
Abstract
Due to the quantity of information available in the early twenty-first century, big data has become a frequently emphasized factor, and particularly so in the geographical research agenda. However, more data and information do not necessarily result in improved awareness of spatial problems: Communication of geographical knowledge (e.g., on environmental issues) is also complicated by geographical, temporal, and psychological distance between cause and effects, leading users to perceive spatial problems as taking place “later” or “elsewhere”. In this text, we discuss how immersive virtual reality (VR) technologies can help to overcome these different kinds of distances. Two broad topics are addressed: The first, covered in Sect. 4.2, explores the idea of immersion from a technological perspective and also discusses the main differences between immersive and current desktop-based geovisualization VR systems. The second, presented in Sect. 4.3, concerns the potential of immersive VR from the perspective of the user and introduces the concept of spatial presence. Against the theoretical background of Sects. 4.2 and 4.3, a working method defining how geospatial data can be visualized in immersive VR systems under current technological conditions is presented in Sect. 4.4. We argue that current geographic information systems (GIS) are not yet directly compatible with VR output devices, challenging both theoretical and practical models of GIS-based spatial data. The method proposed is set into practice in Sect. 4.5 using the example of a coral reef ecosystem. As is clear from these theoretical and practical considerations, immersive VR technologies can provide powerful tools to facilitate a better understanding of spatial problems in the twenty-first century.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction—Distance in Twenty-First Century Geography
Distance has been always a basic element of academic geography’s self-conception. Traditionally, geographers pay particular attention to spatial distance, as Tobler put it most prominently in his first law of geography (Tobler 1970). However, since the present volume focuses on “Geospatial challenges in the 21st century”, a more general understanding of the meaning of distance is required.
To begin with, the century is a temporal concept and can be described in terms of temporal distance, where the upcoming months and years are closer to us than the end of the centenary. Just as with spatial distance, temporal distance can thus also be subject to cause-and-effect relations: actions in the immediate geographic environment can impact more distant regions, and short-term decisions may likewise have an influence in the long run.
From these action-dependent causalities, another dimension of distance, known as psychological distance, emerged only recently
Psychological distance is a subjective experience that something is close or far away from the self, here, and now. Psychological distance is thus egocentric: Its reference point is the self, here and now, and the different ways in which an object might be removed from that point—in time, space, social distance, and hypotheticality—constitute different distance dimensions. (Trope and Liberman 2010)
The basic assumption of psychological distance is that people do not necessarily define their decisions based on how close in space and time a given problem is, but rather as a function of how close they perceive a problem to be. As cited above, this perceived psychological distance does not simply depend on spatial and temporal factors, but also on the dimensions of social and hypothetical distance. While social distance (e.g. “between self and other, similar and dissimilar others, […]”, Liberman et al. 2007) is usually interlinked with spatial distance, hypothetical distance is associated with distance in time, since it is easier to forecast short-time events than issues in the long run.
Climate change provides a good example to illustrate the different dimensions of psychological distance, together with their practical meaning: At present, climate change is considered to be one of the major global challenges (cf. the Royal Geographical Society’s platform on twenty-first Century ChallengesFootnote 1). However, many people perceive this issue to be one that is psychologically distant, geographically, temporally, socially, and hypothetically removed from everyday experience. Regarding spatial distance, people tend to perceive climate change to present greater risk to spatially distant regions (Spence et al. 2012). With respect to temporal distance, the concrete impacts of climate change (e.g., sea level rise) are considered as future rather than present-day issues (Leiserowitz 2005). In this case, even if one accepts that climate change is already underway and affecting one’s homeland, one still might perceive that change as a phenomenon that is more relevant to less affluent social groups (e.g., developing countries, Roeser 2012). Finally, people perceive climate change as a hazard with undetermined consequences: for instance “40% of the British public supporting the idea that the climate system is too complex and uncertain for scientists to make useful forecasts.” (Spence et al. 2012).
As with the case of climate change, psychological distance has an effect on other twenty-first century geospatial challenges as well, be it in the realm of nature protection, geopolitics or demography and migration. In any case, increased psychological distance is paralleled by a decreasing awareness of the particular problem. Consequently, issues perceived as distant neither increase the disposition to participate in problem-solving strategies that involve a modification of personal behavior, nor claims for solutions at the policy level.
Current geographical research is devoted to the study of problems involving all four of the aforementioned dimensions of psychological distance. Hence, knowledge of how to overcome psychological distance is of central importance to effectively conceptualize and communicate research and its results. In the subsequent sections of this text, we will argue how virtual reality technologies can help to reduce distance among laymen, academia, and the geospatial challenges of the twenty-first century.
2 Immersive Geospatial Technologies
During recent years, virtual reality (VR) has become a frequently emphasized topic on the geovisualization research agenda. However, there is as yet no available universally applicable definition of VR in the realm of geospatial technologies. In order to provide a terminologically solid context for the following arguments, we will briefly discuss three main frameworks that have been built around the idea of VR in geovisualization. As we shall see, in spite of significant conceptual differences, these frameworks can be integrated under the umbrella term of desktop virtual reality.
Against the concept of a desktop VR we will then try to develop a narrower understanding of virtual reality by introducing immersion as a defining criterion, which allows us to avoid terminological ambiguity and facilitates a reconnection with the issue of psychological distance developed in Sect. 4.1.
2.1 Desktop Virtual Reality
2.1.1 Virtual Globes (VG)
The concept of virtual globes (VG) was coined by the publication of Google Earth in 2005 (Dehn et al. 2016). While the term itself is now firmly rooted in current academic and everyday speech, its definition is not without difficulty: On the one hand, VG are not globes in the traditional cartographic sense of terrestrial globes representing global phenomena. Rather, VG can be understood in terms of geobrowsers that allow the user to navigate and explore a variety of (usually) large-scale datasets (Liao et al. 2017). On the other, Google Earth and comparable platforms could just as well be described as digital globes (Riedl 2007), since the label virtual is not yet justified by the virtual reality features of VG. Regardless of the aforementioned points of critique, we can state that current VG is designed for use on flat (mobile and desktop) computer displays.
2.1.2 Virtual Reality Geographic Information Systems (VRGIS)
In order to argue for a direct connection between VR and geographic information systems (GIS), the label VRGIS is increasingly used in scientific literature (Lv and Li 2015; Lv et al. 2016). The connection of ESRI’s City Engine with head-mounted displays (HMD) such as the Oculus Rift is an example that is frequently cited to illustrate the feasibility of VRGIS (Boulos et al. 2017). However, these case studies cannot hide the fact that current GIS software is not yet VR ready. Rather, due to a lack of data compatibility, middleware (e.g., game engines like Unreal Engine or Unity) is required to make GIS data virtually explorable using HMD. Hence, VRGIS applications such as the aforementioned example are in fact prototypes, developed with considerable technical effort for very specific scenarios. These prototypes are still very distant from the usability and graphics quality of commercial computer games, as well as the rich functionalities that standalone GIS offer. In practical terms, GIS—even when labeled as VRGIS or WebVRGIS (Lv et al. 2016)—remain desktop-based applications.
2.1.3 Virtual Geographic Environments (VGE)
Compared with virtual globes and VRGIS, VGE provide a broader conceptual framework, merging “geographic knowledge, computer technology, virtual reality technology, network technology, and geographic information technology” (Lin et al. 2013). Typically, VGE have four components: (a) data, (b) simulation and modeling, (c) interaction, and (d) a collaboration module (Zhang et al. 2016). Well-founded on the theoretical side, VGE suffer from the same practical shortcomings as VRGIS: Given the limited compatibility between GIS and VR-ready output devices, most VGE are desktop applications; however, virtual reality technology is currently only used for prototyping.
2.2 Immersive Virtual Reality
While we have discussed geovisualization desktop VR in a nutshell, it has become clear that the concept of VR is being interpreted ambiguously: On one hand, virtual globes such as Google Earth do not aspire a visualization on VR displays. On the other, VRGIS and VGE are theoretically built upon VR capabilities, but in practice rather GIS-driven approaches, thus failing in the current VR-disabled GIS. In order to avoid further conceptual blur, and to clearly distinguish between digital and virtual visualization, we will now propose a more specific definition of VR, terminologically identified by the amendment “immersive”.
2.2.1 Immersion
In accordance with recent literature (Skarbez et al. 2017; Slater 2009), we can define immersion as a technological and, hence, objective characteristic of VR applications, describing “the extent to which the computer displays are capable of delivering an inclusive, extensive, surrounding and vivid illusion of reality to the senses of a human participant.” (Slater and Wilbur 1997, p. 3). Inclusive means to fade out the user’s physical environment, e.g., by using a HMD. Extensive means to address different human sensory systems through the VR visualization, e.g., vision, hearing or touch. Surrounding means to provide the user with a panoramic field of view, comparable to human vision in the physical reality. Finally, vivid indicates the level of realism presented by the VR application, and is dictated by image resolution and update rate, for example.
Creating this kind of illusion of reality, the qualities of an immersive VR system depend on several features, which have been recently analyzed by Cummings and Bailenson (2016) within a meta-analysis of more than 80 empirical studies. Accordingly, the following features are decisive:
-
Positional tracking coordinates physical-world with virtual-world movement. If this coordination is perfect, the user is provided with six degrees of freedom (6DoF) allowing movement and rotation along x, y, and z axes.
-
Update rate refers to frequency at which VR scenes are rendered. This frequency should match human vision, since image jitter will disturb the illusion of reality.
-
Stereoscopic displays simulate binocular human vision by providing each eye with an image rendered from a slightly different angle, hence facilitating the perception of depth and three-dimensionality in a VR system.
-
Field of view describes the extent of the virtual world observable at a glance. A field of view comparable to the human visual field, as provided by current HMD such as the Oculus Rift (used for the VR application presented below) or the HTC Vive, benefits the immersive quality.
2.2.2 Technical Components
Considering the aforementioned features, e.g., stereoscopic display and tracking system, it is clear that desktop-based VR systems are non-immersive by definition, and will thus be excluded from further consideration in this chapter. For immersive VR, the main technical components are listed below (Schulze et al. 2011):
-
3D stereo displays provide the users with the illusion of being situated exclusively in a virtual 3D space, while the real world’s physical environment is shut out from visual perception. Since autostereoscopic displays cannot offer such exclusive perception, HMD are a necessary component of current immersive VR.
-
Tracking systems coordinate the user’s motion (e.g., of the head) with the information provided in the virtual environment (e.g., of the visual information rendered on the HMD). Current HMD usually feature 6DoF optical tracking systems, consisting of infrared markers and constellation sensor(s).
-
The graphics rendering unit generates the virtual scene on the fly as a function of the information provided by the tracking system, sending the resulting images to the stereo display. High end, discrete graphic processors are required to perform this task (cf. Goradia et al. 2014).
2.3 Psychological Distance Versus Spatial Presence
From the previous sections, we can derive the assumption that immersive VR systems should facilitate overcoming of the different dimensions of psychological distance discussed at the beginning of this text: Taking the example of a VR representation of a coral reef (as further detailed below), we could reduce the spatial distance to these underwater ecosystems by submerging the user within an immersive VR replica of the reef. Likewise, temporal and hypothetical distance could be diminished through simulations of (probable) past and future scenarios (e.g., coral bleaching). In order to substantiate this assumption, we shall subsequently complement the technological concept of immersion with the cognitive concept of spatial presence on the user side.
2.3.1 Spatial Presence
“Spatial Presence is a binary experience, during which perceived self-location and, in most cases, perceived action possibilities are connected to a mediated spatial environment […]”, (Wirth et al. 2007; cf. Skarbez et al. 2017). With this definition in mind, research on immersive VR is built on two core assumptions
-
Spatial presence facilitates understanding: “An increased sense of presence is often thought to […] increase the effectiveness of mediated environment applications (e.g. the practical use of such environments as tools for entertainment, learning, training, or therapy.” (Cummings and Bailenson 2016)
-
Highly immersive VR technology facilitates the formation of spatial presence, i.e., the user’s perception of being there (e.g., Seibert and Shafer 2018; Ahn et al. 2016; Bailey et al. 2016).
While promising for the communication of twenty-first-century geospatial challenges, spatial presence on the user side is by no means the necessary outcome of every immersive VR application. On the one hand, different components of a VR system impact differently upon the perception of spatial presence, with tracking level, interactivity and stereoscopy the main enabling technological factors (Cummings and Bailenson 2016). On the other hand, spatial presence is not an exclusive product of highly immersive VR, but can also emerge from other media products (e.g., novels; Schubert and Crusius 2002). Hence, in order to provide a better understanding of the formation of spatial presence, the following two-step model proves useful.
2.3.2 Formation of Spatial Presence
To formalize the formation of spatial presence, a two-level model has been presented by Wirth et al. (2007), where the user first “must draw upon spatial cues to perceive the mediated environment as a plausible space. Second, the user must also then experience his or herself as being located within that perceived space.” (Cummings and Bailenson 2016).
In accordance with this model, as a first step, VR users construct a mental model of the virtual environment provided. Based on this model, the user answers the question: “is this stimulus a space/room?” (Wirth et al. 2007). Both the VR application (e.g., its attracting features) and the user (e.g., their interest or spatial abilities) will influence the answer to this question. In the affirmative case, a so-called spatial situation model (SSM) will be constructed (ibid.).
In a second step, users are required to prefer virtual to physical reality as their primary frame of spatial reference, thus also answering the question “am I located in this space/room?” (ibid.) in the affirmative. Again, both technological (e.g., update rate) and human (e.g., attention) factors define whether the state of spatial presence is achieved and sustained.
Regarding suitable ways to measure spatial presence, numerous methods have been proposed (Laarni et al. 2015). Subjective approaches, where the user introspectively describes his experience (e.g., using post-test questionnaires; Garau et al. 2008) can be distinguished from objective measures, e.g., of pre-test and post-test performance (IJsselsteijn et al. 2000). With particular focus on the aforementioned process model (Wirth et al. 2007) a spatial presence experience scale (SPES) has been presented by Hartmann et al. (2015).
3 Geovisualization Immersive Virtual Environments (GeoIVE)
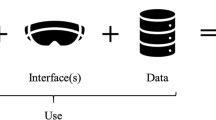
In the previous sections, we have seen that twenty-first-century geography faces different dimensions of distance. Moreover, we provided a definition of immersive VR and argued how VR technology can facilitate overcoming psychological distance through the formation of spatial presence. In this part of the text, we will describe a working method that allows us to visualize geospatial data in immersive VR systems under current technological conditions. For terminological clarity, the concept of Geovisualization Immersive Virtual Environments (GeoIVE) is introduced, defined as a subcategory of immersive VR applications. As such, GeoIVE must provide interactive navigation and stereoscopic view, allowing users the experience of spatial presence. Unlike other types of VR systems, GeoIVE visualize geographic environments in a (prototypically) generalized but realistic manner, at a scale of 1:1. Figure 4.1 summarizes this working method in graphical form, while further details will be specified below.

From GIS data to GeoIVE
3.1 Modeling
In order to build realistic VR representations of real geospace, GIS are the starting point of each geovisualization immersive virtual environment (GeoIVE). Relevant GIS data include both digital terrain models necessary to visualize the relief of the environment tridimensionally and thematic information (e.g., on land cover), which has to be translated into 3D object models (e.g., of particular land cover species). While the export of terrain data into 3D graphics software (at least of small regions) is quite straightforward (e.g., in the form of height maps), realistic 3D models of geospatial features (e.g., species of flora and fauna) cannot as yet be created with GIS. This is due both to missing GIS functions and the lack of data models, which would allow the appropriate description of realistic 3D models at a 1:1 scale.
Hence, 3D modeling of individual features has to be performed in 3D computer graphics software on the basis of reference materials (e.g., photos and videos). While realistic modeling is still a time-consuming procedure, photogrammetric close-range imaging techniques such as structure from motion (SfM) represent a promising approach to the automatic generation of high-quality (both regarding 3D object morphology and texture) models (Schonberger and Frahm 2016). Recently presented mobile devices with (stereo) pairs of cameras could convert SfM-based modeling into a common and ubiquitous form of 3D data acquisition in the near future.
3.2 Composition
Since the current GIS are unsuitable for GeoIVE 3D modeling, GIS data and 3D models generated in graphics software need to be blended at the beginning of the composition pipeline (cf. Fig. 4.1), in order to correctly (in terms of geographic coordinates) position 3D models in VR space. To facilitate the formation of a spatial situational model, a realistic user experience (UX) and ambience setting must be ensured. This implies, in the case of GeoIVE for example, the simulation of atmospheric parameters (e.g., light, wind) and environmental sound. Moreover, the interaction between users and GeoIVE needs to be defined (ideally at a 6DoF level). Since neither the composition of a given geospatial situation (e.g., an ecosystem), nor ambience setting or user interface (UI) can be performed with GIS, game engines—beyond to the current set of common geovisualization tools yet—provide powerful tools with which to close this gap between GIS and immersive VR.
3.3 Publication
Stereo displays are a technical prerequisite for the publication of immersive VR applications. Hence, the GeoIVE resulting from the aforementioned composition phase must be rendered in real time and in the form of a stereo image paired to the HMD used (e.g., Oculus Rift, HTC Vive). While the GeoIVE visualized on a HMD implies high demands on the graphics hardware, the 3D models generated during the modeling and composition process (cf. Fig. 4.1) can also be published through secondary, less- or non-immersive, geovisualization products (e.g., in 3D web libraries such as Sketchfab or as smartphone or desktop applications). Again, it should be noted that middleware (e.g., game engines) is necessary to link GIS input data with HMD output devices in terms of immersive VR systems.
4 Mexico VR—A Case Study of GeoIVE
In the preceding section, we briefly presented the three main stages (e.g., modeling, composition, and publication) each GeoIVE must pass through. In order to depict this working method in further detail, including the intermediate steps shown in Fig. 4.1, the visualization of a coral reef will be discussed below. Coral reefs provide a fine example for the importance of psychological distance, since most people, even those familiar with the sea, have never experienced these underwater ecosystems directly.
The site chosen for this project forms part of the Mesoamerican Reef System, the world’s second largest barrier reef. Within this reef system, an area of 3.5 × 3.5 km (Fig. 4.2), located in the National Marine Park of Puerto Morelos near Cancun (Mexico), was modeled in terms of a GeoIVE.

Mexico VR—a case study of GeoIVE: benthonic habitats and study site in its national and regional context
4.1 Coral Reef Modeling
4.1.1 GIS Data
To represent the reef floor (incl. its major zones of fore reef, reef crest, and back reef) at a level of detail necessary for immersive visualization at a scale of 1:1, bathymetric data was construed from WorldView-2 satellite imagery with a pixel size of 4 m and a vertical resolution of 10 cm between neighboring pixels. For the study area, depths of up to 20.9 m were measured.
Benthic coverage, the most relevant thematic information for this project, was derived both from WorldView-2 data and on-site information (including video and photo material), and aggregated into a seven-part classification of reef communities (Fig. 4.2). It is worth mentioning that the study area includes the “Limones reef”, one of the last spots of the reef system with a high presence of elkhorn corals (Acropora palmata; Rodríguez-Martínez et al. 2014; cf. Fig. 4.4).
4.1.2 3D Modeling
Figure 4.2 represents the study area’s benthic coverage with traditional, two-dimensional cartographic symbols (in this case, through colors). In order to visualize this information in a GeoIVE, classes of benthic coverage first have to be disaggregated into lists of (the most representative) species. In the present project, these listings are derived from the National Biodiversity Information System (SNIB), developed by CONABIO.
Each species is then modeled tridimensionally with 3D computer graphics software (here: Blender). The method used for 3D modeling in this project is based on guide images: These images, taken from the side-, back-/front- and top-/bottom views, are used to fit basic geometry objects (e.g., cuboids) to the identifying features of the species to be represented. Moreover, the same images serve as reference material to define realistic textures of the VR models. Finally, skeletal animations are applied to simulate the active and passive movements typical for each species (Fig. 4.3).

Species modelling and texturing, using the example of the great barracuda (Sphyraena barracuda)
4.2 Coral Reef Composition
To merge both the GIS data and 3D models generated during the aforementioned modeling phase into a format suitable for an immersive visualization on a HMD, game engines (in this case: Unreal Engine (UE)) provide powerful middleware with which to compose a realistic VR application. In accordance with Fig. 4.1, the following intermediate steps can be distinguished:
4.2.1 Ecosystem Composition
Pre-georeferenced GIS data can be directly imported into a game engine software. Digital terrain models are converted into a 3D mesh to provide a geomorphologically correct basis for the GeoIVE. On this basis, thematic layers prepared in a GIS can then be applied to the 3D mesh as 2D textures, conserving spatial relationships between the basemap and ecosystem components. In order to also represent the ecosystem tridimensionally, 3D models are imported and distributed on the 2D texture, according to the real-world distribution area of each species. Figure 4.4 illustrates this procedure using the example of the Acropora palmata’s 3D representations, which are spread on the bathymetry model in accordance with the distribution area documented in the GIS (cf. Fig. 4.2).

GeoIVE before (left) and after (right) ambience setting
4.2.2 Ambience Setting
As shown in Fig. 4.4 (left scene), ecosystem composition in terms of 3D model distribution usually does not produce visualization that is suitable for forming a sensation of spatial presence. Instead, a more realistic ambience setting must also consider the environmental effects (e.g., atmospheric parameters). In this case study, water with characteristics typical of a Caribbean coral reef is simulated in accordance with reference photos and videos through color (by UE’s post-process-volume function) and visibility range (UE’s exponential height fog). An animated material applied to the principal light source simulates caustics, while wave movements are generated by UE’s virtual wind function. To further facilitate the formation of spatial presence, stereo scuba sounds are included to support site-appropriate ambience also through auditory perception. Figure 4.4 illustrates how ambience setting can significantly improve the realism of a GeoIVE.
4.2.3 User Interface
The six degrees of freedom (6DoF) in terms of interaction with and within the VR systems are an important element for achieving immersion and the experience of spatial presence. The techniques of navigation, selection and manipulation and user perspective have to be considered.
Regarding techniques of interaction, the input device chosen is crucial. Since common input tools such as mouse and keyboard are not suitable for 6DoF navigation in a 3D space, an optical tracking system is used in this project. This system tracks the user’s head, translating head movements in congruent views within the GeoIVE, so that users see the sunlight when looking up, or the sea floor when looking down, for example. Handheld motion controllers allow users to explore the virtual ecosystem.
Regarding user perspective, navigation in this project is based on the flying vehicle control model metaphor (cf. Duan et al. 2015). Alternatively, it would be possible to put the user not into the perspective of a neutral observer but rather into the role of a protagonist within the GeoIVE (e.g., as an avatar of a given species or human actor). Recent studies indicate that VR applications produce higher engagement, when people interact from the perspective of an avatar; this so-called embodiment increases users’ involvement with environmental issue, as shown by the example of ocean acidification (Ahn et al. 2016).
4.3 GeoIVE Production
Game engines (here: Unreal Engine) allow packaging of the final VR application for all of the (still few) HMD systems currently available on the market, rendering stereo images of the GeoIVE on the fly (cf. Fig. 4.5). However, in order to provide maximum immersion and spatial presence, both HMD and powerful graphics hardware are required. Since this constellation is not yet accessible for most users, we are also publishing parts of the GeoIVE built in this project as less- or non-immersive applications.

Stereo-scene of the final GeoIVE, rendered for a HMD
A less-immersive but more readily accessible solution is offered by VR-enabled applications, where a head-mounted smartphone provides the display and processor of the VR system (e.g., Google’s Cardboard). In the present project, we took advantage of this alternative in the form of a smartphone app, where the user can experience all modeled reef species tridimensionally with a head mount for a smartphone. It should be noted, that standalone HMD, with no external PC or smartphone attached (e.g., Oculus Go), promise a more widespread coverage of highly immersive VR applications in the near future.
Finally, for those users with no type of HMDs at hand, a non-immersive desktop VR application of the coral reef was built by the game engine in order to provide an even broader public with the information generated. Both the GeoIVE and all secondary VR applications generated during this project are available online.Footnote 2
5 Conclusion
Growing volumes of data, paralleled by increasing computer processing power, allow us to look ever further in time and space. As we have seen at the beginning of this chapter, these different dimensions of distance create psychological distance, complicating the transfer of knowledge that pertains to policy and actions and thus participation in the solving of geospatial problems. Moreover, these data are frequently put into numbers (i.e., quantitative), while user studies indicate that people are rather “numbed by numbers” (Slovic 2007). Immersive VR technologies convert the numbers of big data into qualitative scenarios that one can experience and comprehend, reducing distance through the formation of spatial presence in GeoIVE of present, past, and future geographies.
GeoIVE have not yet been included in the set of core geospatial technologies (GST; Baker et al. 2015). The benefits are obvious though: Developing spatial-thinking abilities via GST is frequently mentioned as a central learning target in geography education (Donert et al. 2016; Otero and y Torres 2017). GeoIVE provide a new technological framework to integrate established GST like GIS and remote sensing into complete learning lines (cf. Donert et al. 2016), not only facilitating geospatial skills like asking geographic questions and acquiring geospatial information (National Research Council 2006) but also to “explore and visualize real-world, critical problems” (Tsou and Yanow 2010) in a virtual environment. For these purposes, GeoIVE are fine instruments: They not just allow to explore and visualize geospatial problems distant in time and/or space, but also produce engagement and involvement with the problems visualized, thus stimulating a quite Socratic concept of thinking, where understanding and taking action are tightly connected. Furthermore, it is worth recalling that we have proposed to use game engine software to connect GIS with immersive VR output devices. Consequently, GeoIVE can also be conceptualized as computer games and hence provide a genuine link between GST and gamification approaches (Boulos et al. 2017; Freina and Canessa 2015).
In this paper, it has been argued that geospatial technologies are not yet VR ready, challenging geographers both in theory and practice. On the theoretical side, the relationship between virtual and physical reality (with the latter the traditional subject of geographic research) has to be questioned: It is often assumed that immersive virtual environments are not real, but rather mere simulations and representation of reality. However, this assumption does not necessarily hold true (cf. Dilworth 2010; Brey 2014) and geographers are required to define, to what extent shall virtual space be a field of research in twenty-first-century geography. Addressing this question is all the more urgent since the aforementioned considerations are not limited to virtual reality in the narrow sense discussed in this paper. Rather, a theoretical framework is required that also includes future options of augmented reality (AR), where physical reality is blended with VR elements.
On the practical-technical side, we have seen that the compatibility of current GIS with immersive output devices such as HMD is limited. This is not only due to missing stereoscopic real-time rendering of GIS content, but also the predominant spatial data models, which are not designed to represent geodata at a 1:1 scale necessary to provide users with spatial presence in an immersive environment. Overcoming both technological and theoretical shortcomings will be a challenge for twenty-first-century geographers that must be overcome in order to effectively link real geographies and virtual realties with immersive geospatial technologies. The main purpose of this text was to indicate how geography could benefit from linking virtual and real.
References
Ahn SJG et al (2016) Experiencing nature: embodying animals in immersive virtual environments increases inclusion of nature in self and involvement with nature. J Comput-Mediated Commun 21(6):399–419
Bailey JO, Bailenson JN, Casasanto D (2016) When does virtual embodiment change our minds? Presence: Teleoperators Virtual Environ 25(3):222–233
Baker TR et al (2015) A research agenda for geospatial technologies and learning. J Geogr 114(3):118–130
Boulos M, Lu Z, Guerrero P, Jennett C, Steed A (2017) From urban planning and emergency training to Pokémon Go: applications of virtual reality GIS (VRGIS) and augmented reality GIS (ARGIS) in personal, public and environmental health. Int J Health Geographics 16(1):7
Brey P (2014) The physical and social reality of virtual worlds. Oxford University Press, New York, pp 42–54
Cummings JJ, Bailenson JN (2016) How immersive is enough? A meta-analysis of the effect of immersive technology on user presence. Media Psychol 19(2):272–309
Dehn J, Webley PW, Worden AK (2016) Virtual Globes, where we were, are and will be. In: AGU fall meeting abstracts
Dilworth J (2010) Realistic virtual reality and perception. Philos Psychol 23(1):23–42
Donert K et al (2016) The GI-learner approach: learning lines for geospatial thinking in secondary schools. GI Forum_2016. J Geogr Inf Sci 2:134–146
Duan Q, Gong J, Li W, Shen S, Li R (2015) Improved Cubemap model for 3D navigation in geo-virtual reality. Int J Digit Earth 8(11):877–900
Freina L, Canessa A (2015) Immersive vs desktop virtual reality in game based learning. In: European conference on games based learning, Academic Conferences International Limited
Garau M et al (2008) Temporal and spatial variations in presence: qualitative analysis of interviews from an experiment on breaks in presence. Presence: Teleoperators Virtual Environ 17(3):293–309
Goradia I, Doshi J, Kurup L (2014) A review paper on oculus rift & project morpheus. Int J Curr Eng Technol 4(5):3196–3200
Hartmann T et al (2015) The spatial presence experience scale (SPES). J Media Psychol
IJsselsteijn WA, de Ridder H, Freeman J, Avons SE (2000) Presence: concept, determinants, and measurement. In: Human vision and electronic imaging V. International Society for Optics and Photonics
Laarni J, Ravaja N, Saari T, Böcking S, Hartmann T, Schramm H (2015) Ways to measure spatial presence: review and future directions. In: Lombard M et al (eds) Immersed in media. Springer, Cham
Leiserowitz AA (2005) American risk perceptions: is climate change dangerous? Risk Anal 25(6):1433–1442
Liao H, Dong W, Peng C, Liu H (2017) Exploring differences of visual attention in pedestrian navigation when using 2D maps and 3D geo-browsers. Cartography Geogr Inf Sci 44(6):474–490
Liberman N, Trope Y, Stephan E (2007) Psychological distance. In: Kruglanski AW, Higgins ET (eds) Social psychology: handbook of basic principles, 2nd edn. Guilford Press, New York
Lin H et al (2013) Virtual geographic environments (VGEs): a new generation of geographic analysis tool. Earth Sci Rev 126:74–84
Lv Z, Li X (2015) Virtual reality assistant technology for learning primary geography. In: Gong Z, Chiu D, Zou D (eds) Current developments in web based learning. Springer, Cham
Lv Z et al (2016) Managing big city information based on WebVRGIS. IEEE Access 4:407–415
National Research Council (2006) Learning to think spatially: GIS as a support system in K-12 education. National Academies Press, Washington, D.C.
Otero JÁ, y Torres MLDL (2017) Spatial data infrastructures and geography learning. Eur J Geogr 8(3):19–29
Riedl A (2007) Digital globes. In: Cartwright W, Peterson MP, Gartner G (eds) Multimedia cartography. Springer, Berlin, Heidelberg
Rodríguez-Martínez RE et al (2014) Assessment of Acropora palmata in the Mesoamerican reef system. PLoS ONE 9(4):e96140
Roeser S (2012) Risk communication, public engagement, and climate change: a role for emotions. Risk Anal 32(6):1033–1040
Schonberger JL, Frahm JM (2016) Structure-from-motion revisited. In: IEEE Computer Society (eds) Proceedings of the IEEE conference on computer vision and pattern recognition, IEEE, Piscataway, pp 4104–4113
Schubert T, Crusius J (2002) Five theses on the book problem: presence in books, film and VR. In: PRESENCE 2002-proceedings of the fifth international workshop on presence. Universidad Fernando Pessoa, Porto
Schulze JP et al (2011) Advanced applications of virtual reality. Adv Comput 82:217–260
Seibert J, Shafer DM (2018) Control mapping in virtual reality: effects on spatial presence and controller naturalness. Virtual Reality 22(1):79–88
Skarbez R, Brooks FP Jr, Whitton MC (2017) A survey of presence and related concepts. ACM Comput Surv (CSUR) 50(6), 96:1-96:39
Slater M (2009) Place illusion and plausibility can lead to realistic behaviour in immersive virtual environments. Philos Trans R Soc B: Biol Sci 364(1535):3549–3557
Slater M, Wilbur S (1997) A framework for immersive virtual environments (FIVE): speculations on the role of presence in virtual environments. Presence: Teleoperators Virtual Environ 6(6):603–616
Slovic P (2007) Numbed by numbers. Foreign Policy. In Digital form: http://foreignpolicy.com/2007/03/13/numbed-by-numbers/
Spence A, Poortinga W, Pidgeon N (2012) The psychological distance of climate change. Risk Anal 32(6):957–972
Tobler WR (1970) A computer movie simulating urban growth in the Detroit region. Econ Geogr 46(sup1):234–240
Trope Y, Liberman N (2010) Construal-level theory of psychological distance. Psychol Rev 117(2):440–463
Tsou MH, Yanow K (2010) Enhancing general education with geographic information science and spatial literacy. J Urban Reg Inf Syst Assoc 22(2):45–54
Wirth W, Hartmann T, Böcking S, Vorderer P, Klimmt C, Schramm H, Saari T, Laarni J, Ravaja N, Gouveia FR, Biocca F (2007) A process model of the formation of spatial presence experiences. Media psychol 9(3):493–525, May 15
Zhang C et al (2016) What’s going on about geo-process modeling in virtual geographic environments (VGEs). Ecol Model 319:147–154
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Hruby, F., Ressl, R., de la Borbolla del Valle, G. (2019). Linking Real Geographies and Virtual Realties with Immersive Geospatial Technologies. In: Koutsopoulos, K., de Miguel González, R., Donert, K. (eds) Geospatial Challenges in the 21st Century. Key Challenges in Geography. Springer, Cham. https://doi.org/10.1007/978-3-030-04750-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-04750-4_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-04749-8
Online ISBN: 978-3-030-04750-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)