibit behaviors indicative of both modes of detection and only sometimes show a preference toward one pathway or the other. Hence, mechanistically, both somatosensory and bone conducted acoustic pathways appear to provide information to the elephant. It is not known whether either pathway might provide a cleaner channel for signal transmission and detection than the other. While we have examined the somatosensory pathway in depth, elsewhere, here we focus on bone conduction and how vibrational signals might be enhanced via a bone conduction pathway.
2.4 Why Mass Matters
Larger mass is positively correlated with better hearing at low frequencies (Hemila et al. 1995), particularly in relation to bone conduction hearing (Stenfelt et al. 2002). Elephant ossicles, the largest among terrestrial mammals, are at least seven times the mass of human ossicles (Doran 1878; Hemila et al. 1995; Fig. 13.4). High-frequency limits are negatively correlated with ossicular mass (Hemila et al. 1995; Coleman and Colbert 2010), such that the larger the mass, i.e., the larger the inertial limitations on motion, the more limited the high-frequency transmission through the middle ear tends to be (Coleman and Boyer 2012), which may explain why elephants cannot hear sounds above 11 kHz, but humans can (Hemila et al. 1995).

Elephant middle ear ossicles, showing the hypertrophied malleus. CT image courtesy of Darlene Ketten, Mass Eye and Ear Infirmary
We focus our attention on the elephant’s middle ear, specifically, due to the assumption that large ossicles would facilitate bone conduction as has been found in other species. Elephants can hear sounds below 20 Hz but not much above 10 kHz, as compared with human hearing thresholds, which are similar but shifted slightly to the right (Heffner and Heffner 1980), despite such large differences in ossicular shape and size (Nummela 1995). In contrast, these two species differ greatly with the mouse ear, whose frequency thresholds of hearing start and extend much higher [Fig. 13.5 (adapted from Heffner and Heffner 1980, 2007)], making the elephant a more appropriate model for comparison with human hearing, in general.

3 Methods
3.1 Specimen Preparation
Human (N = 1 ear) and African elephant (Loxodonta africana) temporal bones (N = 2 ears) were harvested and prepared. The adult human specimen was obtained from a donor with no history of otologic disease and was visually screened for middle-ear pathologies upon arrival. The elephant specimen was harvested from a 3-month-old zoo mortality, and both were kept refrigerated and wrapped in saline-soaked gauze until the time of use.
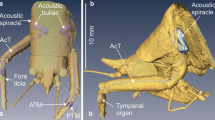
For the human specimen, surrounding soft tissue was removed, and the bony ear canal was shortened to about 1 cm. The facial recess was opened for access to the middle ear. For the elephant specimens, the pinna and soft-tissue section of the ear canal were removed. The facial recess was opened to expose the middle ear cavity. In the elephant’s left ear (ETB1), the large soft structure in the tympanic cavity, which obstructed the malleus and incus heads and the stapes views (except the malleus handle), was removed (Fig. 13.6a).

(a) Image of an elephant temporal bone specimen fully dissected, the middle-ear cavity viewed through a surgical microscope in the orientation used during measurements, where the umbo, malleus head, IMJ (Incus-Malleus joint), incus body and long process, ISJ (Incus-Stapes joint) and stapes are all visible with retroreflective glass beads applied as the laser targets. The locations along the stapes are labeled here. Four different velocity measurements were made on each ossicle. (b) Blow up of same image, showing the laser hitting the glass bead target on SCP4 (anterior crus of the stapes) as seen through the dichroic mirror
In the human ear and the elephant’s left ear, a number of reflective tape targets (0.2 by 0.2 mm2) were spread on the ossicular chain for velocity measurement: four on the stapes, four on the incus, and three on the manubrium of the malleus. Figure 13.6b shows the location of the targets in ETB1. In the elephant’s right ear (ETB2), four targets were placed only on the malleus handle because the soft septum curtaining the rest of the ossicular chain was left intact.
In all the specimens, three targets were placed on the cochlear promontory. The vibration velocity of the cochlear promontory was collected as a measure of input reference for bone-conduction (BC) and for experimental artifact measurements for air-conduction (AC) stimulations.
3.2 Air- and Bone-Conduction Stimulation
To provide AC stimulation, the sound was generated by a loudspeaker (Vifa DPL28, Denmark) coupled to the ear canal via a tube inserted into the ear canal. The gap between the tube and the ear-canal wall was sealed with soft foam. To provide BC stimulation, the specimen was mounted to a mini shaker (B&K 4810) via a 2-cm long brass rod. Vibration of the shaker mimicked inertial BC stimulation. The orientation of the specimen and the shaker was adjusted to allow access by the 3D LDV to all of the points within the same reference frame.
3.3 Measurements of 3D Velocities and Ear Canal Sound Pressure
3D velocities at different locations of the ossicles in response to AC or BC stimulation were measured using a Polytec (Waldbronn, Germany) CLV-3D LDV system, mounted on three motorized and computer-controlled linear translation stages, which allowed the specimen to stay fixed while only the laser was moved to focus on different locations. The motion of these stages, with a resolution of 6.25 μm, was controlled by SyncAV software, which also generated the stimuli and recorded the synchronous responses. The coordinates of each measurement point were obtained and saved by SyncAV. This allowed the 3D LDV to precisely return to any of the previously measured locations.
The three laser beams of the 3D LDV were reflected into both the human and elephant specimens by a dichroic mirror to allow visualization of the experimental field by a Zeiss OPMI-1 operating microscope (Fig. 13.6b). A ThorLabs (Newton, NJ) CMOS USB camera (part no. DCC3240C) connected to the microscope was used to monitor and capture images of the specimens during measurements.
For each measurement location, the velocities in the three orthogonal directions were measured simultaneously. The x-direction approximately aligns with the long process of the incus; y-direction aligns with the piston-motion direction of the stapes; z-direction roughly parallels the anterior-posterior direction.
Ear canal sound pressure near the tympanic membrane during AC or BC stimulation was measured using a Knowles microphone (EK 3103) attached to a probe tube, which was calibrated before measurements. The probe tube was inserted through the sealing foam in the ear canal, and the tip of the probe tube was placed within 2 mm of the tympanic membrane.
Generation of the pure-tone stimulus for the speaker and the shaker and recording of the 3D velocities and ear canal pressures were made using SyncAV (v0.34), a custom LabVIEW (National Instruments, Austin, TX)-based data-acquisition program that performs synchronous averaging between the input channels.
AC or BC drive stimulation consisting of 44 pure tones logarithmically spaced from 3 Hz to 10 kHz were presented using either the speaker or the shaker, while the 3D LDV recorded the vibration velocity at any given location. Meanwhile, the ear canal sound pressure was simultaneously recorded.
Data analysis was performed in MATLAB (Mathworks, Natick, MA). The SyncAV Toolbox, a custom set of scripts designed to interface with SyncAV-generated files, was used to organize the data and for visualization of results, including the three components of the velocity at different locations and the ear canal sound pressure.
4 Results
The ossicular component of BC hearing is thought to be due to the differential motion between the stapes footplate and the bony rim of the oval window. Because the stapes is not always accessible (e.g., in ETB2), a proxy for the stapes motion is the umbo motion. We calculated the differential velocity of the stapes and the umbo with respect to the cochlear promontory near the oval window for each specimen. To compare the results across ears, the differential velocities were normalized by the promontory velocity in z direction, which is the dominant motion direction of the entire specimen in the current configuration. Results are depicted in Fig. 13.7 for the 8 Hz–10 kHz frequency range, where the signal-to-noise ratios of each of the measured velocities were 13 dB, or greater.

Measurement of velocity of the umbo and stapes in x, y, and z directions upon vibration stimulation of both the elephant and human middle ear. (a), (b) and (c) depict x, y, z directions in the umbo. (d), (e) and (f) depict x, y, z directions in the stapes. Motions were normalized against the stationary promontory region of the temporal bone. These data demonstrate the elephant’s ability to detect vibrations via bone conduction in the frequency range of their vocalizations (20 Hz) and that they have much greater sensitivity to bone conduction in the low frequencies (below 200 Hz) relative to humans
4.1 Relative Umbo Velocity in Elephant and Human Ears
Figure 13.7 displays the x (A), y (B), and z (C) components of the magnitude of the relative umbo velocities in elephant and human ears stimulated by BC. The relative umbo velocities, in the left and right elephant ears, across frequencies are similar in all three directions. Despite some local resonances, the relative velocity generally increases with a slope of about +15 dB/decade in the y and z directions and of almost +20 dB/decade in the x direction in the 10–1000 Hz range. Above 1 kHz, the velocities appear to plateau.
In the human ear, the three components of the relative umbo velocities also show some common frequency-dependencies: (1) below 100 Hz the velocity stays low and flat, (2) in the 100–3000 Hz range, the velocities increase rapidly with a slope of as much as 40 dB/decade, and (3) at above about 3000 Hz, the velocities appear to plateau.
Comparison of the relative velocities between the two species for BC stimulation indicates that the umbo of the elephant vibrates with greater amplitude than that of the human from 8 Hz to about 2000 Hz. In the x and y directions, the differences are about 16 dB on average, while for the z direction the differences are about 12 dB on average. Above about 2000 Hz, differences between the elephant and human umbo motions are minor.
4.2 Relative Stapes Velocity in Elephant and Human Ears
Figure 13.7d–f show the relative velocity of the stapes in the 8–10,000 Hz frequency range for the three directions in the elephant and the human ears. Similar to our analysis of the umbo velocity, we calculated the differential velocity of the stapes in each of the three orthogonal directions and normalized them by the promontory velocity in the y-direction.
A striking finding is that at frequencies below 3 kHz, the relative velocity of the stapes in all directions in the elephant is generally greater than that in the human ear. Between 8 Hz and 100 Hz, the difference between the two species is more prominent: the relative velocity of the elephant is greater than that of the human by up to ~40 dB in the x and z directions and by 20 dB on average in the y direction.
The elephant stapes velocity manifests large resonant and anti-resonant peaks in all three components. However, the overall amplitudes across the frequencies are similar among the three components. In each direction, the relative velocity is in general greater at higher frequencies.
In the human ear, the shapes of the three components of the relative stapes velocities across frequency more or less resemble those of the umbo velocity: they are flat at low frequencies, increase with frequency over 100–2000 Hz, and do not change much at higher frequencies. Below about 100 Hz, the velocity in the x direction is about 2–5 times lower than that in the y and z directions.
If we assume that the piston direction of the footplate via the stapes (the y-direction) is representative of the ossicular contribution to BC hearing, the result (Fig. 13.7e) suggests that the sensitivity of the elephant middle ear is superior to that of the human middle ear for the bone conduction pathway below approximately 200 Hz.
5 Discussion
The up to an order of magnitude increase in sensitivity to bone conduction of elephants (relative to humans) below about 200 Hz (Fig. 13.7) was unexpected, but makes sense in light of previous research showing the elephant’s use of vibrations in communication. The difference in sensitivity in two species with similar auditory thresholds highlights why inter-species hearing and vibration sensitivity comparisons are important. Of particular interest are comparisons of species that have similar thresholds but are slightly offset on either end of the frequency spectrum. The fact that elephants have higher sensitivity to bone conduction at the low-frequency threshold relative to humans, and yet a slightly lower frequency limit at the high-frequency threshold of human hearing, could be instructive as a model to understand what factors actually pose limits to human hearing thresholds at both ends of their hearing range.
In future studies, we plan to overlay the x, y, z velocity data from the laser vibrometry onto micro-CT scans of the malleus, incus, and stapes in both elephants and humans to visually compare the relative motion of each ossicle at low and high frequencies under various conditions, including fusing joints. The cone-CT scan of elephant ossicles depicted in Fig. 13.8, shows the shape and relationship between all three middle ear bones in elephants and indicates that the malleus-incus joint may behave differently in elephants than humans, and possibly than previously described, and that the increased mass of elephant ossicles most likely adds to the flexibility of the joints.

Cone beam CT scan of elephant ossicles (0.09–0.4 mm), showing the shape and relationship among all through middle ear bones. Prior to performing a micro-CT image on this specimen for improved resolution, the current image indicates that the malleus-incus joint may behave differently than in humans and that the increased mass of elephant ossicles may dictate flexibility of motion overall
The range of frequency modulation within an elephant acoustic alarm call is approximately 15–19 Hz (O’Connell-Rodwell et al. 2007). The minimum perceptible frequency change (∆f) is related to the critical bandwidth (CBW) in the following way: CBW = ∆f ∗ 20. Therefore, if this equation holds true for elephants, an estimated ∆f of 0.75 to 0.95 Hz would allow them to detect very small changes in frequency modulation across calls transmitted through the ground, which would explain their ability to discriminate differences between two callers emitting calls within the same call type (O’Connell-Rodwell et al. 2007).
6 Conclusions
The generation of seismic signals in elephants may be a byproduct of vocal communication, but in some situations, may have a larger zone of audibility than its acoustic counterpart. Having the potential to detect the same signal by two different modalities would improve its chances of detection.
The simultaneous monitoring of both airborne and seismic vocalizations can provide cues about the distance of the vocalizing animal, because seismic signals most often travel at a different velocity than their airborne counterparts, which produces a time-of-arrival difference cue that increases with distance from the source (O’Connell-Rodwell et al. 2000a, 2001; Arnason et al. 2002). Seismic communication could supplement airborne communication or be especially beneficial when airborne conditions are not ideal for transmission. In addition, since seismically transmitted signals are less susceptible to the environmental influences that limit airborne transmission, and geometric spreading also produces less attenuation for seismic than airborne vocalizations (1/√r for seismic as opposed to 1/r for acoustic), seismically transmitted vocalizations are potentially detectable at greater distances than airborne vocalizations (Arnason et al. 2002), depending on signal strength, soil velocity, and frequency-dependent absorption (O’Connell-Rodwell et al. 2001; Gunther et al. 2004).
The sophistication with which elephants can detect vibrational cues indicates that the ground may be a very important resource for elephants to send and receive signals and assess their environment. With a better understanding of the sender–receiver process, vibrational communication could be viewed as increasing the biological distance to an elephant’s already long-distance acoustic communication ability.
References
Arnason BT, Hart LA, O’Connell-Rodwell CE (2002) The properties of geophysical fields and their effects on elephants and other animals. J Comp Psychol 116(2):123–132
Begall S, Červený J, Neef J, Vojtěch O, Burda H (2008) Magnetic alignment in grazing and resting cattle and deer. Proc Natl Acad Sci USA 105(36):13451–13455
Bouley DM, Alarcón CN, Hildebrandt T, O’Connell-Rodwell CE (2007) The distribution, density and three-dimensional histomorphology of Pacinian corpuscles in the foot of the Asian elephant (Elephas maximus) and their potential role in seismic communication. J Anat 211:428–435
Christensen-Dalsgaard J (2011) Vertebrate pressure-gradient receivers. Hearing Res 273(1):37–45
Coleman MN, Boyer GM (2012) Inner ear evolution in primates through the Cenozoic: implications for the evolution of hearing. Anat Rec 295:625–631
Coleman MN, Colbert MW (2010) Correlations between auditory structures and hearing sensitivity in non-human primates. J Morphol 271:511–532
Doran AHG (1878) Morphology of the mammalian ossicular auditus. Trans Linn Soc Lond Ser: Zool 1(7):371–497
Gregory JE, McIntyre AK, Proske U (1986) Vibration-evoked responses from lamellated corpuscles in the legs of kangaroos. Exp Brain Res 62:648–653
Gunther RH, O’Connell-Rodwell CE, Klemperer SL (2004) Seismic waves from elephant vocalizations: a possible communication mode? Geophys Res Lett 31(L11602):1–4
Heffner RS (2004) Primate hearing from a mammalian perspective. Anat Rec 281A:1111–1122
Heffner RS, Heffner HE (1980) Hearing in the elephant (Elephas maximus). Science 208:518–520
Heffner RS, Heffner HE (1982) Hearing in the elephant (Elephas maximus): absolute sensitivity, frequency discrimination, and sound localization. J Comp Physiol Psychol 96:926–944
Heffner HE, Heffner RS (2007) Hearing ranges of laboratory animals. J Am Assoc Lab Anim Sci 46(1):20–22
Hemila S, Nummela S, Reuter T (1995) What middle ear parameters tell about impedance matching and high frequency hearing. Hearing Res 85(1–2):31–44
Hill PSM (2008) Vibrational communication in animals. Harvard University Press, Cambridge
Mason M (2016) Internally coupled ears in living mammals. Biol Cybern 110:345–358
Mason MJ, Narins PM (2002) Seismic sensitivity in the desert golden mole: a review. J Comp Psychol 116(2):158–163
Meyer CG, Holland KN, Papastamatiou YP (2005) Sharks can detect changes in the geomagnetic field. J R Soc Interface 2(2):129–130
Narins PM, Reichman OJ, Jarvis JUM, Lewis ER (1992) Seismic signal transmission between burrows of the Cape mole-rat, Georychus capensis. J Comp Physiol A 170:13–21
Narins PM, Lewis ER, Jarvis JUM, O’Riain J (1997) The use of seismic signals by fossorial southern African mammals: a neuroethological gold mine. Brain Res Bull 44:641–646
Nevo E, Heth G, Pratt H (1991) Seismic communication in a blind subterranean mammal: a major somatosensory mechanism in adaptive evolution underground. Proc Natl Acad Sci USA 88:1256–1260
Nummela S (1995) Scaling of the mammalian middle ear. Hearing Res 85:18–30
O’Connell C, Hart LA, Arnason BT (1999) Comments on “Elephant hearing” [J. Acoust. Soc. Am. 104, 1122-1123 (1998)]. J Acoust Soc Am 105:2051–2052
O’Connell-Rodwell CE (2007) Keeping an “ear” to the ground: seismic communication in elephants. Physiology 22:287–294
O’Connell-Rodwell CE, Wood JD (2010) Vibration generation, propagation and detection in elephants. In: O’Connell-Rodwell CE (ed) The use of vibrations in communication: properties, mechanisms and function across taxa. Research Signpost. Transworld Research Network, Trivandrum, pp 183–200
O’Connell-Rodwell CE, Arnason BT, Hart LA (2000a) Seismic properties of Asian elephant (Elephas maximus) vocalizations and locomotion. J Acoust Soc Am 108:3066–3072
O’Connell-Rodwell CE, Rodwell T, Rice M, Hart LA (2000b) The modern conservation paradigm: can agricultural communities co-exist with elephants? (Five-year case study in East Caprivi, Namibia). Biol Conserv 93:381–391
O’Connell-Rodwell CE, Hart LA, Arnason BT (2001) Exploring the potential use of seismic waves as a communication channel by elephants and other large mammals. Am Zool 41:1157–1170
O’Connell-Rodwell CE, Wood JD, Rodwell TC, Puria S, Partan SR, Keefe R, Shriver D, Arnason BT, Hart LA (2006) Wild elephant (Loxodonta africana) breeding herds respond to artificially transmitted seismic stimuli. Behav Ecol Sociobiol 59:842–850
O’Connell-Rodwell CE, Wood JD, Kinzley C, Rodwell TC, Poole JH, Puria S (2007) Wild African elephants (Loxodonta africana) discriminate between familiar and unfamiliar conspecific seismic alarm calls. J Acoust Soc Am 122:823–830
O’Connell-Rodwell CE, Wood JD, Wyman M, Redfield S, Puria S, Hart LA (2012) Antiphonal vocal bouts associated with departures in free-ranging African elephant family groups (Loxodonta africana). Bioacoustics 21:215–224
Rado R, Levi N, Hauser H, Witcher J, Alder N, Intrator N, Wollberg Z, Terkel J (1987) Seismic signalling as a means of communication in a subterranean mammal. Anim Behav 35:1249–1251
Rado R, Terkel J, Wollberg Z (1998) Seismic communication signals in the blind mole-rat (Spalax ehrenbergi): electrophysiological and behavioral evidence for their processing by the auditory system. J Comp Physiol A 183:503–511
Randall JA (1989) Individual footdrumming signatures in banner-tailed kangaroo rats Dipodomys spectabilis. Anim Behav 38:620–630
Randall JA (1997) Species-specific footdrumming in kangaroo rats: Dipodomys ingens, D. deserti, D. spectabilis. Anim Behav 54:1167–1175
Randall JA (2001) Evolution and function of drumming as communication in mammals. Am Zool 41:1143–1156
Rasmussen LEL, Munger BL (1996) The sensorineural specializations of the trunk tip (finger) of the Asian elephant, Elephas maximus. Anat Rec 246:127–134
Reuter T, Nummela S, Hemilä S (1998) Elephant hearing. J Acoust Soc Am 104:1122–1123
Shipley C, Stewart BS, Bass J (1992) Seismic communication in northern elephant seals. In: Thomas JA, Kastelein RA, Supin AY (eds) Marine mammal sensory systems. Plenum, New York, pp 553–562
Shoshani J (1996) Skeletal and other basic anatomical features of elephants. In: Shoshani J, Tassy P (eds) The Proboscidea: evolution and palaeoecology of elephants and their relatives. Oxford University Press, Oxford, pp 9–20
Stenfelt S, Goode RL (2005) Bone-conducted sound: physiological and clinical aspects. Ontol Neurotol 26:1245–1261
Stenfelt S, Hato N, Goode RL (2002) Factors contributing to bone conduction: the middle ear. J Acoust Soc Am 111:947–959
Stenfelt S, Wild T, Hato N, Goode RL (2003) Factors contributing to bone conduction: the outer ear. J Acoust Soc Am 113:902–913
van der Merwe NJ, Bezuidenhout AJ, Seegers CD (1995) The skull and mandible of the African elephant Loxodonta africana. Onderstepoort J Vet Res 62:245–260
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
O’Connell-Rodwell, C., Guan, X., Puria, S. (2019). Vibrational Communication in Elephants: A Case for Bone Conduction. In: Hill, P., Lakes-Harlan, R., Mazzoni, V., Narins, P., Virant-Doberlet, M., Wessel, A. (eds) Biotremology: Studying Vibrational Behavior . Animal Signals and Communication, vol 6. Springer, Cham. https://doi.org/10.1007/978-3-030-22293-2_13
Download citation
DOI: https://doi.org/10.1007/978-3-030-22293-2_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-22292-5
Online ISBN: 978-3-030-22293-2
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)