
Abstract
Three behavioral-epidemic models (i.e., epidemic systems including feedbacks (FB) that the information about an infectious disease has on its spreading) are introduced. Two relevant FB are explicitly considered: the pseudo-rational exemption to vaccination and the information-related changes in contact patterns by healthy subjects. The global stability analysis of the endemic states is performed by means of the geometric approach to stability, with particular focus on a model of vaccination of adult susceptible subjects. Biological implications of the results are discussed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Feedbacks (FB) and global stability are among the most important features of all mathematical models in biology [15, 35]. In mathematical epidemiology (ME) the vast majority of efforts have been devoted to the study of global stability. Indeed, determining under which conditions a disease, independently from the initial burden, either remain endemic or get extinct is probably the most important topic.
Recently, however, it is increasingly becoming clear that a realistic epidemic model must include the FB that the information about an infectious disease has on its spreading [3, 16, 17, 36, 38].
A first type of FB is the pseudo-rational exemption which is defined as the family’s decision to not vaccinate children because of a pseudo-rational comparison between the perceived risk of infection and the perceived risk of side effects caused by the vaccine. This type of FB has a paramount relevance in nonmandatory vaccinations. Indeed, the progress toward increasing degrees of disease control is intermixed by temporal trends of declining vaccination coverage [37]. Especially modern societies (where the vaccinations are increasingly voluntary) face the challenging paradox of pseudo-rational exemption. The paradox stems in the fact that the vaccination success makes very low the perceived risk of infection, so that the risk of side effects appears erroneously huge.
This peculiar unbalance of perceptions, particularly large in transient period of low disease incidence, induces dynamics that cannot be captured by traditional mathematical models of infectious diseases spreading and vaccinations.
A second type of FB is the one given by the influence of the information on the behavior of healthy subjects. For example, in [16] the authors consider simple epidemic models in which the social contact rate is described as a decreasing function of the available information on the present and the past disease prevalence. It is shown that social behavior change alone may trigger sustained oscillations that, in case of seasonal fluctuation in the contact rate, can degenerate and become chaotic. This indicates that human behavior might be a critical explaining factor of oscillations in time series of endemic diseases.
The role of human behavior and also misbehaviors (as the above-mentioned pseudo-rational exemption) has thus to be included in some manner in the modeling of infectious disease spreading, which is triggering a large corpus of scientific research (see, just to name a few contributors [1–3, 6, 21, 23, 36]) which is the subject of this book.
For example, in [17, 18], the dynamic implications of rational exemption were investigated by using a simple extension of the standard susceptible-infectious-removed (SIR) model, where the information-dependent vaccination is modeled by means of a simple information index mostly based on the publicly available information on the disease, as reviewed and extended in the contribution by d’Onofrio and Manfredi in this book. In this simple framework, the vaccination coverage is modeled as a phenomenological function of the current and past state of the disease (see also the game-funded function employed in [36]), defined as the sum of a constant component plus a variable one, increasing with the perceived risk of infection.
In [17, 18] it was shown that if the baseline rate of vaccination does not exceed the so-called May–Anderson threshold, then a globally or also only locally stable eradication is impossible, and there is an endemic equilibrium, whose stability was studied only from the local point of view.
However, a global analysis of stability is of the outmost importance from an epidemiological point of view. Indeed, if the endemic equilibrium is GAS, then, also in case of infinitesimal initial prevalence, the disease will permanently be present in the population.
From a mathematical point of view, the analysis of the GAS of the endemic equilibria of bidimensional epidemic systems may be usefully approached by means of the Poincaré–Bendixson trichotomy. Less simple is the study in dimensions n ≥ 3. A major progress was achieved in the 1990s, when Li and Muldowney developed a generalization of the Poincaré–Bendixson criterion for systems of n ordinary differential equations (ODEs), with n ≥ 3 [28, 30] the so-called geometric approach to global stability. Since its development [29], their approach has been (and currently is being) extensively applied to the study of the global behavior of mathematical models arising in ME and in several other different biomathematical contexts, such as toxicant–population interaction models [10, 11], Lotka–Volterra models including delay [4, 5], and ME-like models of dynamics of HIV in a human host [14, 39]. As far as ME is concerned, the majority of applications of this method refer SIR models including the exposed class, i.e., SEIR, SEIS, and SEIRS models (see, e.g., [27, 29–31]). The SEIR-like models are represented by a system of four ODEs. Its dynamics can be usually deduced by studying a reduced three ODEs system in the variables, say, x, y, and z. Usually, the only nonlinearity is given by the incidence rate of the infectious disease. When it is postulated that the spread of the disease occurs according to the principle of mass action, then the corresponding incidence rate is bilinear with respect to the susceptibles and infective populations [15]. In this case such a bilinearity represents the only nonlinearity of the model. The bilinearity is of kind “xz” and is included in the balance equations of the variables x and y. Generally speaking, the structure of SEIR-like systems appears to be particularly suitable for the applications of the geometric method for global stability [12, 13]. However, several well-known models present a different bilinearity. That is, the balance equations of the variables x and y contain a bilinearity of kind “xy” instead of “xz.” A simple example is the classical SIRS model with temporary immunity [24]:
where the upper dot denotes the time derivative, \(d \cdot /dt\), and the k i ’s are all positive parameters. Sometimes, systems like Eq. (1) may be reduced to a planar system. However, if no reduction is available, the stability analysis for system (1), or systems with a similar structure (which we call SIR-like models), may become quite involved. In such cases, the geometric approach to global stability may be a powerful tool [26]. Nevertheless, applications of the method to SIR-like models are not very common in the literature. We want to illustrate, by means of a new example and by means of the brief review of some previously published results, the utility of the geometric approach to global stability in the framework of the information-dependent epidemic models of behavioral epidemiology.
We start by giving a complete global analysis of a model of vaccinations at all ages, which was defined but incompletely studied in [17]. This model is particularly interesting since in it the vaccinations are distributed in all ages. We provide here for the first time its complete global analytical study.
2 Information-Dependent Vaccinations on All Ages
In [17] the following information-dependent vaccination model was introduced:
The state variables S and I denote, respectively, the fraction of the susceptible individuals and the fraction of the infectious and infective individuals at time t. The variable M is addressed to be the information variable and summarizes information about the past values of the disease. All the parameters in Eq. (2) are strictly positive constants. The function \(\varphi (M)\) models the information-dependent rate of vaccinations, and it may be, for ease of biological interpretation, split as follows:
Here, \(\varphi _{0}\) is a positive constant representing the fraction of susceptibles that are vaccinated independently on the available current and historical information on the prevalence level of the disease in the population and \(\varphi _{1}(M)\) models the fraction of susceptibles that are vaccinated in dependence of the social alarm caused by the disease.
The function g describes the role played by the infectious size in the information dynamics.
We assume that (1) \(\varphi _{1}(M)\) and g(I) are continuous and differentiable, except in some cases, at finite number points; (2) \(\varphi _{1}(M) \geq 0\), for all M, and g(I) ≥ 0, for all I; (3) \(\varphi _{1}(0) = 0\), and g(0) = 0; and (4) \(0 < \varphi _{1}^{{\prime}}(M) < \Phi \), \(0 < {g}^{{\prime}}(I) < \Gamma \), and for some constants Φ and Γ.
Specific functional forms of \(\varphi _{1}(M)\) turn out to be relevant for the applications, as the linear function,
where b is a positive constant or the Hill Order n function
where C > 0, D > 0. Similar functions may be chosen for g.
The information variable M is a function of the past values of I for two main reasons. From one hand, the information regarding the spread of a disease is seldom instantaneous, since it is generally subject to delays of technical nature due to the presence of time-consuming processes (clinical tests, notification of cases, the collecting and propagation of information and/or rumors, etc.). On the other hand, in some cases there can be a memory of the previous epidemics.
An important case of kernel K a (t) is the weak exponential delay kernel [32], \(K_{a}(t) = a{e}^{-at}\), where the parameter a assumes the biological meaning of inverse of the average delay of the collected information on the disease, as well as the average length of the historical memory concerning the disease in study. With this particular choice of the kernel, by applying the linear chain trick [32], the (infinite dimensional) nonlinear integro-differential system (2) is equivalent to the following set of (finite dimensional) nonlinear ODEs:
2.1 Basic Properties
It is easy to check that model (3) admits the disease-free equilibrium E 0 = (A, 0, 0), where \(A = \mu /(\mu + \varphi _{0})\). Note that if it were \(\varphi _{0} \geq \nu \), then this inequality would imply that \(A < \mu /(\mu + \nu ) << 1\). Indeed, the average duration of a disease (ν − 1) is much smaller than the average lifespan (\(L = {\mu }^{-1}\)). In other words, if we considered baseline vaccination rates \(\varphi _{0}\) equal or larger than the recovery rate ν, then at the disease-free equilibrium, the fraction of residual susceptible subjects would be so small to make rather pleonastic the study of the influence of information feedback. For these reasons, the analysis of model (3) will be performed under the realistic assumption
First we show that it exists an invariant adsorbing set in the state space.
Proposition 1.
The set
is positively invariant and absorbing and, as a consequence, the orbits of Eq. (3) are bounded, provided that \(\left (S(0),M(0),I(0)\right ) \geq (0,0,0)\).
Proof.
Defining \(\sigma = S + I\), one has that
thus,
As a consequence
From the following inequality
it follows that
and our claim is demonstrated.
Let us now denote \(R_{0} = \beta /(\mu + \nu )\) the basic reproduction number in absence of vaccinations. It follows that
Proposition 2.
if
then E 0 is GAS in Ω; otherwise, E 0 is unstable.
Proof.
The first claim easily follows from the following differential inequality:
The second claim follows from the linearized equation at E 0. Indeed, the equation for I reads as follows:
Note that if \(R_{0}A > 1\), then system (3) admits another equilibrium point, the endemic equilibrium \(E = ({S}^{{_\ast}},{M}^{{_\ast}},{I}^{{_\ast}}) = (1/R_{0},g({I}^{{_\ast}}),{I}^{{_\ast}})\), where \({I}^{{_\ast}}\in (0,1)\) is the unique solution of
We also remark that due to Eq. (4), the condition R 0 A > 1 reads \(\varphi _{0} < (R_{0} - 1)\mu \). In order to better appreciate this inequality, and since in absence of infection, the term \(1/(\varphi _{0} + \mu )\) is the average time of permanence in the susceptibility class, it is convenient to express \(\varphi _{0}^{-1}\) as a fraction of the average lifespan: \(\varphi _{0}^{-1} = f_{0}\,L\), where \(L = {\mu }^{-1}\) is the average lifespan and f 0 ∈ (0, 1). This allows to further rewrite the instability condition as \(f_{0} > 1/(R_{0} - 1)\).
The local stability analysis of the endemic equilibrium E may be performed by using the same procedure of Proposition 12 in [17]. System (3) may admit oscillatory solutions (in the sense of Yacubovitch [8, 19, 20]) as stated by the following theorem [8]:
Theorem 1.
If and only if
there exist two values a 1 and a 2 , with \(0 < a_{1} < a_{2}\) , for the parameter a, such that E is locally asymptotically stable (LAS) for \(a\notin [a_{1},a_{2}]\) . On the contrary, if \(a \in \left (a_{1},a_{2}\right )\) , then E is unstable, and the solutions of system (1) exhibit Yacubovitch oscillations. At the points a 1 and a 2 , Hopf bifurcations occur. If the reverse of Eq. (6) holds, then E is LAS.
2.2 Global Stability of the Endemic Equilibrium
Global stability analysis for the endemic equilibrium E will be performed through the approach due to Li and Muldowney [30].
When R 0 A > 1, the disease-free equilibrium, which is located on the boundary \(\partial \Omega \), is unstable, and this implies that system (3) is uniformly persistent [22], i.e., there exists a constant c > 0 such that any solution (S(t), M(t), I(t)) with (S(0), M(0), I(0)) in the interior of Ω, satisfies
The uniform persistence together with boundedness of Ω is equivalent to the existence of a compact set in the interior of Ω which is absorbing for Eq. (3), see [25]. This condition is required by the Li–Muldowney approach, together with a specific Bendixson criterion (inequality (34) in the Appendix) which will be the goal of the next theorem.
Theorem 2.
If R 0 A > 1 and
then the endemic equilibrium E of system(3) is globally asymptotically stable with respect to solutions of Eq. (3) initiating in the interior of Ω.
Proof.
We first observe that the second additive compound matrix \({J}^{[2]}(S,M,I)\) is given by
Now we take the function,
It follows,
and \(P{J}^{[2]}{P}^{-1} = {J}^{[2]}\) so that
where \(B_{11} = \frac{\dot{S}} {S} -\frac{\dot{I}} {I} - \mu - \beta I - \varphi (M) - a\), \(\;B_{12} = \left [a\,{g}^{{\prime}}(I),\;\beta S\right ]\), \(\;B_{21} ={ \left [0,\;-\beta I\right ]}^{T}\), and
Consider now the norm in { R} 3 as
where (u, v, w) denotes the vector in R 3 and denote by \(\mathcal{L}\) the Lozinskiĭ measure with respect to this norm. It follows [33]
where | B 21 | , | B 12 | are matrix norms with respect to the L 1 vector norm and \(\mathcal{L}_{1}\) denotes the Lozinskiĭ measure with respect to the L 1 norm.Footnote 1
Taking into account of Eqs. (11) and (12)–(15), the general expressions of g 1 and g 2 for system (3) are thus
and
Observe that system (3) provides the following equality:
hence, from Eq. (16) one gets
and from Eq. (17),
It follows
and
Hence, from Eq. (11),
i.e.,
where c is the constant of uniform persistence.
Now, impose that
This allows to conclude that
where
and ω > 0. Hence
and the Bendixson criterion given in [30] is thus verified. Finally, because of c > 0, conditions (20) are fulfilled if the inequalities (7)–(8) hold true.
Note that in the important case where g(I) = kI, the fulfillment of the assumptions that are needed by the above theorem implies a restriction for k in the range k ∈ (0, 1).
2.3 Information-Dependent Vaccinations of Newborns
In [17] the problem of information-driven vaccination of newborns was thoroughly analyzed both numerically and analytically, focusing, however, only on the local properties of the endemic equilibrium. In [7], we performed a global analysis, which we shall summarize here, for the important case g(I) = kI. The model is the following:
where the nondecreasing positive function p(M) models the proportion of vaccinated newborns, and it may be split as follows: \(p(M) = p_{0} + p_{1}(M).\) Here, p 0 models the fraction of newborns that are in any case vaccinated, whereas p 1(M) models the fraction of newborns that are vaccinated in dependence of the social alarm caused by the disease. Note that p 0 is lower than the minimum vaccination rate to obtain the eradication. Assume the following properties to hold: (1) \(0 \leq p_{1}(M) \leq 1 - p_{0}\), for all M; (2) p 1(0) = 0; (3) p 1(M) is continuous and differentiable, except in some cases, at finite number points; and (4) \(0 < p_{1}^{{\prime}}(M) < \Pi \), for some constant Π.
Proposition 3.
The set
is positively invariant and absorbing, and as a consequence, the orbits of Eq. (21) are bounded, provided that \(\left (S(0),M(0),I(0)\right ) \geq (0,0,0)\).
Theorem 3.
System(21) admits the disease-free equilibrium \(E_{0}(1 - p_{0},0,0)\) . If
then the equilibrium E 0 is unstable, and Eq. (21) admits also a unique endemic equilibrium with positive components,\(E = ({S}^{{_\ast}},{M}^{{_\ast}},{I}^{{_\ast}})\) , where \({S}^{{_\ast}} = \left (\mu + \nu \right )/\beta \),\({M}^{{_\ast}} = k{I}^{{_\ast}}\) , and I ∗ is the unique positive solution of
Moreover, if and only if
there exist two values a 1 and a 2 for the parameter a, with \(0 < a_{1} < a_{2}\) , such that E is unstable for \(a \in \left (a_{1},a_{2}\right )\) and the solutions of the system exhibit Yacubovitch oscillations, whereas it is locally asymptotically stable (LAS) for \(a\notin [a_{1},a_{2}]\) . At the points a 1 and a 2 , Hopf bifurcations occur. If the reverse of Eq. (23) holds, then E is LAS. Finally, if the reverse of Eq. (22) holds, then E 0 is globally asymptotically stable in Γ.
Reasoning as in Sect. 2.2, it can be shown that system (21), under the assumption (22), is uniformly persistent. Thus, in order to satisfy the Li–Muldowney theorem, it remains to find conditions for which the Bendixson criterion given by Eq. (34) is verified.
Theorem 4.
Under the assumptions(22) and
the endemic equilibrium E of system(21) exists and is globally asymptotically stable with respect to solutions of Eq. (21) initiating in the interior of Γ.
The proof of the above theorem, which is reported in [7], is obtained by means of the same function P and the same vector norm used for the proof of Theorem 2.
We remark that also here that the fulfilling of GAS conditions implies the restriction k ∈ (0, 1), as in the previous section. In view of this remark, the parameter k may play an interesting role on the stability properties of the endemic equilibrium. To elucidate this aspect, we will show, numerically, how the global stability properties of the endemic equilibrium E critically depend on the interplay between the parameters a and k.
As in [17], we choose \(p_{1}(M) = (1 - p_{0} - \epsilon )DM/(1 + DM)\), where ε and D are positive constants and ε is arbitrarily small.
Condition (23) can be rewritten as \(B_{1}^{2} - 4\beta {I}^{{_\ast}}(\nu + \mu ){(\beta {I}^{{_\ast}} + \mu )}^{2} > 0\), where,
Our purpose is to show that some set of parameter values exist such that hypotheses of Theorem 4 are verified.
We fix the parameter values as in [17]: \(\mu = 1/27375\) days − 1, ν = 0. 1429 days − 1, R 0 = 10, β = 1. 4289 days − 1, p 0 = 0. 75, D = 5000, ε = 0. 01. Furthermore, in the present case, \(\Pi \approx (1 - p_{0} - \epsilon )D\).
We observe that conditions (22) and (24) can be combined. It follows that, to apply Theorem 4, the bifurcation parameter a has to be chosen in the range a > a min , where
As it can be seen in Fig. 1, values of k exist such that the endemic equilibrium is LAS, independently of the delay (e.g., k = 0. 1 and k = 0. 2). For these choices of k, global stability properties of E are solely determined by condition a > a min . From Eq. (25), it follows that the region where a min is independent on k is (0, k c ), with
For the selected numerical values, \(k_{c} \approx 0.6437\) and
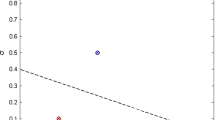
The function a min (k) is plotted in Fig. 2, where it is shown the GAS region in the (a, k) plane for the endemic equilibrium E. We can observe that, especially for medium–low values of k, 0 < k < k c , the GAS of E is always verified by both medium or high values of a, progressively increasing the value of k to approach 1; the values of a for which condition a > a min may be verified become progressively larger.

The local stability properties of the endemic equilibrium E, varying a and k. The numerical values for the other parameters are chosen as in [17]. Bifurcation diagram in the (k, a) plane: the dashed-dot branch (-.) is the a 1’s branch, and the dashed branch (- -) is the a 2’s branch. a 1 and a 2 are defined in Theorem 3. Figure from [7]: \(\text{ \copyright }\) Elsevier Science Ltd

Thus, if \(k <\approx 0.65\), according to our result, the GAS of the endemic equilibrium is guaranteed for values of the information delay up to \(\approx 2.5\) days. Only for \(k >\approx 0.855\), the GAS is guaranteed for delays that are less long than a single day.
The values of the parameter a, ensuring the local and the global stability of the equilibrium E, for different values of k, are summarized in Table 1. For \(a \in (0,a_{1}) \cup (a_{2},a_{min})\), the global stability for the endemic equilibrium may be only guessed.
3 FB on Behavior of Susceptible Subjects
In [16] the dynamics of interactions between susceptibles, infectious, and the information index is described by the following model:
where the function β is required to be a positive decreasing function and g such that g(0) = 0, and \({g}^{{\prime}}(I) > 0\). We will prove the global stability result of the endemic equilibrium for g satisfying
Both the previously mentioned functions g(I) = kI and \(g(I) = I/(1 + qI)\) fulfill the constraint (28).
In [16] it has been shown that the set
is positively invariant for model (27). Moreover the disease-free equilibrium E 0 = (1, 0, 0) is on \(\partial \Omega \), as well as its stable manifold, which is the set \(\left \{(S,I,M) \in \Omega : I = 0\right \}\). As a consequence, the state variables are strongly persistent. Furthermore, model (27) admits a unique endemic equilibrium, \(E = ({S}^{{_\ast}},{I}^{{_\ast}},{M}^{{_\ast}})\), where \({S}^{{_\ast}} = (\mu + \nu )/\beta (g({I}^{{_\ast}}))\), \({M}^{{_\ast}} = g({I}^{{_\ast}})\) and I ∗ is the unique solution of
Let us introduce the basic reproduction number
The following stability result holds [16]:
Theorem 5.
If R 0 ≤ 1, then the disease-free equilibrium E 0 is globally asymptotically stable. If R 0 > 1, then E 0 is unstable, and the endemic equilibrium E is locally asymptotically stable.
As far as the global stability of E is concerned, in [9] the following theorem has been proven:
Theorem 6.
Assume that g satisfies the inequality(28). If R 0 > 1 and
where \(\epsilon _{0}\) is the constant of uniform persistence, then the endemic equilibrium E of system(27) exists and is globally asymptotically stable with respect to solutions of Eq. (27) initiating in the interior of Ω.
The proof of the above theorem, which is reported in [9], is obtained by means of the same vector norm used for the proof of Theorem 2, but the following different P function is employed: \(P = diag\left (1,I/M,I/M\right )\).
3.1 A SIS Case
In this section we briefly analyze the impact of the information-driven behavior of susceptible subjects on the transmission of a SIS communicable disease.
By including the variable contact rate β(M) in the classical SIS model, we obtain the following system:
We can study the model on the plane (limit set) \(S + I = 1\). Model (31) reduces to
System (32) has two equilibrium points: a disease-free one, E 0 = (0, 0), and an endemic equilibrium \(E = (I_{e},g(I_{e}))\), where I e is the solution of the following equation:
The equilibrium E exists only if R 0 > 1, where R 0 is given by Eq. (29).
Stability properties are given in the following:
Theorem 7.
If R 0 ≤ 1, then the disease-free equilibrium E 0 is globally asymptotically stable. If R 0 > 1, then E 0 is unstable, and the endemic equilibrium E is globally asymptotically stable.
4 Conclusions
In this work, we consider three SIR epidemic models with information-dependent feedback. Our main goals are (1) to obtain (sufficient) conditions, expressed in terms of the parameters of the system, ensuring the global asymptotic stability of the unique endemic equilibrium, and (2) apply the geometric approach to global stability analysis, due to Li and Muldowney. This gives an example of the application of the method to a class of SIR-like models including peculiar nonlinearities, modeling new types of biological feedback mechanisms: the influence that the available information has on either vaccinating behaviors or on the contact behavior of the population.
We have obtained that imposing the conditions required by the Li–Muldowney approach (see (H1)–(H2) and Eq. (34) in the Appendix) leads to parameter restrictions in all the three considered cases.
We stress that the approach to stability applied in this chapter is based on two crucial choices: the entries of the matrix P and the vector norm in R 3. Clearly, different choices of the matrix P and of the vector norm may lead, in principle, to better sufficient conditions than the ones we found here, in the sense that the restrictions on the parameters may be weakened.
For example in the two cases involving vaccination (models (3) and (21)), when g(I) = kI, the range of variability of the parameter k is restricted to the interval (0, 1). This restriction may be discussed as follows. The parameter k may be seen as a “summary” of two contrasting phenomena:
-
The phenomenon of disease underreporting: for mainly technical reasons, the number of reported cases of an infectious disease is in any case smaller than the real number, leading to an underestimate of the infectious fraction I.
-
The level of media and rumors coverage of the state of a disease, which tends to amplify the social alarm.
Thus, we could decompose k as follows: \(k = k_{underreporting} \times k_{media}\), where in all cases 0 < k underreporting ≤ 1 and where generally k media > 1, although one may depict a realistic scenario where, in order to avoid extreme social alarm, or because of lack of mediatic “appeal” of the disease, media would lower the focus on the disease, implying that 0 < k media < 1. Finally, of course, there is the case of totally objective press: k media = 1. Consequently,
-
The cases of objective and of alarm-avoiding media are fully described by the constraint k ∈ (0, 1).
-
The case of “amplifying” media may be well modeled provided that \(k_{media} < k_{underreporting}^{-1}\).
These considerations suggested that, in the case of vaccination of newborns, the role of the parameter k was worth further investigations via a numerical bifurcation analysis. We obtained that if k exceeds a threshold depending on a, k ∗ (a), limit cycles arise through Hopf bifurcations at k = k ∗ (a). We may read this phenomenon as follows:
-
If the media coverage is low, then the “rational exemption” leads to a globally stable endemic state.
-
On the contrary, if the “media exposure” exceeds a threshold that interestingly depends on a, then a destabilization appears and oscillations arise.
Finally, in the case of information feedback on contact behavior for SIS epidemic diseases, we obtained that the endemic equilibrium is GAS in a way independent from any constraints on the epidemic, information, and delay parameters.
5 Appendix
Here, we will shortly describe the general method developed in Li and Muldowney, [30]. Consider the autonomous dynamical system:
where \(f : D \rightarrow {\mathbf{R}}^{n}\), \(D \subset {\mathbf{R}}^{n}\) open set and simply connected and f ∈ C 1(D). Let x ∗ be an equilibrium of Eq. (33), i.e., f(x ∗ ) = 0. We recall that x ∗ is said to be globally stable in D if it is locally stable and all trajectories in D converge to x ∗ .
Assume that the following hypotheses hold:
(H1) There exists a compact absorbing set \(K \subset D\).
(H2)Equation (33) has a unique equilibrium x ∗ in D.
The basic idea of this method is that if the equilibrium x ∗ is (locally) stable, then the global stability is assured provided that (H1)–(H2) hold and no nonconstant periodic solution of Eq. (33) exists. Therefore, sufficient conditions on f capable to preclude the existence of such solutions have to be detected.
Li and Muldowney showed that if (H1)–(H2) hold and Eq. (33) satisfies a Bendixson criterion that is robust under C 1 local \(\epsilon \)-perturbationsFootnote 2 of f at all nonequilibrium non-wanderingFootnote 3 points for Eq. (33), then x ∗ is globally stable in D provided it is stable. Then, a new Bendixson criterion robust under C 1 local ε-perturbation and based on the use of the Lozinskiĭ measure is introduced.
Let P(x) be a \((\begin{array}{c} n\\ 2 \end{array} )\times (\begin{array}{c} n\\ 2 \end{array} )\)matrix-valued function that is C 1 on D and consider
where the matrix P f is
and the matrix J [2] is the second additive compound matrix of the Jacobian matrix J, i.e., J(x) = Df(x). Generally speaking, for an n ×n matrix J = (J ij ), J [2] is a \((\begin{array}{c} n\\ 2 \end{array} )\times (\begin{array}{c} n\\ 2 \end{array} )\) matrix (for a survey on compound matrices and their relations to differential equations, see [34]) and in the special case n = 3, one has
Consider the Lozinskiĭ measure \(\mathcal{L}\) of B with respect to a vector norm \(\cdot \) in \({\mathbf{R}}^{N},\ N = (\begin{array}{c} n\\ 2 \end{array} )\) (see [33 ])
It is proved in [30] that if (H1) and (H2) hold, condition
guarantees that there are no orbits giving rise to a simple closed rectifiable curve in D which is invariant for Eq. (33), i.e., periodic orbits, homoclinic orbits, and heteroclinic cycles. In particular, condition (34) is proved to be a robust Bendixson criterion for Eq. (33). Besides, it is remarked that under the assumptions (H1)–(H2), condition (34) also implies the local stability of x ∗ .
As a consequence, the following theorem holds [30]:
Theorem 8.
Assume that conditions (H1)–(H2) hold. Then x ∗ is globally asymptotically stable in D provided that a function P(x) and a Lozinskiĭ measure \(\mathcal{L}\) exist such that condition (34) is satisfied.
Notes
- 1.
That is, for the generic matrix A = (a ij ), \(\vert A\vert =\max _{1\leq k\leq n}\sum\limits _{j=1}^{n}\vert a_{jk}\vert \) and \(\mathcal{L}(A) =\max _{1\leq k\leq n}(a_{kk} + \sum\limits _{j=1(j\neq k)}^{n}\vert a_{jk}\vert )\).
- 2.
A function \(g \in {C}^{1}(D \rightarrow {\text{R}}^{n})\) is called a C 1 local ε-perturbation of f at x 0 ∈ D if there exists an open neighborhood U of x 0 in D such that the support supp(f − g)\(\subset U\) and \(f - g_{{C}^{1}} < \epsilon \), where \(f - g_{{C}^{1}} =\sup \left \{f(x) - g(x) + f_{x}(x) - g_{x}(x) : x \in D\right \}\).
- 3.
A point x 0 ∈ D is said to be non-wandering for Eq. (33) if for any neighborhood U of x 0 in D and there exists arbitrarily large t such that \(U \cap x(t,U)\neq \varnothing \). For example, any equilibrium, alpha limit point or omega limit point, is non-wandering.
References
Auld, C.: J. Health Econ. 22, 361–377 (2003)
Bauch, C.T.: Proc. Royal Soc. London B 272, 1669–1675 (2005)
Bauch, C.T., Earn, D.: PNAS 101, 13391–13394 (2004)
Beretta, E., Kon, R., Takeuchi, Y.: Nonlinear Anal. RWA 3, 107–129 (2002)
Beretta, E., Solimano, F., Takeuchi, Y.: Nonlinear Anal. TMA 50, 941–966 (2002)
Brito, D.L., Sheshinski, E., Intriligator, M.D.: J. Public Econ. 45, 69–90 (1991)
Buonomo, B., d’Onofrio, A., Lacitignola, D.: Math. Biosci. 216, 9–16 (2008)
Buonomo, B., d’Onofrio, A., Lacitignola, D.: Math. Biosci. Eng. 7, 561–578 (2010)
Buonomo, B., d’Onofrio, A., Lacitignola, D.: Appl. Math. Lett. 25, 1056–1060 (2012)
Buonomo, B., Lacitignola, D.: Nonlinear Anal. RWA 5, 749–762 (2004)
Buonomo, B., Lacitignola, D.: Proc. Dyn. Syst. Appl. 4, 53–57 (2004)
Buonomo, B., Lacitignola, D.: J. Math. Anal. Appl. 348, 255–266 (2008)
Buonomo, B., Lacitignola, D.: In: Manganaro, N., et al. (eds.) Proceedings of Waves and Stability in Continuous Media, Scicli, Italy, June 2007, pp 78–83. World Scientific, Hackensack (2008)
Buonomo, B., Vargas De-León, C.: J. Math. Anal. Appl. 385, 709–720 (2012)
Capasso, V.: Mathematical structures of epidemic systems. In: Lecture Notes in Biomathematics. Springer, Berlin (2008)
d’Onofrio, A., Manfredi, P.: J. Theor. Biol. 256, 473–478 (2009)
d’Onofrio, A., Manfredi, P., Salinelli, E.: Theor. Pop. Biol. 71, 301–317 (2007)
d’Onofrio, A., Manfredi, P., Salinelli, E.: Math. Med. Biol. 25, 337–357 (2008)
Efimov, D.V., Fradkov, A.L.: Math. Biosc. 216, 187–191 (2008)
Efimov, D.V., Fradkov, A.L.: Siam J. Contr. Optim. 48, 618–640 (2009)
Fine, P., Clarkson, J.: Am. J. Epidemiol. 124, 1012–1020 (1986)
Freedman, H.I., Ruan, S., Tang, M.: J. Diff. Eq. 6, 583–600 (1994)
Geoffard, P.Y., Philipson, T.: Am. Econ. Rev. 87, 222–230 (1997)
Hethcote, H.W.: Math. Biosci. 28, 335–356 (1976)
Hutson, V., Schmitt, K.: Math. Biosci. 111, 1–71 (1992)
Iwami, S., Takeuchi, Y., Liu, X.: Math. Biosci. 207, 1–25 (2007)
Li, M.Y., Graef, J.R., Wang, L., Karsai, J.: Math. Biosci. 160, 191–213 (1999)
Li, M.Y., Muldowney, J.S.: J. Diff. Eq. 106, 27–39 (1993)
Li, M.Y., Muldowney, J.S.: Math. Biosci. 125, 155–164 (1995)
Li, M.Y., Muldowney, J.S.: SIAM J. Math. Anal. 27, 1070–1083 (1996)
Li, G., Wang, W., Jin, Z.: Chaos Soliton. Fract. 30, 1012–1019 (2006)
MacDonald, N.: Biological Delay Systems: Linear Stability Theory. Cambridge University Press, Cambridge (1989)
Martin Jr, R.H.: J. Math. Anal. Appl. 45, 432–454 (1974)
Muldowney, J.S.: Rocky Mount. J. Math. 20, 857–872 (1990)
Murray, J.D.: Mathematical Biology. Interdisciplinary Applied Mathematics, vol. 17. Springer, Heidelberg (2002)
Reluga, T.C., Bauch, C.T., Galvani, A.P.: Math. Biosci. 204, 185–198 (2006)
Salmon, D.A., Teret, S.P., Raina MacIntyre, C., et al.: Lancet 367, 436–442 (2006)
Vardavas, R., Breban, R., Blower, S.: PLoS Comp. Biol. 3, e85 (2007)
Wang, L., Li, M.Y.: Math. Biosci. 200, 44–57 (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media New York
About this chapter
Cite this chapter
Buonomo, B., d’Onofrio, A., Lacitignola, D. (2013). The Geometric Approach to Global Stability in Behavioral Epidemiology. In: Manfredi, P., D'Onofrio, A. (eds) Modeling the Interplay Between Human Behavior and the Spread of Infectious Diseases. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-5474-8_18
Download citation
DOI: https://doi.org/10.1007/978-1-4614-5474-8_18
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-5473-1
Online ISBN: 978-1-4614-5474-8
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)