
Abstract
We extend the theories of limit cycles and quasi-periodicity to the new concepts of almost and pseudo-almost limit cycles. We investigate the conditions of existence, uniqueness, and stability and introduce the notion of almost and pseudo isochrons of almost and pseudo-limit cycles. To illustrate we present several examples including some almost and pseudo-almost periodic perturbations of the harmonic oscillator and the renowned Liénard systems along with their graphic requirements. We derive the existence of almost and pseudo-almost periodic waves by perturbing first then transforming some hyperbolic and parabolic partial differential equations to Liénard-type equations. Included are some open questions on the co-existence of limit cycles and strictly almost/pseudo-almost limit cycles, the accumulation of almost/pseudo-almost limit cycles, and the bifurcation of almost/pseudo-almost limit cycles in parameterized systems, the existence of isochronous almost and pseudo-almost limit cycles. Finally through coupling and synchronization of almost or pseudo-almost self-sustained oscillators, and possibly their almost or pseudo-almost isochrons, we conjecture the transition from strictly almost/pseudo-almost periodic behavior to chaotic behavior.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keyword
- Limit cycles
- Almost and pseudo-almost periodic orbits
- Periodic waves
- Isochronous and isochrons
- Liénard systems
- Coupling
- Synchronization
Introduction
Periodicity plays an essential role in several natural and man-made systems and is apparent, for example, in simple models of the solar system, in the circadian rhythms by which basic biological functions are regulated, and in electronic devices producing stable periodic signals such as in wireless communications. Periodic trajectories, isolated or otherwise, are crucial in the mathematics of dynamical systems and its applications to science and engineering by virtue of the importance of periodic phenomena as well as by the formidable intellectual challenges in detecting and predicting periodicity.
One important aspect of periodicity is described by the so-called limit cycles, isolated periodic orbits in the phase space, stable or attractive when the neighboring solutions tend to them in an asymptotic sense or unstable if the neighboring solutions unwind from them. As such they can be seen as a set of accumulation points of either the forward or backward trajectory.
Limit cycles, when stable, actually model the dynamical state of self-sustained oscillations found very often in nature, with examples in biology, chemistry, mechanics, electronics, fluid dynamics, etc. See, for example, [3, 4, 8, 19, 21]. They often arise in many physical systems around a state at which energy generation and dissipation balance. One of the most important limit cycles of our lives is the heartbeat. A spectacular example is the Tacoma Narrows Bridge and its 1940 dramatic collapse, where the limit cycle drew its energy from the wind and involved torsional oscillations of the roadbed of about 70 ∘ . Dynamic walking in Robotics is another practical example; the stable gait to which the repeated walking pattern converges is modeled as a stable limit cycle, stability easily lost to even small disturbances, evidence of a narrow basin of attraction of the limit cycle.
Planar limit cycles were defined by Poincaré in the famous paper Mémoire sur les courbes définies par une équation différentielle [28], using his so-called Method of Sections, described in section “Overview of Limit Cycles”. However, much attention in this century has been drawn to the determination of the number, amplitude, and configuration of limit cycles in a general nonlinear system, which is still an unsolved problem. This is part of the so-called Hilbert’s 16th Problem. A weakened version by Arnold called the tangential Hilbert’s problem concerns the bound on the number of limit cycles which can bifurcate from a first-order perturbation of a Hamiltonian system
P(x, y) and Q(x, y) are polynomials of degree deg(P, Q) ≤ n, and H(x, y) is the Hamiltonian of degree \(degH(x,y) = n + 1.\) The limit cycles appearing in the perturbed system are given by the isolated zeros of the abelian integral (integral of a rational one form along an algebraic oval)
If \(I(c_{0}) = 0,\quad I^\prime(c_{0})\neq 0,\) then there is a unique hyperbolic (defined below) limit cycle bifurcating from the level set \(\gamma _{c_{0}} : H = c_{0}\) [4, 11, 15, 16]. Similar analysis was used by Toni for explicitly linearizable polynomial systems [32].
Existence/Nonexistence of Periodicity
The existence or nonexistence of periodic orbits, in particular limit cycles, is investigated in various ways. The possibility of a limit cycle on a plane or a two-dimensional manifold is restricted to nonlinear dynamical systems, due to the fact that, for linear systems, kx(t) is also a solution for any constant k if x(t) is a solution. Therefore, the phase space will contain an infinite number of closed trajectories encircling the origin, with none of them isolated. Conservative and gradient systems do not have limit cycles, though these systems may exhibit almost or pseudo-almost limit cycles [13]. We overview here the most common techniques for predicting the absence or existence of periodicity and limit cycles.
-
1.
Index Theory: The interested reader may find definitions and more details in [4, 12, 15, 21]. The index of a limit cycle is 1. If all equilibria inside the periodic orbit (isolated or not) are hyperbolic, there must be an odd number 2n + 1 of equilibria, n saddle points, and n + 1 sinks or sources. So if the appropriate equilibria are not present in a region of the phase space, a periodic orbit cannot exist. And if the sum of the indices of the equilibria enclosed in a region does not equal unity, then a closed path cannot exist in such a region. Moreover, a closed path cannot surround a region containing no equilibrium nor one containing only a saddle point. However, the relationship between equilibria and periodic orbits does not immediately generalize to higher dimensions. The system
$$\displaystyle{ \dot{x}_{1} = x_{2},\quad \dot{x}_{2} = -x_{1},\quad \dot{x}_{3} = 1 - (x_{1}^{2} + x_{ 2}^{2}) }$$(3)has no equilibria but has periodic phase paths given by the helices \(x_{1}^{2} + x_{2}^{2}\,=\,1,\) x 3 = b (b constant). See, for instance, [3].
-
2.
Dulac’s Criterion: There are no periodic orbits lying entirely in a simply connected region D where the divergence of \(B\mathcal{X}\) is not identically zero and does not change sign, with B a scalar function defined on D and \(\mathcal{X}\) the planar vector field. For instance, the system
$$\displaystyle{ \dot{x} = y,\quad \dot{y} = -x - y + {x}^{2} + {y}^{2} }$$(4)is actually a perturbation of the linear center or linear isochrone, with a continuum of periodic orbits around the origin. But it has no periodic orbits by the Dulac test using \(B = {e}^{-2x}.\) All periodic orbits were therefore destroyed by the perturbation. See, for example, [4, 7, 12, 21].
-
3.
Poincaré–Bendixson Test. If a trajectory enters and does not leave a closed and bounded region of phase space with no equilibria, then the trajectory must approach a limit cycle for increasing time. See, for example, [4, 7, 12, 16, 21].
-
4.
Bifurcation theory. A bifurcation, qualitative change in the behavior of the system as the system parameter is varied, could involve a change of stability of the periodic orbit and/or the creation/destruction of periodic orbits. See the above example of Hamiltonian system. For example, it is known that at most k, limit cycles (of small amplitude) bifurcate out of a weak focus of order k under a perturbation of the coefficients [4].
More importantly, Melnikov’s theory is a powerful tool for predicting the number, positions, and multiplicities of limit cycles that bifurcate from homoclinic and heteroclinic orbits under perturbations, by associating to a given dynamical system a function whose roots are related to the existence and location of limit cycles. It has been developed for the analysis of planar systems
$$\displaystyle{ \dot{u}(t) = f(u) +\epsilon g(u), }$$(5)for u ∈ R 2, ε ≪ 1 and f, and g sufficiently smooth functions, assuming that the unperturbed system at ε = 0 has a one-parameter family of τ r -periodic solutions γ r . Then the Melnikov function is given by
$$\displaystyle{ \mathcal{M}(r) =\int _{ 0}^{\tau _{r} }{e}^{\int _{0}^{t}\nabla f(\gamma _{ r}(s))ds}f \wedge g(\gamma _{r}(t))dt, }$$(6)where the wedge product of \(u = (u_{1},u_{2})\) and \(v = (v_{1},v_{2})\) in R 2 is \(u \wedge v = u_{1}v_{2} - u_{2}v_{1}.\) Therefore, if there exist r j j = 1, …, n such that \(\mathcal{M}(r_{j}) = 0,\) with \(\mathcal{M}^\prime(r_{j})\neq 0,\) then the system has n hyperbolic limit cycles in an O(ε) neighborhood of \(\gamma _{r_{j}}\) that bifurcate from the periodic orbits \(\gamma _{r_{j}}(t).\) And if \(\mathcal{M}(r_{0})\neq 0,\) then the system has no limit cycles in an O(ε) neighborhood of \(\gamma _{r_{0}}.\) See, for instance, [11, 15, 16, 32].
-
5.
Configuration of limit cycles. Any configuration C of closed curves, that is, any finite set of mutually disjoint closed curves, is realizable as a configuration of limit cycles by a polynomial vector field of degree n, as well as a configuration of algebraic limit cycles by a polynomial vector field of degree \(\leq 2(n + r) - 1\) where r is the number of its primary curves (containing no other curves). By realizable we mean topologically equivalent with the existence of a homeomorphism between the set of closed curves and the set of limit cycles. An algebraic closed curve is a connected component of the zero set of some polynomial function. See for instance [11, 15].
-
6.
The Toroidal Principle. If a smooth vector field \(\mathcal{X}\) leaves a toroidal region (a submanifold M in R n diffeomorphic to \({\mathbf{D}}^{n-1} \times {S}^{1}\)) positively invariant and has a section S diffeomorphic to the closed unit disk D n − 1, then \(\mathcal{X}\) has a periodic orbit in M by Brouwer’s fixed point theorem. (D n is the closed unit disk in R n.) See [8].
Remarks
The nonlinear character of isolated periodic oscillations renders their detection and construction challenging. In mechanical terms the appraisal of the regions of the phase plane where energy loss and energy gain occur might reveal a limit cycle, for example, in the family of equations of the form
with a small nonlinearity for ε ≪ 1. In particular we have the well-known case of \(h(x,\dot{x}) = ({x}^{2} - 1)\dot{x}\) for the Van del Pol equation. In the absence of a forcing term, it has a single, self-excited oscillation approached from all nonzero initial conditions, that is, a stable limit cycle [18, 19, 21].
Let us emphasize that even though in most studies periodicity has been illustrated more frequently, the occurrence of almost and pseudo-almost periodic oscillations or waves is actually much more common than that of periodic ones. For instance, in the simplest model of harmonic oscillator or mathematical pendulum, as well as for the one-dimensional wave equation, diverse kinds of oscillatory trajectories can be displayed, both periodic and more generally nonperiodic.
The theory of almost periodic functions introduced by H. Bohr [6] is connected with problems in differential equations, stability theory, dynamical systems, partial differential equations, or equations in Banach spaces. There are several results concerning the existence and uniqueness of almost periodic solutions for first-order differential equations, for example, in [13, 14, 16, 25, 26, 29]. But in most of these works the authors derived almost periodic solutions from the existence of bounded solutions.
We extend the theory of limit cycles to that of almost and pseudo-almost limit cycles, isolated almost/pseudo-almost periodic orbits, and we discuss in the current and future work the usual questions of conditions of existence and uniqueness, stability and asymptotic stability, bifurcation and perturbation, the coexistence of limit cycles and almost/pseudo-almost limit cycles, and introduce the idea of almost isochrons and pseudo-almost isochrons. Section “Overview of Limit Cycles” overviews the theory of limit cycles with some examples and presents the concept of isochrons. Section “Almost Limit Cycles” is devoted to almost limit cycles and includes definition, properties, examples, and the main existence theorem for Liénard systems. In Section “Pseudo-Almost Limit Cycles”, we present the concept of pseudo-almost limit cycle, its properties, several illustrative examples including the so-called linear pseudo-center, and existence theorem in the case of Liénard systems. The section shows the applications of the existence theorems for Liénard systems to obtain almost and pseudo-almost periodic waves for some hyperbolic and parabolic partial differential equations. Finally in Section “Almost and Pseudo-Almost Periodic Waves” we discuss some directions for future research, and state several open problems, defining in the process the concept of almost isochrons and pseudo-almost isochrons. One important question is the requirements for transition from almost or pseudo-almost periodic behavior to a chaotic behavior.
Overview of Limit Cycles
Let the multidimensional space R n represents all the possible states of a system modeling nonlinear phenomena. The dynamics of the system are determined by the values in R n in terms of the time. That is to say we define an evolution map or flow Φ, smooth on the smooth manifold R n :
such that Φ(x, t) = y indicates that the state x ∈ R n evolved into the state y ∈ R n after t units of time, together with the usual flow properties
The flow Φ then determines a vector field \(\mathcal{X}\) (conversely as well) such that, for x ∈ M
The orbit or trajectory of the flow through x ∈ R n is given by
Definition 1.
The orbit γ = O(x) based at x is called a limit cycle if there is a neighborhood V of γ such that γ is the only periodic orbit contained in V. The limit cycle is stable (unstable) if ω(s) = γ (α(s) = γ) for any s ∈ V that is, γ is the ω-limit set (α-limit set) of any point in V.
In other words, a limit cycle is an isolated periodic orbit of some period τ, that is stable (resp. unstable) if it has a neighborhood U such that, for some distance function d on R n, d(Φ(y, t), γ)→0, as t → ∞ (resp. t → − ∞), for any y ∈ U.
Note that the phase \(\varphi\) of a limit cycle refers to the relative position on the orbit, which is measured by the elapsed time (modulo the period) to go from a reference point to the current position on the limit cycle.
Examples: Linear Center and Its Perturbations
Example 1
The linear center or linear isochrone
where the origin of the plane is surrounded by a continuum of periodic orbits (not isolated) given by \({x}^{2} + {y}^{2} = c > 0,\) is perturbed into the following system, in polar coordinates (r, θ)
The circle r = 1 is a 2π-periodic orbit and is unique. It is therefore a limit cycle. Moreover r is a monotone function on each orbit (\(\dot{r} > 0\) inside and < 0 outside) so that all nonconstant orbits tend towards the limit cycle which is therefore stable. This system is the so-called Poincaré Oscillator as in the figure below (Fig. 12.1).

\(\dot{r} = r(1 - r),\quad \dot{\theta } = 1\)
Example 2
The linear center could also be perturbed into a system to generate several limit cycles as in the following example. The C ∞-system
where
has an infinite number of limit cycles
accumulating at the origin. The phase portrait appears below in Fig. 12.2.

\(\dot{x} = -y + xf(x,y),\quad \dot{y} = x + yf(x,y)\ \text{where}\ f(x,y) =\sin ( \frac{1} {{x}^{2}+{y}^{2}} ){e}^{- \frac{1} {{x}^{2}+{y}^{2}} }\)
Poincaré’s Method of Sections
Poincaré first observed that if a τ-periodic orbit γ exists for a smooth vector field \(\mathcal{X},\) and if x 0 ∈ γ, and \(\mathcal{H}\) is a hyperplane complementary to the tangent line \(T_{x_{0}}(\gamma )\) to x 0 at γ, then there is a sufficiently small neighborhood, called a local section or cross section, \(\Sigma \subset \mathcal{H}\) on which the implicit function theorem provides for each x ∈ Σ a least positive time t x for the solution based at x to first return to Σ, defining the so-called smooth Poincaré or “first return” map (monodromy operator) \(\mathcal{P}\) on Σ. In other words, we have
-
1.
x 0 ∈ Σ, and \(\bar{\Sigma }\cap \gamma =\{ x_{0}\}.\) (\(\bar{\Sigma }\) denotes the closure of Σ.)
-
2.
\(T_{x_{0}}\Sigma + T_{x_{0}}\gamma = T_{x_{0}}\mathcal{H}.\) (Σ is transverse to γ at x 0.)
By continuity of the flow, and the implicit function theorem, the time τ x of first return exists and is near the period τ for a point x near x 0. Therefore, in practice, \(\mathcal{P}(y) = \Phi _{\tau _{x}}(x),\) where τ x is the time taken by the orbit Φ x (t) to first return to Σ. And τ x → τ as x → x 0. Of course, \(\mathcal{P}(x_{0}) = x_{0},\) that is, x 0 is a fixed point for the map \(\mathcal{P}.\) And the existence of fixed points for \(\mathcal{P}\) implies the existence of periodic orbits for the flow, allowing for the use of powerful topological fixed point theorems. But the existence of such a section is itself one of the standard paradigms of the existence of nonlinear oscillations (Fig. 12.3). Next consider the monodromy operator given by the matrix \(D_{x_{0}}\mathcal{P} = [\frac{\partial \mathcal{P}} {\partial x} (x_{0})]\) of partial derivatives of \(\mathcal{P}\) at x 0. The limit cycle is said to be hyperbolic or elementary if \(D_{x_{0}}\mathcal{P}\) has no eigenvalue of modulus one. The eigenvalues are the so-called characteristic (Floquet) multipliers of γ and are independent of the choice of x 0 and Σ. A hyperbolic limit cycle is stable (resp. unstable) if it has all the multipliers with modulus less than one (resp. greater than one). Each orbit in the neighborhood of γ tends toward (resp. away from) γ exponentially fast. For a planar vector field \(\mathcal{X}(x,y) = P(x,y)\partial x + Q(x,y)\partial y,\) with P and Q at least C 1, sufficient conditions for stability are given by the following: for τ the period of the limit cycle γ, \(I(\tau ) =\int _{ 0}^{\tau }(\frac{\partial P(x,y)} {\partial x} + \frac{\partial Q(x,y)} {\partial y} )dt\) is negative for stable limit cycle and positive for unstable limit cycle; such limit cycles are said to be hyperbolic. A multiple limit cycle is obtained for I(τ) = 0 [11, 15, 28].

Poincaré section
The idea of a constant first return time identical to the period of the limit cycle leads to the description of isochrons which we introduce next.
Isochrons
Winfree in [33, 34] introduced the isochrons of limit cycles in biosciences, in particular in relation to biological rhythms. Then Guckenheimer showed that they are in fact the stable manifolds of a point on an attractive hyperbolic limit cycles. Their existence for nonhyperbolic limit cycles was proved by Chicone in [10].
Definition 2.
For a hyperbolic stable limit cycle γ of period τ and for x 0 ∈ γ, the isochron at x 0 , denoted by Is(x 0 ), is defined as a cross section of γ at x 0 for which the time of first return is identically the period τ.
In other words, the isochrons of a limit cycle is the set of points from which state trajectories evolve to the same phase as the limit cycle. That is, a set of initial conditions resulting in oscillations having the same phase. The limit cycle itself, like the unit circle, can be parameterized by one variable called its phase \(\varphi .\)
The existence of isochrons is ensured by the Invariant Manifold Theorem as the leaves of the invariant foliation of the stable manifold of a hyperbolic periodic orbit. In a 2-state system the foliation is visualized as lines traversing the limit cycle. They are used extensively in investigating the dynamics of neural oscillators and to qualitatively illustrate phase resetting in circadian rhythms.
In practice, for a hyperbolic limit cycle γ, there exists a unique \(\vartheta (x)\) for any x∉γ such that
where Φ(t) is the trajectory based at x. The value \(\vartheta (x),\) bounded by the period T (1 or 2π after normalization), is called the asymptotic (or latent) phase of x.
A level set \(\vartheta (x) = c\) or \({\vartheta }^{-1}(c)\) defines an isochron. And it is an (n − 1)-dimensional hyperplane. In fact all points of an isochron are points of the sequence \(\{x(kT)\}_{k\geq 0}.\) That is, points on the forward orbit Φ(t) observed only at times integer multiple of the period of the limit cycle, thereby defined by a Poincaré map. Therefore, an isochron is a special Poincaré section with the time of first return equals the period of the limit cycle. A phaseless set is formed by those points where isochrons cannot be defined. See, for example, [3, 19, 33, 34].
Example
Consider the planar differential equations in polar coordinates (r, θ)
with a limit cycle γ : r = 1. Looking for a function f such that the asymptotic phase is defined by \(\vartheta (r,\theta ) =\theta -f(r)\) leads to each isochron \({\vartheta }^{-1}(c)\) being defined by \(\theta = c + \frac{1} {r} - 1.\) Therefore, isochrons exist everywhere in the plane, with the phaseless set reduced to the singleton containing the origin, whose every neighborhood intersects all isochrons. Consequently, using the asymptotic phase as the new phase coordinate allows the dynamics of the phase to be decoupled from the other coordinate, thereby effectively reducing the dimension of the equation in the neighborhood of the limit cycle.
Remarks
Note that the concept of isochrons extends the notion of phase of a periodic orbit to a neighborhood of that orbit. The phase difference between two points in the basin of attraction of a limit cycle can be directly computed as the time difference between the isochrons to which they belong. Computation of isochrons is usually quite difficult, requiring sometimes the coordinate transformation to phase variables, or backward integration of the system from the limit cycle, and collection of points at time interval of the period. The configuration of the isochrons in a given region also determines how fast or slow trajectories are moving in that region. The convergence (resp. divergence) of isochrons indicates a slow (resp. fast) synchronization region. A numerical resolution of isochrons could be found in [3].
Almost Limit Cycles
Definition 3.
The orbit O(x 0) based at x 0 as defined above is called an almost limit cycle if it is isolated and the function \(\Phi (.) := \Phi _{x_{0}}(.) : \quad \mathbf{R}\rightarrow {\mathbf{R}}^{n}\) is almost periodic in the following sense (Bohr): ∀ε > 0, ∃l ε > 0 such that every interval (a, a + l ε ) in R of length l ε contains a number τ ε such that
The number τ ε is called the ε-almost period of \(\Phi _{x_{0}}(.),\) or ε-translation number. The following properties are derived from those of almost periodic functions which could be found for instance in [6, 13, 16]. Denote AP(R, R n) the Banach space of almost periodic functions from R to R n.
Properties of Almost Limit Cycles
-
1.
The set \(\mathcal{T}_{\epsilon }\) of the ε-translation numbers is relatively dense in R.
-
2.
The orbit O(x 0) is bounded, relatively compact in R n, and the map \(\Phi _{x_{0}}(.)\) is uniformly continuous. Moreover there is a sequence of trigonometric polynomials \(P_{n}(t) = \Sigma _{k=1}^{N}a_{k}{e}^{i\lambda _{k}t}\) converging to Φ(t) uniformly in R.
-
3.
The family of translates \(\mathcal{F} :=\{ T_{\tau }\Phi (.) = \Phi (.+\tau );\quad \tau \in \mathbf{R}\}\) is relatively compact in the space of almost periodic functions from R to R n.
-
4.
For a sequence of almost periodic solutions Φ k (t), k = 1, …, n and ∀ε > 0, there exist common ε-translation numbers.
-
5.
For Φ ∈ AP(R, R n) the time mean or mean value of Φ(t) exists and is defined by
$$\displaystyle{ M(\Phi ) :=\lim _{T\rightarrow \infty } \frac{1} {2T}\int _{-T}^{T}f(t)dt. }$$(19) -
6.
The Fourier exponent λ and the related Fourier-Bohr coefficient c(λ) of Φ ∈ AP(R, R n) are defined by \(c(\lambda ) = M(\Phi (t){e}^{-i\lambda t})\neq 0.\) The module mod(Φ) of Φ is the additive group generated by the set \(\Lambda (\Phi ) =\{\lambda \in \mathbf{R}\vert c(\Phi )\neq 0\}.\) The almost periodic function is said to be quasi-periodic with frequency \(\omega = (\omega _{1},\cdots \,,\omega _{m}) \in {\mathbf{R}}^{m}\) if its module is contained in the additive group generated by ω.
-
7.
Any Φ ∈ AP(R, R n) satisfies the so-called recurrence property, that is, there exists a real sequence {τ n } with lim n→ ± ∞ τ n = ± ∞ such that \(\lim _{n\rightarrow \infty }\vert \vert T_{\tau _{n}}\Phi - \Phi \vert \vert = 0.\)
Example of Linear Almost Center
Let p(t) ∈ AP(R, C), and consider the differential equation
Define a kernel
Therefore, K ∈ L 1(R, C). Thus, the convolution \(x_{\alpha }(t)=(K{\ast}p)(t)={e}^{-\alpha t}\!\!\int _{-\infty }^{t}{e}^{\alpha s}\!p(s)ds\) is also in AP(R, C). Moreover this convolution is an almost periodic solution, not isolated; therefore it is not an almost limit cycle. Indeed the equation being linear, we derive a continuum of parameterized family of almost periodic solutions. Such a continuum is called a linear almost center. This example also appears in [13]. We represent below the solution for the almost periodic function \(p(t) =\sin t +\sin \sqrt{2}t\) (Fig. 12.4).

\(\dot{x}(t) =\alpha x(t) + (\sin t +\sin \sqrt{2t}),\quad \alpha = 1,2,3,4\)
We introduce here an efficient technique of investigating almost periodic solutions and consequently almost limit cycles.
Hull and Method of Auxiliary Systems
Consider the nonlinear system
where the function f is continuous on the open set \(O = \mathbf{R} \times I,\quad I \subset {\mathbf{R}}^{n},\) and almost periodic in t uniformly with respect to x ∈ K ⊂ I, for K a compact subset of I.
Therefore, f(R, K) is bounded. And the function f(t, . ) is uniformly continuous on K. A function g is said to be in the hull H(f) of f if there exists a sequence {τ n ; n ≥ 1} in R with \(\lim _{n\rightarrow \infty }f(t +\tau _{n},x) = g(t,x)\) uniformly on any set R ×K, K ⊂ I. That is, g is in the closure of the set \(\{f(t+\tau ,x),\quad \tau \in \mathbf{R}\}.\)
Then consider the auxiliary system
Let D be a region of R × R n given by D = R ×K, K the above compact set. A solution x(t) of the system ( S ) whose graph is in D is separated in D if it is either the only solution with its graph in D or there is a number δ > 0 such that | x(t) − y(t) | ≥ δ, t ∈ R, where y(t) is another solution with its graph in D. From Amerio [2, 13] we obtain the following two theorems:
Theorem 1.
Consider the systems (S) and (Sa ) :
-
1.
The number of separated solutions with the graph in D is finite.
-
2.
If the system (S) has a solution with graph in D, then each of the auxiliary system has also a solution with its graph in D.
-
3.
If x(t), t ≥ t 0 , is a solution of the system (S) such that x(t) ∈ K for t ≥ t 0 , then the auxiliary system (Sa ) has a solution defined on R whose graph is in D.
Consequently it results:
Theorem 2.
Assuming the auxiliary system has its solutions in D separated, then all these solutions are almost periodic.
Therefore, we are allowed to conclude that bounded separated solutions of system ( S ) are almost periodic. Corduneanu in [13] has effectively used this method to prove the existence of an asymptotically stable almost periodic solution to a Liénard-type second-order differential equation.
Next we illustrate the concept of almost limit cycle with several examples.
Almost Periodic Perturbations of the Harmonic Oscillator
Consider the forced oscillations of the harmonic oscillator given by
or equivalently for \(\dot{x} = y\)
where the external forcing term is f(t) = ksinω 1 t with ω 1 such that the ratio \(\frac{\omega _{1}} {\omega _{0}}\) is irrational. From the Lagrange’s method the general solution is computed as
This solution certainly represents an oscillatory motion, but due to the fact that the ratio is irrational, the solution x(t) is not periodic in t but is indeed one of the simplest examples of an almost periodic trajectory in an explicit form. The periodic perturbation has indeed destroyed the free harmonic oscillations. Setting the parameters A, α, ω 0 k, and ω 1 to numerical values provides an example of a unique asymptotically almost periodic orbit, thus isolated. It is therefore a unique stable almost limit cycle.
We further illustrate the theory of almost and pseudo-almost limit cycles with the well-known Liénard systems.
Liénard Systems
Why the Liénard Systems?
Liénard equation, which also generalizes the famous Van der Pol oscillator, is ubiquitous in the study of nonlinear systems [1, 2, 7, 12, 22, 23]. We here recall some by now classical results about Liénard-type systems.
Consider the one-parameter family of forced Liénard systems
or equivalently
where f, g, and h are continuous functions on R, μ a small real parameter, and \(F(x) :=\int _{ 0}^{x}f(s)ds.\)
Setting the parameter μ = 0, that is, for homogeneous Liénard systems, we obtain the following well-known Liénard theorems. See more details in, for example, [7, 9, 12].
Theorem 3.
Consider the system
where f(x) and g(x) are two functions generally nonlinear, assumed continuous, and differentiable from R to R, together with the following conditions:
-
(L 1 ) : xg(x) > 0, for x≠0.
-
(L 2 ) : lim |x|→∞ |F(x)| = ∞.
-
(L 3 ) : There exist real numbers α and β such that F(x) < 0, for x < −α or 0 < x < β, and F(x) > 0, for −α < x < 0 or x > β.
-
(L 4 ) : f(x) is symmetric, while g(x) is antisymmetric.
Then there exists a unique nontrivial periodic solution to the equation.
Theorem 4.
If the Liénard’s equations satisfies the following conditions:
-
1.
f(x) is continuous, even and f(0) < 0.
-
2.
g(x) is locally Lipschitz, odd, and such that xg(x) > 0 for x≠0.
-
3.
f(x) has a unique positive zero at x = b, and it increases at ∞ for x > b.
Then there a unique stable limit cycle.
Therefore, these theorems provide conditions under which there exist, for the unperturbed Liénard systems, respectively, a unique periodic solution and a unique limit cycle, isolated periodic orbit controlling the behavior of neighboring trajectories. We next subject some classes of Liénard systems to perturbations that, in fact, destroy the limit cycles to give birth to almost limit cycles or pseudo-almost limit cycles under suitable conditions.
Liénard Almost Limit Cycles
We study system (21) or its equivalent form (23) under the following additional assumptions:
-
(A 1) f(x) > 0, in R, with F(x)sgnx → ∞ as | x | → ∞.
-
(A 2) xg(x) > 0 for x≠0, G(x) → ∞ as | x | → ∞.
-
(A 3) | h(t) | ≤ K, and | H(t) | ≤ K, with \(H(t) =\int _{ 0}^{t}h(s)ds,\) t ∈ R, and K a positive constant.
-
(A 4) g′(x) > 0, and g″(x) exists and is bounded.
It is known that, under such assumptions, for 0 < μ ≪ 1, there exists in the xy-plane a set E bounded by a regular simple curve (C 1 except possibly at a finite number of points) such that:
-
1.
For every solution γ(t) = (x(t), y(t)) of system (21), there is a value t 0 such that γ(t 0) ∈ E.
-
2.
If, for a value t 0 of t, we have γ(t 0) ∈ E, then we have also γ(t) ∈ E, for t ≥ t 0. That is, solutions entering the set cannot leave it for increasing time.
Moreover the set E depends only on the functions f(x), g(x), h(t), the parameter μ, and the constant K. Equivalently, the set E may be described by the inequalities \(\vert x(t)\vert \leq x_{0}\quad \vert \dot{x}(t)\vert \leq v_{0},\) for a solution x(t) of Eq. (20), and where x 0 and v 0 are constants independent of μ. See, for example, [9, 26, 29]. In other words, under the above conditions the solutions ultimately settle in a C 1-bounded set E in R 2.
The main theorem here states:
Theorem 5.
Assume the function h(t) is an almost periodic function, then under the conditions (A 1 ),…,(A 4 ), the almost periodically forced Liénard system has a unique stable almost limit cycle.
This theorem was first presented by the Toni in [31]. We present here an improved and self-contained proof for the sake of clarity.
Proof.
Let γ(t) = (x(t), y(t)) a solution of the system, and \(\tilde{\gamma }(t) = (\tilde{x}(t),\tilde{y}(t))\) either another solution of the system or a solution of an associated system with a sufficiently small perturbation \(\bar{h}(t)\) of the forcing term h(t). We have then
that is,
Indeed, upon the change of variables \(u(t) =\tilde{ x}(t) - x(t),\quad v(t) =\tilde{ x}(t) - y(t),\) we obtain the system
where
Note that the functions f, g′, and g″ are bounded on the compact set E. For sufficiently small values of the parameter μ ≪ 1, we can construct the quadratic form
with c > 0 chosen small enough for Q(t, u, v) to be positive definite such that
c a positive constant, and such that
Actually we have
yielding
The quadratic form \(\tilde{Q}(t,u,v)\) can be made negative definite by taking the constant c such that
which entails
Therefore, Q(t) → 0 as t → ∞, implying that u → 0 and v → 0. The constant c is appropriately chosen so that, when \(\vert \Delta h(t)\vert = \vert \tilde{h}(t) - h(t)\vert \rightarrow 0,\) we can make Q(t) → 0 for t → ∞. That is, the solutions of the system of the perturbed forcing term ultimately converge to the solutions of the original system.
Next let γ(t) = (x(t), y(t)) be one of these solutions which settled in E for t ≥ t 0. We then define the sequence of solutions \(\gamma _{n}(t) =\gamma (t + n) = (x_{n}(t),y_{n}(t)),\quad t \geq t_{0} - n.\) The sequence is therefore equicontinuous and uniformly bounded. Consequently we can extract a subsequence \(\gamma _{n_{k}}(t)\) converging uniformly to a solution \(\bar{\gamma }(t) = (\bar{x}(t),\bar{y}(t))\) lying completely in E for all t ∈ R. \((\lim _{n\rightarrow \infty }(t_{0} + n,\infty ) = (-\infty ,\infty )).\) And of course \(\bar{\gamma }(t)\) is unique. Therefore, the forced Liénard system has a unique solution \(\bar{\gamma }(t) = (x(t),y(t))\) defined on the whole real line R in the set E.
Now h(t) almost periodic implies there is an ε-almost period τ such that
for any arbitrary ε. For such an ε-period consider the function \(\bar{\gamma }(t+\tau )=(\bar{x}(t+\tau ),\) \(\bar{y}(t+\tau )).\) It is readily a solution of the following system \((\mathcal{E}_{\tau })\):
Take h(t + τ) as a sufficiently small perturbation of h(t) as above. Therefore, we obtain
which entails that the unique solution γ(t) is also almost periodic with the same ε-almost period as the forcing term h(t).
Moreover all other solutions of the system that ultimately settle in E converge to the unique almost periodic solution γ(t) ∈ E. Therefore, the system has a unique (isolated) almost periodic solution to which any other solution unwinds in the C 1-bounded set E. It is a stable almost limit cycle as defined above. Hence the claim. □
Remarks
Note that the proof of the theorem actually accomplishes more. That is, under the assumptions above, only one solution of the system settles in the bounded region E for all time; that solution will be of the same nature as the forcing term, almost periodic for an almost periodic forcing in this case. It has been proven also, for example, in [9, 26, 29], that it is periodic under a periodic forcing. In addition, we prove in the next section that this single solution becomes as well pseudo-almost periodic under such a forcing term. Indeed the next section discusses the concept of pseudo-almost limit cycles from the dual concepts of limit cycles and pseudo-almost periodicity.
Pseudo-Almost Limit Cycles
Introductory Concepts
Let \(\mathcal{C}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n}),\quad \Omega \subset {\mathbf{R}}^{n}\) open, be the Banach space of bounded continuous functions ϕ(t, x) endowed with the norm | | ϕ | | = sup t ∈ R, x ∈ Ω | ϕ(t, x) | . The set \(\mathcal{C}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n})\) is a subset of the more general space \(\mathbf{L}_{b}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n})\) of all Lebesgue measurable and bounded functions.
Definition 4.
A function f in \(\mathcal{L}_{b}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n})\) is said to be ergodic if for every compact subset K ⊂ Ω, the mean defined by
exists uniformly for x ∈ K.
We say that the function has a vanishing mean if \(\mathcal{M}(f) = 0.\) Let \(\mathcal{E}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n})\) denote the space of all ergodic functions on R ×Ω. Note in passing that not all uniformly continuous bounded functions on R are ergodic. For instance the function
is uniformly continuous in R, but not ergodic (Fig. 12.5). In the space \(\mathcal{L}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n})\) of all Lebesgue measurable functions on R ×Ω, we consider next the following subspace \(\mathcal{L}_{0}\) of all \(\{\phi \in \mathcal{L} : \mathbf{R} \times \Omega \rightarrow {\mathbf{R}}^{n}\) such that ∀x ∈ Ω, \(\tilde{\phi }(.) :=\phi (.,x)\) is Lebesgue measurable on R with \(\mathcal{M}(\vert \tilde{\phi }\vert ) = 0,\) and \(\mathcal{M}(\vert \phi \vert ) = 0.\)

\(f(t) = 1 - {t}^{2},\quad \mathrm{for}\quad \vert t\vert < 1,\,\,\text{and}\quad \sin (\mathit{log}( \frac{1} {{t}^{2}} )),\quad \mathrm{for}\quad \vert t\vert \geq 1\)
For example, the function
is unbounded, Lebesgue measurable with vanishing mean \(\mathcal{M}.\)
The unbounded and discontinuous function
is also an element of \(\mathcal{L}_{0}.\) Indeed we have \(\lim _{T\rightarrow \infty } \frac{1} {2T}\int _{-T}^{T}\vert \phi (t)\vert dt =\lim _{ n\rightarrow \infty }\frac{1} {n}\sum _{k=1}^{n}\) \(\frac{1} {\sqrt{k}} = 0.\)
Definition 5.
The orbit O(x 0) based at x 0 as defined above is called a pseudo-almost limit cycle if it is isolated, and more importantly if the function \(\Phi (.) := \Phi _{x_{0}}(.) : \quad \mathbf{R}\rightarrow {\mathbf{R}}^{n}\) defining the orbit is pseudo-almost periodic in the following sense, ∀ε > 0, ∃δ = δε > 0, a relatively dense subset \(\mathcal{D}_{\epsilon }\subset \mathbf{R},\) a subset \(C_{\epsilon } \subset \mathbf{R},\) such that:
-
1.
For m the Lebesgue measure on R,
$$\displaystyle{ \lim _{t\rightarrow \infty }\frac{m(C_{\epsilon } \cap [-t,t])} {2t} = 0,\quad (C_{\epsilon }\;{is called an ergodic zero set}). }$$(42) -
2.
Let T τ Φ denotes the translate of Φ by τ, that is, \((T_{\tau }\Phi (t)) := \Phi (t+\tau ).\) Then
$$\displaystyle{ \vert \vert (T_{\tau }\Phi )(t) - \Phi (t)\vert \vert <\epsilon ,\quad \tau \in \mathcal{D}_{\epsilon },\quad t,t+\tau \in \mathbf{R} - C_{\epsilon }. }$$(43) -
3.
Finally
$$\displaystyle{ \vert t_{1} - t_{2}\vert <\delta \Longrightarrow\vert \vert \Phi (t_{1}) - \Phi (t_{2})\vert \vert <\epsilon ,\quad t_{1},t_{2} \in \mathbf{R} - C_{\epsilon }. }$$(44)
Denote \(\mathcal{P}\mathcal{A}\) the space of pseudo-almost periodic functions. These functions satisfy the following properties widely available in the relevant literature [13, 14, 35].
Some Properties of Pseudo-Almost Periodicity
We first give an equivalent definition of a pseudo-almost periodic function, in particular in the space \(\mathcal{C}(\mathbf{R} \times \Omega ,{\mathbf{R}}^{n}),\) with the restriction of \(\mathcal{L}_{0}\) to the space \(\mathcal{E}_{0}\) containing all functions \(\phi \in \mathcal{C}(\mathbf{R} \times \Omega )\) such that
uniformly in x ∈ Ω.
Definition 6.
A function \(f : \mathbf{R} \times \Omega \rightarrow {\mathbf{R}}^{n}\) is called pseudo-almost periodic in t uniformly on compact subsets K of Ω if it has a unique decomposition in the form
where a is almost periodic and \(e \in \mathcal{E}\subset \mathcal{L}_{0}.\) Recall that a is almost periodic if it satisfies the so-called Bohr’s property. That is, ∀ε > 0 ∃l = l(ε) such that any interval (t, t + l) ⊂ R contains a number τ such that
The functions a and e are called, respectively, the almost periodic component and the ergodic perturbation of f. Moreover we have the following properties [14, 35]:
-
1.
For \(f \in \mathcal{P}\mathcal{A}\), the set f(R, K) : = { f(t, x) | t ∈ R, x ∈ K} is bounded for every bounded subset K ⊂ Ω.
-
2.
The function f(t, . ) is uniformly continuous in each bounded subset of Ω uniformly in t.
-
3.
When the ergodic zero set C ε = ∅, the space \(\mathcal{P}\mathcal{A}\) coincides with the space \(\mathcal{A}\mathcal{P}\) of almost periodic functions.
-
4.
If both functions f and its derivative f′ are pseudo-almost periodic, with \(f = a + e\) and \(f^\prime = a^\prime + e^\prime,\) where a and a′ in \(\mathcal{P}\mathcal{A}\) and e and e′ in \(\mathcal{L}_{0},\) then the functions a and e are differentiable with a′ = a and e′ = e.
Some Illustrative Examples of Pseudo-Almost Periodic Functions
We present some by now classic examples of pseudo-almost periodic functions. See also [14, 35]. We include here their graphic requirements.
Example 1
We consider the function
and represent, respectively,
-
1.
The almost periodic component \(a(t) =\sin t +\sin \sqrt{2}t\) and the ergodic perturbation \(e(t) = \frac{{e}^{-\vert t\vert }} {1+{t}^{2}}\) (Fig. 12.6)
-
2.
The pseudo-almost periodic function \(\phi _{1}(t) = a(t) + e(t)\) (Fig. 12.7)

\(a(t) =\sin t +\sin \sqrt{2t},\ \text{and}\ e(t) = \frac{{e}^{-\vert t\vert }} {1+{t}^{2}}\)

\(\phi _{1}(t) = a(t) + e(t) =\sin t +\sin \sqrt{2t} + \frac{{e}^{-\vert t\vert }} {1+{t}^{2}}\)
Example 2
We consider the function
with the graphic representations given below:
-
1.
The almost periodic component a(t) = sint + sinπt and the ergodic perturbation\(e(t)=t|\sin\pi t|^{t^N}\) for N = 8 (Fig. 12.8)
-
2.
The pseudo-almost periodic function \(\phi _{2}(t) = a(t) + e(t)\) (Fig. 12.9)

\(a(t) =\sin t +\sin \pi t\ \text{and}\ e(t) = t\vert \sin \pi t{\vert }^{t8}\)

\(\phi _{2}(t) = a(t) + e(t) =\sin t +\sin \sqrt{2t} + \frac{{e}^{-\vert t\vert }} {1+{t}^{2}}\)
Example 3
We finally consider the function
where
and
We take h(t) = t 2, in L 1(R), ω = 1, and represent in figure below:
-
1.
The almost periodic component I 1(t) and the ergodic perturbation I 2(t) (Fig. 12.10)
-
2.
The pseudo-almost periodic function \(\phi _{1}(t) = I_{1}(t) + I_{2}(t)\) (Fig. 12.11)

\(I_{1}(t) =\int _{ -\infty }^{\infty }h(t - s)(\sin \,s +\sin \sqrt{2s})\mathit{ds}\ \text{and}\ I_{2}(t) =\int _{ -\infty }^{\infty }\frac{h(t-s)} {{s}^{2}{+\omega }^{2}} \mathit{ds}\)

\(\phi _{\omega }(t) = I_{1}(t) + I_{2}(t)\)
As in the previous section we now present some examples of existence of pseudo-almost limit cycles. First we mention the case of the linear pseudo-almost center.
Linear Pseudo-Almost Center: An Example
Let \(p(t) \in \mathcal{P}\mathcal{A}(\mathbf{R},\mathbf{C}),\) that is, a complex-value pseudo-almost periodic function defined on the real numbers, and consider the differential equation (see also [13])
Define a kernel
Therefore, \(K \in {L}^{1}(\mathbf{R},\mathbf{C}).\) Thus, the convolution \(x_{\alpha } = (K {\ast} p)(t)={e}^{-\alpha t}\int _{-\infty }^{t}{e}^{\alpha s}p(s)ds\) is also in \(\mathcal{P}\mathcal{A}(\mathbf{R},\mathbf{C}),\) for every α. Indeed the space \(\mathcal{P}\mathcal{A}\) is convolution invariant by L 1. The equation being linear, it results in the existence of a continuum of parameterized pseudo-almost periodic solutions which we called linear pseudo-almost center. Therefore, these solutions are not isolated and are not pseudo-almost limit cycles.
Pseudo-Almost Periodic Perturbations of the Harmonic Oscillator
Consider the forced oscillations of the harmonic oscillator given by
where the forcing term is
equivalently, for \(\dot{x} = y\)
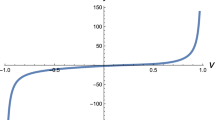
Clearly the function explicitly given by
is the unique solution of the equation, and it is one of the classic examples of pseudo-almost periodic function that is not periodic. (See also [11].) Therefore, we obtain an explicit and simple example of pseudo-almost limit cycle. The figure below gives the phase portrait of (57) and the graph of the pseudo-almost periodic function in (58) (Fig. 12.12).

\(x(t) =\sin t +\sin \sqrt{2t} + \frac{1} {{t}^{2}+1}\ \text{and}\ \dot{x} = y,\quad \dot{y} = -x + (-\sin \sqrt{2t} + \frac{{t}^{2}({t}^{2}+4)} {{({t}^{2}+1)}^{3}} )\)
Liénard Pseudo-Almost Limit Cycles
We now reconsider the above Liénard systems (20) and (21) under a forcing term that is now assumed to be a pseudo-almost function. As stated above in the case of an almost periodic forcing, the assumptions entail the existence of a unique solution that settles in the bounded region E for all time. Moreover the proof of Theorem 5 leads to the following:
Proposition 7.
Assume the conditions A 1 ,…,A 4 . Let γ(t) = (x(t),y(t)) be a solution of the system, and \(\tilde{\gamma }(t) = (\tilde{x}(t),\tilde{y}(t))\) either another solution of the system or a solution of an associated system with a sufficiently small perturbation \(\bar{h}(t)\) of the forcing term h(t). Then we have
that is,
Proof.
It is a direct consequence of the lines of proof for theorem (cite here). That is, the solutions of the system associated to the perturbed forcing term ultimately converge to the solutions of the original system. □
We now state and prove the main result of this section.
Theorem 6.
Assume the forcing term h(t) is a pseudo-almost periodic function. Then under the conditions (A 1 ),…,(A 4 ), the pseudo-almost periodically forced Liénard system has a unique stable pseudo-almost limit cycle.
Proof.
The proof is based on the previous proposition, including the existence of a unique solution enclosed in E for all time. First assuming the forcing term h(t) is pseudo-almost periodic entails from the definition above that, for any arbitrary ε, there exists δ = δ(ε), an ε-pseudo-almost period \(\tau \in \mathcal{D}_{\epsilon },\) a relatively dense set in R such that
and
where C ε is the ergodic zero set defined above. For such an ε-pseudo-almost period, consider the unique solution \(\bar{\gamma }(t)\) given in the previous lemma that settles in E for all time t ∈ ( − ∞, ∞), and the associated function \(\bar{\gamma }(t+\tau ) = (\bar{x}(t+\tau ),\bar{y}(t+\tau )).\) This function is readily a solution of the following system \((\mathcal{E}_{\tau })\)
Take h(t + τ) as a sufficiently small perturbation of h(t) as above. Therefore, according to the previous propositions, the solutions \(\bar{\gamma }(t)\) and \(\bar{\gamma }(t+\tau )\) converge. Thus, we obtain
Moreover we also have, for \(t_{1},t_{2} \in \mathbf{R} - C_{\epsilon },\)
which ensures the existence of δ such that
Therefore, we conclude that the unique solution \(\bar{\gamma }(t)\) is pseudo-almost periodic.
Moreover, from the previous proposition, all other solutions of the system that ultimately settle in E converge to this unique pseudo-almost periodic solution \(\bar{\gamma }(t) \in E.\) Therefore, the system has a unique (isolated) almost periodic solution to which any other solution unwinds in the C 1-bounded set E. It is a stable almost limit cycle as defined above. Hence the claim. □
Remarks
For a Liénard system under the assumptions stated above, a forcing term, respectively, periodic, almost periodic, and pseudo-almost periodic leads to the emergence, respectively, of a unique stable limit cycle, stable almost limit cycles, and pseudo-almost limit cycles. Such characteristics, if need be, add to the “mathematical beauty and richness” of the Liénard systems. We derive the following natural question as an open problem.
Open Problem
Re-parameterize the Liénard system if necessary and determine conditions under which the phase space could be partitioned in regions of limit cycles, almost limit cycles, and pseudo-almost limit cycles.
Almost and Pseudo-Almost Periodic Waves
The importance of Liénard systems among nonlinear systems also comes from the fact that several systems can be transformed into Liénard systems and solved [1, 17, 19, 20]. We present next some partial differential equations solvable first by reducing them to some Liénard-type equations, then by applying the previous theorems.
Illustrative Example 1
Consider systems described by the time-perturbed nonlinear hyperbolic equation
The search of special solutions of the form
defining the wave with speed | c | yields the Liénard-type equation
Define \(f(y) = \frac{f_{0}(y)} {1-{c}^{2}} ,\) \(g(y) = \frac{g_{0}(y)} {1-{c}^{2})},\) and \(h(t) = \frac{-p(t)} {1-{c}^{2}} .\) The functions f 0 and g 0 are continuously differentiable chosen together with the speed | c | of the waves u(t, x) such that the functions f, g, and h satisfy the assumptions (A 1), …, (A 4). Obviously p(t) almost periodic or pseudo-almost periodic implies h(t), respectively, almost or pseudo-almost periodic. Therefore, we conclude under these assumptions:
Theorem 7.
For an almost periodic perturbation p(t), the nonlinear hyperbolic equation \((\mathcal{H})\) has an almost periodic solitary wave \(u(x,t) = y(x + ct),\) where y(x) is an almost limit cycle of the perturbed Liénard-type equation (25) .
Proof.
The proof is immediate and is adapted from Theorems 5 and 6. □
In the same lines we prove:
Theorem 8.
For a pseudo-almost periodic perturbation p(t), the nonlinear hyperbolic equation \((\mathcal{H})\) has a pseudo-almost periodic solitary wave \(u(x,t) = y(x + ct),\) where y(x) is a pseudo-almost limit cycle of the perturbed Liénard-type equation (25) .
We next consider a parabolic partial differential equation describing a reaction-diffusion equation.
Reaction-Diffusion Model
Consider now the time-perturbed parabolic equation describing a reaction-diffusion model
Looking again for special solutions of the form (24) leads to the Liénard-type equation
As in the previous case we set \(f(y) = f_{0}(y) - c,\) g(y) = g 0(y), and \(h(t) = -p(t).\) The functions f 0 and g 0 are continuously differentiable are determined together with the speed | c | of the waves u(t, x) such that the functions f, g, and h satisfy the assumptions (A 1), …, (A 4). Obviously p(t) almost periodic or pseudo-almost periodic implies h(t), respectively, almost or pseudo-almost periodic. We therefore obtain the equivalent theorems of existence of almost and pseudo-almost solitary waves to the reaction-diffusion equation as functions of the corresponding Liénard almost and pseudo-almost limit cycles, as in Theorems 7 and 8.
Outlook and Open Problems
Arnold in [5] states
Une trajectoire fermée nondégénérée ne disparait pas par une petite déformation du système, mais se déforme légèrement. Donc le système des trajectoires est structurellement stable dans le voisinage de la trajectoire fermée générique.
That is, periodic orbits do not just disappear under small perturbation, but they may be slightly deformed, due to the fact that the system of trajectories is structurally stable in the neighborhood of a periodic orbit.
Many forced systems such as the Liénard ones are actually small perturbations of systems having periodic orbits (limit cycles) in their unperturbed form, and many results such as the above ones are about the existence and uniqueness of almost periodic solution with no mention of the fate of the periodic orbit(s) existing before perturbation. The appearing of almost or pseudo-almost periodic solutions could only results from the bifurcation of the generic orbits for a parameterized system. Therefore, one must investigate the relation between the “new” almost periodic solutions appearing upon perturbation and the periodic orbits of the unperturbed system. For instance, to uncover the existence of the so-called limit periodic almost limit cycles, where a sequence of periodic orbits such as in the linear isochrone \(\dot{x} = -y\quad \dot{y} = x\) accumulate on the new almost/pseudo-almost limit cycle.
The following open problems should be of interest to the community of pure and applied mathematicians including graduate students. Note first that a periodic function is also almost periodic and pseudo-almost periodic, as an almost periodic function is also pseudo-almost periodic with a zero ergodic perturbation. Consequently a limit cycle is also an almost or a pseudo-almost limit cycle, but not inversely. To make the distinction, we will call strictly almost limit cycles and strictly pseudo-almost limit cycles, respectively, those almost or pseudo-almost limit cycles that are not limit cycles.
Open Problem 1
Complete a full study of the bifurcation of strictly almost/pseudo-almost limit cycles in the above forced Liénard systems when the parameter value μ varies in order to investigate conditions on the functions f and g for which the strictly almost/pseudo-almost limit cycles that exist for μ ≪ 1 could persist for μ = 1, and eventually accumulate when μ → 1.
Open Problem 2: Linear Almost and Pseudo-almost Center
Determine the conditions of existence for a continuum of parameterized families of strictly almost and pseudo-almost trajectories possibly surrounding a critical point. Such continuum defines, respectively, the linear almost center and the linear pseudo-almost center.
Open Problem 3: Multiple Almost and Pseudo-almost Limit Cycles
Find parameterized systems and determine conditions under which exist in the same phase space multiple strictly almost or pseudo-almost limit cycles, similar to several examples in the case of the usual normal limit cycles.
Open Problem 4: Coexistence of Limit Cycles and Almost and/or Pseudo-Almost Limit Cycles
Find parameterized systems and determine conditions under which coexist in the phase space limit cycles and strictly almost or pseudo-almost limit cycles.
Open Problem 5: Isochronous Almost and Pseudo-almost Limit Cycles
Let γ be a strictly almost or pseudo-almost limit cycle of a flow ϕ on R n as in Section “Overview of limit cycles”. A point x 1 in R n has asymptotic phase with respect to γ if there is a point x 0 ∈ γ such that \(\lim _{t\rightarrow \pm \infty }\vert \phi _{t}(x_{1}) -\phi _{t}(x_{0})\vert = 0.\) We say that x 1 is in phase with x 0.
It is well known that a hyperbolic limit cycle has some neighborhood where every point has asymptotic phase with respect to the limit cycle, due to the existence of invariant foliation. Similar question needs to be addressed as well in case of strictly almost or pseudo-almost limit cycles.
Definition 7.
A strictly almost or pseudo-almost limit cycle is said to be isochronous if there is a neighborhood of γ in which every point is in phase with a point on γ.
In the case of limit cycles, we have, for instance, the following examples.
-
1.
The system
$$\displaystyle{ \dot{r} = -{(r - 1)}^{2},\quad \dot{\theta } = 2\pi + (r - 1) }$$(68)in polar coordinate (r, θ) has a nonhyperbolic limit cycle γ at r = 1, attracting for r > 1 and repelling for r < 1, but nonisochronous. Indeed no point \((r_{0},\theta _{0}),\quad r_{0} > 0\) has asymptotic phase with γ. For more details, see [10]. The nonisochronous limit cycle is represented below (Fig. 12.13).
Fig. 12.13 
\(\dot{r} = -{(r - 1)}^{2},\dot{\theta }= 2\pi + (r - 1)\)
-
2.
The system
$$\displaystyle{ \dot{r} = -\frac{1} {3}{(r - 1)}^{4}{e}^{\vert r-1{\vert }^{-3} },\quad \dot{\theta } = 2\pi }$$(69)has a nonhyperbolic limit cycle at the unit cycle with period 1, attracting for r > 1. The asymptotic phase of any point (r 0, θ 0) in its neighborhood is (1, θ 0). The limit cycle is therefore isochronous. For more details, see [10]. The isochronous limit cycle is represented below (Fig. 12.14).
Fig. 12.14 
\(\dot{r} = -\frac{1} {3}{(r - 1)}^{4}{e}^{\vert r-1{\vert }^{-3} },\dot{\theta }= 2\pi\)


It would be interesting to:
-
1.
Perturb systems (68) and (69), in particular in the angle variable, and study the conditions of appearance of strictly almost and/or pseudo-almost limit cycles
-
2.
Investigate the conditions of existence of isochronous strictly almost or pseudo-almost limit cycles, in particular for the forced Liénard systems
Open Problem 6: Almost and Pseudo-almost Isochrons
Following the previous open problem, we further define:
Definition 8.
Given x 0 ∈ γ where γ is a strictly almost or pseudo-almost limit cycle, an almost or pseudo-almost isochron I(x 0) based at x 0 is the set of all point x ∈ R n in phase with x 0.
As in the case of limit cycles we conjecture the existence of almost or pseudo-almost isochrons and that they will foliate the neighborhood of almost or pseudo-almost limit cycles. Their determination is definitely an interesting but difficult question of research. One line of attack might be similar to Guckenheimer and Winfree investigation of isochrons of limit cycles [3, 19, 33, 34].
Open Problem 7: Transition to Chaos
It would be interesting to investigate the possibility for a strictly almost or pseudo-almost behavior to transition to a chaotic behavior. Such study could initiate with coupling of forced Liénard oscillators, as in the following example. Consider two almost or pseudo-almost self-sustained oscillators given by forced Liénard systems under the coupling described as follows:
where h(t) is almost or pseudo-almost periodic, K is the feedback coupling coefficient, t 0 the onset time of synchronization process, and H(z) the Heaviside function defined as
Introduce the new variable \(z(t) = y(t) - x(t)\) to measure the closeness between solutions of (70) and (71) and then analyze the resulting second-order equation. The question is to find the appropriate coupling coefficients and conditions on f α and g β which enable (70) to adjust its oscillations and to synchronize with (71).
To fix ideas one may start with f α and g β such as the systems are two driven chaotic Van der Pol-Duffing systems, paradigm for relaxation oscillations and chaotic behavior in small ranges of control parameter, and also systems well known to be generalized by the Liénard systems. The relevant references include [3, 10, 24, 27, 30].
References
Albarakati, W.A., Lloyd, N.G., Pearson, J.M.: Transformation to Liénard form. EJDE 2000(76), 1–11 (2000)
Amerio, L.: Soluzioni quasi-periodiche, o limitate, di sistemi differenziali non lineari quasi-periodici, o limitati Annali di Matematica Pura ed Applicata 39, 97–119 (1955)
Amor, H.B., Glade, N., Lobos, C., Demongeot, J.: The isochronal fibration: characterization and implication in biology. Acta Biotheor. 58(2), 121–142 (2010)
Andronov, A.A. et al.: Theory of Oscillators Dover, New York (1989)
Arnold, V.: Chapites supplémentaires de la Théorie des équations différentielles ordinaires. Editions MIR, Moscou (1978)
Bohr, H.A.: Almost Periodic Functions. Chelsea, New York (1951)
Brauer, S.G., Nohel, J.A.: The Qualitative Theory of Ordinary Differential Equations. W.A. Benjamin, New York (1968)
Byrnes, C.: Topological methods for nonlinear oscillations. Not. AMS 57(9), 1080–1091 (2010)
Cartwright, M.L., Littlewood, J.E.: On non-linear differential equations of the second order II. Ann.Math. 48(2), 472–494 (1947)
Chicone, C., Liu, W.: Asymptotic phase revisited. J. Differ. Equat. 204, 227–246 (2004)
Christopher, C., Li, C.: Limit Cycles of Differential Equations. Birkhauser Verlag, Basel-Boston-Berlin (2007)
Coddington, E.A., Levinson, N.: Theory of Ordinary Differential Equations. Mc-Graw-Hill, New York (1953)
Corduneanu, C.: Almost Periodic Oscillations and Waves. Springer, New York (2009)
Diagana, T.: Pseudo Almost Periodic Functions in Banach Spaces. Nova Publishers, New York (2007)
Dumortier, F.: Qualitative Theory of Planar Differential Systems. Springer, New York (2006)
Ecalle, J. et al.: Non-accumulation des cycles limites I-II. C. R. Acad. Sci. Paris I(304), 375–431 (1987)
Fink, A.M.: Convergence and almost periodicity of solutions of forced Liénard equations. SIAM J. Appl. Math. 26(1), 6–34 (1974)
Guckenheimer, J., Holmes, P.: Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields. Springer, New York (1983)
Guckenheimer, J.: Isochrons and phaseless sets. J. Math. Biol. 1, 259–273 (1975)
Hilbert, D.: Mathematical problems. Bull. Amer. Math. Soc. 8, 437–479 (1902)
Jordan, D.W., Smith, P.: Nonlinear Ordinary Differential Equations, 4th edn. Oxford University Press, Oxford (2007)
Lloyd, N.G.: Liénard systems with several limit cycles. Math. Proc. Camb. Phil. 102(03), 565–572 (1987)
Loud, W.S.: Boundedness and convergence of solutions of \(x^{\prime\prime} + cx^\prime + g(x) = e(t)\). Duke Math. J. 24, 63–72 (1957)
Leung, H.K.: Synchronization dynamics of coupled Van der Pol systems. Phys. A 321, 248–255 (2003)
N’Guérékata, G.M.: Almost Automorphic Functions and Almost Periodic Functions in Abstract Spaces. Kluwer Academic/Plenum Publishers, New York-London-Moscow (2001)
Opial, Z.: Sur les solutions périodiques et presque-périodiques de l’équations differentielle \(x^{\prime\prime} + kf(x)x^\prime + g(x) = kp(t)\). Annales Polonici Mathematici VII, 309–319 (1960)
Pecora, L.M., Caroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64–821 (1990)
Poincaré, H.: Mémoire sur les courbes définies par une équation differentielle. J. Math. Pure Appl. 7, 375–422 (1881)
Reuters, G.E.H.: On certain non-linear differential equaions with almost periodic solutions. J. Lond. Math. Soc. 26, 215–221 (1951)
Szemplinska-Stupnicka, W., Rudonski, J.: The coexistence of periodic, almost periodic, and chaotic attractors in the Van der Pol-Duffing oscillator. J. Sound Vib. 199, 165 (1997)
Toni, B.: Almost and pseudo-almost limit cycles for some forced Liénard systems. Nonlinear Anal. 71, 4718–4724 (2009)
Toni, B.: Upper bounds of limit cycles from isochronous period annulus via birational linearization. Discrete Contin. Syst. 2005(Supp), 846–853 (2005)
Winfree, A.T.: The Geometry of Biological Time. Springer, New York (2001)
Winfree, A.T.: Patterns of phase compromise in biological cycles. J. Math. Biol. 1, 73–95 (1974)
Zhang, C.: Almost periodic type functions and ergodicity. Science Press/Kluwer Academic Publishers (2003)
Acknowledgements
The authors express appreciation for the referees’ time and efforts and for their valuable suggestions and corrections that help improve the quality of this chapter.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media New York
About this paper
Cite this paper
Toni, B., Watts, M. (2013). Almost and Pseudo-Almost Limit Cycles with Applications to Quasiperiodic Solitary Waves. In: Toni, B. (eds) Advances in Interdisciplinary Mathematical Research. Springer Proceedings in Mathematics & Statistics, vol 37. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-6345-0_12
Download citation
DOI: https://doi.org/10.1007/978-1-4614-6345-0_12
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-6344-3
Online ISBN: 978-1-4614-6345-0
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)