
Abstract
Among the spectrum of logistics – based measures for sustainable shipping – this chapter focuses on speed optimization. This involves the selection of an appropriate speed by the vessel, so as to optimize a certain objective. As ship speed is not fixed, depressed shipping markets and/or high fuel prices induce slow steaming which is being practiced in many sectors of the shipping industry. In recent years the environmental dimension of slow steaming has also become important, as ship emissions are directly proportional to fuel burned. Win-win solutions are sought, but they will not necessarily be possible. The chapter presents some basics, discusses the main trade-offs and also examines combined speed and route optimization problems. Some examples are presented so as to highlight the main issues that are at play, and the regulatory dimension of speed reduction via speed limits is also discussed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


1 Introduction
The spectrum of logistics-based problems in maritime transportation is broad. Already Chaps. 8 and 9 of this book gave a flavor of such problems, by exploring green solutions for the tramp and liner shipping markets, respectively. Chapter 7 of the book can also be considered to fall in the same category, by investigating possible modal shifts due to sulfur regulations. Logistics-based problems in shipping can be broken down in the categories broadly shown in Table 10.1 below. Some related references are also shown in the table (neither list is encyclopedic).
With the exception of network design and fleet size and mix problems, which are typically defined at the strategic level (planning horizon of several years), and of weather routing problems, which are typically defined at the operational level (planning horizon of a few hours to a few days), most of logistics-based problems in maritime transportation are defined at the tactical planning level (planning horizon of a few days to a few months).
This chapter will examine ship speed optimization from various angles, including combined speed and routing scenarios. In that context, some basics will be outlined, the main trade-offs will be analyzed, and some decision models will be presented. The examples presented will highlight the main issues that are at play. Material of this chapter is mainly drawn from various papers and other work by the authors and their colleagues. These include, among others, Gkonis and Psaraftis (2012), Kapetanis et al. (2014), Psaraftis and Kontovas (2013, 2014), Wen et al. (2017) and more recently Giovannini and Psaraftis (2018).
It is important to note that, in much of the maritime logistics literature, environmental criteria such as emissions reduction are scarce, traditional economic criteria such as cost reduction being the norm. Sometimes such economic criteria map directly into environmental criteria: if, for instance, fuel cost is the criterion, as it is directly proportional to emissions, if fuel cost is to be minimized as an objective, so will emissions, and the solution is win-win.
However, for other objectives, this direct relationship may cease to exist, and one would need to look at environmental criteria in their own right. Even though such criteria were not very common in the past, the body of knowledge that includes such criteria is growing in recent years. Among the set of maritime logistics problems which are important as regards both economic and environmental criteria, perhaps speed optimization is the most important.
In conceptual terms, if x is a vector of the decision variables of the problem at hand, f(x) is the fuel cost associated with x, c(x) is the cost other than fuel and m(x) are the associated maritime emissions (CO2, SOx or others), then a generic optimization problem is the following:
Minimize α(f(x)+c(x))+βm(x) \( s.t.x\in X \)
where α and β are user-defined weights (both ≥0) representing the relative importance the decision-maker assigns to cost versus emissions and X represents the feasible solution space, usually defined by a set of constraints.
One can safely say and without loss of generality that if d(x) is the amount of fuel consumed, p is the fuel price and e is the emission coefficient (kg of emissions per kg of fuel), then f(x) = pd(x) and m(x)= ed(x). Therefore f(x)= km(x) with k=p/e, as both f(x) and m(x) are proportional to the amount of fuel consumed d(x). The cases that different fuels are used onboard the ship, for instance, in the main engine and the auxiliary engines, or if fuel is switched from high to low sulfur along the ship’s trip, represent straightforward generalizations of the above formulation.
Then the above problem can also be written as
Minimize αc(x)+(αk+β)m(x) \( s.t.x\in X \)
The following special cases of the above problem are important:
-
(i)
The case α = 0, β > 0, in which the problem is to minimize emissions
-
(ii)
The case α > 0, β = 0, in which the problem is to minimize total cost
-
(iii)
The case c(x) = 0, in which fuel cost is the only component of the cost
A solution x* is called win-win if both case i and case ii have x* as an optimal solution. It is important to realize that such a solution may not necessarily exist.
It is also straightforward to see that in case iii, cost and emissions are minimized at the same time and we have a win-win solution. It is clear that c(x)=0 is a sufficient condition for a win-win solution. But this is not a necessary condition, as it is conceivable to have the same solution being the optimal solution under two different objective functions. An interesting question is to what extent policy-makers can introduce either (a) a market-based measure (MBM) and/or (b) a set of constraints that would make win-win solutions possible. MBMs are examined in Chap. 11 of this book.
As alluded to earlier, a significant part of the recent literature on green maritime logistics deals with speed optimization. This is because an appropriate selection of ship speed is an important measure to achieving both fuel cost reduction and emissions reduction, therefore it is potentially a win-win proposition. Already Chaps. 7, 8 and 9 of this book look at variable ship speeds in their formulations from various angles.
Even though ships travel slower than the other transportation modes, a basic premise has always been that there is value in ship speed. As long-distance trips may typically last 1–2 months, the benefits of a higher speed may be significant: they mainly entail the economic added value of faster delivery of goods, lower inventory costs and increased trade throughput per unit time.
The need for higher speeds in shipping was mainly spurred by strong growth in world trade and development and in turn was made possible by significant technological advances in maritime transportation in a broad spectrum of areas, including hull design, hydrodynamic performance of vessels, engine and propulsion efficiency, to name just a few. By extension, developments in cargo handling systems and supply chain management and operation have also contributed significantly to fast door-to-door transportation. However, the above basic premise is being challenged whenever shipping markets are depressed and whenever fuel prices are on the increase. In such situations, ships tend to slow down.
Perhaps the most significant factor that is making a difference in recent years is fact that a ship has to be environmentally friendly as regards air emissions. Because of the nonlinear relationship between speed and fuel consumption, it is obvious that a ship that goes slower will emit much less than the same ship going faster.
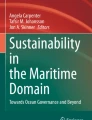
The importance of ship speed on ship emissions can be seen in Fig. 10.1, which breaks down CO2 emissions from the world commercial fleet by ship type-size combination (Psaraftis and Kontovas, 2009a). The data of Fig. 10.1 is from the IHS Fairplay database, and the base year is 2007 (45,620 commercial ships accounted for).

CO2 emissions, world fleet, 2007. (Source: Psaraftis and Kontovas (2009a))
According to this analysis, containerships are the top CO2 emitters in the world fleet. This is perhaps something to be expected, given the relatively high design speeds of these vessels (20–26 knots) as opposed to those carrying bulk cargoes (13–15 knots) and given the nonlinear relationship between speed and fuel consumption and hence emissions.
What is perhaps not so obvious to expect and can be seen in Fig. 10.1 is that just the top-tier category of container vessels (712 vessels of 4400 TEU and above) is seen to produce 110.36 million tonnes of CO2 emissions, which is higher than the 106 million tonnes produced by the entire crude oil tanker fleet (2028 vessels). This means that if ship speed were to be reduced, perhaps uniformly across the board, or even selectively for some categories of vessels, emissions would be reduced too, perhaps drastically. Reducing speed could also have important side benefits: cost reduction is one, and helping a depressed market in which shipping overcapacity is the norm these days is another. In that sense, reducing ship speed may conceivably be a ‘win-win’ proposition.
We note here that since the above analysis refers to the 2007 fleet, today’s picture may be different. However, the 2007 picture is also in line with later results. In the third greenhouse gas (GHG) study of the International Maritime Organization (IMO 2014), which refers to 2012 fleet data, the containership class of vessels was identified as the top CO2 emitter of the world fleet.
If one starts with the simple way to reduce fuel costs (and by extension emissions) by reducing speed, this can be done at two levels. One level is the technological one, that is, build future ships with reduced installed horsepower so that they cannot sail faster than a prescribed speed. The first cellular containerships of the late 1960s and early 1970s that went up to 33 knots in the late 1960s when fuel was cheap are gone forever. Maersk’s flagship ‘Triple-E’ fleet of 18,000 TEU containerships has a design speed of 17.8 knots, down from the 20 to 26 knots range that has been the industry’s norm, and will emit 20% less CO2 per container moved as compared to the Emma Maersk, the Triple-E predecessor as flagship in the Maersk fleet, and 50% less than the industry average on the Asia-Europe trade lane (Maersk 2013). Triple-E stands for economy of scale, energy efficiency and environmentally improved performance.
The other level of speed reduction is the logistics-based (tactical/operational) one. At that level, an existing ship can sail slower than its design speed. In shipping parlance, this is known as ‘slow steaming’ and may involve just slowing down or even ‘derating’ a ship’s engine, that is, reconfiguring the engine so that a lower power output is achieved, so that even slower speeds can be attained. Such a reconfiguration may involve dropping a cylinder from the main engine or other measures. Depending on engine technology, ‘slow steaming kits’ are provided by engine manufacturers so that ships can smoothly reduce speed at any desired level. In case speed is drastically reduced, the practice is known as ‘super slow steaming’.
Slow steaming is not only practiced in the container market, although it may seem to make more sense there due to the higher speeds of containerships. Slow steaming is reported in every market. In December 2010, Maersk Tankers was reported to have their very large crude carriers (VLCCs) sailing at half their speed. The speed of 16 knots (design speed) was reduced to less than 10 knots on almost one third of its ballast legs and between 11 and 13 knots on over one third of its operating days. For example, a typical voyage from the Persian Gulf to Asia normally takes 42 days (at 15 knots laden and 16 knots in ballast). Maersk Tankers decreased speed to 8.5 knots on the ballast leg, thus increasing round trip time to 55 days and saving nearly USD 400,000 off the voyage’s bunker bill (TradeWinds 2010).
The fact that slow steaming is being practiced in periods of depressed market conditions can be confirmed by the fact that whatever fleet overcapacity existed has been virtually absorbed. Since early 2009, the total containership capacity absorbed due to the longer duration of total round trip time for long-haul services has reached 1.27 million TEU in October 2013 (taking early 2009 as a starting point), based on Alphaliner’s estimates (Alphaliner 2013). More recently, UNCTAD (2016) documented a continuing sluggish demand challenged by an accelerated massive global expansion in container supply capacity, estimated at 8% in 2015 – its highest level since 2010. A similar situation pertains in the tanker and dry-bulk markets (Devanney 2011). Even more recently, the two largest container carriers, Maersk and MSC, have agreed to further slow steam to cut costs, with some speeds as low as 13 knots (Lloyds List 2018). Moreover, and according to the third GHG study of the IMO, the reduction of global maritime CO2 emissions from 885 million tonnes in 2007 to 796 million tonnes in 2012 is mainly attributed to slow steaming due to the serious slump in the shipping markets after 2008 (IMO 2014).
At the same time, and even though win-win solutions may look as natural consequences of speed reduction, the practice may have other ramifications which may not be beneficial. For instance, in the long run, more ships will be needed to produce the same transport throughput, and this will entail some costs, some of them financial and some environmental, such as lifecycle emissions due to shipbuilding and recycling (see Chatzinikolaou and Ventikos (2016) for a discussion on the lifecycle approach and Chap. 6 of this book on the issue of ship recycling).
Also, in-transit inventory costs will generally increase, due to the increased transit time of the cargo. These inventory costs are proportional to the value of the cargo, so if a ship hauls high-value goods, sailing at a lower speed may entail significant costs to the shipper (we shall come back to this point later in the chapter).
Yet another side effect of speed reduction is that in the short run, freight rates will go up once the overall transport supply shrinks because of slower speeds. Reducing speed may help a depressed market, but it is the shippers who will suffer and in fact they will do so in two ways: they will pay more and receive their cargo later. For a discussion how tanker spot rates may be impacted as a result of slow steaming see Devanney (2007).
Psaraftis and Kontovas (2009b) investigated, among other things, the option to slow down in Sulfur Emissions Control Areas (SECAs) to reduce the quantity of SOx produced. Realizing that a reduced speed cannot alter the percentage of SOx emissions in a ship’s exhaust, it was shown that if the ship speeds up outside the SECA to make up for lost time within the SECA, more emissions will be produced overall, including SOx. Fagerholt et al. (2015) and Fagerholt and Psaraftis (2015) examined route-speed alternatives for ships operating in and out of emissions control areas (ECAs), and Magirou et al. (2015) developed stochastic optimal control schemes for speed optimization in a dynamic setting.
Another possible side effect concerns effects that speed reduction may have on other modes of transportation, to the extent these are alternatives to sea transportation. This is the situation mostly as regards short sea trades, in Europe but also in North America. If ships are made to go slower, shippers may be induced to prefer land-based transportation alternatives, mostly road, and that may increase overall GHG emissions. Even in long-haul scenarios such as the Far East to Europe trade, some cargoes may be tempted to use the rail alternative (via the Trans-Siberian railway) if the speed of vessels is slow enough (see Psaraftis and Kontovas (2010) for a discussion). Such considerations may also be relevant as regards the recent Belt and Road Initiative (BRI), which aims to promote Chinese trade to Europe via a combination of land-based and maritime corridors.
In short sea shipping, possible modal shifts due to speed reduction and other measures were investigated in Zis and Psaraftis (2017, 2018) in the context of European SECAs and in the Ro/Ro sector. The impact of adjusting ship speed as a mitigation measure was also examined (more on this in Chap. 7 of this book).
Psaraftis and Kontovas (2015), among other things, provided a discussion on the possible impact of slow steaming on port operations. If a port is congested, it would clearly make no sense to sail there at full speed, wasting money on fuel and producing emissions that can be avoided if ship speed were slower. A recent initiative is the so-called virtual arrival, which has been used in order to manage the vessels’ arrival time based on the experience of congestion at some discharging ports. This initiative recognizes known inefficiencies in the supply chain, such as waiting to discharge because of port delays, and reduces fuel consumption and, consequently, emissions by implementing a mutually agreed reduction in a vessel’s speed in order to achieve an agreed arrival time at a port. After the agreement of both parties, the ship slows to the economic speed based on the revised arrival time. Once the voyage is completed, demurrage is calculated based on the original plans, and bunker savings are split between the parties. At the same time, Californian ports have been offering monetary incentives for ocean-going vessels that reduce speed down to 12 knots in the proximity of the port as an emissions reduction measure (vessel speed reduction programme – VSRP) which has seen great participation rates (Zis et al. 2014). In separate but related initiatives, Golias et al. (2010) and Du et al. (2011) developed models that combined optimizing berth allocation with reducing associated vessel emissions.
The rest of this chapter is organized as follows. Section 2 presents some basics of speed optimization. Section 3 discusses factors that may impact fuel consumption and the possible impact of inventory costs. Section 4 deals with combined speed and routing decisions. Section 5 investigates speed optimization in a liner shipping context, and Sect. 6 (together with Appendix A) discusses the speed limit issue. Last but not least, Sect. 7 presents this chapter’s conclusions.
2 Ship Speed Optimization Basics
Before we see how ship speed can be optimized, we present some basics. We do this so as to clear possible misconceptions and highlight some issues which we find important.
The first basic is that ships do not trade at fixed or predetermined speeds.
In the charter (tramp) market, those who pay for the fuel, that is, the ship owner whose ship trades on the spot market, or the charterer if the ship is on time or bareboat charter, will typically choose ship speed as a function of two main input parameters: (a) the fuel price and (b) the market freight rate. In periods of depressed market conditions, as is the typical situation in recent years, ships tend to slow steam. The same is the case if bunker prices are high. Conversely, in boom periods or in case fuel prices are low, ships tend to sail faster.
An exception to the above is in case the ship is on spot charter (rental of the ship for a single voyage) and its speed is prescribed in the charter party contract, either explicitly (speed is, say, 15 knots) or implicitly (cargo pickup and delivery dates are prescribed). In spot charters the fuel is paid for by the ship owner. Agreeing on a prescribed speed in the charter party involves in most cases only the laden part of the trip, with the owner free to choose his speed on the ballast return leg. The speed that is agreed upon for the laden leg may or may not be the speed that the ship owner would have freely chosen if no explicit agreement were in place. If it is higher, the ship owner may ask for a higher rate than the prevailing market spot rate, understanding of course that in this case he may lose the customer to a competitor ship, with whom the charterer can obtain more favorable terms. For a discussion of possible distortions and additional emissions that can be caused by charter party speed agreements, see Devanney (2011a).
A similar situation plays out in the liner market. Container and Ro/Ro operators typically operate a mixed fleet of vessels, some of which are owned vessels and some are chartered from independent owners who are not engaged in liner logistics. In either case, fuel is paid for by the liner operator. The operator receives income from the multitude of shippers whose cargoes are carried on the ship and the rates charged to these shippers can be high or low depending on the state of the market. As in the charter market, high fuel prices and/or depressed market conditions imply lower speeds for the fleet. More on how this can be manifested in the liner sector can be found in Sect. 5 of this chapter.
In spite of the above, many of the models found in the maritime logistics literature assume fixed and known ship speeds. See, for instance, Rana and Vickson (1991), Agarwal and Ergun (2008), Hwang et al. (2008), Grønhaug et al. (2010) and Song and Xu (2012), among others. In these models, ship speed is typically considered not as a decision variable but as a fixed input to the problem. Most of the time, this input is implicit, in the sense that it is used to compute various other explicit inputs that depend on speed, such as sailing times, due dates for cargo pickup and delivery and ship operating costs, of which fuel cost is an important component.
Assuming fixed ship speeds is typically also the case for models that compute shipping emissions worldwide, even though these do not belong to the maritime logistics literature. See, for instance, the second IMO GHG study (IMO 2009) and Psaraftis and Kontovas (2009a), among others. In their calculations, these models typically take as input design speeds extracted from commercially available ship databases, such as those maintained by IHS Fairplay, among others. Such information may be inaccurate and does not necessarily represent actual ship speeds. The third IMO GHG study (IMO 2014) is more advanced in that it uses actual ship speeds in its calculations. Actual ship speeds were taken from the ship’s automatic identification system (AIS) data.
Coming back to maritime logistics models, it is clear that not considering speed as a decision variable may render solutions suboptimal. This is because doing so ignores the economic trade-off between (a) the lower voyage and cargo inventory costs associated with a higher speed and (b) the higher fuel costs associated with such higher speed. Assuming a fixed speed precludes the balancing of such trade-offs.
A speed that is assumed fixed may also in some cases remove flexibility in the overall decision-making process. For problems that include port capacity constraints, berth occupancy constraints, time window constraints or other constraints that preclude the simultaneous service of more than a given number of vessels (see, e.g. Cordeau et al. (2005) and Halvorsen-Weare and Fagerholt (2013), among others), satisfying such constraints would conceivably be easier to meet were it not for the assumed constancy in ship speed. The same is the case for problems that analyze disruptions of service due to weather or other unpredictable events. It is clear that removing the flexibility to adjust ship speed in such scenarios would render any response to the disruption suboptimal.
Still, dealing with speed is not new in the maritime transportation literature, and this body of knowledge is rapidly growing. In Psaraftis and Kontovas (2013), some 42 relevant papers were reviewed, and a taxonomy of these papers according to various criteria was developed. An amended taxonomy, consisting of 51 papers, was presented in Psaraftis and Kontovas (2016); however many additional papers dealing with ship speed appeared after the 2013 paper was published. The 2013 paper’s Google Scholar citations as of October 2018 stood at 207, and even included papers in seemingly unrelated journals such as Meat Science (Mills et al. 2014). The growing number of references indicates a strong interest of researchers in this topic.
Another basic property of optimal speeds is not immediately obvious. It applies mainly to the charter (tramp) market and compares, for a specific ship and a specific route, the speed optimization problem of its ship owner and that of a time charterer who may charter the same ship. The ship owner wants to maximize average profit per day, and the charterer wants to minimize average cost per day. Even though these two optimization problems appear at first glance different, the optimal ship speed for both problems turns out to be the same. For a proof in a rudimentary tramp scenario, see Devanney (2010).
Figure 10.2 is adapted from Gkonis and Psaraftis (2012) and captures the impact of both freight rate and bunker price on optimal speed for a specific very large crude carrier (VLCC) trading from the Persian Gulf to Japan. Optimal here means maximize average per day profit for the ship owner, and speeds are optimized in both laden and ballast conditions. Two market conditions are shown for the spot rate, one at Worldscale (WS) 60 and one at WS120.Footnote 1 Bunker prices (HFO, heavy fuel oil) range from USD 400 to USD 1000 per tonne. It can be observed that the impact of both freight rate and bunker price on optimal speed can be quite dramatic and that the range of optimal speeds can be very broad, depending on the combination of values of these two input parameters. It can be also observed that ballast speeds are typically higher than laden speeds by 1.0 knot in the lower rate scenario and by 1.5 knots in the higher rate scenario.

Optimal VLCC speed as a function of spot rate and bunker price. WS is the Worldscale index. (Adapted from Gkonis and Psaraftis (2012))
Figure 10.3 shows annual CO2 emissions for the same VLCC as a function of bunker price and spot rate. It can be seen that CO2 emissions can be reduced significantly if fuel price goes up. This points out to the possible importance of a bunker levy as a tool to reduce CO2 emissions. The figure also shows that emissions will be reduced (sometimes significantly) whenever fuel prices are up and/or the state of the market is down. Such a reduction is attributed to slow steaming.

Annual CO2 emissions (single VLCC tanker) as a function of fuel price and spot rate. WS is the Worldscale index. (Source: Gkonis and Psaraftis (2012))
A similar situation plays out in the liner market, in spite of obvious differences in the logistical scenario. Liner ships tend to slow down in periods of high fuel prices and/or depressed freight rates and speed up if the opposite is the case. Yet, and even though the impact of a high or a low fuel price is captured by many models in the liner shipping literature, the possible impact of the state of the market on liner ship speed is typically considered as outside the scope of much of that literature. Section 5 of this chapter addresses this issue by presenting a recently developed model that includes the impact of fuel price, state of the market and cargo inventory costs on liner ship speed.
3 Factors That Affect Fuel Consumption and Impact of In-Transit Cargo Inventory Costs
3.1 Fuel Consumption Function
It is known from basic naval architecture that fuel consumption depends nonlinearly on both ship sailing speed and ship payload. Many papers assume that fuel consumption per day is a cubic function of ship speed. The cubic approximation is reasonable for some ship types, such as tankers, bulk carriers or ships of small size, but may not be realistic at slow or near-zero speeds and for some other ship types such as high-speed large container vessels. Even at zero speed the ship consumes some fuel, as its auxiliary engines are typically on to produce electricity. An exception is if electricity is provided to the ship by shore-side supply (also known as ‘cold ironing’), but this is currently an exception rather than the rule. In-port fuel consumption is proportional to overall total port residence time. See Chap. 12 of this book for more on the subject of green ports.
A more serious assumption in many related models is that no dependency between fuel consumption and ship payload is considered. This assumption is reasonable in case ship payload is constant or does not change much. Cruise vessels, passenger vessels, and sometimes Ro/Ro carriers and Ro/Pax vessels belong to this category. However, if this assumption is not valid, it can cause serious under- or overestimation of fuel costs. Ship resistance and hence fuel consumption at a given speed can be drastically different if the ship is full, empty or at an intermediate loading condition.
In tankers and bulk carriers, we have a ‘binary’ situation, as the ship is typically either full or empty, and the difference in fuel consumption between these two extreme conditions can be quite substantial. In container vessels the ship is typically intermediately laden most of the time, but ships in some trunk routes (e.g. Far East to Europe) are mostly full in one direction and mostly empty in the opposite. This can come close to a binary situation, and one would expect non-trivial differences in fuel consumption as a result.
In general, if a ship’s loading condition varies along the legs of a ship’s route (which is typical in pickup and delivery scenarios in which the ship is not fully laden all of the time), it is important that the dependency between ship load and fuel consumption along that route be realistically modeled. In an optimization setting, it would not make sense to claim solutions within, say, 1, 2 or 5% from the optimal solution, or even solutions at the exact optimum, if the fuel consumption function and hence fuel costs are misrepresented by 10, 20 or 30%.
In order to capture this dependency, it is useful to extend the previous formulation of the daily ‘at-sea’ fuel consumption of the ship and assume that it is a known function f(v, w) of both v, the ship’s speed, and w, the ship’s payload, which may actually vary along the ship’s route. Function f(v, w) depends on the ship and essentially on the hull geometry-engine-propeller configuration. It can even be defined for v = 0 (ship in port) and w = 0 (ship going on ballast), and it need not be assumed in closed form but could be given as a point/wise function, as a table or even as the output of a relevant subroutine. Strictly speaking, f must also take into account the reduction of the ship’s total displacement due to fuel being consumed along the ship’s route. However, since displacement would not change much as a result of that consumption, one can practically assume f independent of en-route fuel consumption.
A realistic closed-form approximation of f that takes both v and w into account is f(v, w) = k(p+v q) (w+A)2/3 with k, p and q constants such as k > 0, p ≥ 0 and q ≥ 3. A is the ‘lightship weight’, that is, the weight of the ship if empty including fuel and other consumables (modified admiralty formula). The rationale for such a formulation is that fuel consumption is proportional to the wetted surface of the ship, which is crudely proportional to the displacement of the ship Δ = w + A, raised to the power of 2/3; see also Barrass (2005).
As said earlier, most papers in the literature assume a cubic function, that is, p = 0 and q = 3 and no dependency on payload.
The fuel consumption function also depends on the prevailing weather conditions along the route, which may actually vary in time and space. The way weather conditions are treated in the literature ranges from nontreatment (implying that the average weather conditions the ship expects along its route are implicitly factored into the function f, perhaps by a sea margin coefficient) to more sophisticated approaches in which f depends on the specific weather conditions along the ship’s route, including wave height, wave direction, wind speed, wind direction, sea currents and possibly others. These factors, most of which may be stochastic, can significantly influence both wave and wind resistance and hence fuel consumption and cost. Weather routing models typically take the more sophisticated approach, whereas all other models including ship routing and scheduling, fleet deployment, and other models typically follow the simpler one.
Last but not least, hull condition can also be an important factor that influences the frictional resistance of a ship, and, as a result, its fuel consumption. A foul hull from seaweed and other sea organisms would entail a higher resistance (and hence fuel consumption) than a clean hull, and efforts are being made (via antifouling paints and hull cleaning at regular intervals) to maintain a clean hull. To our knowledge, no maritime logistics model takes into account such factor, all assuming an average hull condition. An interesting problem would be to determine the optimal timing of hull cleaning, assuming an average rate of hull decay and a corresponding increase of fuel consumption through time.
3.2 In-Transit Cargo Inventory Costs
Many of the models that include speed do not include in-transit cargo inventory costs as part of the cost function. These are inventory costs that accrue while the ship is in transit, and they can be a non-trivial component of the cost that the owner of the cargo bears if the ship will sail at a reduced speed. They can be important if timely delivery of the cargo is significant. They can also be important if the voyage time and/or the quantities to be transported are non-trivial. This can be the case in long-haul problems.
It is clear that in-transit inventory costs are important for the charterer, assuming that he is the owner of the cargo. These costs are also important for the ship owner, as a charterer will prefer a ship that delivers his cargo earlier than another ship that sails slower. Thus, if the owner of the slower ship would like to attract that cargo, he may have to rebate to the charterer the loss due to delayed delivery of cargo. In that sense, the in-transit inventory cost is very much relevant in the ship owner’s profit equation, as much as it is relevant in the charterer’s cost equation.
The same is the case if the charterer does not move his own cargo but uses the ship to move somebody else’s cargo. This is a typical situation in liner trades, where a significant part of a liner company’s fleet consists of chartered ships, owned by independent ship owners but operated by the liner company. As the cargo owner will prefer a ship that moves his cargo faster, his in-transit inventory costs are again very much part of the chartered ship’s cost equation.
If we call γ the per day and per tonne in-transit inventory cost of the cargo, it is straightforward to see that γ = PR/365, where P is the CIF value of the cargo (value of cargo at destination) and R the cargo owner’s cost of capital. This represents the revenue that is lost due to a delayed delivery of 1 tonne of the cargo by 1 day. This means (as expected) that expensive cargoes are more costly than cheaper cargoes in terms of inventory cost. This also explains why expensive cargoes tend to get hauled by liner ships that go faster, whereas cheaper (bulk) cargoes go by tramp ships that go slower. Conversely, it also means that in periods of low interest rates this cost component is less important.
Cargo inventory costs can be important in the liner business which involves trades of higher valued goods than those in bulk trades. The unit value of the top 20 containerized imports at the Los Angeles and Long Beach ports in 2004 varied from about USD 14,000/tonne for furniture and bedding to USD 95,000/tonne for optic, photographic and medical instruments (CBO 2006). Delaying 1 tonne of the latter category of cargo by 1 week because of reduced speed would cost some USD91 if the cost of capital is 5%. For a 80,000 tonne payload, this would amount to some USD 7.25 million. This may or may not be greater than the economic benefit of a reduced speed.
We shall come back to the impact of in-transit cargo inventory costs as regards liner shipping in Sect. 5.
4 Combining Speed and Routing Decisions
Speed optimization can be extended into combined ship routing and speed scenarios. We divide the discussion into tactical level problems and operational level problems. As will be seen, these two levels are very different, even though many of the examined issues are similar.
4.1 Tactical Level Problems
At the tactical planning level, where the problem at hand is basically a distribution problem, a number of papers in the literature have looked at combined ship routing and speed scenarios. See, for instance, Hvattum et al. (2013) and Fagerholt and Ronen (2013), among others.
Psaraftis and Kontovas (2014) examined combined single-ship scenarios in which the fuel consumption function depended on both ship speed and payload and in which fuel price, charter rate and inventory costs were also taken onboard. By increasing order of complexity, these scenarios included:
-
Fixed-route scenarios: A ship going from port A to port B, or even on a multiple leg route in which the sequence of port visits is already determined at a higher level, but ship payload varies along the route.
-
Feeder scenarios: A feeder ship collecting cargoes from several ports and bringing them into a hub port or vice versa.
-
Combined pickup and delivery scenarios: A ship picking up cargoes from distinct origins and delivering them to distinct destinations. The route and sequence of pickups and deliveries has to be determined, along with the ship speed at each leg of the route.
The latter scenario was actually a generalized version of the feeder scenario and included several sub-scenarios itself, depending on whether each port has one or multiple pickup cargoes, to be delivered to one or several delivery ports.
Several alternative objective functions were examined, including a minimum time objective, a minimum emissions objective and a minimum total cost objective. It was seen that fuel costs, freight rates and cargo inventory costs generally have an impact not only on the speed decision, but also on the choice of the route.
Wen et al. (2017) extended the above work to a multiple ship setting. A branch and price algorithm and a constraint programming model were developed that considered (a) fuel consumption as a function of payload, (b) fuel price as an explicit input, (c) freight rate as an input and (d) in-transit cargo inventory costs. The alternative objective functions that were examined were minimum total trip duration, minimum total cost and minimum emissions.
A result of this work, which is to be expected, is that more expensive cargoes induce higher ship speeds and therefore more CO2. This is due to the impact of in-transit inventory costs. Table 10.2 shows a five-leg (fixed) ship route sailed by a 16,000 DWT ship in which the payload of the ship varies along the route and the value of the cargo varies from 0 to 25,000 USD/tonne.
As much as problem inputs generally influence both speed and route selection, another result of these combined speed/routing scenarios is perhaps counter-intuitive. It was found that sailing the minimum distance route at minimum speed does not necessarily minimize emissions. This may be so whenever the minimum distance route involves a heavier load profile for the ship. A heavier load profile would result in a higher fuel consumption (and emissions) overall, even though the route may be shorter. So in this case what would intuitively seem like an optimal policy is actually suboptimal. For some examples confirming the above, see Psaraftis and Kontovas (2014) and Wen et al. (2017).
4.2 Operational Level Problems
At the operational planning level, a separate but very important class of the combined speed/route class of problems concerns weather routing scenarios. The important difference vis-à-vis the types of problems described in Sect. 4.1 is that weather routing problems are typically path problems defined as trying to optimize a ship’s track from a specified origin to a specified destination, under a prescribed objective and under time varying and maybe also stochastic weather conditions. Decision variables include the selection of the ship’s path and the speeds along the path, and typical objectives include minimum transit time and minimum fuel consumption. Several constraints such as time windows or constraints to accommodate a feasible envelope on ship motions, vertical and transverse accelerations and ship loads such as shear forces, bending moments and torsional moments can be introduced. The influence of currents, tides, winds and waves, which may be varying in both time and space, should be taken into account.
A variety of methods have been developed to solve the weather routing problem. Below is a non-exhaustive exposition (see Psaraftis et al. 2017 for more details).
The so-called isochrone method was originally proposed by James (1957) and was modified by Hagiwara (1989). Calculus of variations was originally proposed by Haltiner et al. (1962). Papadakis and Perakis (1990) developed the method further and could find the routes and the vessel’s power setting. Perakis and Papadakis (1989) also extended the method to be valid in a time-dependent environment.
Bekker and Schmid (2006) investigated the use of Dijkstra’s algorithm and developed a genetic algorithm to achieve practical strategies and a method in which the two optimization techniques interact to provide a safe route considering the risk of both the sea mine and the environment and making it applicable to sea mine avoidance. Padhy et al. (2008) also developed an application of Dijkstra’s algorithm.
Azaron and Kianfar (2003) accommodated environmental variable at each node and arc logistics independent variables to find the shortest path from upstream to downstream by applying stochastic dynamic programming. Bauk and Kovac (2004) proposed a neural networks approach for determining the optimal route.
Elbeltagi et al. (2005) introduced evolutionary algorithms based on the natural biological evolution and the social behavior of species so as to arrive at near optimum solutions in large-scale optimization problems for which traditional techniques may fail; they also compared five recent evolutionary algorithms: the genetic algorithm, the memetic algorithm, particle swarm, ant colony system and frog leaping.
Kumar and Kumar (2010) implemented a genetic algorithm to find the set of optimal routes to send traffic from source to destination; he also discussed about static and dynamic routing.
Tsou and Hsueh (2010) achieved the objectives such as warning and pre-collision preparation by using the concept of e-navigation and path planning for positioning collision avoidance and applied an ant colony algorithm in the field of artificial intelligence for constructing a collision avoidance model that imitates optimization behavior in real-life application.
Ko (2009) focused the international multimodal transport to connect one or more adjoining countries for delivering cargo with assurance of delivery reliability while minimizing transit time and costs and also considered the economic standard that varies from country to country, which can affect the routes’ performance, due to lack of interconnections, interchangeability and legal framework while delivering cargo.
Last but not the least, in Psaraftis et al. (2017), a proof-of-concept analysis was performed for a ship weather routing system using satellite altimetry to provide data on ocean currents, including an assessment of the potential benefits of such a system under several alternative scenarios. This was in the context of the BlueSIROS project funded by the European Space Agency (ESA).Footnote 2
5 Impact of Freight Rates, Bunker Prices and Inventory Costs on Liner Ship Speeds and Frequencies
In Giovannini and Psaraftis (2018), a simple model was developed for a fixed route liner shipping scenario which, among other things, incorporates the influence of freight rates, along with that of fuel prices and cargo inventory costs into the overall speed optimization process. The objective to be maximized is the line’s average daily profit. Departing from convention, the model was also able to consider flexible service frequencies, to be selected among a broader set than the standard assumption of one call per week. It was shown that this may lead to better solutions and that the cost of forcing a fixed frequency can be significant. Such cost is attributed either to additional fuel cost if the fleet is forced to sail faster to accommodate a frequency that is higher than the optimal one, or to lost income if the opposite is the case. The impact of the line’s decisions on CO2 emissions was also examined.
The model assumes without loss of generality a fleet of N identical containerships deployed on a given fixed route. Inputs to the problem include:
-
The route geometry, represented by a set of ports J and a set of legs I representing the route
-
The length L i of each leg i of the route
-
The freight rate F zx of transporting a TEU from a port z on the route to another port x on the route, for all relevant port pairs (in general F xz ≠ F zx)
-
The demand in TEUs c zx from a port z on the route to another port x on the route, for all relevant port pairs (in general c xz ≠ c zx)
-
The bunker price P
-
The daily operating costs E of each vessel, other than fuel
-
The daily at-sea fuel consumption function f(v) as a function of ship speed v
-
The daily auxiliary engine at port fuel consumption A
-
The average monetary value W i of ship cargo on each leg i of the route
-
The operator’s annual cost of capital, R
-
The time G j spent at each port j
-
The cargo handling cost H per TEU handled
-
The total cargo C i on the ship along leg i of the route
-
The minimum and maximum allowable ship speeds, v min and v max , respectively
The problem’s main decision variables are:
-
The ship speeds v i along each leg i of the route, allowed to be different in each leg
-
The service period t 0, which is the inverse of the service frequency and which is also allowed to vary
-
The number of ships N deployed on the route
If we define \( {\alpha}_i=\frac{R\ {W}_i\ }{365} \) (daily unit cargo inventory costs on leg i of the route), the problem formulation is as follows:
subject to the following constraints:
and
Constraints (10.2) are the upper and lower bounds on ship speed for each leg of the route, constraint (10.3) links the three decision variables of the problem (number of ships, service period and ship speeds) together, and constraint (10.4) is the integrality constraint. Non-negativity constraints could also be added for t 0, but they are redundant because of (10.3).
In (10.1), a difference versus other formulations in which the objective function is defined on a per route basis is that the objective function is defined on a per unit time basis. In that sense, the objective function in (10.1) – to maximize operator’s average daily profit – is the maximization of a ratio, that of total route profit divided by the total duration of the route. Both numerator and denominator of the ratio are nonlinear functions of speed, and of course so is the ratio itself. Constraint (10.3) is also nonlinear. Last but not the least, another difference from other models is that the service period t 0 is not fixed but flexible.
A constrained version of the above problem (and in fact this is a common assumption in most liner shipping formulations) is if one of the three decision variables, the service period t 0, is fixed, that is, it is considered an exogenous input and cannot vary freely. In fact for liner services, it is typically expected that the service period t 0 can take on only prespecified values, the most common of which is 7 days for a weekly service. In theory, other values of t 0 can also be considered (e.g. t 0 = 14 corresponds to a biweekly service, and t 0 = 3.5 is a service twice a week), but this is not very common. Almost unheard of is the case that t 0 may take on other values, such as 6, 8 and 9, or even fractional values. However, as liner services schedules are published in each carrier’s web site and other media well in advance, there is really nothing fundamental that prevents a carrier from setting up a service with t 0 equal to any prescribed value, if these ‘unconventional’ service frequencies happen to achieve better results for the carrier. Whatever it is, it is obvious that the constrained version of the problem (t 0 fixed and equal to 7) will not achieve better results vis-à-vis the case in which t 0 is allowed to vary freely, or is restricted to a wider range or set of values. In that sense, a fixed t 0 will generally come at a price.
The nonlinear optimization problem as formulated above was solved by linearizing the objective function, coding the model in MATLAB and using an Excel spreadsheet solver.
The following three actual liner routes were examined (see also Table 10.3):
-
AE2 – North Europe and Asia: such service links Asia to North Europe and is provided by Maersk. The same service is also provided by MSC under the name SWAN. Indeed, both Maersk’s ships and MSC’s ships are deployed along this route.
-
TP1 – North America (West Coast) and Asia: the route connects Asia to the West Coast of North America. Maersk offers this service; however the same service is also provided by MSC, and it is called EAGLE. As for the AE2 service, along the TP1 route are deployed Maersk’s vessels as well as MSC’s vessels.
-
NEUATL1 – North Europe and North America (East Coast): the NEUATL1 lane links North Europe to the US East Coast. The service is furnished by MSC or similarly by Maersk under the name TA1.
For these routes, three different cases were analyzed:
-
First case: the service frequency is constant, and the number of ships is variable. Therefore the main decision variables in such case are two, the speeds and the number of deployed vessels.
-
Second case: the number of ships is constant, and the frequency is variable, the service period t 0 being allowed to take on the following values: 3.5, 4, 5, 6, 7, 8, 9, 10, and 14 days. Hence the main decision variables are again two, the speeds and the service frequency.
-
Third case: both the frequency and the number of ships are variable, in which case the main decision variables are three. However, in this case the number of ships is bounded from above. This bound is imposed because otherwise the optimal number of ships may reach unrealistic values.
Hereby we show a sample of the results of the above cases. The number of ships concerning the ‘base scenarios’ is the actual number of ships employed on the route involved in the examined routes; these are ten ships for the AE2 route and five ships for each of the TP1 and NEUATL1 routes.
Figure 10.4 depicts a fixed number of ships’ scenarios and shows service frequency’s trend and the average speed’s trend at eight different freight rate values for the route TP1. It can be seen that if the freight rate is low enough, a service period of 8 days is better, whereas for higher rates a service period of 6 days is better.

Fixed number of ships scenario, optimal service period and optimal average speed at different average freight rates (route TP1). (Source: Giovannini and Psaraftis 2018)
The above means that if we force t 0 = 7, the solution will be suboptimal in seven out of the eight instances. We can compute the fleet-level difference Δ in the objective function between the optimal solution and the solution in which t 0 is forced to be equal to 7. This is shown in Table 10.4 above.
At the low end of the freight rate spectrum (instance 1), the model chooses an 8-day service period as optimal and a low corresponding average speed, 15.02 knots. If one forces a higher frequency (and specifically a call every 7 days) and the number of ships is constant, this would only be achievable if the average speed increases to 17.63 knots. The higher frequency would increase the amount of cargo transported and associated revenue, but as the freight rate is low the additional revenue cannot match the increased cost due to the higher speed, hence daily profit for the fleet is lower by 4132 USD/day.
The situation at the high end of the freight rate spectrum (instance 8) is the opposite but its effect the same. At the last instance, the high average rate of 1001 USD/TEU suggests a 6-day service period as optimal and a high corresponding average speed, 21.32 knots. If one forces a lower frequency (a call every 7 days) and the number of ships is constant, this would only be achievable by a lower ship speed, again 17.63 knots. The lower frequency would decrease the cargo transported, but given the freight rate is high, the associated loss of revenue would be greater than the savings in fuel cost due to the lower speed and hence again a lower daily profit (in this instance lower by 131,590 USD/day for the entire fleet). The situation in instances three to seven is similar.
Figure 10.5 is an example of the bounded above number of ships’ scenario and shows the bunker price effect on the average speed and the service period for route AE2. Bunker prices range from 146 to 583 USD/tonne.

Number of ships bounded above scenario, optimal service period and optimal average speed at different bunker prices (route AE2). (Source: Giovannini and Psaraftis 2018)
This example confirms that, under certain circumstances, service periods different from 7 days may achieve better results for the operator and that speed generally is a nondecreasing function of the freight rate. Also, a higher bunker price makes the high service frequency disadvantageous since this would entail deploying more ships and increasing the average speed, hence a higher fuel expenditure (and more emissions).
As one can see in the objective function, expression (1), given a specific service period and a specific number of ships, the optimal sailing speeds along the legs v i depend essentially on two factors, the bunker price and the cargo inventory costs. The influence of these two factors is opposite: the fuel consumption factor leads to a reduction of the speeds v i, so as to respect the service frequency, whereas the inventory cost factor leads to an increase of the speeds along the legs of the route in order to reduce the sailing time on each leg and therefore the in-transit cargo inventory costs. Figure 10.6 shows the effect of inventory costs on ship speeds along the eight legs of the NEUATL1 route. It is seen that whenever inventory costs go up along the route, so does ship speed.

Effect of inventory costs on the speeds along the legs (route NEUATL1). The figure refers to a base scenario in which N = 5 and t 0 = 6. (Source: Giovannini and Psaraftis 2018)
Last but not least, that CO2 emissions can be reduced by a bunker price increase is shown in Fig. 10.7, which also points to the importance of a bunker levy as a potential CO2 emissions reduction measure (more on this in Chap. 11).

Effect of bunker price on daily CO2 emissions (route AE2). (Source: Giovannini and Psaraftis 2018)
More scenarios and results of this analysis can be found in Giovannini and Psaraftis (2018).
6 The Speed Limit Debate
At the latest IMO/MEPC 72 landmark decision to aim for at least 50% GHG reductions by 2050 (IMO 2018), some countries in South America (and most notably Chile and Peru) objected to the use of the term ‘speed reduction’ as a possible emissions reduction measure, on the ground that this may constitute a barrier to their exports to Asia (and particularly to those that involve perishable products such as agricultural products and others). They suggested the use of ‘speed optimization’ instead. In a compromise solution, both wordings were included in the IMO decision text. However, what is meant by ‘speed optimization’ in that text is far from clear and hence is subject to different interpretations.
Irrespective of such legitimate wishes of South American and possibly other countries that have similar concerns, speed directional imbalances have been manifested in several trades worldwide and have been reported in several publications (see, e.g. Cariou (2011), Cheaitou and Cariou (2012) and FMC (2012), among others). Ongoing research by this author and his colleagues in the context of the ShipCLEAN projectFootnote 3 has actually confirmed that liner cargo from South America to Asia moves at a much slower average speed than cargo in the opposite direction and that at current market conditions (spring and summer 2018), slow steaming was being practiced (see also Vilas (2018)). This difference in average speeds is also manifested in the trades between Asia and Europe, with cargoes from Asia to Europe moving faster than cargoes going in the opposite direction. This imbalance is surely due to commercial considerations that take into account, among other things, the difference in the values of the cargo between the two trade directions and the implied difference in in-transit cargo inventory costs. The optimization model presented in Sect. 5 of this chapter is seen to be able to capture such differences, among other things, and reflect them in the speed profile along the route’s legs.
As ship speeds are the decisions of the carriers and not of the shippers, it is not immediately clear what can be done by South American countries who want their cherries and other agricultural or perishable products to China shipped faster. Our understanding is that these countries are mostly concerned by the conceivable imposition of speed limits, which is one of the most controversial (in our opinion) measures that are currently on the table as potential measures to reduce GHG emissions.
In fact, a recurrent measure that has been and is being promoted by various nongovernmental organizations (NGOs) is mandating direct speed limits. Since GHG emissions can be reduced by reducing speed, can someone achieve the same desirable outcome by imposing speed limits? This is an argument that is being heard frequently over the last several years. Among various lobbying groups, the Clean Shipping Coalition (CSC), an NGO, advocated at IMO/MEPC 61 that “speed reduction should be pursued as a regulatory option in its own right and not only as possible consequences of market-based instruments or the EEDI.” However, that proposal was rejected by the IMO at the time. In spite of this decision, lobbying for speed limits has continued by CSC and other groups, and speed limits have been discussed at IMO/MEPC 72 and have succeeded in being included in the roster of potential short term measures toward the 50% GHG emissions reduction target (IMO 2018).
Noting that the speed limit debate is still ongoing, our own position on this issue is that such speed limits are not a good idea. In addition to difficulties in enforcing such a rule, or in deciding what should be the speed limit as a function of ship type and size, it is clear that slow steaming and speed limits are two different things: the first is a voluntary response to market conditions which can dynamically change, and the second is a mandated measure. If the speed limit is above the optimal speed that is voluntarily chosen, then it is superfluous. This may conceivably alleviate the concerns of Chile and Peru, as no reasonable speed limit is likely to be below actual ship speeds to Asia under the current market circumstances. The question is what happens if or when the speed limit is below the optimal ship speed, as is likely to happen in a boom period. If this happens, a speed limit may cause distortions in the market and costs that may exceed the benefits of speed reduction. A likely short-term effect would be an increase in freight rates due to the contraction of the fleet’s annual tonne-km supply curve. This may conceivably render the measure agreeable to some ship owners; however shippers would be hit twice: they would pay more for their cargo and also suffer increased transit times and increased in-transit inventory costs.
We have seen no comprehensive analysis of the possible market distortions of a speed limit. A discussion of some of the issues is in Devanney (2011b). Also we note that Cariou and Cheaitou (2012) investigated policy options contemplated by the European Commission and compared speed limits versus a bunker levy as two measures to abate GHGs, with a scenario from the container trades. They concluded that the former measure is counterproductive because it may ultimately generate more emissions and incur a cost per tonne of CO2 which is more than society is willing to pay and because it is suboptimal as compared to results obtained if an international bunker levy were to be implemented.
A bunker levy belongs to the class of market-based measures (MBMs) for reducing GHG emissions which are examined in Chap. 11 of this book. It is interesting to note that for any given bunker levy that achieves a specific GHG emissions reduction in a given ship route scenario, an equivalent speed limit can be calculated that achieves exactly the same GHG emissions reduction. However, other attributes of the solution are different. A rudimentary scenario that is described in Appendix A of this chapter compares the two options and provides an indication that a bunker levy is preferable to a speed limit.
As this chapter was being finalized, the speed limit option was among the set of short-term options being considered by the IMO/MEPC in the quest to reduce maritime GHG emissions, and the fate of this option remained by and large unknown. It was also being considered by the European Commission, among other possible measures to reduce maritime GHG emissions, and again the fate of this option remained unknown.
7 Conclusions
This chapter has examined speed optimization in maritime transportation from various angles, including its interaction with route optimization. It has confirmed, among other things, that solutions for optimal environmental performance are not necessarily the same as those for optimal economic performance and that a win-win scenario is not necessarily obvious. Also policies that may seem at first glance optimal from an environmental viewpoint may actually be suboptimal. As a private operator would most certainly choose optimal economic performance as a criterion, if policy-makers want to influence the operator in his decision so as to achieve results that are good from a societal point of view, they could either play with parameters that would internalize the external costs of emissions produced and move the solution closer to what is deemed more appropriate for the environment and for the benefit of society or introduce constraints that would aim to achieve a similar outcome.
Notes
- 1.
WS is a nondimensional index measuring the spot rate and is exclusively used in the tanker market. For a specific route, WS is proportional to the spot rate on that route (in USD/tonne) and is normalized by the ‘base rate’ on that route. See Stopford (2007) for a detailed definition.
- 2.
- 3.
- 4.
This is 24 times the speed in knots. The reason we use nm/day instead of knots in the formulas is to avoid having the number 24 in the equations. However, in the tables and results, knots will be used.
- 5.
Out-of-sector emissions reductions (or offsets) are emissions reductions that can be realized by investing the monies that are collected by a bunker levy into emissions reduction projects outside the maritime sector, for instance, by developing a wind farm in New Zealand or a solar farm in Indonesia. See Chap. 11 for more details.
Abbreviations
- AIS:
-
Automatic identification system
- BRI:
-
Belt and Road Initiative
- CBO:
-
(US) Congressional Budget Office
- CIF:
-
Cost insurance freight
- CO2 :
-
Carbon dioxide
- CSC:
-
Clean Shipping Coalition
- DWT:
-
Deadweight ton
- EEDI:
-
Energy Efficiency Design Index
- ECA:
-
Emissions Control Area
- FMC:
-
(US) Federal Maritime Commission
- GHG:
-
Greenhouse gas
- HFO:
-
Heavy fuel oil
- IMO:
-
International Maritime Organization
- MBM:
-
Market-based measure
- MEPC:
-
Marine Environment Protection Committee
- MSC:
-
Mediterranean Shipping Company
- NGO:
-
Nongovernmental organization
- Ro/Ro:
-
Roll on/Roll off
- Ro/Pax:
-
Ro/Ro passenger
- SECA:
-
Sulfur emissions control area
- SOx :
-
Sulfur oxides
- TEU:
-
Twenty-foot equivalent unit
- USD:
-
United States dollar
- VLCC:
-
Very large crude carrier
- VSRP:
-
Vessel speed reduction programme
- WS:
-
World scale (index)
References
Agarwal, R., & Ergun, Ö. (2008). Ship scheduling and network design for cargo routing in liner shipping. Transportation Science, 42(2), 175–196.
Alphaliner. (2013). Extra and super slow steaming help absorb 7.4% of fleet. Alphaliner Weekly Newsletter, 2013(44), October 2013.
Alvarez, J. F., Tsilingiris, P., Engebrethsen, E. S., & Kakalis, N. M. (2011). Robust fleet sizing and deployment for industrial and independent bulk ocean shipping companies. INFOR: Information Systems and Operational Research, 49(2), 93–107.
Andersson, H., Duesund, J. M., & Fagerholt, K. (2011). Ship routing and scheduling with cargo coupling and synchronization constraints. Computers & Industrial Engineering, 61(4), 1107–1116.
Andersson, H., Fagerholt, K., & Hobbesland, K. (2014). Integrated maritime fleet deployment and speed optimization: Case study from RoRo shipping. Computers & Operations Research 2015, 55, 233–240.
Azaron, A., & Kianfar, F. (2003). Dynamic shortest path in stochastic dynamic networks: Ship routing problem[J]. European Journal of Operational Research, 144(1), 138–156.
Barrass, C. B. (2005). Ship design and performance for masters and mates. UK: Butterworth-Heinemann.
Bauk, S., & Kovac, N. (2004). Modeling ship's route by the adaptation of Hopfield-Tank TSP neural algorithm[J]. Journal of Maritime Research, 1(3), 45–64.
Bekker, J. F., & Schmid, J. P. (2006). Planning the safe transit of a ship through a mapped minefield[J]. ORiON, 22(1), 1–18.
Brouer, B. D., Alvarez, J. F., Plum, C. E., Pisinger, D., & Sigurd, M. M. (2013). A base integer programming model and benchmark suite for liner-shipping network design. Transportation Science, 48(2), 281–312.
Cariou, P. (2011). Is slow steaming a sustainable means of reducing CO2 emissions from container shipping? Transportation Research Part D, 16(3), 260–264.
Cariou, P., & Cheaitou, A. (2012). The effectiveness of a European speed limit versus an international bunker-levy to reduce CO2 emissions from container shipping. Transportation Research Part D, 17, 116–123.
CBO. (2006). The economic costs of disruptions in container shipments. Washington, DC: U.S. Congress, Congressional Budget Office.
Chatzinikolaou, S.D., Ventikos, N. P., (2016), Critical analysis of air emissions from ships: Lifecycle thinking and results, in Psaraftis, H,N. (ed.), Green Transportation Logistics: in Search for Win-Win Solutions, Springer.
Cheaitou, A., & Cariou, P. (2012). Liner shipping service optimisation with reefer containers capacity: An application to northern Europe–South America trade. Maritime Policy & Management, 39(6), 589–602.
Christiansen, M., Fagerholt, K., Nygreen, B., & Ronen, D. (2013). Ship routing and scheduling in the new millennium. European Journal of Operational Research, 228(2013), 467–483.
Cordeau, J.-F., Laporte, G., Legato, P., & Moccia, L. (2005). Models and Tabu search heuristics for the berth-allocation problem. Transportation Science, 39(4), 526–538.
Devanney, J. W. (2007). Solving elastic transportation networks. Center for tankship excellence [online]. Available at: www.c4tx.org.
Devanney, J. W. (2010). The impact of bunker price on VLCC spot rates. Proceedings of the 3rd International Symposium on Ship Operations, Management and Economics. SNAME Greek Section, Athens, October.
Devanney, J. W. (2011a). The impact of charter party speeds on CO2 emissions. Center for tankship excellence [online]. Available at: www.c4tx.org.
Devanney, J. W. (2011b). Speed limits versus slow steaming, center for tankship excellence [online]. Available at: www.c4tx.org.
Du, Y., Chen, Q., Quan, X., Long, L., & Fung, R. Y. K. (2011). Berth allocation considering fuel consumption and vessel emissions. Transportation Research Part E, 47, 1021–1037.
Elbeltagi, E., Hegazy, T., & Grierson, D. (2005). Comparison among five evolutionary-based optimization algorithms[J]. Advanced Engineering Informatics, 19(1), 43–53.
Fagerholt, K., & Psaraftis, H. N. (2015). On two speed optimization problems for ships that sail in and out of emission control areas. Transportation Research Part D, 39, 56–64 2015.
Fagerholt, K., & Ronen, D. (2013). Bulk ship routing and scheduling: Solving practical problems may provide better results. Maritime Policy and Management, 40(1), 48–64.
Fagerholt, K., Laporte, G., & Norstad, I. (2010). Reducing fuel emissions by optimizing speed on shipping routes. Journal of the Operational Research Society, 61, 523–529.
Fagerholt, K., Gausel, N., Rakke, J., & Psaraftis, H. (2015). Maritime routing and speed optimization with emission control areas. Transportation Research Part C, 52, 57–63.
FMC. (2012). Study of the 2008 repeal of the liner conference exemption from European Union Competition Law, Bureau of trade analysis. Washington, DC: Federal Maritime Commission.
Giovannini, M., & Psaraftis, H. N. (2018). The profit maximizing liner shipping problem with flexible frequencies: Logistical and environmental considerations. Flexible Services and Manufacturing Journal. https://doi.org/10.1007/s10696-018-9308-z.
Gkonis, K. G., & Psaraftis, H. N. (2012). “Modelling tankers’ optimal speed and emissions,” Archival Paper, 2012 SNAME Transactions, Vol. 120, 90–115, (Annual Meeting of the Society of Naval Architects and Marine Engineers, Providence, RI, USA, Oct 2012).
Golias, M., Boile, M., Theofanis, S., & Efstathiou, C. (2010). The berth-scheduling problem: Maximizing berth productivity and minimizing fuel consumption and emissions production. Transportation Research Record: Journal of the Transportation Research Board, 2166, 20–27.
Goodchild, A. V., & Daganzo, C. F. (2007). Crane double cycling in container ports: planning methods and evaluation. Transportation Research Part B: Methodological, 41(8), 875–891.
Grønhaug, R., Christiansen, M., Desaulniers, G., & Desrosiers, J. (2010). A branch-and-price method for a liquefied natural gas inventory routing problem. Transportation Science, 44(3), 400–415.
Hagiwara, H. (1989). Weather routing of(sail-assisted) motor vessels[D]. Technische Universiteit Delft.
Haltiner G J, Hamilton H D, ‘Arnason G. Minimal-time ship routing[J]. Journal of Applied Meteorology, 1962, 1(1): 1–7.
Halvorsen-Weare, E. E., & Fagerholt, K. (2011). Robust supply vessel planning. In Network optimization (pp. 559–573). Berlin/Heidelberg: Springer.
Halvorsen-Weare, E. E., & Fagerholt, K. (2013). Routing and scheduling in a liquefied natural gas shipping problem with inventory and berth constraints. Annals of Operations Research, 203(1), 167–186.
Hsu, C. I., & Hsieh, Y. P. (2005). Direct versus terminal routing on a maritime hub-and-spoke container network. Journal of Marine Science and Technology, 13(3), 209–217.
Hvattum, L. M., Norstad, I., Fagerholt, K., & Laporte, G. (2013). Analysis of an exact algorithm for the vessel speed optimization problem. Networks, 62(2), 132–135.
Hwang, H.-S., Visoldilokpun, S., & Rosenberger, J. M. (2008). A branch-and-price-and-cut method for ship scheduling with limited risk. Transportation Science, 42(3), 336–351.
IMO. (2009). Second IMO GHG study. Co authored by Buhaug, Ø., Corbett, J. J., Endresen, Ø., Eyring, V., Faber, J., Hanayama, S., et al. IMO document MEPC59/INF. 10.
IMO. (2014). Third IMO GHG study 2014, Co-authored by Smith, T. W. P., Jalkanen, J. P., Anderson, B. A., Corbett, J. J., Faber, J., Hanayama, S., O'Keeffe, E., Parker, S., Johansson,L., Aldous, L., Raucci, C., Traut, M., Ettinger, S., Nelissen, D., Lee, D. S., Ng, S., Agrawal,A., Winebrake, J., Hoen, M., Chesworth, S., Pandey, A., International Maritime Organization (IMO) London, UK, June.
IMO. (2018). Resolution MEPC.304(72) (adopted on 13 April 2018), Initial IMO strategy on reduction of GHG emissions from ships, IMO doc MEPC 72/17/Add.1, Annex 11.
James, R. W. (1957). Application of wave forecasts to marine navigation. U.S. Washington, DC: Naval Oceanographic Office.
Kapetanis, G. N., Gkonis, K., & Psaraftis, H. N. (2014). Estimating the operational effects of a bunker levy: The case of handymax bulk carriers,” TRA 2014 conference, Paris, France, April 2014.
Ko, H. J. (2009). A DSS approach with Fuzzy AHP to facilitate international multimodal transportation network. KMI International Journal of Maritime Affairs and Fisheries, 1(1), 51–70.
Kumar, R., & Kumar, M. (2010). Exploring genetic algorithm for shortest path optimization in data networks. Global Journal of Computer Science and Technology, 10(11), 8.
Lin, D.-Y., & Liu, H.-Y. (2011). Combined ship allocation, routing and freight assignment in tramp shipping. Transportation Research Part E: Logistics and Transportation Review, 47(4), 414–431.
Lloyds List. (2018). MSC boxships slow down as chief executive Diego Aponte overhauls network, 13 June.
Lo, H. K., & McCord, M. R. (1998). Adaptive ship routing through stochastic ocean currents: General formulations and empirical results. Transportation Research Part A: Policy and Practice, 32(7), 547–561.
Maersk. (2013). Building the world’s Biggest Ship. Available online at: http://www.maersk.com/innovation/leadingthroughinnovation/pages/buildingtheworldsbiggestship.aspx.
Magirou, E. F., Psaraftis, H. N., & Bouritas, T. (2015). The economic speed of an oceangoing vessel in a dynamic setting. Transportation Research Part B, 76, 48–67.
Meng, Q., & Wang, S. (2011). Optimal operating strategy for a long-haul liner service route. European Journal of Operational Research, 215, 105–114.
Mills, J., Donnison, A., & Brightwell, G. (2014). Factors affecting microbial spoilage and shelf-life of chilled vacuum-packed lamb transported to distant markets: A review. Meat Science, 98(1), 71–80.
Moccia, L., Cordeau, J. F., Gaudioso, M., & Laporte, G. (2006). A branch-and-cut algorithm for the quay crane scheduling problem in a container terminal. Naval Research Logistics (NRL), 53(1), 45–59.
Norstad, I., Fagerholt, K., & Laporte, G. (2011). Tramp ship routing and scheduling with speed optimization. Transportation Research Part C, 19, 853–865.
Norlund, E. K., & Gribkovskaia, I. (2013). Reducing emissions through speed optimization in supply vessel operations. Transportation Research Part D, 23, 105–113.
Padhy, C. P., Sen, D., & Bhaskaran, P. K. (2008). Application of wave model for weather routing of ships in the North Indian Ocean[J]. Natural Hazards, 44(3), 373–385.
Panagakos, G., Stamatopoulou, I. V., & Psaraftis, H. P. (2014). The possible designation of the Mediterranean as a SECA: A case study. Transportation Research Part D, 28, 74–90.
Papadakis, N. A., & Perakis, A. N. (1990). Deterministic minimal time vessel routing[J]. Operations Research, 38(3), 426–438.
Psaraftis, H. N., & Kontovas, C. A. (2016). Green maritime transportation: Speed and route optimization. In H. N. Psaraftis (Ed.), Green transportation logistics: In search for win-win solutions. Cham: Springer.
Perakis, A. N. (1985). A second look at fleet deployment. Maritime Policy & Management, 12, 209–214.
Perakis, A. N., & Papadakis, N. A. (1989). Minimal time vessel routing in a time-dependent environment. Transportation Science, 23(4), 266–276.
Powell, B. J., & Perakis, A. N. (1997). Fleet deployment optimization for liner shipping: An integer programming model. Maritime Policy and Management, 24(2), 183–192.
Psaraftis, H. N. (2017). Ship routing and scheduling: the cart before the horse conjecture. Maritime Economics and Logistics, 17(2), 1–14.
Psaraftis, H. N., & Kontovas, C. A. (2009a). CO2 emissions statistics for the world commercial fleet. WMU Journal of Maritime Affairs, 8(1), 1–25.
Psaraftis, H. N., & Kontovas, C. A. (2009b). Ship emissions: Logistics and other tradeoffs. Proceedings of10th International Marine Design Conference. Trondheim, Norway, 26–29 May.
Psaraftis, H. N., & Kontovas, C. A. (2010). Balancing the economic and environmental performance of maritime transportation. Transportation Research Part D, 15(8), 458–462.
Psaraftis, H. N., & Kontovas, C. A. (2013). Speed models for energy-efficient maritime transportation: A taxonomy and survey. Transportation Research Part C: Emerging Technologies, 26, 331–351.
Psaraftis, H. N., & Kontovas, C. A. (2014). Ship speed optimization: Concepts, models and combined speed-routing scenarios. Transportation Research Part C: Emerging Technologies, 44, 52–69.
Psaraftis, H. N., & Kontovas, C. A. (2015). Slow steaming in maritime transportation: Fundamentals, trade-offs, and decision models. In C.-Y. Lee & Q. Meng (Eds.), Handbook of ocean container transportation logistics: Making global supply chains effective. Cham: Springer.
Psaraftis, H. N., Morales Llamas, J., Ding, L., Nehammer, J. (2017). BlueSIROS project WP3, proof of concept. BlueSIROS project technical report, Technical University of Denmark.
Rana, K., & Vickson, R. G. (1991). Routing container ships using lagrangean relaxation and decomposition. Transportation Science, 25(3), 201–214.
Reinhardt, L. B., & Pisinger, D. (2014). A branch and cut algorithm for the container shipping network design problem. Flexible Services and Manufacturing Journal, 24(3), 349–374.
Ronen, D. (1982). The effect of oil price on the optimal speed of ships. Journal of the Operational Research Society, 33, 1035–1040.
Song, D. P., & Xu, J. J. (2012). CO2 emission comparison between direct and feeder liner services: A case study of Asia-Europe services interfacing with the UK. International Journal of Sustainable Transportation, 6(4), 214–237.
Stahlbock, R., & Voss, S. (2008). Operations research at container terminals: A literature update. OR Spectrum, 30(1), 1–52.
TradeWinds. (2010). Slow spur for Maersk VLCCs. TradeWinds magazine, 13 December.
Tsou, M. C., & Hsueh, C. K. (2010). The study of ship collision avoidance route planning by ant colony algorithm[J]. Journal of Marine Science and Technology, 18(5), 746–756.
UNCTAD. (2016). Review of maritime transport 2016, United Nations Conference on Trade and Development, United Nations, New York.
Vilas, R. F (2018). Container shipping performance: A case study on a transpacific service, M.Sc. thesis, Technical University of Denmark, July 2018.
Wang, S., & Meng, Q. (2012). Liner ship route schedule design with sea contingency time and port time uncertainty. Transportation Research Part B, 46(5), 615–633.
Wen, M., Pacino, D., Kontovas, C., & Psaraftis, H. N. (2017). A multiple ship routing and speed optimization problem under time, cost and environmental objectives. Transportation Research Part-D, 52, 303–321.
Zeng, Q., & Yang, Z. (2007). Model integrating fleet design and ship routing problems for coal shipping. In Computational science–ICCS 2007 (pp. 1000–1003). Berlin/Heidelberg: Springer.
Zis, T., & Psaraftis, H. N. (2017). The implications of the new sulphur limits on the European Ro-Ro sector. Transportation Research Part-D, 52, 185–201.
Zis, T., & Psaraftis, H. N. (2018). Operational measures to mitigate and reverse the potential modal shifts due to environmental legislation. Maritime Policy & Management. https://doi.org/10.1080/03088839.2018.1468938.
Zis, T., North, R. J., Angeloudis, P., Ochieng, W. Y., & Bell, M. G. H. (2014). Evaluation of cold ironing and speed reduction policies to reduce ship emissions near and at ports. Maritime Economics & Logistics, 16(4), 371–398.
Zis, T., North, R. J., Angeloudis, P., Ochieng, W. Y., & Bell, M. G. (2015). Environmental balance of shipping emissions reduction strategies. Transportation Research Record: Journal of the Transportation Research Board, 2479, 25–33.
Acknowledgments
Work reported in this chapter was funded in part by various sources. Early work was supported in part by the Lloyd’s Register Foundation (LRF) in the context of the Centre of Excellence in Ship Total Energy-Emissions-Economy at the National Technical University of Athens (NTUA), the author’s former affiliation. Later sources include an internal grant by the President of the Technical University of Denmark (DTU) and an internal grant at the DTU Department of Management Engineering, Management Science Division; the BlueSIROS project at DTU, funded by the European Space Agency (DTU Space leader); and the ShipCLEAN project at DTU, funded by the Swedish Energy Agency (Chalmers University project leader). Three recent DTU MSc theses, by Juan Morales, Massimo Giovannini and Fabio Vilas, have also contributed to the chapter (in Sects. 4.2, 5, and 6, respectively).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix A
Appendix A
1.1 Comparison Between a Bunker Levy and Speed Limits
With all the discussion on speed limits at the IMO, the purpose of this appendix is to investigate the issue of a bunker levy vs speed limits. Both measures would cause speed reduction and hence a reduction in CO2 and other emissions (GHG and non-GHG). A bunker levy would induce speed reduction, and a speed limit would mandate it. Below we attempt to compare the two measures, in terms of emissions reduction and other attributes.
To investigate the issue, we use a rudimentary scenario in the container sector. A generalization to more realistic scenarios or other shipping markets is straightforward. The example is taken from the ‘cart before the horse’ paper (Psaraftis 2017).
A containership of capacity Q (TEU) shuttles between port A and port B, whose interport distance is L (nautical miles, nm). The ship’s speed is v (nm/day) Footnote 4 which is within the bracket v min and v max.
Assume that the ship is semi-full in both directions and that the freight rate received by the ship owner is R (USD/TEU), assumed the same in both directions. The assumed load factor of the ship is u (0 ≤ u ≤1), again assumed the same in both directions. R is assumed to be on a per loaded TEU basis, meaning that if the ship is 75% full (u = 0.75), its per (one way) trip income will be 0.75RQ. Assume that the fuel price is p (USD/tonne) and that the fuel consumption function is FC = kv 3 (tonnes/day) with k being a constant. Assume finally that miscellaneous/other operating expenses are X (USD/day) and that port turnaround times are ignored. Q, L, R, u, p, k, v min, v max and X are assumed known inputs (see Table 10.5 above for an example), and the sole decision variable is the ship’s speed v.
We also note that this analysis assumes that R is an exogenous variable outside the line’s control, and we do not attempt to estimate R as a function of container capacity supply and demand. In that sense, it is expected that slow steaming or speed reduction, if applied for all ships sailing the given route, will generally increase R; however this is not captured in our model.
Finally k is such that FC = 144 tonnes/day when v = 22 knots. The value of k for which this is the case is 9.7827*10−7 (again, v in the formulas is in nm/day).
In this scenario, we can compute various attributes of the round trip, such as:
-
Round trip time T = 2 L/v (days)
-
Round trip TEU throughput H = 2uQ (TEU)
-
Round trip cost C = T(pkv 3+X) = 2(pkLv 2+LX/v) (USD)
-
Round trip income I = 2uRQ (USD)
-
Round trip profit P = I – C = 2(uRQ – pkLv 2 – LX/v) (USD)
-
Average per day profit P ′ = P/T = uRQv/L – pkv 3 – X (USD/day)
-
Average per day TEU throughput H ′ = 2uQ/T = uQv/L (TEU/day)
If the objective of the line is to maximize average per day profit, that is, P′, the optimal speed can be shown to be as follows.
with v 0 = (uRQ/3pkL)1/2
Then CO2 emissions per unit time (tonnes/day) for this ship are equal to
with f being the carbon coefficient (assumed here equal to 3.11).
For an individual ship, Table 10.6 above shows the optimal speed and other solution attributes for the above inputs and for selected values of the freight rate R ranging between 500 USD/TEU to 2000 USD/TEU, with a base case value of 1500 USD/tonne.
One can see in general that a higher state of the market (higher R) induces a higher speed and hence higher CO2 emissions for the ship, and vice versa. It should also be noted that in this particular example and for the two extreme cases R = 500 and 2000 USD/TEU, the optimal speed hits the speed’s lower and upper bounds, respectively.
To lower CO2 emissions, one contemplates either a levy q on fuel or a speed limit equal to V, with q and V being user inputs. Either of those would generally result in a lower speed. The question is: Which of these alternatives achieves lower CO2 emissions? The answer of course depends on the values of q and V. Depending on these values, a levy can achieve lower, the same or higher CO2 emissions reductions vis-à-vis those achieved by a speed limit.
Note also that for this comparison to make sense, constant average per day TEU throughput should be maintained, even though speed is reduced. This would necessitate deploying additional ships.
If the initial speed before the levy or the speed limit is v 1 and the final speed after the levy or the speed limit is v 2 (<v 1), we define as the ‘throughput factor’ the ratio r = v 1/v 2 (>1). A ratio r = 1.20 means that r-1 (in this case 20%) more ships should be deployed on the route so as to maintain the same average per day TEU throughput. These additional ships would generate additional profit and additional CO2, both of which should be taken into account. To do so, the average per day profit and the average per day CO2 emissions should be multiplied by r, vis-à -vis those for an individual ship.
To further investigate the issue, we assume that v min ≤ V ≤ v max because if V is outside that range, then either the speed limit is superfluous (V > v max) or the problem is infeasible (V < v min).
The two cases are compared in Table 10.7 above as follows.
The superfluous speed limit case occurs if V ≥ (uRQ/3pkL)1/2 , which for our case and for the base case for R means V ≥ 23.07 knots. If this is the case, v opt is also 23.07 knots.
The non-superfluous (binding) speed limit case occurs if V < (uRQ/3pkL)1/2 = 23.07 knots.
Table 10.8 shows the results for the base case R and for selected values of the speed limit V ranging from 18 to 22 knots.
The last row in the table shows the reductions of CO2 (in tonnes/day) that can be achieved as a function of the speed limit, vis-à-vis the ‘no speed limit’ case (516.67 tonnes/day). Note that the figures for P′, CO2 and ΔCO2 have factored in the effect of the throughput factor r.
In turn, we can investigate what happens if we impose a levy q on bunker fuel. Table 10.9 shows these results (again base case for R) for selected values of q ranging from 100 to 500 USD/tonne.
Again, the last row in the table shows the reductions of CO2 (tonnes/day) that can be achieved as a function of the levy, vis-à-vis the ‘no levy’ case (516.67 tonnes/day). As before, the figures for P′, CO2 and ΔCO2 have factored in the effect of the throughput factor r.
Tables 10.8 and 10.9 are not directly comparable, in the sense that from these tables no direct conclusions can be drawn as to what is preferrable, a speed limit or a levy. To draw such conclusions, we ask the following question: For a given levy q, what is the value of the speed limit V so that the results are the same in terms of CO2? And once this happens, what are the other differences between the two cases?
It turns out that the speed limit V for which the optimal speed is the same as that with a levy q is as follows.
Then the optimal speed is equal to V in both cases.
In this case, and for an individual ship, daily CO2 is also the same and equal to fkV 3 = 2fk(uRQ/3(p+q)kL)3/2
However, daily profit P′ is different. With a levy q, it is P′ = uRQV/L − (p+q)kV3 – X.
With an equivalent speed limit V, and no levy, it is P ″ = uRQV/L − pkV 3 – X (>P ′).
The difference in daily profit is ΔP ′ = qkV 3.
The above are for an individual ship. To maintain the same TEU throughput, the effect of the throughput factor r has also to be taken into account.
This means that for the ship owner, and if the same speed (and hence the same CO2 emissions) reduction are to be achieved, a speed limit is more profitable than a bunker levy. The ship owner will sail the ship at the same speed as that with a levy, but without paying the levy.
Table 10.10 shows the values of V, CO2 and ΔP’ for values of q between 100 and 500 USD/tonne.
This cuts both ways. The difference in daily profit ΔP′, which is positive for the ship owner and which possibly reflects an external cost of CO2 pollution that is not internalized, is a net cost to society. It is money not collected which could be used to achieve out-of-sector emissions reductionsFootnote 5 or for other noble causes (e.g. financial aid to developing countries, research and development, etc.). In that sense, and from a societal point of view, a levy is better than an equivalent speed limit.
An equally serious problem with a speed limit is that for ships of different size, a common and uniform levy q will result in different optimal speeds. A larger ship would in general imply a higher optimal speed, everything else being equal. Therefore, achieving equivalence such as the above by a common and uniform speed limit V will be impossible. To do so, one would have to set size-specific (or maybe even ship type-specific or route-specific) speed limits, which will make the whole exercise an administrative nightmare.
Conversely, if a common and uniform speed limit V is imposed, the limit may be superfluous for some ship sizes and binding for some others, depending on the state of the market, the price of fuel and a host of other parameters. Having the same speed limit in boom market periods and in depressed market periods could create all sorts of distortions. In depressed market periods, the limit may be superfluous, and in boom market periods, the limit would force some ships (likely at the high end of the scale) to slow down, whereas others do not. A speed limit may also be superfluous in one route direction (e.g. from Europe to the Far East, where ships go slower anyway) and binding in the other direction (ships go faster from the Far East to Europe).
Last but not least, a speed limit would be difficult or impossible to enforce, even if it is the same for all ship sizes or types, and it would hardly serve as an incentive to economize and improve the energy efficiency of ships.
For at least the above reasons, a conjecture that we can safely make is that a bunker levy is a preferable instrument (as compared to a speed limit) if one wants to reduce maritime emissions.
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Psaraftis, H.N. (2019). Speed Optimization for Sustainable Shipping. In: Psaraftis, H. (eds) Sustainable Shipping. Springer, Cham. https://doi.org/10.1007/978-3-030-04330-8_10
Download citation
DOI: https://doi.org/10.1007/978-3-030-04330-8_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-04329-2
Online ISBN: 978-3-030-04330-8
eBook Packages: Business and ManagementBusiness and Management (R0)