
Abstract
The scope of this paper is to advance the investigation into the importance of introducing uncertainty in service network design (SND) formulations by examining the uncertainty of travel times, a phenomenon that has been little studied up to now. The topic of our research thus is the stochastic scheduled service network design problem with service-quality targets and uncertainty on travel times, an important problem raising in the tactical planning process of consolidation-based freight carriers. Quality-service targets relate to the on-time operation of services and delivery of commodity flows to destinations. The problem is formulated as a two-stage mixed-integer linear stochastic model defined over a space-time network, with service targets modelled through penalties. Its aim is to define a cost-efficient transportation plan such that the chosen quality-service targets are respected as much as possible over time. An extensive experimental campaign is proposed using a large set of random generated instances with the scope of enhancing the understanding of the relations between the characteristics of a service network and its robustness, in terms of respect of the service schedule and delivery due dates, given business-as-usual fluctuations of travel times. Several analyses are reported identifying the features that appear in stochastic solutions to hedge against or, at least, reduce the bad effects of travel time uncertainty on the performance of a service network.
Supported by the Ministero dell’Istruzione, dell’Università e della Ricerca (MIUR) of Italy, through its Research Projects of Relevant National Interest (PRIN) program, the Sapienza Università di Roma, Italy, through its Progetto di Ateneo La Sapienza, and the Natural Sciences and Engineering Council of Canada (NSERC), through its Discovery Grant program.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Freight transportation operates in a highly competitive, cost and quality-of-service driven environment. In order to meet market requests and still make a profit, carriers need to minimize the costs of their services establishing sets of operating policies to perform the routing of commodity flows and the management of available resources (both human and material) in the most rational and profitable way. We focus on consolidation-based, long-haul freight transportation carriers, where the loads of different demands are grouped, loaded and moved in the same vehicle or convoy for all or part of their itineraries from origins to destinations. To achieve consolidation and servicing many different customers simultaneously with the same vehicles, carriers need to plan a set of regular transportation services, between terminals in their network, operated according to a particular schedule, which is repeated for a certain period of time, e.g., a weekly schedule repeated for six months of a so-called season. This is a rather complex tactical-planning problem that is traditionally addressed through a scheduled service network design (SSND) methodology.
SSND aims to produce the set of scheduled services, together with planned routes for the demand (services used and terminals passed through), to achieve the economic and quality targets of the carrier. The latter normally concern the reliability of service operations with respect to the published schedule and of freight deliveries with respect to promised due dates. While there is quite a body of literature on SSND models for consolidation-based transportation, few address quality-target issues, and even fewer account for fluctuations in travel times and the resulting delays and reliability breach, with monetary and possible market-loss consequences. According to our best knowledge, [12] were the first to jointly address the design of an efficient service network and the consideration of travel-time uncertainty impacting its reliability. The authors proposed a two-stage mixed-integer linear stochastic model over a space-time network. The first stage addresses the selection of services and the routing of freight flows. Service targets are modelled through penalties and addressed in the second stage, where penalties are assigned to late services and deliveries. The authors also proposed an heuristic method to address large instances.
What is still lacking, however, is a deep study focusing on the relations between the characteristics of a service network and its robustness in terms of observance of service schedules and delivery due dates, given business-as-usual fluctuations of travel times. Our objective is to fill this gap. Main questions we explore in our work: What is gained by integrating information about the stochastic nature of travel times directly into the tactical planning methodology? Are different patterns, either in the service selection or in the freight itineraries, suggested when such information is integrated into the model? Is the resulting transportation plan actually more robust with respect to travel time fluctuations? What characteristics are more important in producing such a robustness?
To perform this study, we considered a basic version of the problem in which periodic schedules are built for a number of vehicles and where only travel times vary stochastically. In order to obtain results with the lowest bias possible, we focused on optimal solutions only, for both the deterministic and the stochastic formulations. For this reason, we chose problem sizes allowing the use of standard mixed-integer software (see [12] for an approach able to address instances that cannot be directly addressed by the solver). An extensive experimental campaign was performed using a large set of random generated instances. The analysis and comparison of the stochastic and deterministic solutions provided the mean to identify characteristics that appear to hedge against or, at least, reduce the bad effects of travel time uncertainty on the performance of a service network.
The plan of the paper is as follows. We state the problem in Sect. 2. We briefly recall the stochastic formulation in Sect. 3. The experimental setting, including instance and scenario generation procedures, are reported in Sect. 4. Computational results are presented in Sect. 5. Conclusions and future research paths are discussed in Sect. 6.
2 Problem Description
We briefly recall the main elements of tactical planning and SND for consolidation-based freight carriers; for more detailed explanations we refer to [1, 4, 6] for rail transportation, [3] for maritime transportation, [7, 8, 10] for land-based long-haul transportation, and [9] for intermodal transportation.
Carriers operate over a physical network of uni or intermodal terminals connected by infrastructure (rail, road) or conceptual (navigation) links. They set up and exploit transportation services, according to a given schedule, to satisfy the regular demand. Each demand, or commodity, requires the transportation of a certain quantity of freight from an origin terminal, available at a certain availability date, to be delivered at a destination terminal by a required due date. Each service is characterized by its origin and destination terminals, its schedule, i.e., the departure time at origin, the departure and arrival times at intermediate stops (if any), and the arrival time at destination, as well as a number of characteristics, e.g., its capacity. To take advantage of economies of scale, the loads of different demands are consolidated, loaded together, into the same vehicles. Freight may thus be moved by a sequence of services between its origin and destination, undergoing consolidation (accompanied possibly by loading/unloading) and service-to-service transfer operations at intermediate terminals.
Tactical planning determines the transportation (or load) plan to be operated for a given medium-term planning horizon (typically six months to a year). The plan specifies the service network with its schedule, the itineraries of each demand within the service network, as well as the operations to be performed at each terminal. Scheduled Service Network Design (SSND) supports this planning phase. SSND model takes the form of a fixed-cost, capacitated, time-dependent network design formulation, whose aim is to select the services, and thus the schedule, to make up a cost-efficient service network satisfying the forecast regular demand. Besides the economic efficiency and profitability of its operations, the carrier is also aiming for service reliability in terms of performing according to the schedule and the due dates established with the customers. Carriers will thus often internally set up certain targets of on-time operations, which generally reflect trade-offs between operating costs and the estimated market impact of service performance. Simultaneously, customer contracts may carry penalties for late deliveries and carriers aim to avoid them. We model two types of quality targets, the service target and the demand target, as the minimum degree of conformity to the schedule and the contracted due dates for demand, respectively.
We are aware of very few contributions in the literature addressing the integration of SSND and quality targets. The vast majority of proposed SSND formulations assume deterministic travel times. Yet, it is well known that time fluctuations and delays occur even in the most tightly operated systems due to congestion conditions, adverse weather, etc. We thus proposed the Stochastic Service Network Design Problem with Service Quality Targets (SSND-QST) integrating travel-time uncertainty and service targets into a SSND model, such that targets and the extra costs of undesired delays are accounted for when selecting the service network and the demand itineraries.
The goal of this paper is to verify the worthiness of such a formulation. [13] were the first to address the problem of critically compare the performances of a deterministic and stochastic - in terms of demand - service network design, highlighting the role of consolidation not only as a powerful mean to lower costs, but also to hedge against demand uncertainty. Following their contribution, our research has the same scope of finding insights and characteristics that may define robustness for a service network. We define a schedule as being increasingly more robust, the more cost effectively it deals with varying travel times, hence the lower expected costs it leads to. Specifically, in the present case this means the ability to set up a transportation plan able to be as much as possible congruent with the quality targets desired and promised by the carrier. We address a basic version of the problem: all services are of the same type in terms of speed, priority, and capacity; service time at terminals is deterministic; services may arrive early at a stop, at no additional cost, but have to wait for service until the scheduled time; services may arrive late, in which case, terminal operations begin immediately and connections are not missed. The problem setting we consider aims to determine the “best” transportation plan given a set of possible services, with their respective normal travel times (that is, smooth operations without undue delays), the carrier may operate, without recourse to spot transportation.
3 Model Formulation
Similar to many SSND problems, we modelled the dynamics of the SSND-QST through a space-time network, discretizing the schedule length into a fixed number of time periods of equal length. Demand is represented by a set of commodities, each requiring the transport of a certain volume from an origin to a destination according to its entry and due dates. A set of potential services that the carrier may use is available. Each service has a capacity, a route in the physical network, specifying the set of consecutive terminals visited between its origin and destination, and timing information indicating the normal (ideal conditions without any delay) departure time at origin, the normal arrival time at destination, as well as the normal arrival/departure times at the other terminals visited. A fixed selection (operation) cost is associated to each potential service and a unit commodity transportation cost is associated to each commodity.
A normal travel time and a travel-time random variable are associated to each service leg (a segment between two consecutive stops) of each service. Actual travel times are observed at each period. This information must then be translated into the actual arrival times at destinations, which means that the delays incurred by services and demand-flow delays are observed only when services complete their movement. The service design and routing decisions cannot be changed at that time, but penalties, if any, have to be paid.
The model then takes the form of a two-stage stochastic optimization formulation with simple recourse. The selection of services and the routing of freight decisions are made in the first-stage. Quality targets are expressed through penalties on lateness and added to the objective function. Second-stage variables define the time instant at which a service ends its movement on a given service leg and the time instant at which a commodity arrives at its destination. Lateness of a service is considered as soon as the observed arrival time at a stop exceeds the usual arrival time for that stop; lateness of a commodity is considered as soon as the observed arrival time at destination exceeds its promised due date. Notice that, the lateness of a service at a particular stop does not necessarily imply the transported demand is also late as, e.g., the demand could have been shipped in advance with respect to its due date. Service and demand quality targets must thus be computed separately. The selection of services and the routing of freight thus aim to minimize the fixed service-selection and variable demand-routing cost, plus the expected penalty costs of the chosen plan given travel-time uncertainty. Uncertainty is approximated through a set of scenarios. The second-stage function depends on both design and routing decisions, as well as on the realizations of the random variables expressed through the scenarios. Traditional constraints are then considered, that is, commodity flow conservation, linking-capacity, non-negativity and binary constraints. The complete description and mathematical formulation of the model is available in [12].
4 Experimental Plan
We performed three sets of experiments, named Evaluation Analysis, Structural Comparison, and Comparative Analysis, focused on highlighting differences in reliability, costs and structural complexity between stochastic and deterministic solutions. Deterministic and stochastic mixed-integer linear programming models were implemented in OPL language. Experiments were conducted on an Intel Xeon X5675 computer with 3.07 GHz and 48 GB of RAM. CPLEX 12.6 (IBM ILOG, 2016) was used to obtain solutions.
4.1 Instances and Scenario Generation
We considered a physical service network inspired by the one in [5], consisting of 5 physical nodes and 10 physical arcs and shown in Fig. 1(a). The service network is defined for a schedule length of 15 periods and displays a cyclic nature [5], as illustrated in Fig. 1(b).

Graph representation
We considered 6 demand classes, defined by number of commodities and the time available to deliver them. Three levels of demand are taken into account. Levels 1 to 3 consider 15, 20, and 25 commodities, respectively. Two values were considered for the delivery-time windows, loose (l), with due dates between 11 and 14 periods after the availability date (given a schedule length of 15 periods), and tight (t) with due dates between 9 and 12 periods after the availability dates. The demand classes are represented by DClass(\({\cdot } {\cdot }\)) with the respective values for these two attributes in the following tables.
The potential service network is the same for all instances, with 150 direct services and 7 one-stop services. We generated services with normal duration of 3, 4, and 5 periods. The fixed cost of a direct service is proportional to its normal duration, while, for a service with intermediary stop, it is \(35\%\) less than the cost of the two direct services one would need for the same path.
We modeled travel-time variations through the Truncated Gamma (TG) class of probability distributions [2], which allowed us to control the main elements defining the travel time: normal value, variability, and range, defined as the difference between the maximum and minimum travel times possible on the arc; the former stands for the worst case outside of highly hazardous major disturbances and catastrophic events, while the latter corresponds to the free running time of a service under perfect conditions. The TG distribution, increasing rapidly to the value of the normal travel time, followed by a gradual decrease to the maximum travel-time value (i.e., tail skewed to the right), also captures the observed phenomena of delays occurring much more frequently than early arrivals, with delay lengths generally “not too far” from the normal travel time.
Scenario generation was performed by sampling random values from a TG distribution with particular values for its mode, variance, and range of travel times. The mode of a service (service leg) is its normal duration. Twelve scenario classes, SClass, were generated by considering four variability levels and three ranges. The former were measured in terms of standard deviation, low for level 1, medium for level 2, and high for level 3. Level 4 considers a mixed case, where the lowest variability level is assigned to a subset of physical arcs and the highest to the remaining ones. We set the same lower bound for all cases, but varied the range by using three different upper bounds. We defined a tight range, t, computed as the mode \(-30\%\) of a time-period duration, medium, m, computed as mode plus one time period, and loose, l, computed as medium plus \(30\%\) of a time period. The looser the range, the wider is the concept of “normal” travel time. Scenario classes, SClass(\({\cdot } {\cdot }\)), are thus identified by the pair level of variability (1, 2, 3 or 4) and range (t, m, or l).
Experiments were performed under three levels of increasing penalty costs for each of the two service targets, on-time arrival and maximum acceptable delay. For services, the first level of on-time-arrival penalty was set to \(175\%\) of the cost of the most expensive service, while the first level of the maximum-delay penalty was set to \(215\%\) of the same value. The second and third levels were obtained by doubling and tripling these values, respectively. A similar process was performed for the demand targets, where the on-time-arrival penalty was set to the cost of the most expensive service, while the first level of the maximum-delay penalty was set to \(175\%\) of the same value. To address the single-target formulations, we set the penalties to 0 for the target not considered in that experiment.
5 Experimental Results and Analysis
All the analyses were performed considering the 6 demand classes derived by the combined use of the 3 levels of demand and the 2 delivery-time windows. We generated 10 instances for each demand class, for a total of 60 deterministic instances. For each deterministic instance, 36 stochastic instances were constructed, combining the first 4 levels of variability, 3 ranges, and 3 penalty rates.
A solution, whether for the deterministic variant (SSND) or for the stochastic one, consists of a set of selected services and the paths used to transport commodity flows to their destinations. Solutions were found to the three stochastic formulations considering a set of 30 scenarios after having verified in-sample and out-of-sample stability [11] (more details on this analysis are available in [12]). Stochastic solutions are identified in the following as SSND-QST for the complete formulation, SSND-QST-S and SSND-QST-D when only the service or the demand targets, respectively, were considered.
5.1 Evaluation Analysis: Benefits of Stochastic Formulation
The purpose of this analysis is to quantify the benefits of explicitly considering time-stochasticity into the model rather than using a traditional deterministic assumption. It is composed of two parts. The first is a comparison of set-up costs (service selection plus routing costs) and full costs (the set-up costs plus the penalties incurred for delays) of a network. The second focuses on the estimation of the observed delay probability distributions. The latter as well as the full costs are estimated through a Monte Carlo-like simulation procedure by considering a set of 100 scenarios.
Table 1 displays the average set-up and full costs for instances belonging to the third demand class that were solved with increasing level of variability and the highest penalty level. The SSND always yields the same service network configuration, no matter how variable are travel times distributions. The stochastic SSND-QST-S set-up costs are generally similar to those of the corresponding deterministic SSND, but the structure of the service network is markedly different. As we will see in next section, in almost all cases, less services operate in SSND-QST-S than in SSND and multi-stop services are replaced by direct services. This trend is more present as the variability increases, resulting in a slight increase of activation costs. SSND-QST-D networks appear to be built to bring commodity flows as early as possible to destination, at least one period before due date. Such a behaviour requires more services to be selected and leads to an increase in set-up costs with respect to SSND. SSND-QST-S and SSND-QST-D display full costs that are always lower than the cost of the corresponding SSND. This shows that explicitly considering the stochastic nature of the travel times in the tactical planning model may hedge against, or at least reduce, the effects and consequences of uncertainty, despite an initial higher set-up cost. The general SSND-QST yields service designs that appear as a compromise between SSND-QST-D and SSND-QST-S, displaying both the lowering-service and early-freight-arrival trends. It is the service targets, however, that influence the SSND-QST the most.
We now focus on the delays observed over the set of 100 scenarios through simulation. We report a number of statistics to evaluate and compare the delay distribution performance of deterministic and stochastic solutions, the latter belonging to the third demand class with the highest level of variability and the highest penalty level. The average observed delay (as well as the average observed short and long delay), the minimum and maximum observed delay (bringing also to the range of the distribution), and standard deviation and \(3^{rd}\) quartile, as measures of dispersion, are reported in Table 2 for SSND, SSND-QST-S, SSND-QST-D and SSND-QST. For the latter case, service and commodity delays are summed together.
Given how the model was formulated, not surprisingly, the average delays of stochastic solutions are always lower than SSND. The higher delay reduction always belongs to the longest type (which is also the most penalized). SSND-QST, SSND-QST-S and SSND-QST-D always outperform SSND in all the chosen statistics, defining observed delay distributions which are consistently better than SSND in terms of range and dispersion of observations. In all cases, the third quartile of stochastic observed delay distributions is lower than the average observed delay of SSND. This defines a set of positive-skewed (that is, the mass of the distribution is concentrated on the left of the mean), shifted on the left with shorter and less dense tails stochastic observed delay distributions compared to the deterministic ones. Figure 2(a), (b) and (c) respectively show the above described distribution for SSND-QST-S, SSND-QST-D and SSND-QST compared to the observed delay probability distributions for SSND.
5.2 Structural Analysis: Reducing Delay Risk Techniques
The purpose of this analysis is to identify the features that stochastic solutions exploit to hedge against time uncertainty.
The SSND displays, in general, characteristics typical of consolidation-based transportation networks, where different commodities share the capacity of single services for most of their journeys, passing through several intermediary stops, where they often wait idle, before arriving at destination. One also observes just-in-time arrivals, with respect to due dates, of freight at destination. Furthermore, one-stop services are usually favoured when possible, rather than no-stop services in order to lower the fixed costs.

Delay probability distributions
In almost all cases, less services operate in SSND-QST-S than in SSND, even though the two solutions share part of them. The most remarkable feature relates to the decrease of multi-stop services activation, which are the most sensitive to risk of delays. Thus, if a service experiences a delay in its first leg, it will most likely arrive at destination (its second stop) later than scheduled, unless, in the second leg, the observed travel time is much lower than normal and absorbs the delay. Given the assumed distributions, complete absorption is not very likely and one-stop services have a higher risk of paying for delays. Consequently, the model would move the solution away from less-expensive multi-stop services to more expensive direct connections, lowering the risk of extra costs when the services operate. The observed trend of SSND-QST-S solutions is thus to select only the strictly necessary direct services to fulfill demand by replacing multi-stop services with direct services. As fewer services are available, commodity paths will be more tangled and involve more services and transfers, the latter implying additional idle time at intermediary terminals. SSND-QST-D networks are built to bring commodity flows as early as possible to destination, at least one period before due date. When avoiding just-in-time arrival is not possible for the total quantity of a commodity, the flow is sometimes split and a major part is shipped in advance. Such a behaviour requires, generally, a higher number of services (and higher set-up costs, as seen) compared to SSND. Table 3 displays the average number of direct and multi-stop services activated in SSND-QST-S and in SSND and the percentage amount of early and just-in-time freight arrivals in SSND-QST-D and in SSND for the same demand classes, scenario classes, and penalty level considered above.
When both targets are simultaneously considered, the same not-direct-services and early-freight-arrivals oriented trends are observed. Nevertheless, the coexistence of these two components cause changing in the network at a slower rate when compared to SSND-QST-S or SSND-QST-D (see Table 4).

SSND vs. SSND-QST-S

SSND vs. SSND-QST-D
It is clear that such features are fostered only by the stochastic formulation of the problem and would have never been found and exploited with a traditional time-deterministic formulation. How do these features eventually change network design configurations? Figure 3 displays an example of how SSND and SSND-QST-S differ from each other. Dashed arrows represent multi-stop services while solid arrows stand for direct services. The amount of commodity shipped is depicted on each service arc (three commodities are considered, differentiated by underlines). In the SSND two multi-stop services are activated. In SSND-QST-S the multi-stop services are avoided and replaced by either their parallel direct services or by services traveling on a complete different route. In fact, the multi-stop service traveling from hub 1 to hub 3 passing through hub 2 is replaced by two direct services, the first traveling from hub 1 to hub 5 the second from hub 5 to hub 3.
Figure 4 displays, instead, the paths of commodity 11 (dashed arcs) and commodity 24 (solid arcs). The amount of freight shipped on each arc is reported. In SSND-QST-D, both commodities are shipped well in advance following the same physical paths as SSND, but shifted one period before. In this specific example, if a delay is observed in the last segment of commodity paths of SSND, it would involve the \(82\%\) of its total amount, as opposed to SSND-QST-D, where it will be 0 thanks to the early-freight-arrivals trend.
5.3 Comparative Analysis: Impact of Parameters
The goal of the last analysis is to investigate how the values of the parameters of the stochastic model may change the performance of stochastic solutions. Solutions are thus obtained by varying one of the parameters at a time, keeping all the others fixed.
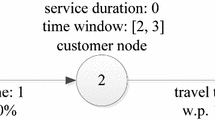
We first consider the impact of the amplitude of delivery-time windows, which plays an important role when demand-target is considered. Consider the case depicted in Fig. 5. The origin in space and time of a load is represented by vertex 1. We compare two cases; in the first, the due date is right after the availability date, while in the second, the due date is after 2 periods with respect to the availability date, respectively vertices 3 and 4. Two parallel potential services are available to ship the load, labelled service 1 and 2 with the same cost of activation. In the first case, no other possibility than service 1 may be considered in both SSND-QST-D and SSND. The commodity leaves immediately its origin and is shipped with service 1 to its destination, vertex 3, without any idle time. In case two, SSND-QST-D will always choose service 1 in order to consistently be on time and not pay additional penalty costs (taking advantage of one period of idle from 3 to 4), which is not guaranteed if service 2 would be chosen. In a deterministic setting, service 1 would never be favoured with respect to 2. Privileging service 1 instead of 2 is thus a feature displayed only by the stochastic formulation of the problem. This feature however is strictly dependent on the time amplitude between entry and due dates of commodities. The narrower are availability and due dates the less the model is able to build a robust service network.

Impact of delivery-time window
The amplitude of the penalties for late arrival also directly influences both SSND-QST-D and SSND-QST-S designs. The penalties represent the need for reliability: the higher they are, the more reliability is requested. As a consequence, the higher the level of penalties, the more the model aims to build a service network that will perform as planned when travel times vary. Table 5 displays the increase in set-up costs and decrease in total delay, in percentages, for solutions obtained with penalty levels 2 and 3, compared to solutions obtained with penalty level 1. The same demand and scenario classes considered in the previous experiments were also used here. Focusing on the SSND-QST-S, the main delay decrease concerns the long and most expensive delay. The higher the penalty, the lower are such delays. Increasing penalties threefold yields an increase in the fixed cost of the network by around \(0.03\%\), with a decrease in the amount of total delay of around \(3\%\) for the short delays and \(10\%\) of the long ones. Similar results were observed for SSND-QST-D. The percentage of early freight arrivals is increased by \(8\%\) when the solutions based on the highest and lowest penalty levels are compared (total number of commodities is 25). The total amount of delay decreases of around \(8\%\) for the short delays and \(19\%\) of the long ones, at the expense of additional set-up cost of \(0.05\%\) only. Therefore, in response to a small increase of initial costs, high benefits may be observed in terms of reliability. Table 5 displays this analysis.
The level of variability influences SSND-QST-D and SSND-QST-S designs as well. Figure 6(a) show the percentage of direct and multi-stop activated services when the level of variability increases from level 1 to 3. Figure 6(b) shows instead the percentage of commodities delivered just-in-time and at least one period before under the same condition (commodities delivered at destination through a service arc are just-in-time deliveries). The higher the variability level the more the direct-service and early-freight-arrival trends are observed.

Variability effects

SDM vs. MIX case
We also considered a mixed-level variability case. The travel time probability distributions of physical links connecting vertex 1 to vertex 2 and vice versa have a high variability (level 3), while the remaining physical arcs a low one (level 1). Figure 7 shows how the structure of the shipment plan may change. The routes of two commodities are shown. In the SSND case, the services travelling along the more risky link 1–2 are used, since they establish a faster connection between those vertices. As opposed, in the MIX case, they are totally avoided and commodities are shipped through more tangled but also safer against high delays paths.
6 Conclusion
We proposed a study of the relations between the characteristics of a service network and its robustness in terms of respect of the service schedules and delivery due dates, given business-as-usual fluctuations of travel times. Very few papers in the literature address issues related to service network design and stochastic time, our contribution being, according to our best knowledge, the first to clearly address the issue of identifying the features a service design must have to gain in reliability. Such features define structurally different designs showing characteristics that a deterministic model would typically not produce. Several interesting research avenues are open. The introduction of uncertainty on terminal operations, an integration in a unique formulation of both demand and time uncertainty, the representation of more complex decisions/actions when delays are observed, addressing, for example, the case of missed connections are few examples of interesting paths to explore.
References
Assad, A.A.: Models for rail transportation. Transp. Res. Part A Policy Pract. 14, 205–220 (1980)
Chapman, D.G.: Estimating the parameters of a truncated gamma distribution. Ann. Math. Stat. 27, 498–506 (1956)
Christiansen, M., Fagerholt, K., Ronen, D.: Ship routing and scheduling: status and perspectives. Transp. Sci. 38(1), 1–18 (2004)
Cordeau, J.F., Toth, P., Vigo, D.: A survey of optimization models for train routing and scheduling. Transp. Sci. 32(4), 380–404 (1998)
Crainic, T.G., Hewitt, M., Toulouse, M., Vu, D.M.: Service network design with resource constraints. Transp. Sci. 50(4), 1380–1393 (2014)
Crainic, T.G.: Rail tactical planning: issues, models and tools. In: Bianco, L., Bella, A.L. (eds.) Freight Transport Planning and Logistics, pp. 463–509. Springer, Heidelberg (1988). https://doi.org/10.1007/978-3-662-02551-2_16
Crainic, T.G.: Network design in freight transportation. Eur. J. Oper. Res. 122(2), 272–288 (2000)
Crainic, T.G.: Long-haul freight transportation. In: Hall, R.W. (ed.) Handbook of Transportation Science, 2nd edn., pp. 451–516. Kluwer Academic Publishers, Norwell (2003)
Crainic, T.G., Kim, K.H.: Intermodal transportation. In: Barnhart, C., Laporte, G. (eds.) Transportation, Handbooks in Operations Research and Management Science, Chap. 8, vol. 14, pp. 467–537. North-Holland, Amsterdam (2007)
Crainic, T.G., Roy, J.: O.R. tools for tactical freight transportation planning. Eur. J. Oper. Res. 33(3), 290–297 (1988)
Kali, P., Wallace, S.W.: Stochastic Programming. Springer, Heidelberg (1994). https://doi.org/10.1007/978-3-642-88272-2
Lanza, G., Crainic, T.G., Rei, W., Ricciardi, N.: Service network design problem with quality targets and stochastic travel times. CIRRELT-2017-71 (2017)
Lium, A.G., Crainic, T.G., Wallace, S.W.: A study of demand stochasticity in service network design. Transp. Sci. 43(2), 144–157 (2009)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Lanza, G., Crainic, T.G., Rei, W., Ricciardi, N. (2018). A Study on Travel Time Stochasticity in Service Network Design with Quality Targets. In: Cerulli, R., Raiconi, A., Voß, S. (eds) Computational Logistics. ICCL 2018. Lecture Notes in Computer Science(), vol 11184. Springer, Cham. https://doi.org/10.1007/978-3-030-00898-7_27
Download citation
DOI: https://doi.org/10.1007/978-3-030-00898-7_27
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-00897-0
Online ISBN: 978-3-030-00898-7
eBook Packages: Computer ScienceComputer Science (R0)