
Abstract
This chapter starts with a description of the optics of camera-type eyes, in which an image is projected upon a retina with cornea and lens as refracting elements. Ray tracing is explained with the human eye as an example of a terrestrial vertebrate’s eye. Then the comparison is made to camera eyes of aquatic and amphibious animals, with an explanation of different kinds of aberrations, difficulties in accommodation to air and water as external media, and different solutions to these problems. A brief section deals with feedback regulation of eye development, and another one with eyes of particularly high light sensitivity. A section on compound eyes explains the difference between apposition and superposition eyes. It is pointed out that geometric optics (ray optics) is not adequate for analyzing the function of the small components of these eyes, and an introduction is given to waveguide and mode theory. This is followed by sections on antireflective nipple arrays, eyes with reflective optics, scanning eyes, and this chapter concludes with a treatise of the evolution of eyes.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Optics
- Cornea
- Elements
- Eye
- Superposition
- Compound eye
- Mirror optics
- Nipple array
- Scanning eye
- Waveguide
- Compound eye
- Mirror optics
- Nipple array
- Scanning eye
- Waveguide
15.1 Introduction
In this review of the different solutions of the optical problems of eye designs encountered in the animal kingdom, we shall not follow the course of evolution. Instead we shall start with our own eyes, as this is what the readers in general are likely to be most familiar with. The emphasis will thus first be on “camera-type” eyes, and later we will deal with compound and other types of eyes. The evolution of vision has recently been treated by Nilsson (2013) and Backfisch et al. (2013), and comprehensive accounts of animal eyes are provided by Land and Nilsson (2012).
15.2 The Human Eye
We assume that the reader has a basic knowledge of the structure of the human eye. It is probably a common misconception that the refraction of light necessary for the projection of an image on the retina is mainly due to the lens. In fact, 80 % of the refractive power is due to the curved external surface of the eye, at the outer surface of the cornea, because the difference in refractive index between the cornea and air is much greater than that between the lens and its surrounding media (aqueous humor in front, vitreous humor behind) (Fig. 15.1).

Longitudinal section of a human eye (schematic). The numbers indicate the numbering of interfaces used in the calculations in the text
To understand how the optical components of the eye function, and why evolution of eye design in different environments has given the results it has, we shall start with how light is refracted in spherical interface.
From the formula derived in the legend of Fig. 15.2, we can see that:

Refraction of light at a spherical interface between media with different refractive indices, n 1 and n 2. The radius of curvature is R, the center of the sphere O. A ray from A to B is refracted in the surface at a distance h from the line from A to B. The angle of incidence is α, the angle of refraction β. The shortest distance of A from the interface is a; that of B is b. For small values of h we have the following relations: h/R = sin(γ) ≈ γ; h/a = tan(α − γ) ≈ α − γ; h/b = tan(γ − β) ≈ γ − β. From this follows that h/R + h/a ≈ α ≈ sin(α) and h/R + h/b ≈ β ≈ sin(β). Since, according to Snell’s law (see Chap. 1), n 1sin(α) = n 2sin(β), it follows that n 1(h/R + h/a) = n 2(h/R + h/b), i.e., n 1(1/R + 1/a) = n 2(1/R + 1/b) (independently of h as long as h is small compared to R), or n 1/a + n 2/b = (n 2 − n 1)/R
-
1.
For fixed n 1, n 2, and R, the smaller is a, the larger is b.
-
2.
For fixed a, n 1, and n 2, the smaller is R, the smaller is b.
-
3.
For fixed a and R, the larger is the difference between n 2 and n 1, the smaller is b.
-
4.
For infinitely large a, i.e., point A at infinite distance, n 2/b = (n 2 − n 1)/R, or b = R ⋅ n 2/(n 2 − n 1). In this case, b is the focal distance of the refracting interface. The inverse value of b is called the refractive power or dioptric power of the interface. With b expressed in m, the refractive power will be expressed in diopters (= m − 1). Since the radius of the outer surface of the cornea is over 7 mm and the radius of the pupil less than 4 mm (in bright light much less), we can use the formula from Fig. 15.2 as a first approximation to judge the refractive power P 1 of the outer external surface of the eye using the dimensions in Table 15.1: P 1 = (n 2 − n 1)/(n 2 R) = (1.3777 − 1)/0.00777 m− 1 = 48.52 m− 1 (or 48.52 diopters or 48.52 D). As we can see in Fig. 15.1, the inner surface of the cornea is slightly more curved than the external surface, and the medium inside the cornea has a slightly lower refractive index, giving a negative contribution to the refractive power. Using the same formula again, we can calculate that the contribution from this interface is P 2 = − 6.34 m− 1.
Table 15.1 Properties of eye components
To get the total refractive power from these two interfaces, we would make no big error by just adding them: 48.52 − 6.34 m− 1 = 42.18 m− 1. But a more correct calculation is to take the distance between them, d 1,2 = 0.5 mm = 0.0005 m, into account using the formula P 1,2 = P 1 + P 2 − P 1 ⋅ P 2 ⋅ d 1,2/n 1,2 = 48.52 − 6.34 + 48.52 ⋅ 6.34 ⋅ 0.0005/1.3777 m− 1 = 42.29 m− 1. Here d 1,2 stands for the distance between the interfaces and n 1,2 for the refractive index of the medium between them. When we come to the lens below, the correction term is more important, because the thickness of the lens is greater than that of the cornea.
In analogy with the above, we can calculate the refractive power of the front surface of the lens to be P 3 = (1.4000 − 1.3371)/(12.40 ⋅ 0.001) m− 1 = 5.31 m− 1 and that of the back surface P 4 = (1.3377 − 1.4000)/(−8.10 ⋅ 0.001) m− 1 = 7.69 m− 1. Note that in the latter case, we use a negative value for the radius, since the center of the curvature is now in the direction from which the light is coming. The total refracting power of the lens is P 3,4 = 5.31 + 7.69 − 5.31 ⋅ 7.69 ⋅ 4.02 ⋅ 0.001/1.4000 m− 1 = 12.88 m− 1. We see that the refracting power of the lens is only about one quarter of that of the cornea. This is for an eye adjusted for vision at a distance. It is, as we shall see, different for an eye adjusted (accommodated) for vision at short distance and even more so for eyes of aquatic animals.
We can also make an estimate of the total refractive power of the eye: P eye = P 1,2 + P 3,4 − P 1,2 ⋅ P 3,4 ⋅ 16.4 ⋅ 0.001/1.3371 m− 1 = 48.49. This is just enough to focus light from a distant object on the retina in the back of the eye.
We must remember that all these calculations are a bit approximative, since they all depend on the approximations tan(α) ≈ α ≈ sin(α). The further we go from the optical axis, the less valid are these approximations. Furthermore, the refractive index of the lens is not constant, it is higher in the center than in the periphery, it varies with wavelength, and the interfaces where refractions occur are not perfectly spherical.
In Sect. 15.3, we shall come to a case where we cannot use the approximations used here and have to explore the function of an eye in another way.
The lens is elastic and has a tendency to contract radially and extend along the optical axis of the eye, i.e., increase the curvature of its refractive interfaces. This tendency is counteracted by the fibers in which it is suspended, which are stretched by the elasticity of the outer tissue of the eye. This in turn can be counteracted by the contraction of the ciliary muscle. So by the contraction of the ciliary muscle, the refractive power of the lens is increased. This regulation is called accommodation. In Fig. 15.3, we see a comparison of the shape of the lens when it is adjusted for distance vision and for near vision. Birds and reptiles also accommodate by changing the shape of the lens, although with different mechanical systems (Ott 2006). Amphibians and fishes accommodate in an entirely different way by moving the lens, and we shall soon understand why.

The shape of the human lens in an eye adjusted for vision at a distance (left) and on a nearby object (right)
15.3 An Eye in Water: The Problem
For a fish living in water, the refractive index of the water in front of the cornea is about 1.33, i.e., close to that of the optical elements in the eye in Fig. 15.1, with the exception of the lens. The materials of which a fish eye is built do not differ much from the corresponding materials of a human eye. This means that the outer surface of the cornea has almost no refractive power and the demands on the lens are much greater than for a terrestrial animal. Lens surfaces must be much more curved, and in general the lens of a fish eye has a spherical shape. This accentuates another problem: spherical aberration. To understand this, let us study the behavior of light passing through a sphere; we can take a glass sphere in air as example (Fig. 15.4).

Refraction of light in a homogeneous sphere
In Fig. 15.4, we see a ray of light entering from a medium with refractive index n 1 into a sphere of refractive index n 2 and exiting on the other side into the medium of refractive index n 1. We have drawn the incident ray as parallel to the horizontal optical axis, but this is not a special case. Because of the spherical symmetry, any direction can be chosen for the optic axis. We have also drawn the two radii of the sphere and continued their directions outside the sphere to show the incidence and refraction angles α and β. For the first refraction the angle of incidence is α and the angle of refraction β, since the radius is perpendicular to the sphere’s surface at the point of intersection. The relation between α and β, according to Snell’s law, is n 1 sin(α) = n 2 sin(β). Because two sides of the triangle between the center of the sphere are equal (= R), it is clear that the angle of incidence at the other refraction is β, and so the angle of refraction there must be α, again according to Snell’s law. Since the sum of angles in a triangle is π, the third angle in the isosceles triangle just referred to is π − 2β, and the angle γ is π − α − (π − 2β) = 2β − α. We express the angles in radians here and in the following calculations. The angle δ is π–γ–(the top angle in the triangle containing γ and δ). This angle, as can easily be seen in Fig. 15.3, is 2π − α − β, and it follows that δ = π − γ − (2π − π − β) = π − (2β − α) − (2π − α − β) = 2α − β − π.
We can now calculate the distance between the focal point and the center of the sphere as R ⋅ cos(γ) + R ⋅ sin(γ)/tan(δ). Using the other relationships we have derived, this can be expressed in terms of R, α, n 1, and n 2. If the glass sphere were to act as a good lens, this distance should be independent of the distance of the incident rays from the optical axis, but it turns out that this is not at all the case. In Fig. 15.5, we have traced the rays through a glass sphere of refractive index 1.538 immersed in water of refractive index 1.336. The further from the optical axis the rays impinge on the sphere, the shorter is the distance at which the rays intersect the optical axis. It is this deviation from good focusing that is called spherical aberration.

Propagation of light through a glass sphere with refractive index 1.538, immersed in water with refractive index 1.336. The inability of such a lens to focus sharply is a phenomenon known as spherical aberration
15.4 An Eye in Water: The Solution
The solution to this problem used by most fishes and many other aquatic animals is to develop a lens with a variable refractive index. We have seen that in a sphere with a uniform refractive index, the rays far from the optical axis are deflected too much to be focused at the same point as the more central rays. Thus, we can understand that to correct this, we have to have a lens which has a lower refractive index in the periphery.
It turns out that it is possible to have a good lens with this property and still retain spherical symmetry. The pattern of refractive index decrease from the center to periphery in the eye lens has now been measured for a number of aquatic animals. If we know the refractive index as a function of the distance from the sphere center, to trace the ray through the sphere, we need to keep track of how far we are from the center, and of course of the ray’s direction, to be able to compute how the light progresses from one point to another.
This is easiest to do if we use polar coordinates (Fig. 15.6), with the center of the sphere as origin and the angle θ between the optic axis and the point as one variable and the distance r from the point and the center of the sphere as the other variable.

Tracing of a light ray through a sphere with variable refractive index
The position of the tip of the advancing ray at any time is therefore described with the coordinates θ, r. We further use the following variables: n 0, n cort, and n core – the refractive index of the external medium, that of the peripheral part of the sphere, and that of the center of the sphere. The angle of incidence at the external surface of the sphere is α, and the refraction angle at this refraction is β. The relation between them is the usual Snell’s formula: n 0 ⋅ sin(α) = n cort ⋅ sin(β). We can then see from Fig. 15.6 that, as we follow the ray a short bit into the sphere and θ is increased by a small amount, dθ (much smaller than in the drawing), then r decreases by the amount dr = r ⋅ dθ/tan(β). When we know the decrease in r, we can compute the increase in refractive index, dnr, and then we know how much the light is refracted and can compute a new direction of the ray. In this way, we can continue to trace the course of the light through the sphere. This has been done in Fig. 15.7.

Light traversing a sphere with variable refractive index, highest in the center
The refractive index data for Fig. 15.7 is for a rainbow trout and has been taken from Jagger and Sands (1996). In this paper, the refractive index nr is given as the following function of the refractive index ncore in the center of the lens and ncort in the periphery, radial distance r from the center of the lens, and K = (n cort/n core) − 1, the latter of course not being an independent variable, but introduced as an abbreviation.
To use this formula in a convenient way in a computer program, to know how much we have to change the refractive index for each small change dr in radial position, we differentiate the expression:
Note that this expression is negative, because K is negative, but we get an increase in nr as we proceed inward in the lens, because then also dr is negative. Eventually both dr and dnr will turn positive, as the light starts to approach the surface of the sphere again.
Those readers who are interested in computing should now be able to implement a program for plotting figures such as Fig. 15.7 on their own computers. For other eyes there are various formulas like the one for nr above. See, for instance, one for the octopus lens in Jagger and Sands (1999) or a number of lenses in Jagger (1992). The cephalopod eyes and lenses, like that of octopus, although evolved along a different path, are in principle very similar to fish eyes and lenses (Jagger and Sands 1996) and are often referred to as an example of convergent evolution. Convergent evolution is a phenomenon encountered over and over in the study of eyes.
As we shall learn in the next section, the sphere is only an approximation of the lens shape in fishes. Nature is more sophisticated than that.
15.5 Another Problem: Chromatic Aberration
The refractive index of all substances varies with wavelength (a phenomenon known as dispersion), and except in the vicinity of absorption bands, it increases with decreasing wavelength. The refractive powers of the cornea and lens can therefore not be optimal for all wavelengths at the same time. For some wavelength regions we get imaging errors collectively known as chromatic aberration. We distinguish between longitudinal chromatic aberration, which means that the image is projected at the wrong distance in relation to the retina, and lateral (or transverse) chromatic aberration, meaning that the projected image has different size for different wavelength regions. We humans overcome this problem by having sharp vision over a wide wavelength range only in the fovea, a small area of the retina close to the optic axis of the eye, where the chromatic aberration has minimal effect. We also have no ultraviolet-sensitive cells as fishes (and many other animals) do; we even have few blue-sensitive cones in the area for sharpest vision, and the yellow pigment there decreases blur from blue and violet light. Finally, we have small pupils when the things we are looking at are well illuminated, so then we use only the central parts of the cornea and lens, further limiting chromatic aberration.
For fishes the chromatic aberration constitutes a more severe problem. Generally they cannot restrict the pupil, so it is large even in strong light. A spherical shape of the lens is much worse from the viewpoint of chromatic aberration than our “lens-shaped” lens, and many fishes have ultraviolet vision (some are also sensitive to light of longer wavelength than we are). But fishes have their tricks, too. Kröger and Campbell (1996) found that the longitudinal chromatic aberration was less than predicted from lens dispersion in several fishes. The reason for this was found (Jagger 1997; Kröger et al. 1999) to be that, for a fixed wavelength, different zones of the lens have different refractive powers, by having slightly different radii of curvature. This makes light from at least one zone produce a sharp image for each spectral band (although some blurring will be produced from the other zones). Another structural finesse which counteracts (longitudinal) chromatic aberration is that the light-sensitive outer segments of retinal cells tuned to different wavelengths are positioned at different depths in the retina, corresponding to the depths where the spectral bands to which they are tuned are focused.
The trick to have the lens divided into zones with different refractive powers would not work well for us, since our eyes are equipped with an iris that contracts in strong light. Thus, in strong light we use only the central part of the lens. But if you look into the eyes of a cat, you will see that it has a pupil which is not circular like ours but forming a vertical slit, which even when it closes lets the eye use peripheral parts of the lens. A goat, on the other hand, has pupils which are horizontal slits, with the same consequence.
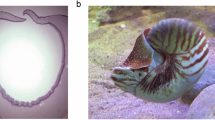
Nautilus, the mollusk with beautiful spiral shells, has a pinhole camera-type eye that has problems with neither spherical nor chromatic aberration, since its eye lacks lens as well as cornea. On the other hand, the visual acuity is low, especially in dim light when the pinhole in the iris has to open up to let more light in.
15.6 Problems and Solutions for Amphibious Animals
Terrestrial and aquatic animals each have their specific optical problems to solve in the adaptation of their eyes to their environments. What then about animals who live both in air and water? There are many such animals: penguins and wingborne sea birds, such marine mammals as whales and seals, as well as many reptiles and even fishes. One can imagine that their problems must be much greater than those of animals who have to adapt to a single external medium. We can just think of how blurred our own vision is when we go underwater without goggles.
For birds diving for fish, it can be assumed that it would be of great advantage to be able to see the fish clearly both from the air and immediately after the dive through the water surface. Can they do this? The question has been tested for some birds. Katzir and Howland (2003) found that cormorants accommodate within 40–80 ms upon immersion in water. The cormorant has relatively low visual acuity in air relative to birds of the same body and eye size adapted to air vision only, and underwater its acuity is comparable to the higher values reported for fishes and marine mammals (Strod et al. 2004). On the other hand, cormorants are able to fish in darkness during the long arctic night (Grémillet et al. 2005), so perhaps there has been no strong evolutionary pressure for sharp air vision in their case. Martin (1998) studied the eyes of albatross, which forage only in light. Albatross eyes have a flat cornea, which minimizes the change in refractive power of the eye upon immersion in water.
The bottlenose dolphin has a completely different eye, with a curved cornea and a spherical lens without accommodation capability (Litwiler and Cronin 2001), but a special shape of the pupil makes it possible for the dolphin to have almost the same visual acuity in air as in water (Herman et al. 1975). Herman et al. (1975) cite older literature about visual acuity for many other marine mammals. The harbor seal (Hanke et al. 2006) also has a largely curved cornea, but this has a central vertical strip that is flat and a pupil which closes to a vertical slit, so in sufficiently strong light, the seal has the same visual acuity in air and water.
Crocodiles, which have good distance focus in air (Fleishman et al. 1988), as well as some semiaquatic snakes (Schaeffel and Mathis 1991) surprisingly do not focus underwater, although they hunt underwater. On the contrary, some other snakes, even from the same genus (Natrix), possess an enormous accommodation ability. They can change the refractive power of the lens by over 100 diopters when they go from air to water, compared to some 15 diopters of accommodation in a human infant and a mere 1–2 diopters for the author at the age of 71.
The Atlantic flying fish seems to be able to select a suitable landing site among seaweed by means of vision. Instead of a smoothly curved cornea like those of most fishes, it has a pyramid-shaped one with three flat “windows.” Measurements show that this allows it to see reasonably well at a distance during its flight (Baylor 1967; Fig. 15.8).

The Atlantic flying fish has a pyramid-shaped cornea with three flat “windows” (From Baylor 1967)
A somewhat similar arrangement, but with two flat windows, is present in another fish, Mnierpes macrocephalus, living in the intertidal region (Graham and Rosenblatt 1970), and also in Coryephoblennius galerita, a fish living on rocky shores, which frequently makes excursions out of the water (Jermann and Senn 1992). The latter has one flat cornea window pointing up and a curved one pointing down. The most interesting is the “four-eyed fish,” Anableps anableps (Fig. 15.9). It is a minnow living in freshwater pools in Central and South America and catching prey both in the water and above it. It swims with the eye exactly at the water surface. The eye has separate retinae for looking in the water and looking in the air but uses the same oblong lens for both retinae.

(Top) Anableps swimming at the water surface (After Saidel and Fabiane 1998). (Bottom) Light micrograph of longitudinal section through eye of Anableps. DR dorsal retina, for looking up into the air, VS and VCE layers of the corresponding ventral cornea, VR ventral retina for looking into the water, DS and DCE layers of the corresponding dorsal cornea. Note that the lens is flatter in the direction for looking in the air than in the direction for looking in the water (From Swamynathan et al. 2003)
Some crustaceans, and at least one mollusk (Land 2000), also have separate optical systems for different purposes, but in most cases both systems are then below the water’s surface.
15.7 Feedback Regulation During Eye Development
How come everything fits together so well in an eye? The cones (or rhabdomeres in the arthropod eyes to be described later) with different spectral sensitivities must be properly connected to the correct brain cells, otherwise the animal could not distinguish blue from green. The lens must focus the image sharply on the retina. We have seen that eyes can accommodate by moving the lens or changing its shape, but that can only be done to a degree. And what causes the lens to have the proper refraction index gradient? A fish can grow from almost microscopic size to become bigger than a human, and throughout this development the eye must be able to produce sharp images to remain useful.
The answer can to a large extent be summarized in one word: feedback. The eye sends signals to the brain, and if the brain finds that the image is not good enough, it sends signals back to the eye to correct the situation. Accommodation is, of course, one result of such feedback, but the brain feeds back also to developmental processes. The refractive index gradient can be affected (Kröger et al. 2001), as well as the size of the eye (Kröger and Wagner 1996).
If animals are reared in red light, the kind of visible light refracted least by the eye, the eye will develop in such a way that if the animals are transferred to blue light, the image will be projected in front of the retina. Conversely, if they are reared in blue light and then transferred to red light, the red light will be too weakly refracted, and the image will be projected behind the retina (Kröger and Fernald 1994).
The most dramatic experiments have been carried out with chicks supplied with eyeglasses with positive or negative lenses. In such experiments, it has been shown that the growth rate of the eye components is affected in a matter of hours by the distorted vision (Zhu et al. 2005).
15.8 Eyes with Extreme Light Sensitivity
We have probably all noticed how night-active animals reflect the light from the car’s headlights with their eyes. They have a reflective tapetum, a mirror, behind the light-sensitive cells, which directs any light that has escaped being caught in the first pass back through the light-sensitive layer.
The oilbird, Steatornis caripensis, lives in caves in Venezuela and Trinidad and flies out only at night to pick fruits in the forests in Venezuela. Thus, it never experiences light stronger than full moonlight. In the cave, it also echolocates like bats, but vision is an important sense, as one can see from the construction of its retina (Martin et al. 2004; Fig. 15.10). In the human eye, the ratio between the diameter of the fully dilated pupil and the length of the eye is approximately 0.3. In the oilbird eye it is 0.56, which means that the irradiance of the retina can be made 3.5 times that of the human eye for the same ambient lighting. The retina is packed with rods (the most light-sensitive kind of cell in vertebrates) and has only few cones. There are a million rods per square millimeter of retinal surface, as compared to a maximum of about 160,000 in the human retina. The high density of rods is possible in part because the rods are thin, but in addition they are packed three tiers thick. Light that penetrates the first layer may therefore be absorbed in the second or third. Surprisingly, though, the oilbird seems to lack a reflective tapetum. Also many deep-sea fishes have a tiered or, as the term of the trade goes, a “multibank” retina (Wagner et al. 1998).

Part of the retina of an oilbird with multiple layers of rods (From Martin et al. 2004)
15.9 Compound Eyes
As far as we know, the first sophisticated eyes to evolve were compound eyes. Of these early eyes, those of trilobites (Fig. 15.11) are best preserved (some for more than half a billion years), partly because they had lenses made of calcite. Some of them are thought to have had bifocal lenses, so they could be used to see both nearby and more distant objects (Gál et al. 2000). A survey of the different types of trilobite eyes is given by Thomas (2005).

The Devonian trilobite Erbenochile erbeni (see Fortey and Chatterton 2003) from the back (a) and side (b). This animal could see in all horizontal directions at once and had an eyeshade (arrow) above each eye to protect from light from the water surface. In the Devonian, there were no birds in the sky to worry about (Copyright the Natural History Museum, London. Reproduced with permission)
Compound eyes in extant animals are known mainly from crustaceans and insects but are present also in some other animals, such as horseshoe crabs. They can be broadly classified into apposition and superposition eyes (Fig. 15.12), and both these categories are present in both crustaceans and insects. Excellent reviews have been published by Horridge (2012) and by Land and Nilsson (2002), and compound eyes are treated also by Horridge (2005) and in a book edited by Warrant and Nilsson (2006). Here only a brief introduction will be given.

In an apposition eye (left) composed of several ommatidia, each ommatidium separately receives light from one direction. In a superposition eye (right), light from one direction is, via the lenses of several ommatidia, focused on the light-sensitive part (rhabdom) of one ommatidium. The superposition eye shown here works by refraction optics, but there exist also those with reflection optics (e.g., Gaten 1994; see also section 15.11 on mirror optics below) and those with a combination of refraction and reflection optics
The optical system of a superposition eye is so constructed that an erect image is formed on the array of rhabdoms (the retina), not an inverted image as in our eyes. In general, animals adapted to strong light have apposition eyes, those adapted to dim light have superposition eyes, but some dim-light-adapted animals have rather light-sensitive apposition eyes, and some adapted to strong light have superposition eyes (e.g., Belušič et al. 2013). Acclimation to different light conditions can be achieved by the movement of pigment grains.
A compound eye in a small animal cannot attain the resolutions provided by good camera-type eyes. As one of the pioneers (Mallock 1894) in the study of this subject put it: “The best of the [compound] eyes… would give a picture about as good as if executed in rather coarse wool-work and viewed at a distance of a foot.” But recent research has revealed that some eyes are a little better than previously thought (see below). The spatial or angular resolution of eyes can be measured and expressed in different ways, and distinguishing two bright points from one another is not the same as being able to resolve a pattern of equally sized parallel white and black lines. Applying the latter, most commonly used, criterion, we can say that even the best compound eyes seldom resolve better than 1–2°. Only the largest eyes of dragonflies and praying mantis are about four times better than that, while we can resolve about 1 s of arc, and raptors such as eagles can do even better (see Gaffney and Hodos 2003 for a table of visual acuity for different birds).
Because of the small dimensions of the components of compound eyes, their function cannot always be analyzed with the kind of optics (“ray optics” or “geometrical optics”; Fig. 15.13), which we used for camera-type eyes above. Instead one must for insects with very thin rhabdoms use “physical optics,” in which the electromagnetic wave nature of light is taken into account. To fully appreciate the following treatise, the reader is advised to first read Sect. 1.2 in Chap. 1.

Light propagating along an internally reflecting cylinder according to ray optics
One aspect of physical optics often encountered when dealing with the function of compound eyes is “propagation mode theory.” This is a very complicated topic and is easily misunderstood. For one thing, the term “mode” has several meanings, which are often confused. The propagation mode we shall be dealing with here is different from cavity mode or some other terms used when dealing with laser technology, but we shall just call it “mode” in the following. Considerable simplification of the full mode theory can be used when variations of refractive index are as small as in complex eyes (Snyder 1969), but even the simplified theory is something for the real experts (as can be understood from just reading the title of Snyder’s treatment in the reference list below), and here I shall give only a nonquantitative account, with only very simple mathematics, to give the reader a feeling of what mode theory is about.
In an object (“light conductor”) consisting of a light-transmitting medium for which some dimensions are of about the same size as the wavelength of light, light cannot propagate in as many ways as in a larger space. Such a light conductor can be a thin fiber used to transmit telephone signals, but it can also be an ommatidium in a complex eye (actually the rods and cones in our own eyes also behave in such a way, and an accurate treatment of their optics also requires physical optics and mode theory). A mode is a set of guided electromagnetic waves in the light conductor. We shall assume in the following that the light conductor is approximately cylindrical and that the radius of the cylinder is not larger than the wavelength of the light it conducts. (Some light-conducting structures in real eyes are, it is true, far from cylindrical, but the cylinder approximation will be enough to get a qualitative understanding.) The cylindrical space itself has a higher refractive index than the surrounding, so the cylinder is delimited by the boundary between two media with different refractive indices.
Taking only ray optics into account, light rays can be described as bouncing in any way between the walls of the cylinder, as long as angles of incidence exceed the critical angle (Fig. 15.13) and equal the angles of reflection. But according to mode optics, only certain modes can travel along the conductor, namely, those for which the wavelength has a certain relation to the diameter of the light conductor (Fig. 15.14).

Electric fields of modes propagating in a cylindrical light guide. The arrow shows the direction of light propagation and also the direction in which field strength is plotted. Note that with increasing mode number, more and more of the electrical field, and thus the electromagnetic energy (which is proportional to the square of the field strength), appears outside the fiber
In geometrical optics, we treat light as if it is exactly restricted to a certain space, as there exists, for instance, in front of a mirror, but not at all inside a mirror. But as we have already seen in the treatment of near-field microscopy in Chap. 5, this no longer holds exactly when we go to very great detail and small dimensions. We have something called the “near-field,” a part of the electromagnetic field which goes a little bit outside the limits set by geometrical optics. Therefore we shall not be surprised that the waves representing the modes in Fig. 15.14 extend a little beyond the boundary between regions of different refractive indices. The higher the mode order, the further outside the border does the mode penetrate, and the higher is the probability that light will escape to the external medium.
To compute how many modes that can propagate in a light conductor, it is convenient to introduce the concept of normalized frequency, V (also referred to as the waveguide parameter or V number). This is a dimensionless number: Here a is the diameter of the conductor. If V is below 4.810, only one mode can propagate. From this it can be understood that in animal body structures, where the differences in refractive indices are small, not many modes can propagate. The number of modes is dependent on the refractive indices, so for a proper analysis, these must be very accurately determined. Note that
(n21-n22)=(n1-n2) • (n1+n2)
we can use the formula to make a quick estimate of how light (we assume a wavelength of 500 nm) propagates in the ommatidium of a compound eye of a honeybee. The rhabdom, the light-sensitive structure to the right in 15.15, has a diameter of 4,000 nm and a refractive index (n 1) of 1.347, as compared to the refractive index of the surrounding substance (n 2), 1.339.
Thus, V = 2π(1000/500) ⋅ (1.3472 − 1.3392)1/2 = 2π ⋅ 2 ⋅ (0.008 ⋅ 2.686)1/2 = 1.84, and in this structure only one mode can propagate. The crystalline cone (to the left of it in the diagram), as the name implies, has a conical shape rather than a cylindrical one, but since most of it has a diameter much larger than the rhabdom, and the refractive index difference at the boundary to neighboring cells is 3.7 times larger, we can guess that more than one mode can propagate in it. As we shall see below, interesting things can happen in the junction between the crystalline cone and rhabdom. Different modes are associated with different energy distributions in the cross section of the conductor (and in the near field outside it). The total energy distribution of all the modes is not obtained by adding the energy distributions but by adding the electromagnetic fields of the modes and squaring the sum, provided that the modes are coherent (in step with one another, in analogy with the famous Young’s double-slit experiment).
As an example of where the mode theory can lead us, I shall try to explain a discovery which also illustrates what was said above: “recent research has revealed that some eyes are a little better than previously thought.” Nilsson et al. (1984) and van Hateren and Nilsson (1987) found that the vision of certain butterflies with apposition eyes is sharper than what could be explained with simple-minded optics. The lens projects a bright point in the environment as an Airy disk into the crystalline cone (Fig. 15.15). This Airy disk is wider than the rhabdom in that particular ommatidium, and consequently one might think that the neighboring rhabdoms would be affected by light from the bright point.

Outer part of an ommatidium in the apposition eye of the honeybee, Apis mellifera. To the right is the outermost part of the light-sensitive structure, the rhabdom (all of the rhabdom not shown). It has a cross section of 1 μm (1,000 nm) (Adapted from Varela and Wiitanen 1970)
However, in this case the dimensions of the rhabdom are such that two modes can propagate in it (can “be excited,” as the jargon goes). The cross-sectional pattern of the electromagnetic field of the sum of these modes corresponds very well to the pattern of the Airy disk, with the consequence that the light from the bright point is conducted into only one rhabdom and the image in the butterfly brain will be sharper than it would otherwise be.
15.10 Nipple Arrays on Insect Eyes
As was briefly mentioned in Chap. 1, some insect eyes carry tiny structures on their lenses that decrease reflection of light from them (Fig. 15.16). The biological advantage is probably not primarily to gain more light for vision, but to decrease the risk of being spotted by enemies.

Left, in surface view: corneal nipple arrays in the nymphalid Polygonia c-aureum (a) and the lycaenid Pseudozizeeria maha (b), showing differences in nipple height and shape. The bar is 500 nm. Right, in longitudinal section: corneal nipple arrays in the nymphalids Bicyclus anynana and Polygonia c-aureum (c, d), the pierid Pieris rapae (e), the lycaenid Pseudozizeeria maha (f), and the papilionid Papilio xuthus (g). Bars are 500 nm (From Stavenga et al. 2006)
During an electron microscopic work on photoreceptor structures in a night moth, Bernhard and Miller (1962) discovered that the corneal surface carried cone-shaped protuberances termed nipples, about 200 nm in height and arranged in a hexagonal array. The antireflective effect of the nipple array was shown in microwave experiments on lens models scaled to the frequency of the microwaves (Bernhard et al. 1963, 1965) as well as in comparative spectrophotometric measurements on corneal fragments from insects with nippled and non-nippled facets (Miller et al. 1966).
Recently interest in and study of these structures have increased, partly due to the possibility of technical applications. A detailed analysis of the corneal nipple arrays of several moth and butterfly species has been carried out by Stavenga and coworkers (Stavenga et al. 2006). They modeled the reflectance from dimensions and optical theory. It was found that the reflectance of the eyes decreases with increasing nipple height. Nipples with a paraboloid shape and height 250 nm, touching each other at the base, almost completely eliminate the reflectance for normally incident light.
Nipples and similar antireflective structures do not occur only in the order Lepidoptera but also in Trichoptera and, although with smaller height, in some Diptera (Bernhard et al. 1970). In a very small moth with tiny eyes, instead of nipples, the cornea has a system of regular, radial ridges, spaced about 250 nm apart. For such eyes, operating near the diffraction limit, this was judged to be a better arrangement (Meyer-Rochow and Stringer 1993).
15.11 Eyes with Mirror Optics
The eyes treated so far have refraction optics, but (as is the case with telescopes and some other man-made instruments) eyes can also have mirror (reflection) optics or a combination of refraction and reflection optics. How biological mirrors themselves are constructed and function is described in Chap. 10, so we will skip this subject here. One place for reflectors in eyes has already been touched upon, namely, those in the tapetum behind the light-sensitive cells, which let light pass a second time through them and thus increase the light sensitivity.
Only a couple of examples of reflection optics will be described here, and the reader is referred to Land (2000) for details and further examples.
One eye that combines refractive and reflective elements for projecting an image on the retina is that of a scallop. It has a lens like a normal camera-type eye, but the lens alone has no enough refracting power to produce a sharp image at the retina; it would fall far inside the eye. But the curved surface of the eye bottom reflects the rays back to converge on the retina in front of it from behind (Fig. 15.17).

Scallop eye, schematic (Modified after Land 2000). The sketch to the left shows where the image would fall if formed by the lens alone (dash-dot rays) and where it actually is projected after reflection at the bottom of the eye (solid line rays). The sketch to the right shows more in detail how a beam of light parallel to the optical axis is focused
For some time it was unknown how decapod crustaceans like crayfish, lobsters, shrimp, and prawns can see, until Vogt (1975, 1977) discovered that their compound superposition eyes have reflection optics. The principle is shown in Fig. 15.18. Note that the corneas are flat. The material below them does not have a refractive index so that it can produce an image. It is instead the reflective walls of the ommatidia that direct the light to the rhabdoms. The diagram shows the ommatidia in a light-adapted state, where pigment grains (gray) separate the ommatidia optically from one another. In a dark-adapted eye, the pigment grains are positioned in such a way that they do not separate the rhabdoms. In the upper center is a tangential section of the eye near the surface, and it can be seen that the ommatidia are square in cross section, not hexagonal as most ommatidia in insects.

Crayfish eye (From Vogt 1980). To the left are two ommatidia from the compound superposition eye. To the right is a diagram showing how a light ray is reflected against the walls of an ommatidium on its way to the rhabdom, and at lower center one which shows the ray tracing in the whole eye for light from a distant point. The upper center is a surface view of the eye showing the square facets
It is interesting that a description of the reflection optics in compound eyes in a popular science magazine (Land 1978) inspired a design of an x-ray telescope for astronomy (Angel 1979; Lee and Szema 2005). X-rays cannot be deflected by ordinary lenses, and one must use either reflecting optics or so-called zone plates, based on diffraction, somewhat resembling transmission gratings, but with circular geometry.
15.12 Scanning Eyes
Both camera-type eyes, like ours, and compound eyes view a large solid angle “in one bite.” This is different from a television camera, which scans the visual field point by point. We have examples of this way of imaging in the animal world, most pronounced in small crustaceans belonging to the copepods. The best studied genera are Copilia (Figs. 15.19 and 15.20) and Sapphirina. These animals have two eyes, each with a very large (in relation to the body size) lens in front of the body, and deep in the body a smaller lens and a very tiny retina. The retina is so small that almost only one point at a time can be projected upon it. But the retinae of the two eyes oscillate sideways at a rate of up to 5 s–1 min, getting alternatingly closer and further apart. In this way, they scan a thin strip of the visual field.

The front part of the body of Copilia quadrata. The width is about 1 mm. The approximately 2-mm-long tail is not visible (From Gregory et al. 1964)

Sketch of a Copilia eye (left) and detail of the inner part (right) (From Wolken and Florida 1969)
Copilia and Sapphirina can be regarded as extreme cases of a common theme. They can image only two points at a time (one with each eye) and over a short time almost only a line. But scanning eye movements are common, not only in other crustaceans like Daphnia (Frost 1975) and crabs (Sandeman 1978) but also in spiders, mollusks (Land 1982), and other animals. In these cases, the retina is not quite as small as in Copilia and Sapphirina, but nevertheless the eye movements expand the visual field. Even unicellular organisms like Euglena or dinoflagellates, which rotate during their swim and thereby let a shadow from a pigment spot intermittently fall on the light sensor and thereby determine the light direction, can be said to use a related principle.
In fact, we ourselves carry out small unconscious eye movements called saccades all the time, but these have a different function. In our case, it is thought that these eye movements counteract a shutdown of the signals from the retina, which would be the case if the same stimulus was maintained on the same spot over a long time. It is thought that the jerky flight of some insects with fixed eyes serves the same purpose.
The tiny eyes of arthropods and other invertebrates have fascinated and inspired people from ancient times, over the years when magnifying glasses and primitive microscopes (Fig. 15.21) opened a new world, to our days. It has already been mentioned how the elucidation of the function of crayfish and lobster eyes helped astronomers to improved x-ray telescopes. The nipple arrays have been copied in solar energy collectors to help light get in but also in light-emitting diodes to help light get out (Iwaya et al. 2006). There are many more examples of how eyes have inspired technology (Lee and Szema 2005; Duparré and Wippermann 2006).

Robert Hooke’s (1665) drawing of the head of gray drone fly
This shows the importance of interdisciplinary communication, something which is also an aim of this book.
15.13 Evolution of Eyes
Most organisms have some way to sense the light, and many can also sense the direction of light. But we shall restrict the term eye to a structure which can sense the direction of light rather well and produce a kind of “picture” of the external world, but not necessarily as a projection on a retina. Although many pigments are employed as light sensors (see Chap. 13), only a group of chromoproteins collectively known as rhodopsins are used as sensors in eyes. The chromophores, which together with the protein moieties, the opsins, form the rhodopsins, are all closely related terpenoids known as retinals, although it has recently been found that in special cases chlorophyll derivatives are also involved in vision (Douglas et al. 1998, 1999; Isayama et al. 2006) and archaean rhodopsin can have a carotenoid as antenna chromophore (Balashov et al. 2005).
Rhodopsins occur throughout the three domains of life: Archaea, Bacteria, and Eukarya. The rhodopsins in Archaea are of a type, also occurring in Bacteria and Eukarya, which seems not to be involved in imaging vision and in the eyes, although they may act in light sensing (while some use light to pump ions in or out of cells). The type of rhodopsin involved in vision, having amino acid sequences quite different from those of “archaean” or “type 1” rhodopsins, occurs only within Bacteria and Eukarya. Both main types of rhodopsin may occur in the same bacterium, in which case the type 1 rhodopsins have probably been acquired by gene transfer from archaeans (Mongodin et al. 2005). Both main types of rhodopsin may have a distant common evolutionary relationship despite differences in amino acid sequence, since they share a seven-helix transmembrane structure (although some helices have been lost in some of them). There are also opsins which do not combine with the retinal and are not used for vision (Terakita 2005).
From this it seems likely that all eyes have evolved from a common light-sensing structure. Opinions about the later evolution differ among experts. Some believe that imaging eyes have evolved independently more than 40 (or even more than 60) times in different animal groups (von Salvini-Plawen and Mayr 1961, as cited by Gehring 2005), while Gehring (2005) argues strongly for monophyly, and Fernald (2000) can be said to take an intermediate position. There seems to be a deep evolutionary split between ciliary photoreceptors (as the rods and cones in our eyes) and rhabdomeric photoreceptors (as the ones in simple and compound eyes of arthropods). But Arendt et al. (2004) found both ciliary and rhabdomeric photoreceptors in the same animal species, a rag worm.
At least in part the differences between “monophylogenists” and advocates of convergent evolution are to some extent due to terminology confusion. “A has evolved from B” or “A is homologous with B” was clear as long as scientists had only visible morphological characters to consider. When molecular phylogeny emerged, the terminology for a while became blurred but is now beginning to clear up again. As Nielsen and Martinez (2003) point out, “homologous structures in two or more taxa are structures derived from the same structure in their latest common ancestor.” In that sense, all parts of all eyes are certainly not homologous. On the other hand, it has been clearly demonstrated that several of the genes and signaling systems for the development of eyes are related between animals as different as insects and vertebrates. The most dramatic has been the demonstration (Gehring 2005) that eyes can be induced on the antenna of a fruit fly by transfer of a mouse gene (Pax6) which induces eye formation in that animal or a similar gene from a fruit fly that induces eye formation in a toad (Onuma et al. 2002). It should be pointed out that Pax6 has other functions, too, and perhaps this and related genes are more generally involved in the organization of sense organs and nerve systems rather than specific eye organizers. A single Pax-type gene is present in the box jellies (cubozoans), where it is expressed both in parts of the eyes (retina and lens) and in the balance organs (Kozmik et al. 2003). Oakley (2003 a, b) contemplates the question of monophyly or polyphyly specifically for compound eyes. He presents evidence that the compound eyes of insects and crustaceans are homologous. But the group among crustaceans with compound eyes that he has particularly studied, myococopid ostracods, seems to have no close relatives or ancestors with compound eyes, so it seems that compound eyes have evolved again on that line. Oakley (2003b) suggests the possibility that “complex structures like eyes might not evolve de novo every time and many of the steps toward origin need not be repeated… genes or even whole developmental pathways may be retained during evolution, even in the absence of the morphological features where those genes were once expressed.” As a classic example, the existence of a latent developmental program was proposed to explain the experimental induction of teeth in chickens (Kollar and Fisher 1980; Gould 1983; Chen et al. 2000). In a more recent example, Whiting et al. (2003) suggested, based on phylogenetic distribution, that insect wings may be evolving by “switchback evolution.” This appears to me to be a very reasonable standpoint, and Harris et al. (2006) can now be added to the list of citations as an even more striking illustration.
Although the opsin part of rhodopsins are all related (with the exception of the archaeal type), and the chromophores are also related, there are differences in the details, not only in the opsin proteins, but also in the chromophores (Chap. 9) and in their biosynthesis. In eukaryotes, the retinal is formed by the oxygenation of β-carotene but in the cyanobacterium Synechocystis by oxygenation of a β-apocarotenal (Ruch et al. 2005). For the formation of 3-hydroxyretinal and 3-hydroxyretinol from the retinal in insects, one or, respectively, two more oxygenation steps are required, each using specific enzymes (Seki et al. 1998; Ahmad et al. 2006). All these oxygenations require molecular oxygen, and the pathways could not have evolved prior to the oxygenation of the environment. As in eukaryotes, the retinal in halobacteria is formed by oxygenation of β-carotene (Peck et al. 2001). Since the split between eukaryotes and archaeans is thought to be older than environmental oxygen, this indicates either parallel evolution or horizontal gene transfer, a question that could perhaps be solved by a comparison of the sequences of the various oxygenases.
The materials of the lenses have no common origin. The main proteins in vertebrate lenses, the crystallins (see Piatigorsky 2006), have nothing in common with the lens material in arthropods or mollusks, and lenses in some animals like trilobites (Thomas 2005) and brittle stars (Aizenberg et al. 2001) were or are made, wholly or in part, from an inorganic material, calcite.
One cannot but marvel when realizing how sophisticated the eyes or other light-recording structures are in some at first glance very “simple” animals, like the brittle stars (Aizenberg et al. 2001) or box jellies (Martin 2004; Nilsson et al. 2005), or even some unicellular organisms. Gehring (2005) shows pictures of various dinoflagellates having eye-like structures with lenses, light-sensitive regions, and pigmented areas within a single cell. Francis (1967) estimated the refractive index of the presumed lens of such an organism to be around 1.5, i.e., much higher than that of a human lens, which makes it even more likely that it really has an optical function. However, it is to go too far to speculate, as Gehring (2005) does, that a dinoflagellate structure could be an eye precursor, since the rather advanced eyes of trilobites probably evolved before dinoflagellates.
The lenses of brittle stars (Aizenberg et al. 2001) and of box jellies (Nilsson et al. 2005) have a surprisingly advanced construction, being able to produce images supposedly too sharp for the nervous systems of these animals to take full advantage of. In both cases, they have refractive index gradients of the same type as described above for the lenses in fish and octopus eyes. Also other echinoderms and cnidarians are sensitive to light. Some other members in these groups possess what can be described as crude vision. Sea urchins have been investigated in most detail (Ullrich-Lüter et al. (2011). Between their spines they have tube feet which have photoreceptive cells both at their bases and in their distal disks (Fig. 15.22). Depending on how many spines they have, their visual acuity varies between ca 30° (0.07 sr) for Echinometra species (Blevins and Jonsen 2004) to 10° (0.024 sr) for Strongylocentrotus purpuratus (Jackson and Johnsen 2011).

Tube foot expression of r-opsin in S. purpuratus. (a) Adult specimen. (Inset) Tube feet extended between spines. (b) Sp-opsin4 RNA probe (black) and antibody (yellow) clearly colocalize in disk photoreceptive cells. (c) Sp-opsin4-positive photoreceptive cells (red) at base (bPRCs) and disk (dPRCs) of primary podia in an early juvenile counterstained with anti-synaptotagmin B (green), a general echinoderm nervous system marker. (d) Disk photoreceptive cells arranged around the rim of an adult tube foot disk. Sp-opsin4 antibody labeling (red) (From Ullrich-Lüter et al. 2011)
A review of the dermal light sense that many animals possess is provided by Ramirez et al. (2011).
References
Ahmad ST, Joyce MV, Boggess B, O’Tousa JE (2006) The role of Drosophila ninaG oxidoreductase in visual pigment chromophore biogenesis. J Biol Chem 281:9205–9209
Aizenberg J, Tkachenko A, Weiner S, Addadi L, Hendler G (2001) Calcitic microlenses as part of the photoreceptor system in brittlestars. Nature 412:819–822
Angel JRP (1979) Lobster eyes as x-ray telescopes. Astrophys J 233:364–373
Arendt D, Tessmar-Raible K, Snyman H, Dorresteijn AW, Wittbrodt J (2004) Ciliary photoreceptors with a vertebrate-type opsin in an invertebrate brain. Science 306:869–871
Backfisch B, Rajan VBV, Fischer RM, Lohs C, Arboleda E, Tessmar-Raible K, Raible F (2013) Stable transgenesis in the marine annelid Platynereis dumerilii sheds new light on photoreceptor evolution. Proc Natl Acad Sci USA 110:193–198
Balashov SP, Imasheva ES, Boichenko VA, Antón J, Wang JM, Lanyi JK (2005) Xanthorhodopsin: a proton pump with a light-harvesting carotenoid antenna. Science 309:2061–2064
Baylor ER (1967) Air and water vision of the Atlantic flying fish, Cypselurus heterurus. Nature 214:307–308
Belušič G, Pirih P, Stavenga DG (2013) A cute and highly contrast-sensitive superposition eye – the diurnal owlfly Libelloides macaronius. J Exp Biol 216:2081–2088
Bernhard CG, Miller WH (1962) A corneal nipple pattern in insect compound eyes. Acta Physiol Scand 56:385–386
Bernhard CG, Møller AR, Miller WH (1963) Function of corneal nipples in compound eyes of insects. Acta Physiol Scand 58:381–382
Bernhard CG, Miller WH, Møller AR (1965) Insect corneal nipple array—a biological broad-band impedance transformer that acts as an antireflection coating. Acta Physiol Scand S 63(5- Suppl):243
Bernhard CG, Gemne G, Sällström J (1970) Comparative ultrastructure of corneal surface topography in insects with aspects on phylogenesis and function. Zschr Vergl Physiol 67:1–25
Blevins E, Johnsen S (2004) Spatial vision in the echinoid genus Echinometra. J Exp Biol 207:4249–4253
Chen Y, Zhang Y, Jiang TX, Barlow AJ, St Amand TR, Hu Y, Heaney S, Francis-West P, Chuong CM, Maas R (2000) Conservation of early odontogenic signaling pathways in Aves. Proc Natl Acad Sci USA 97:10044–10049
Douglas RH, Partridge JC, Dulai K, Hunt D, Mullineaux CW, Tauber AY, Hynninen PH (1998) Dragon fish see using chlorophyll. Nature 393(6684):423–424
Douglas RH, Partridge JC, Dulai KS, Hunt DM, Mullineaux CW, Hynninen PH (1999) Enhanced retinal longwave sensitivity using a chlorophyll-derived photosensitiser in Malacosteus niger, a deep-sea dragon fish with far red bioluminescence. Vision Res 39:2817–2832
Duparré JW, Wippermann FC (2006) Micro-optical artificial compound eyes. Bioinsp Biomim 1:R1–R16
Fernald RD (2000) Evolution of eyes. Curr Opin Neurobiol 10:444–450
Fleishman LJ, Howland HC, Howland MJ, Rand RS, Davenport ML (1988) Crocodiles don’t focus underwater. J Comp Physiol A 163:441–443
Fortey R, Chatterton B (2003) A Devonian trilobite with an eyeshade. Science 301:1689
Francis D (1967) On the eyespot of the dinoflagellate Nematodinium. J Exp Biol 47:495–501
Frost BJ (1975) Eye movements in Daphnia pulex (De Geer). J Exp Biol 62:175–187
Gaffney MF, Hodos W (2003) The visual acuity and refractive state of the American kestrel (Falco sparverius). Vision Res 43:2053–2093
Gál J, Horváth G, Clarkson ENK, Haiman O (2000) Image formation by bifocal lenses in a trilobite eye? Vision Res 40:843–853
Gaten E (1994) Geometrical optics of a galatheid compound eye. J Comp Physiol A 175:749–759
Gehring WJ (2005) New perspectives on eye development and the evolution of eyes and photoreceptors. J Hered 96:171–184
Gould SJ (1983) Hen’s teeth and horse’s toes. W.W. Norton, New York
Graham JB, Rosenblatt RH (1970) Aerial vision: unique adaptation in an intertidal fish. Science 168:586–588
Gregory RL, Ross HE, Moray N (1964) The curious eye of Copilia. Nature 201:1166–1168
Grémillet D, Kuntz G, Gilbert C, Woakes AJ, Butler PJ, le Maho Y (2005) Cormorants dive through the polar night. Biol Lett 1:469–471
Hanke FD, Dehnhardt G, Schaeffel F, Hanke W (2006) Corneal topography, refractive state, and accommodation in harbor seals (Phoca vitulina). Vision Res 46:837–847
Harris MP, Hasso SM, Ferguson MWJ, Fallon JF (2006) The development of archosaurian first-generation teeth in a chicken mutant. Curr Biol 16:371–377
Herman LM, Peacock MF, Ynkeer MP, Madsen CJ (1975) Bottlenosed dolphin: double-slit pupil yields equivalent aerial and underwater diurnal acuity. Science 189:650–652
Hooke R (1665) Micrographia: or, some physiological descriptions of minute bodies made by magnifying glasses with observations and inquiries thereupon. J. Martyn and J. Allestry, London
Horridge GA (2002) The design of the compound eye depends on the physics of light. In: Björn LO (ed) Photobiology: the science of light and life. Kluwer Academic Publishers, Dordrecht, pp 181–218
Horridge GA (2005) The spatial resolutions of the apposition compound eye and its neurosensory feature detectors: observation versus theory. J Insect Physiol 51:243–266
Isayama T, Alexeev D, Makino CL, Washington I, Nakanishi K, Turro NJ (2006) An accessory chromophore in red vision. Nature 443:649
Iwaya M, Kasugai H, Kawashima T, Iida K, Honshio A, Miyake Y, Kamiyama S, Amano H, Akasaki I (2006) Improvement in light extraction efficiency in group III nitride-based light-emitting diodes using moth-eye structure. Thin Solid Films 515:768–770
Jackson E, Johnsen S (2011) Orientation to objects in the sea urchin Strongylocentrotus purpuratus depends on apparent and not actual object size. Biol Bull 220:86–88
Jagger WS (1992) The optics of the spherical fish lens. Vision Res 32:1271–1284
Jagger WS (1997) Chromatic and monochromatic optical resolution in the rainbow trout. Vision Res 37:1249–1254
Jagger WS, Sands PJ (1996) A wide-angle gradient index optical model of the crystalline lens and eye of the rainbow trout. Vision Res 36:2623–2639
Jagger WS, Sands PJ (1999) A wide-angle gradient index optical model of the crystalline lens and eye of the octopus. Vision Res 39:2841–2853
Jermann T, Senn DG (1992) Amphibious vision in Coryphoblennius galerita L. (Perciformes). Experientia 48:217–218
Katzir G, Howland HC (2003) Corneal power and underwater accommodation in great cormorants (Phalacrocorax carbo sinensis). J Exp Biol 206:833–841
Kollar EJ, Fisher C (1980) Tooth induction in chick epithelium: expression of quiescent genes for enamel synthesis. Science 207:993–995
Kozmik Z, Daube M, Frei E, Norman B, Kos L, Dishaw LJ, Noll M, Piatigorsky J (2003) Role of Pax genes in eye evolution: a cnidarian PaxB gene uniting Pax2 and Pax6 functions. Dev Cell 5:773–785
Kröger RHH, Campbell MCW (1996) Dispersion and longitudinal chromatic aberration of the crystalline lens of the African cichlid fish Haplochromis burtoni. J Opt Soc Am A 13:2341–2347
Kröger RHH, Fernald RD (1994) Regulation of eye growth in the African cichlid fish Haplochromis burtoni. Vision Res 34:1807–1814
Kröger RHH, Wagner HJ (1996) The eye of the blue acara (Aequidens pulcher, Cichlidae) grows to compensate for defocus due to chromatic aberration. J Comp Physiol A 179:837–842
Kröger RHH, Campbell MCW, Fernald RD, Wagner HJ (1999) Multifocal lenses compensate for chromatic defocus in vertebrate eyes. J Comp Physiol A 184:361–369
Kröger RHH, Campbell MCW, Fernald RD (2001) The development of the crystalline lens is sensitive to visual input in the African cichlid fish, Haplochromis burtoni. Vision Res 41:549–559
Land MF (1978) Animal eyes with mirror optics. Sci Am 239:126–134
Land MF (1982) Scanning eye movements in a heteropod mollusc. J Exp Biol 96:427–430
Land MF (2000) Eyes with mirror optics. J Opt A Pure Appl Opt 2:R44–R50
Land MF, Nilsson DE (2012) Animal eyes (2nd ed.). Oxford University Press, Oxford, p 271. ISBN 978-0-19-958114-6
Lee LP, Szema R (2005) Inspirations from biological optics for advanced photonic systems. Science 18:1148–1150
Liou HL, Brennan NA (1997) Anatomically accurate, finite model eye for optical modeling. J Opt Soc Am A 14:1684–1695
Litwiler TL, Cronin TW (2001) No evidence of accommodation in the eyes of the bottlenose dolphin, Tursiops truncatus. Mar Mamm Sci 17:508–525
Liu YJ, Wang ZQ, Song LP, Mu GG (2005) An anatomically accurate eye model with a shell-structure lens. Optik 116:241–246
Mallock A (1894) Insect sight and the defining power of compound eyes. Proc R Soc Lond B 55:85–90
Martin GR (1998) Eye structure and amphibious foraging in albatrosses. Proc R Soc Lond B.265:665–671
Martin VJ (2004) Photoreceptors of cubozoan jellyfish. Hydrobiologia 530–531:135–144
Martin G, Rojas LM, Ramírez Y, McNeil R (2004) The eyes of oilbirds (Steatornis caripensis): pushing at the limits of sensitivity. Naturwiss 91:26–29
Meyer-Rochow VB, Stringer IA (1993) A system of regular ridges instead of nipples on a compound eye that has to operate near the diffraction limit. Vision Res 33:2645–2647
Miller WH, Møller AR, Bernhard CG (1966) The corneal nipple array. In: Bernhard CG (ed) The functional organization of the compound eye. Pergamon Press, London, pp 21–33
Mongodin EF, Nelson KE, Daugherty S, DeBoy RT, Wister J, Khouri JH, Weidman J, Walsh DA, Papke RT, Sanchez Perez G, Sharma AK, Nesbø CL, MacLeod D, Bapteste E, Doolittle WF, Charlebois RL, Legault B, Rodriguez-Valera F (2005) The genome of Salinibacter ruber: convergence and gene exchange among hyperhalophilic bacteria and archaea. Proc Natl Acad Sci USA 102:18147–18152
Navarro R, Santamaría J, Bescós J (1985) Accommodation-dependent model of the human eye with aspherics. J Opt Soc Am A 8:1273–1281
Nielsen C, Martinez P (2003) Patterns of gene expression: homology or homocrazy? Dev Genes Evol 2013:149–154
Nilsson DE (2013) Eye evolution and its functional basis. Vis Neurosci 30:5–20
Nilsson DE, Kelber A (2007) A functional analysis of compound eye evolution. Arthropod Struct Dev 36:373–385
Nilsson DE, Land MF, Howard J (1984) Afocal apposition optics in butterfly eyes. Nature 312:561–563
Nilsson DE, Gislen L, Coates MM, Skogh C, Garm A (2005) Advanced optics in a jellyfish eye. Nature 435:201–205
Oakley TH (2003a) The eye as a replicating and diverging, modular developmental unit. Trends Ecol Evol 18:623–627
Oakley TH (2003b) On homology of arthropod compound eyes. Integr Comp Biol 43:522–530
Onuma Y, Takahashi S, Asashima M, Kurata S, Gehring WJ (2002) Conservation of Pax-6 function and upstream activation by Notch signaling in eye development of frogs and flies. Proc Natl Acad Sci USA 99:2020–2025
Ott M (2006) Visual accommodation in vertebrates: mechanisms, physiological response, and stimuli. J Comp Physiol A 192:97–111
Peck RF, Echavarri-Erasun C, Eric A, Johnson EA, Wailap Victor Ngi WV, Kennedy SP, Hoodi L, DasSarma S, Krebs MP (2001) brp and blh are required for synthesis of the retinal cofactor of bacteriorhodopsin in Halobacterium salinarum. J Biol Chem 23:5739–5744
Piatigorsky J (2006) Seeing the light: the role of inherited developmental cascades in the origins of vertebrate lenses and their crystallins. Heredity 96:275–277
Ramirez MD, Speiser DI, Pankey S, Oakley TH (2011) Understanding the dermal light sense in the context of integrative photoreceptor cell biology. Vis Neurosci 28:265–279
Ruch S, Beyer P, Ernst H, Al-Babili S (2005) Retinal biosynthesis in Eubacteria: in vitro characterization of a novel carotenoid oxygenase from Synechocystis sp. PCC6803. Mol Microbiol 55:1015–1024
Saidel WM, Fabiane RS (1998) Optomotor response of Anableps anableps depends on the field of view. Vision Res 38:2001–2006
Salvini-Plawen LV, Mayr E (1977) On the evolution of photoreceptors and eyes. J Evol Biol 10:207–263
Sandeman DC (1978) Eye-scanning during walking in the crab Leptograpsus variegatus. J Comp Physiol 124:249–257
Schaeffel F, Mathis U (1991) Underwater vision in semi-aquatic European snakes. Naturwissenschaften 78:373–375
Seki T, Isono K, Ozaki K, Tsukahara Y, Shibata-Katsuta Y, Ito M, Irie T, Katagir M (1998) The metabolic pathway of visual pigment chromophore formation in Drosophila melanogaster. All-trans (3S)-3-hydroxyretinal is formed from all-trans retinal via (3R)-3-hydroxyretinal in the dark. Eur J Biochem 257:522–527
Snyder AW (1969) Asymptotic expressions for eigenfunctions and eigenvalues of a dielelectric or optical waveguide. IEEE Trans Microw Theory Techn MIT-17:1130–1138
Stavenga DG, Foletti S, Palasantzas G, Arikawa K (2006) Light on the moth-eye corneal nipple array of butterflies. Proc Roy Soc B 273:661–667
Strod T, Arnd Z, Izhaki I, Katzir G (2004) Cormorants keep their power: visual resolution in a pursuit-diving bird under amphibious and turbid conditions. Curr Biol 14:R376–R377
Swamynathan SK, Crawford MA, Robison WG, Kanungo J, Platigorsky J (2003) Adaptive differences in the structure and macromolecular compositions of the air and water corneas of the “four-eyed” fish (Anableps anableps). FASEB J 17:1996–2005
Terakita A (2005) The opsins. Genome Biol 6:213
Thomas AT (2005) Developmental palaeobiology of trilobite eyes and its evolutionary significance. Earth Sci Rev 71:77–93
Ullrich-Lüter EM, Dupont S, Arboleda E, Hausen H, Maria Ina Arnone MI (2011) Unique system of photoreceptors in sea urchin tube feet. Proc Natl Acad Sci USA 108:8367–8372
van Hateren JH, Nilsson DE (1987) Butterfly optics exceed the theoretical limits of conventional apposition eyes. Biol Cybern 57:159–168
Varela FG, Wiitanen W (1970) The optics of the compound eye of the honeybee. J Gen Physiol 55:336–358
Vogt K (1975) Zur Optik des Flusskrebsauges. Z Naturforsch 30:691–691
Vogt K (1977) Ray path and reflection mechanisms in crayfish eyes. Z Naturforsch 32:466–468
Vogt K (1980) Die Spiegeloptik des Flusskrebsauges. (The optical system of the crayfish eye.). J Comp Physiol A 135:1–19
von Salvini-Plawen L, Mayr E (1961). In: Hecht MK, Steere WC, Wallace B (eds), Evolutionary biology, vol. 10. Plenum Press, New York, pp 207–263
Wagner HJ, Fröhlich E, Negishi K, Collin SP (1998) The eyes of deep-sea fish II. Functional morphology of the retina. Progr Retin Eye Res 17:637–685
Warrant E, Nilsson DE (eds) (2006) Invertebrate vision. Cambridge University Press, Cambridge
Whiting MF, Bradler S, Maxwell T (2003) Loss and recovery of wings in stick insects. Nature 421:264–267
Wolken JJ, Florida RG (1969) The eye structure and the optical system in the crustacean copepod Copilia. J Cell Biol 40:279–286
Zhu XY, Park TW, Winawer J, Wallman J (2005) In a matter of minutes, the eye can know which way to grow. Invest Ophthalmol Vis Sci 46:2238–2241
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer Science+Business Media New York
About this chapter
Cite this chapter
Björn, L.O. (2015). The Diversity of Eye Optics. In: Björn, L. (eds) Photobiology. Springer, New York, NY. https://doi.org/10.1007/978-1-4939-1468-5_15
Download citation
DOI: https://doi.org/10.1007/978-1-4939-1468-5_15
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4939-1467-8
Online ISBN: 978-1-4939-1468-5
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)