
Abstract
The aim of the present chapter is to advocate for a very effective stochastic procedure based on the First-Order Reliability method (FORM) and Monte Carlo simulations (MCS), for prediction of parametric rolling in stationary stochastic seaways. Due to efficient optimization procedures implemented in standard FORM codes and the short duration of the time domain simulations needed, the calculation of the mean out-crossing rates of any given roll response is very fast. Thus complicated nonlinear effects can be included. Furthermore, the FORM analysis also identifies the most probable wave episodes leading to given roll responses. Because of the linearization in the FORM procedure the results are, however, only asymptotically exact and thus MCS often also needs to be performed. Here a scaling property inherent in the FORM procedure is investigated for use in MCS in order to reduce the necessary simulation time. More specifically, the MCS results for the reliability index β for parametric rolling of a ship suggest that the relation \(\beta = a + b/{H}_{\mathrm{s}}\) can provide an accurate scaling of the reliability index with significant wave height Hs. MCS can therefore be performed for sea states higher than the design sea state and thereafter be scaled down. From the reliability index the mean out-crossing rate and the probability of exceedance are then readily obtained.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The roll motion of ships can lead to various types of failures ranging from seasickness over cargo shift and loss of containers to capsize of the vessel. Hence, it is important to minimize the roll motion during a voyage. Currently, on-board decision support systems, e.g., [32, 28, 35], are being installed in vessels with the aim to provide the officer on watch with guidance on the best possible route, taking into account the weather forecast, the time constraints for the voyage and limiting criteria for motions etc.
A main problem is real-time estimation of the sea state. Here two approaches are being tested in full scale. The first is based on the use of a wave radar, e.g., the WAVEX system, e.g., [3], and the second uses ship responses (e.g. motions, accelerations, and strains) measured real-time by sensors installed on board together with linear transfer functions to estimate the sea state, e.g., [29], where also a comparison between the two approaches can be found.
After estimation of the sea state, a real-time estimation of the maximum ship responses within the next few hours as function of ship speed and course is needed to guide the officer on the action to take if excessive responses are foreseen with the present course and speed. To linear responses the standard frequency domain approach using transfer functions can easily be applied. For nonlinear responses most often time domain simulations are performed to obtain short-term statistics for the nonlinear roll response of ships, e.g., [23, 6, 34]. However, less time-consuming stochastic procedures have also been suggested. Most of them are based on simplifying, but often reasonable assumptions like equivalent linear damping, e.g., [4], second- or third-order perturbation procedures, e.g., [27], Melnikov functions, e.g., [13, 36] and moment closure techniques, [26]. More recently, different procedures based on identification of critical wave episodes related to the roll motion have been suggested, see [37, 19, 20]. The present note is largely based on [20] but deals only with prediction of parametric rolling in head sea leaving out forced rolling.
2 Roll Motion of a Ship
A very comprehensive discussion of intact stability, including parametric rolling can be found in the ITTC report on ship stability in waves, [15]. The report discusses various modes of failure and the prediction procedures available. The report is partly based on the result of a questionnaire distributed to a large number of organizations and thus reflects very well the current status. To cover all modes of failure (static loss of stability, parametric excitation, dynamic rolling, resonance excitation, and broaching) a general nonlinear 6-DOF time domain procedure including viscous effects and maneuvering models must be applied. Some codes, e.g., LAMP, [11] and [33], seem to be able to do so with reasonable accuracy, but are very time-consuming to run, restricting the application to regular waves or very short stochastic realizations.
Another nonlinear 6-DOF procedure is GL-SIMPEL, see e.g., [31], based on a nonlinear strip theory formulation. The frequency dependence of the added mass and damping is taken into account using a higher differential equation formulation. FREDYN, see e.g., [11], is another nonlinear code based on a strip theory formulation. Generally, these codes are much faster than nonlinear 3-D procedures like LAMP and, as the 3-D effects on the roll motion is usually not that important, to be preferred for design work and onboard decision support system.
Other procedures have more limiting capabilities as some of the capsize modes are excluded. An example is the ROLLS procedure, [24], where the following nonlinear differential equation is used to estimate the roll angle ϕ, (omitting the terms due to wind and fluids in tanks):
Here M ϕ, M sy, and M d are the roll moments due to waves, sway and yaw, and hydrodynamic damping, respectively. Furthermore, I xx and I xz are the mass moment of inertia about the longitudinal axis and the cross term mass moment of inertia. The displacement of the ship is denoted by Δ and g is the acceleration of gravity. The instantaneous value of the righting arm \(\overline{\mathrm{GZ}}\) is in irregular waves calculated approximately using the so-called Grim’s effective wave. The heave w, pitch θ, and yaw ψ motions are determined by standard strip theory formulations, whereas the surge motion is calculated from the incident wave pressure distribution. The advantage of this formulation compared to full nonlinear calculations is the much faster computational speed, still retaining a coupling between all six-degrees-of-freedom, [23]. The model can, however, not deal with broaching due to the assumption of a linear yaw motion. Both the ROLLS and the GL-SIMBEL procedures are described and validated in [14, IMO-SLF submission by Germany 2007].
Here a simplified version of (5.1) is considered. The heave motion w is taken to be a linear function of the wave elevation using the closed-form expression given by [16]. The cross term mass moment of inertia is assumed to be small, and pitch is thus only included through the static balancing of the vessel in waves in the calculation of the \(\overline{\mathrm{GZ}}\) curve. Furthermore, the sway and yaw motions can be ignored as only head sea is considered. The effect of speed variations due to the time varying added resistance in waves was investigated in [41], showing some reduction in the overall parametric roll behavior. Hence, the surge motion can be important, but will be omitted in the present treatment. The damping term M d is modeled by a standard combination of a linear, a quadratic and a cubic variation in the roll velocity. Finally, the wave excitation roll moment M ϕ is equal to zero in long-crested head sea. With these simplifications (5.1) reads
where r x is the roll radius of gyration. The roll frequency ωϕ is given by the metacentric height \({\overline{\mathrm{GM}}}_{\mathrm{sw}}\) in still water:
The instantaneous \(\overline{\mathrm{GZ}}\) curve in irregular waves is estimated from numerical results for a regular wave with a wave length equal to the length L of the vessel and a wave height equal to 0.05 L. These numerical results are fitted with analytical approximations of the form
where the wave crest position x c is measured relative to the aft end of the vessel. Similarly, the \(\overline{\mathrm{GZ}}\) curve in still water is fitted by:
The coefficients (A 1, A 3, A 5, C 0, C 1, C 3, C 5, D 0, D 1, D 3, D 5, L e) in (5.4)–(5.5) are found by the least square method. Other polynomial or Fourier series representations have been suggested, e.g., [36, 5], and generally a very good fit can be achieved for the range of roll angles of interest.
An alternative, albeit rather time-consuming, procedure to (5.4)–(5.5) is to calculate the instantaneous value of the righting arm by static balancing the ship in the instantaneous wave elevation, [41]. It was found that it did not change the results significantly compared to more simplified approaches including (5.4)–(5.5). Thus, (5.4)–(5.5) are assumed accurate enough for the present discussion focusing on effective stochastic procedures for estimation of the probability of occurrence of parametric roll.
In a stochastic seaway the following approximation to the instantaneous value of the righting arm \(\overline{\mathrm{GZ}}(t)\) is then:
The instantaneous wave height h(t) along the length of the vessel and the position of the crest x c in head sea are determined by an equivalent wave procedure somewhat similar to the one used by [24]:
Stationary sea conditions are assumed and specified by a JONSWAP wave spectrum with significant wave height H s and zero-crossing period T z. The frequency range is taken to be π ≤ ωT z ≤ 3π covering the main part of the JONSWAP spectrum.
The next step in the solution procedure is to account for the stochastic behavior of the sea. The straight forward procedure is to generate time series of random waves and use them as input to the ship motion code and then extract extreme values by simple counting and subsequent fitting to a proper extreme value distribution, e.g., the Gumbel distribution. This, however, requires long simulation time and also CPU time to get sufficient reliable results. A solution is to use cluster of computers. Other methods seek to identify the most probable wave episodes leading to a specified large roll angle. Spyrou and Themelis [37] describe such an approach in which a specific ship motion parameter, e.g., a large roll angle, is calculated for a range of wave heights, wave periods, and number of adjacent high waves. Thereafter, the probabilities of encountering these wave groups are determined and used to estimate the corresponding probability of exceeding the prescribed ship motion response. The feasibility of the method has been documented in [37] and [38] in the EU FP7 sponsored integrated project SAFEDOR.
A related procedure for calculation exceedance probabilities and associated critical wave episodes has been developed in [19] for parametric roll in head sea and extended in [20] to cover other types of roll motions. This procedure uses the First-Order Reliability Method (FORM) to determine the mean out-crossing rate of the ship response considered. The procedure also identifies a design point with a corresponding most probably wave episode leading to the prescribed response value. Thereby, the tedious task to identify critical wave episodes is done automatically by the procedure and the user (i.e., the designer) only has to select or program a proper time domain procedure able to model the ship response in question. All the statistical estimates are then done within a standard FORM. In the present treatment, the time domain simulation routine, (5.4), has been linked to the FORM software PROBAN [8]. It is clear that (5.2) has a rather limited accuracy, but anyway contains the main features needed to model parametric rolling. It is, however, straight forward to replace (5.2) with (5.1) or another more general time domain ship motion code.
Apart from the FORM results, which is only asymptotically correct for very low probability of occurrence, a very useful property can be derived from the FORM analysis, namely that the reliability index is strictly inversely proportional to the significant wave height. This observation can be used to accelerate MCS using artificially increased significant wave heights. These results can then afterwards be scaled down to the actual (real) wave height, resulting in several order of magnitudes reduction in simulation time.
In the following, the FORM procedure is first described in general terms and then results for a container ship are presented and compared with MCS using artificially increased wave heights.
3 First-Order Reliability Method Applied to Wave Loads
3.1 Design Point and Reliability Index
In FORM, the excitation or input process is a stationary stochastic process. Considering in general wave loads on marine structures, the input process is the wave elevation and the associated wave kinematics. For moderate sea states the wave elevation can be considered as Gaussian distributed, whereas for severer wave conditions corrections for nonlinearities must be incorporated. Such corrections are discussed and accounted for by using a second-order wave theory in a FORM analysis of a jack-up platform [17]. In the present paper dealing with the roll motion of a ship, linear, long-crested waves are assumed and hence the normal distributed wave elevation H(X, t) as a function of space X and time t can be written as:
where the variables u i, \bar{u}i are statistical independent, standard normal distributed variables to be determined by the FORM procedure and with the deterministic coefficients given by:
where ωi and \({k}_{i} = {\omega }_{i}^{2}/g\) are the n discrete frequencies and wave numbers applied. Furthermore, S(ω) is the wave spectrum and the increment between the discrete frequencies. It is easily seen that the expected value E[H 2] = ∫S(ω)dω, thus the wave energy in the stationary sea is preserved. Short-crested waves could be incorporated, if needed, but require more unknown variables u i, \bar{u}i and thus a larger computational effort.
From the wave elevation, (5.8)–(5.9), and the associated wave kinematics, any nonlinear wave-induced response ϕ(t) of a marine structure can in principle be determined by a time domain analysis using a proper hydrodynamic model:
Each of these realizations represents the response for a possible wave scenario. In the present case the realization is the roll angle and the realization which exceeds a given threshold ϕ0 at time t = t 0 with the highest probability is sought. This problem can be formulated as a limit state problem, well-known within time-invariant reliability theory [7]:
An approximate solution can be obtained by using FORM. The limit state surface G is given in terms of the statistical independent, standard normal distributed variables u i, \bar{u}i, and hence determination of the design point u i ∗ , \bar{u}i ∗ , defined as the point on the failure surface G = 0 with the shortest distance to the origin, is rather straightforward. A linearization about this point replaces (5.11) with a hyper plane in 2n-space. The distance
from the hyper plane to the origin is denoted the FORM reliability index. The calculation of the design point u i ∗ , \bar{u}i ∗ and the associated value of βFORM can be performed by standard reliability codes, e.g., [8]. Alternatively, standard optimization codes using (5.12) as the objective function and (5.11) as the constraint can be applied.
The time integration in (5.11) must cover a sufficient time period {0, t 0} to avoid any influence on ϕ(t 0) of the initial conditions at t = 0, i.e., to be longer than the memory in the system. Proper values of t 0 would usually be 1–3 min, depending on the damping in the system. However, for bifurcation problems with low damping as e.g., parametric roll a larger transient period can be expected. To avoid repetition in the wave system and for accurate representation of typical wave spectra \(n = 25 - 50\) would thus be needed.
The deterministic wave profile:
can be considered as a design wave or a critical wave episode. It is the wave scenario with the highest probability of occurrence that leads to the exceedance of the specified response level ϕ0. For linear systems the result reduces to the standard Slepian model, see e.g., [25, 40, 1, 9]. The critical wave episode in itself is a useful result as it can be used as input in more elaborate time domain simulations to correct for assumptions made in the hydrodynamic code, (5.10), applied in the FORM calculations. Such a model correction factor approach can provide an effective tool of accounting for even very complicated nonlinear effects [10].
It should be noted that other definitions of design waves based on a suitable nonuniform distribution of phase angles have been applied, especially for experimental application in model basins. The selection of the phase angle distribution is, however, not obvious, see e.g., [2].
3.2 Mean Out-Crossing Rates and Exceedance Probabilities
The time-invariant peak distribution follows from the mean out-crossing rates. Within a FORM approximation the mean out-crossing rate can be written as follows [17]:
based on a general formula given by [22]. Thus, the mean out-crossing rate is expressed analytically in terms of the design point and the reliability index. For linear processes it reduces to the standard Rayleigh distribution. Often the gradient vector \(\left \{{\alpha }_{i}^{{_\ast}},\bar{{\alpha }}_{i}^{{_\ast}}\right \} = \left \{{u}_{i}^{{_\ast}},\bar{{u}}_{i}^{{_\ast}}\right \}/{\beta }_{\mathrm{FORM}}\) to the design point does not vary much with exceedance level ϕ0. This is so for e.g., parametric rolling, [19]. Hence, (5.14) reduces to
where ν0 can be viewed as an effective mean zero out-crossing rate. It value can be taken as the inverse of the roll period in calm water without notable error. Finally, on the assumption of statistically independent peaks and, hence, a Poisson distributed process, the number of exceedance of the level ϕ0 in a given time T can be calculated from the mean out-crossing rate ν(ϕ0):
The present procedure can be considered as an alternative to the random constrained simulation, see e.g., [9]. The present method has, however, the advantage that the number of time domain simulations is much smaller due to the very efficient optimization procedures within FORM, and that it does not require the curve-fitting of lines of constant probabilities needed in the other procedure. Furthermore, the present procedure does not rely on a mean wave conditional from a linear response and can hence be applied also to bifurcation types of problems like parametric roll.
For bifurcation type of problems the optimization procedure used in the FORM analysis must be chosen appropriately, i.e., of the nongradient type and here a circle step approach is used [8]. Furthermore, to facilitate the convergence of the optimization procedure, the limit state surface, (5.11), is replaced by a logarithm transformation:
where
Finally, an arbitrary starting point different from zero is used and a range monotonically increasing threshold values ϕ0 are applied in order to get convergence.
The FORM is significantly faster than direct MCS, but most often very accurate. In a study by [19] dealing exclusively with parametric rolling of ships in head sea the FORM approach was found to be two orders of magnitude faster than direct simulation for realistic exceedance levels and with results deviating less than 0.1 in the reliability index. However, a scaling property derived from the FORM procedure can be used to accelerate very effectively the MCS. This will be investigated later in this chapter.
4 Numerical Example
The same Panmax container ship as used in [20] is considered here. The pertinent data including the coefficients in (5.4) and (5.5) can be found in [20], but it is noted that the damping coefficients, β1–β3, are taken, quite arbitrarily, from a study considering a different vessel [5], and corresponds to about 0.05 in equivalent linear roll damping. The ship is sailing in head sea with a forward speed of 6 m/s.

Left: \(\overline{\mathrm{GZ}}\) curve in still water. Right: \(\overline{\mathrm{GZ}}\) curves in regular waves with wave length equal to the ship length L and a wave height equal to 0.05 L. Wave crest positions at x c = 0, 0.25 L, 0.5 L, 0.75 L, and 1.0 L [19]
In the following the roll angles are given in radians. The approximate \(\overline{\mathrm{GZ}}\) curves, (5.4)–(5.5) are accurate for roll angles up to 0.9 rad [18]. The \(\overline{\mathrm{GZ}}\) curves are shown in Fig. 5.1 and it is clear that a significant reduction in righting lever occurs when the wave crest moves from the aft perpendicular (AP) to 0.25 L forward of AP. This is quite typical for ships with fine hull forms like container ships.
By use of the closed-form expressions given in [16] for the heave w, all pertinent data for calculation of the roll angle as function of time is defined. In order to show that (5.2) can model parametric roll, calculations have been performed with a regular wave with an encounter frequency close to twice the roll frequency [19]. Two wave heights were used: one (3.65 m) where parametric roll is not triggered and one slightly higher (3.7 m) where parametric roll develops. The roll motions for the two wave heights are shown in Fig. 5.2. The onset of parametric roll and its saturation level are clearly noticed.

Parametric roll in a regular wave (solid line) and the roll response for a slightly smaller regular wave (dashed line) [19]
The regular wave height needed to trigger parametric roll is thus about 3.7 m for the present vessel. If the wave height is increased above this value, parametric roll develops faster and to a higher saturation level. These results are consistent with both model test results and numerical calculations using more elaborate hydrodynamic codes [11].
In the following, some results are shown for parametric roll motions in head sea in a stochastic seaway. More results can be found in [19], whereas results for other headings are given in [20]. A parameter study is included in [20] quantifying the sensitivity of the reliability index βFORM to the zero-crossing wave period T z and the forward speed V. Here it is only noted that the probability of parametric roll decreases if the speed is either lowered or increased for the present example.
The sea state has a significant wave height H s = 12 m and a zero-crossing wave period T z = 11. 7 s. The zero-crossing period is chosen such that parametric roll can be expected due to occurrence of encounter frequencies in the range of twice the roll frequency. Of course neither the encounter frequency nor the roll frequency is constant in irregular waves.
The time simulations are carried out from t = 0 to \(t = {t}_{0} = 300\,\mathrm{s}\) with a time step of 0.5 s. The effect of the initial condition (\(\phi (t = 0) = 0.01\) rad) is negligible after about 50 s, but in order to build up parametric roll a longer duration is needed. With n = 50 equidistant frequencies, the wave repetition period relative to the ship is about 400 s with a forward speed of 6 m/s.
4.1 Results by the First-Order Reliability Method
A detailed analysis using the present approach is given in [19]. As an example the most probable roll response and the associated critical wave episode, (5.13), corresponding to exceedance of a prescribed roll angle, i.e., ϕ0, of 0.5 rad, are shown in Fig. 5.3.

Left: Most probable roll response yielding ϕ0 = 0. 5 rad at t 0 = 300 s. Right: Corresponding critical wave episode [20]
The interesting observation is as stated in [19]:
“The critical wave episode is basically a sum of two contributions: firstly, a regular wave with encounter frequency close to twice the roll frequency and a wave height just triggering parametric roll and, secondly, a transient wave with magnitude depending on the prescribed roll response ϕ0”.
The last part resembles the critical wave episodes as obtained from quasi-static response analyzes, e.g., [1] and has basically the shape of the autocorrelation function. The first term, which is independent of the prescribed response level, is unique for parametric roll, but is needed to initiate parametric roll. After the peak in roll angle has been reached (i.e., for t > 300 s) the first part is seen to disappear. This is consistent with an unconditional mean wave equal to zero after \(t = {t}_{0} = 300\,\mathrm{s}\).
As the wave spectrum does not change shape with H s the critical wave episode, (5.13), becomes independent of H s. A change of H s by a factor μ will then just change the design point u i ∗ , \bar{u}i ∗ and hence βFORM by a factor 1/μ. This behavior has previously been noted by [39], based on a different argument, and is also mentioned and discussed in the [14, IMO-SLF submission by Germany 2007]. Clearly this property greatly facilitates the long-term convolution of the heeling angle, but is also useful in MCS as will be discussed below.
4.2 Results by Monte Carlo Simulations
The FORM solution is asymptotically correct, i.e., only strictly valid for very low probabilities of occurrence. Furthermore, the FORM solution does not always converge, most probably due to parametric rolling being a bifurcation type of problem. A comparison between FORM results and MCS has been made in [30]. Generally, fairly good agreement was found. However, if the simulation length, t 0 in (5.11), exceeded 600 s then the FORM solution did not converge using the present FORM code. This might constitute a problem in some cases as parametric rolling typically has a long transient run-in period due to the relative low roll damping.
The reliability index βFORM calculated by the FORM analysis is strictly inversely proportional to the square root of the intensity of the excitation spectrum irrespectively of the nonlinearity in the system as shown in [20] and [12]: Hence, for wave excitation in stationary stochastic sea based on the JONSWAP or the Pierson–Moskowitz spectrum, βFORM is always inversely proportional to the significant wave height as in a purely linear analysis:
If this property can be assumed valid also in the MCS the out-crossing rates can be increased with a corresponding reduction of the necessary length of the time domain simulations by using a larger significant wave height than relevant from a design point-of-view in the simulations. The reliability index and the corresponding mean out-crossing rate, (5.15), thus obtained can then afterwards be scaled down to the actual significant wave height. The accuracy of this approach has been investigated by [21] considering the overturning of a jack-up rig and the extreme wave bending moment in a ship as examples. It was found that a relation of the type \(\beta = a + b/{H}_{\mathrm{s}}\), where a and b are constants depending on the threshold level ϕ0, very accurately modeled the MCS results.
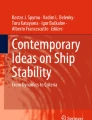
The example is the same as above except that the threshold roll angle is increased to ϕ0 = 0. 6 rad in order to lower the probability of occurrence and thereby increase the computational time for direct simulations. With a significant wave height H s = 12 m the reliability index was found in [19] to be βFORM = 3. 9047 whereas a MCS simulation for the same problem using 1,000,000 simulations resulted in a mean reliability index of 4.0208 with a 90% confidence interval of [3.9576, 4.1048] and a CoV = 0.186. The agreement is good with FORM being slightly on the conservative side, but there were two orders of magnitude in difference in the computational time between the FORM analysis and the MCS, so an improvement in the MCS is strongly needed. Therefore the MCS have now been performed again but with significant wave heights H s = 18 m, 24 m, 30 m and 40 m using a CoV = 0. 05 as stopping criteria. The results for the reliability index thus calculated are shown in Fig. 5.4 as function of 1/H s. Clearly, a relation of the type \(\beta = a + b/{H}_{\mathrm{s}}\) will provide a very accurate fit of the MCS results using the reliability index β at H s = 18 m, 24 m and/or 30 m as input. The result for H s = 40 m falls a little outside this fit in agreement with other studies [39, 21] showing that the linearity in the reliability index β with 1/H s usually only holds if β is greater than about 2.

Reliability index from First-Order Reliability Method (FORM) and Monte Carlo simulations (MCS) as function of 1 ∕ H s
It is noted that the simulation time for the results with the increased wave heights only are small fractions of what was needed in the simulation with H s = 12 m. More specifically, the number of simulations required to get results with the same CoV is inversely proportional to the corresponding probability of exceedance. Hence, if the values at H s = 30 m (β = 1. 8001) and H s = 24 m (β = 2. 1597) are used in the extrapolation scheme \(\beta = a + b/{H}_{\mathrm{s}}\), then the reduction in simulation time is about 300. However, if simulation results for H s = 10 m was requested then the extrapolation scheme will provide a four order of magnitude reduction in simulation time. Finally, it is noted that the FORM results seems to be asymptotically correct as expected, but also that the extrapolation scheme for the MCS does not need any input from a FORM analysis. Thus the two methods supplement each other rather nicely, providing accurate results for low and high values of the reliability index.
5 Conclusions
The Monte Carlo simulation (MCS) results presented for the reliability index β for parametric rolling of a ship suggest that the relation \(\beta = a + b/{H}_{\mathrm{s}}\) can provide an accurate scaling of the reliability index with significant wave height. This could be a useful procedure in case direct MCS for the design sea states are not feasible due to too long computational time.
It is also noted that the result from First-Order Reliability Method (FORM) is quite accurate, especially for high values of the reliability index.
From the reliability index the mean out-crossing rate and the probability of exceedance directly follow from (5.15) and (5.16).
References
Adegeest, L. J. M, Braathen, A. Løseth, R. M.: Use of non-linear sea-loads nimulations in design of ships. Proc. PRADS’1998, Delft, pp. 53–58 (1998)
Alford, K. A., Troesch, A. W., McCue, L.: LS design wave elevations leading to extreme roll motions. Proc. STAB’2005, Istanbul, Turkey (2005)
Borge, J., Gonzáles, R., Hessner, K., Reichert, K., Soares, C. G.: Estimation of sea state directional spectra by using marine radar imaging of sea surface. Proc. ETCE/OMAE2000 Joint Conference, New Orleans, Louisiana, USA (2000)
Bulian, G., Francescutto, A. A.: Simplified modular approach for the prediction of the roll motion due to the combined action of wind and waves. Proc Instn Enggrs, Part M: J. Engineering for the Maritime Environment 218:189–212 (2004)
Bulian, G.: Nonlinear parametric rolling in regular waves – a general procedure for the analytical approximation of the GZ curve and its use in time domain simulations. Ocean Engineering 32:309–330 (2005)
Daalen, E. F. G., Boonstra, H., Blok, J. J.: Capsize probability analysis of a small container vessel. Proc- 8th Int. Workshop on Stability and Operational Safety of Ships, Istanbul, October 6–7 (2005)
Der Kiureghian, A.: The geometry of random vibrations and solutions by FORM and SORM. Probabilistic Engineering Mechanics 15:81–90 (2000)
Det Norske Veritas: General purpose probabilistic analysis program, Version 4.4 (2003)
Dietz, J. S., Friis-Hansen, P., Jensen, J. J.: Most likely response waves for estimation of extreme value ship response statistics. Proc PRADS’2004, Travemünde, September, Germany (2004)
Ditlevsen, O., Arnbjerg-Nielsen, T.: Model-correction-factor method in structural reliability. Journal of Engineering 120:1–10 (1994)
France, W. N., Levadou, M., Treakle, T. W., Paulling, J. R., Michel, R. K., Moore, C.: An investigation of head-sea parametric rolling and its influence on container lashing systems. Marine Technology 40:1–19 (2003)
Fujimura, K., Der Kiureghian, A.: Tail-equivalent linearization method for nonlinear random vibration. Probabilistic Engineering Mechanics 22: 63–76 (2007)
Hsieh, S.-R., Troesch. A. W., Shaw, S. W.: A nonlinear probabilistic method for predicting vessel capsize in random beam seas. Proc Royal Society London, Part A, 446:195–211 (1994)
IMO submission (SLF 50) by Germany: Proposal for an additional intact stability regulations. Subcommittee on Stability, Loadlines and on Fishing Vessels (2007)
de Kat, J. O.: ITTC specialist committee on stability in waves (2005)
Jensen, J. J., Mansour, A. E., Olsen, A. S.: Estimation of ship motions using closed-form expressions. Ocean Engineering 31:61–85 (2004)
Jensen, J. J., Capul, J.: Extreme response predictions for jack-up units in second-order stochastic waves by FORM. Probabilistic Engineering Mechanics 21:330–337 (2006)
Jensen, J. J., Olsen, A. S.: On the assessment of parametric roll in random sea. Proc. World Maritime Technology Conference, London, 6–10 March (2006)
Jensen, J. J., Pedersen, P. T.: Critical wave episodes for assessment of parametric roll Proc. IMDC’06, Ann Arbor, May, pp. 399–411 (2006)
Jensen, J. J.: Efficient estimation of extreme non-linear roll motions using the first-order reliability method (FORM). J. Marine Science and Technology 12:191–202 (2007)
Jensen, J. J.: Extreme value predictions using Monte Carlo simulations with artificially increased load spectrum. Probabilistic Engineering Mechanics, 26:399–404 (2010)
Koo, H., Der Kiureghian, A., Fujimura, K.: Design point excitation for nonlinear random vibrations. Probabilistic Engineering Mechanics. 20:136–147 (2005)
Krüger, S., Hinrichs, R., Cramer, H.: Performance based approaches for the evaluation of intact stability problems. Proc. PRADS’2004, Travemünde, September, Germany (2004)
Kroeger, H.-P.: Roll Simulation von Schiffen im seegang. Schiffstechnik 33:187–216 (in German) (1986)
Lindgren, G.: Some properties of a normal process near a local maximum. Ann. Math. Stat. 41:1870–1883 (1970)
Ness, O. B., McHenry, G., Mathisen, J., Winterstein, S. R.: Nonlinear analysis of ship rolling in random beam waves. Proc. STAR Symposium on 21st Century Ship and Offshore Vessel Design, Production and Operation, April 12–15, pp. 49–66 (1989)
Neves, M. A. S., Rodriquez, C. A.: A coupled third-order model of roll parametric resonance. Proc Maritime Transportation and Exploitation of Ocean and Coastal Resources, pp. 243–253, Taylor and Francis, London, UK (2005)
Nielsen, J. K., Hald, N. H., Michelsen, J., Nielsen, U. D., Baatrup, J., Jensen, J. J., Petersen, E. S.: Seasense – real-time onboard decision Support. Proc. World Maritime Technology Conference, London, 6-10 March (2006)
Nielsen, U. D.: Estimations of on-site directional wave spectra from measured ship responses. Marine Structures 19:33–69 (2006)
Nielsen, U. D., Jensen, J. J.: Numerical simulations of the rolling of a ship in a stochastic sea – Evaluations by Use of MCS and FORM. Proc of 28th International Conference on Offshore Mechanics and Arctic Engineering (OMAE’09), Honolulu, USA, June, Paper No. 79765 (2009)
Pereira, R.: Simulation nichtlinearer Seegangslasten. Schiffstechnik 35:173-193 (in German) (1988)
Rathje, H.: Impact of Extreme Waves on Ship Design and Ship Operation. Proc Design & Operation for Abnormal Conditions, Royal Institution of Naval Architects, London, 26–27 January (2005)
Shin, Y. S., Belenky, V. L., Paulling, J. R., Weems, K. M., Lin, W. M.: Criteria for parametric roll of large container ships in head seas. Transactions of SNAME 112:14–47 (2004)
Spanos, D., Papanikolaou, A. A numerical simulation of a fishing vessel in parametric roll in head sea. Proc. 8th Int. Workshop on Stability and Operational Safety of Ships, Istanbul, October 6–7 (2005)
Spanos, D., Papanikolaou, A., Papatzanakis, G.: Risk-based onboard guidance to the master for avoiding dangerous seaways. 6th OSAKA Colloquium on Seakeeping and Stability of Ships, Osaka University, Japan, March 26–28 (2008)
Spyrou, K. J.: Designing against parametric instability in following seas. Ocean Engineering 26:625–653 (2000)
Spyrou, K., Themelis, N.: Development of probabilistic procedures and validation – Alternative 2: Capsize mode analysis. Deliverables D235, SAFEDOR-D-235-2006-11-9-NTUA–rev-1 (2006)
Themelis, N., Spyrou, K., Niotis, S.: Implementation and application of probabilistic Procedures. Deliverables D236, SAFEDOR-D-236-2007-06-15-NTUA–rev-1 (2007)
Tonguc, E., Söding, H.: Computing capsizing frequencies of ships in a seaway. Proc. 3rd Int. Conf. on Stability of Ships and Ocean Vehicles STAB’86, Gdansk (1986)
Tromans, P. S., Anaturk, A. R., Hagemeijer, P.: A New Model for the Kinematics of Large Ocean Waves - Application as a Design Wave. Proc 1st Offshore and Polar Engineering Conference (ISOPE), Vol. 3, pp. 64–71 (1991)
Vidic-Perunovic, J., Jensen, J. J.: Parametric roll due to instantaneous volumetric changes and speed variations. Ocean Engineering 36:891–899 (2009)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer Science+Business Media, LLC
About this chapter
Cite this chapter
Jensen, J.J. (2012). Probability of Parametric Roll in Random Seaways. In: Fossen, T., Nijmeijer, H. (eds) Parametric Resonance in Dynamical Systems. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-1043-0_5
Download citation
DOI: https://doi.org/10.1007/978-1-4614-1043-0_5
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-1042-3
Online ISBN: 978-1-4614-1043-0
eBook Packages: EngineeringEngineering (R0)