
Abstract
Scientific applications critically depend on the ITRF and impose the most stringent requirements on terrestrial reference frame accuracy and long-term stability. A recent US National Research Council report (Minster et al., Precise geodetic infrastructure: national requirements for a shared resource. The National Academies Press, Washington, DC, 2010) found that the applications demanding the highest accuracy and long-term stability were sea level, geodynamics from vertical land motion and large-scale horizontal deformation, and decadal satellite survey missions. A key recommendation was to make a long-term commitment to maintain the ITRF to ensure its continuity and stability, so as to provide a foundation for Earth system science and studies of global change. In this paper, we focus on characteristics of the ITRF that have demands placed upon them by these most stringent scientific users. We consider in detail each characteristic in terms of what the user needs, and provide examples of how such needs can be met, and identify factors that strengthen or weaken terrestrial reference frames from a user’s perspective. We find the most important feature of a terrestrial reference frame is “predictability”, the ability of the frame to predict future positions of stations in a multi-technique network to support science. Specifically, the key requirement of the ITRF, in order to support the most demanding scientific applications with large societal impacts, is to provide access to station coordinates that have secular predictability at the level of 1 mm per decade (0.1 mm/year).
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Given that the emphasis of this REFAG symposium is on how to improve and develop future versions of terrestrial reference frames (TRFs), it is of useful to consider requirements and desirable characteristics from the user’s perspective. Of all the users of TRFs, it is scientific users that place the most stringent demands on these characteristics (Blewitt et al. 2010; Plag and Pearlman 2009). In its report, the National Research Council in the United States discussed in detail the national requirements for precise geodetic infrastructure as a share resource (Minster et al. 2010). The report identifies the most stringent scientific applications, including the study of sea level change, geodynamics, orbit determination of decadal satellite missions, and vertical land motion. The report notes that the International Terrestrial Reference Frame (ITRF) enables coordinates from multiple techniques to be meaningfully compared anywhere on the Earth’s surface (Altamimi et al. 2011), and thus forms the basis of scientific investigations using the Global Geodetic Observing System (Plag and Pearlman 2009). The ITRF is also inherited by denser, continental-scale TRFs to support more targeted science (Blewitt et al. 2013; Brunini and Sánchez 2013; Bruyninx et al. 2012), thus the relationships between TRFs have a solid foundation through the ITRF.
One of most difficult problems that an accurate and stable ITRF addresses is how to tie together time series of global sea level change from different satellite altimeter missions (Nerem et al. 2010). The ITRF also addresses the problem of being able to reference tide gauge data with respect to a stable and physically meaningful origin, so that sea level can be mapped in a system consistent with altimetry, and can be compared from one decade to the next (Blewitt et al. 2010; Santamaría-Gómez et al. 2012). The interpretation of vertical land motion in terms of geodynamic processes also places stringent demands on coordinate accuracy and stability (Plag and Pearlman 2009). These processes include glacial isostatic adjustment, ice sheet mass variation, coastal subsidence, mountain growth, decade-scale hydrological loading, and elastic strain accumulation at plate boundaries. In many cases the requirements on the TRF to support these scientific applications also have societal implications, for example, the need for accurately referenced surface displacements to improve tsunami early warning systems around the Pacific Rim, the risk to infrastructure from coastal subsidence, and the depletion of water resources in central California (Amos et al. 2014).
In this paper, to consider the user’s perspective, we first categorize the TRF characteristics that have user demands, and then each of these characteristics are discussed in some detail. We then consider the most stringent application, which is the determination of long-term change in sea level, to learn how those characteristics are used to meet scientific goals. Finally, we infer the key requirements on ITRF to support geodynamics and climate change, and attempt to answer the question, “What is the primary mission of a terrestrial reference frame?”
2 Terrestrial Reference Frame Characteristics That Have User Demands
What is the primary mission of a terrestrial reference frame? Whatever the answer to this question may be, it should relate to meeting the user’s needs. We will keep this question in mind as we consider the desirable characteristics that a TRF should have to meet the needs of science, and we will attempt to answer it in the Sect. 4.
Let us first categorize the types of characteristics that may have user demands, and then we will look at these characteristics in some detail:
-
1.
the associated reference system;
-
2.
reference frame definition and inheritance;
-
3.
realization;
-
4.
spatial coverage;
-
5.
temporal coverage;
-
6.
quality; and
-
7.
life cycle.
2.1 The Associated Reference System
Terrestrial reference frames are specific realizations of terrestrial reference systems (IERS 2010). The associated reference system comprises fundamental constants, conventions, and models. To be useful scientifically, we must consider physical characteristics of the reference system. The following provide some examples, all of which are subjects of ongoing research in the geodetic community:
-
1.
The accurately predictable part of a station’s motion, for example, solid Earth tidal displacements, may be modeled at the observation level of data analysis. The unpredictable or less-accurately predictable parts may be the target of scientific investigation, for example, co/post-seismic displacements.
-
2.
The origin may be coincident with the entire Earth system center of mass (CM), which requires that the predictable part of the station motion model relating to mass redistribution such as ocean tides must consistently account for displacement of the Earth’s geometrical figure from CM, so called “geocenter motion”.
-
3.
Scale is specified by the conventional speed of light together with timing measurements of sufficient accuracy in a consistent relativistic framework. For satellite geodesy, the so-called near-Earth approximation of the general relativistic metric defined by the International Astronomical Union (IAU) suffices (unlike interplanetary missions, for example). Scale is a function of the adopted reference gravitational potential, such as a conventional geoid for an Earth-fixed observer, or the potential at Earth’s center of mass, or the solar system’s center of mass. Since different reference potentials may be more convenient to perform observation modeling, the scale of the reference system should be unambiguously defined, among the various possible choices (IERS 2010).
-
4.
The reference system must take care with any models that may affect scale, models that should be consistent with the conventional speed of light. Examples include GM, atmospheric refractivity, and system biases such as those associated with satellite reflectors andantennas.
-
5.
The rotation of the reference system is mathematically arbitrary and thus conventional, but to be useful to geophysicists, it should be defined to be consistent with some physical principle, such as the no-net rotation of the tectonic plates, or the rotation of hot spots representing the mantle, or the integrated surface motion of the Earth (Kreemer et al. 2006).
2.2 Reference Frame Definition and Inheritance
“Reference frame definition” is the method chosen to realize the origin, scale, and orientation of the TRF, and their time evolution. Examples are:
-
1.
Origin: One option is to use SLR for its superior orbit modeling and predictability, setting degree-1 gravity terms to zero.
-
2.
Scale: One option is to use VLBI, given its insensitivity to GM. Another option is to use SLR, given its less sensitivity to errors in atmospheric refractivity.
“Inheritance” is often used to ensure continuity and consistency of the TRF. Examples are:
-
1.
Maintain the same orientation as the former ITRF, so as to ensure continuity of polar motion time series and consistency in updated station coordinate time series.
-
2.
IGS08 is aligned with ITF2008 to ensure reference frame consistency, which improves precision for daily GPS orbit alignment in the terrestrial frame (Rebischung et al. 2012).
-
3.
Stable North America reference frame NA12 (Blewitt et al. 2013) was realized using time series in global reference frame IGS08 (Rebischung et al. 2012) to ensure reference frame consistency with ITRF2008 (Altamimi et al. 2011), while allowing for a different no-net rotation condition to meet scientific needs.
2.3 Realization
TRF realization extends the reference frame definition and inheritance by a self-consistent process that explicitly determines the coordinates of stations of each contributing technique. There are specific aspects of design in the process of TRF realization that may address user’s needs:
-
1.
The selection of space-geodetic techniques used to supply the input data and TRF stations allows for a synergistic combination, such that the TRF can better conform to the physical ideal expressed by the associated reference system. In addition, techniques such as GNSS densify the frame by orders of magnitude, facilitating user access to the frame. Thus, GNSS user solutions that use such a TRF become leveraged by SLR and VLBI (without the user having to explicitly use such data), and become more physically grounded for scientific interpretation.
-
2.
Multi-technique site collocations and local ties between the stations are required to enable a rigorous combination of techniques. The number, spatial distribution, and variety of techniques of collocated sites have an impact on the quality of the combination, and thus the ability of GNSS to gain leverage from VLBI and SLR.
-
3.
Relative data weights between contributing techniques, and between contributing solutions within each technique will have an impact on the quality of the combination, thus ongoing assessment is needed to determine the optimal relative weights that give the most physically meaningful and high-quality frame.
-
4.
The selection of TRF stations and time-windows of acceptable data can affect the quality and long-term stability of the origin, scale, and orientation of the frame. In particular, if a TRF station has non-stationary variation from linear motion (such as random walk monument noise, or post-seismic deformation), its future position will be less predictable, therefore degrading the quality of the frame. Stationary processes such as flicker noise and repeatable seasonality are of less concern as they do not affect long-term predictability, however they may affect relative data weights of contributing stations.
-
5.
The estimation of empirical station motion model parameters is required. For example, station velocities are required because secular motion from tectonics and plate boundary deformation is not sufficiently well known a priori. Moreover, GNSS time series generally suffer from discontinuities arising from equipment changes, and all techniques are generally prone to permanent displacements due to earthquakes. Note that from a user’s perspective, the estimated parameters define the realized frame. Estimated parameters are conditioned by the choice of the frame origin, orientation, scale, and their evolution in time, and in turn, the user has access to these frame parameters through alignment to the predicted station positions. At present, the ITRF estimated parameters for each station include coordinates at a conventional epoch, station velocity coordinates, step coordinates, and local tie discrepancies. Currently it is not possible to physically model seasonality with sufficient accuracy (Davis et al. 2012), therefore empirical parameters such as annual and semi-annual sine and cosine amplitudes are currently being considered to enhance the sub-annual realization of ITRF. Of particular concern is the out-of-phase seasonality of the northern and southern hemisphere, which currently may bias the sub-annual realization of scale and frame origin. For example, seasonal inter-hemispheric surface mass redistribution would lead to seasonal variation in hemispheric scale and mean station position (through degree-1 deformation). Hemispheric asymmetry in the station distribution could therefore lead to anomalous seasonal variation in scale and origin.
-
6.
Quality control (QC) is defined as the screening of input data, which in this case are the contributing geodetic solutions. Quality assessment (QA) is defined as the evaluation of the final product, which in this case are the estimated station motion parameters, and thus the realization of origin, scale, and orientation. The effectiveness of QC is of paramount importance to improve the quality of the final product. QA is a somewhat more difficult process, and a conservative approach can be valuable to put bounds on the physical interpretation in scientific investigations. For example, a QA determination that the origin drift is accurate to 0.5 mm/year (Altamimi et al. 2011) has important implications for conclusions that may be drawn on global sea level rise.
2.4 Spatial Coverage
Spatial coverage of a TRF has significant impact on the usefulness of a TRF to various users. Spatial coverage is important to consider at global, continental, regional and local scales. For example:
-
1.
Global coverage is required to accurately represent the physical Earth and its rotation, and is used for global-scale geodynamics (Plag and Pearlman 2009).
-
2.
Continental coverage is used for plate tectonics, and to tie national reference systems to ITRF (Blewitt et al. 2013; Brunini and Sánchez 2013; Bruyninx et al. 2012)
-
3.
Regional coverage is used to characterize plate boundary deformation.
-
4.
Local coverage, or “footprint”, is used to assess the local physical stability and monumentation of TRF stations (Minster et al. 2010).
-
5.
TRFs naturally have a “spatial domain of applicability” relating to the extent of their spatial coverage. On the one hand, ITRF has global extent, and so is applicable globally. On the other hand, NA12 should only be used in or near North America (Blewitt et al. 2013). For frames that are not global, the user’s geodetic solutions will generally degrade moving away from the region encompassed by the network.
-
6.
In addition to spatial extent, spatial sampling also has important consequences for scientific interpretation. Hemispheric asymmetry in the SLR global network can create systematic biases in the realization of the ITRF origin and scale. The frame can also be biased because of oversampling on specific continents. Assuming that spatially-correlated systematic errors exist in any contributing network solution, one might consider a scheme to de-weighting regions that are oversampled. In a sense, this is analogous to generating normal points, but in this case, in the spatial domain.
-
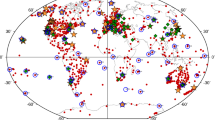
7.
Figure 1 shows the current spatial coverage for >12,000 geodetic GPS stations that are processed routinely by the Nevada Geodetic Laboratory (http://geodesy.unr.edu). The asymmetry of the distribution is strikingly obvious.
Fig. 1 
Spatial coverage for geodetic GPS stations routinely processed by the Nevada Geodetic Laboratory, http://geodesy.unr.edu

2.5 Temporal Coverage
Temporal coverage affects the quality of the frame with time. Some aspects of temporal coverage are important to consider from the user’s perspective:
-
1.
TRFs have a start date and an end date of contributing data. The predictability of TRF station coordinates degrade at least quadratically with time, even for the ideal case of a perfectly secular frame, and so rapidly degrade outside of this time window. Therefore it is imperative to update the TRF from time to time, typically every few years, depending on the time span of contributing data. As the time span increases with each subsequent frame realization, the frame can be updated less frequently. It should be noted, however, that a significant problem remains whenever a great earthquake displaces a significant region within the TRF. To resolve this problem, temporary fixes may be required in between significant TRF updates.
-
2.
Each station has a “time window of applicability” to the frame. At most, this window can include all possible data, from when the station began delivering data, to the general end date of all contributing data to the frame. However a common situation is that a station may only have linear behavior within a specific time window, because the station was in the region of a great earthquake, and is subject to post-seismic deformation. There could be time spans where a station was behaving poorly, perhaps because of failing equipment, or periods where there was snow and ice on an antenna. These windows of applicability need to be carefully specified to the user (Blewitt et al. 2013).
-
3.
That each station has a time window implies that at any given epoch, there will generally be a different subset of contributing stations to the frame. Indeed, the subset at the start time of the frame may not even overlap with the subset at the end time of the frame. This situation requires that there be significant times of overlap between stations such that the frame is stable as a function of time. This is a temporal analogue to struts within a spatial structure. Naturally, stations with longer time series and less steps (discontinuities) provide more stability to the frame, provided their station coordinates are accurately predictable (i.e., secular with stationary noise). This has implications on the stewardship of equipment at fundamental stations, which have multiple collocations. For example, it may not be a good idea to swap old GPS equipment for new GNSS equipment. Rather it might be better to install the GNSS equipment in addition to the old GPS equipment.
2.6 Quality
The quality of a TRF can be characterized in several ways. Some of the following concepts were articulated by the National Research Council report (Minster et al. 2010):
-
1.
Accuracy refers to how close a determined quantity is to the truth, and precision refers to how close the determination of a quantity can be repeated. Consistently high accuracy requires high precision.
-
2.
Reference frame accuracy and precision refers to the determination of scale, orientation, and origin of a frame. This aspect of quality is important for the study of geodynamics and climate change, particularly in the determination of vertical land motion and sea level rise. Note that some of these parameters may not be observable to a specific technique, for example, VLBI is insensitive to the Earth center of mass. GNSS techniques determine scale with extremely high precision, but have an unknown overall bias between the satellite center of mass and electrical phase center of the transmitter, which requires calibration by SLR. Orientation must be conventionally aligned for all systems, though GNSS techniques determine the position of the rotational pole with extremely high precision.
-
3.
Station coordinates themselves are, strictly speaking, not observable. However, it is useful to consider the concepts of “internal accuracy” and “internal precision,” which refer to the determination of coordinates within a given TRF. This internal aspect of quality is important to the scientific user who studies Earth deformation. A reasonable proxy for internal precision is the standard deviation in repeated estimation of station coordinates, though it should not be assumed that this scatter is constant in time and geographic location. Internal accuracy is more difficult to assess. A reasonable proxy for internal accuracy is the degree to which different techniques agree on station coordinates, though local ties confound this assessment. It should also be recalled that all techniques use the IERS conventions (IERS 2010), hence errors in those conventions may not be well assessed by looking at differences between solutions.
-
4.
Stability refers to predictability, that is the ability of the TRF to extrapolate station coordinates accurately into the future (and into the past, though with less application for space-based geodesy). Stability requires that the scale and origin have long-term accuracy and predictability. As a consequence, the best stability requires long-term linear behavior of the origin and scale. The useful lifetime of a TRF is related to its stability. Good stability is a result of having longer contributing time series, simple empirical station motion models (e.g., linear with few or no steps), and lots of overlap in time windows of applicability. Good stability also requires continuous monitoring of the TRF to detect and retire TRF stations that have poorly predicted positions, for example, some stations may have unstable monumentation, or may be subject to regional instability from hydrological effects, or may have step discontinuities due to earthquakes or changes of equipment. Users that absolutely depend on TRF stability include satellite altimeter missions to measure long-term change in sea level, and scientists studying acceleration of ice sheet melting in polar regions.
-
5.
Spatial heterogeneity of the probability distribution function (PDF) of coordinate accuracy can occur due to non-uniformity in TRF station distribution or source distribution. For example, GPS satellites do not pass near the celestial pole, hence vertical precision is weaker in polar regions. Oceans are poorly sampled compared to continents. As a result, certain hemispheres of the Earth are more poorly sampled, for example, the hemisphere centered on the Pacific Ocean. This leads to global asymmetry and geographic dependence in the level of errors in user’s positions. The comments previously made with regard to spatial coverage apply to this problem.
-
6.
Temporal heterogeneity of the PDF, or “heteroscedasticity”, is a common feature of geodetic time series, with data from earlier years having more scatter and bias than more recent data. This naturally arises because new techniques typically have growing networks in earlier years. However, the opposite can occur, where in older networks the number of stations can decrease in time, or where equipment ages and starts to generate more noisy data. Recent degradation is of particular concern for the SLR network contributing to the ITRF, as this would heavily impact TRF stability, discussed above. This is because data at both the start and end of a time series have more effective leverage in the determination of the secular trend and thus the prediction of future coordinates, which is so essential for climate change science. This raises the issue of long-term commitment to essential contributing techniques in the ITRF, particularly at multi-technique stations. In any case, care should be taken when realizing a TRF to properly account for heteroscedasticity. Formal error naturally takes into account number of stations, but will not take into account geographic systematic error that can occur when a long running station in a remote region fails and is not replaced. Nor does formal error account for time-dependent noise in the data, such as the seasonal variation in scatter that is seen in GNSS time series arising from seasonal tropospheric conditions, and increase in noise due to decreased signal to noise ration when antenna elements start to fail.
2.7 Life Cycle
Reference frames have to be upgraded from time to time. As a result, a TRF can be said to have a life cycle, which can be summarized by the following iterative process:
-
1.
User requirements demand a new TRF. This naturally occurs when the stability of the frame is approaching a critical point where accuracy no longer meets the user requirements. Or a new and fundamentally better frame may be demanded by new science.
-
2.
The reference system is upgraded. In particular, models of the observables, station motion, source structure, etc. are typically improved with time. New models are recommended to contributing analysis centers to facilitate consistency and incremental improvement in accuracy with each frame release (IERS 2010).
-
3.
The TRF is designed to best meet user requirements. For example, the end date of contributing data is specified. The list of contributing stations is reassessed based new criteria, and on the changing list of potential candidate stations. A new technique may be introduced into the ITRF combination, or how it contributes may be strengthened or relaxed. The way that the origin is realized may be revisted and a new method may be applied. The empirical station motion model may be expanded to include seasonal terms. A new scheme to determine relative weights of contributing solutions might be implemented (Altamimi et al. 2011).
-
4.
Contributing analysis centers reprocess data over a specified time span (e.g., Steigenberger et al. 2006). Ideally, the specified time span is the full history to improve predictability. However there may be mitigating circumstances in practice, for example, sparseness of observations and/or high levels of uncertainty in the quality of earlier solutions.
-
5.
The TRF is realized and published (Altamimi et al. 2011).
-
6.
The TRF is used. For best results, this requires users to reprocess all their data using the new recommended models of the upgraded TRF, and to apply transformations into the new frame.
-
7.
The TRF is inherited by new frames. For studies of tectonic plate boundary deformation and possible intra-plate deformation, scientific users often prefer to refer to a frame that is co-rotating with the stable interior of the plate, for example, the NA12 frame constructed by Blewitt et al. (2013). The first step in producing NA12 was to determine a frame aligned to ITRF with a much denser network in North America than in ITRF. The second step was to apply a rotation rate to the frame to minimize the apparent rotation of stations selected to represent the stable interior of North America. Other examples of inherited regional frames include SIRGAS in South America (Brunini and Sánchez 2013) and the EUREF Permanent Network in Europe (Bruyninx et al. 2012).
-
8.
The TRF degrades with time. Actually, frame degradation begins well before the last date of contributing data. This is because it is typical to impose a lower limit on the time span of contributing stations to the input solutions. For example, contributing stations to the NA12 frame must have a minimum of 5.5 years of continuous data (Blewitt et al. 2013). Given that the last date of contributing data is 2012.1, this means that the last contributing stations started to deliver data no later than 2006.6, which represents the time of maximum number of contributing stations. Since that time, stations are not added, and can only be removed because either dataflow stopped from the stations, or because its position is no longer predictable. This reduction of stations in time causes the frame to degrade in precision since 2006.6. Moreover, since 2012.1, the lack of any contributing data causes the stability to degrade quadratically in time. At some critical point in the future, the frame will degrade beyond the threshold of user requirements. Before this happens, we need to loop back to the top of this list, and again work our way through the previous item.
3 Scientific User Demands: The Example of Sea Level Rise
Satellite altimeter measurements from the Topex/Poseidon, Jason-1, and Jason-2 missions suggest that global mean sea level is over the last two decades now rising 1 mm/year faster than what tide gauges infer over the century prior to that (Nerem et al. 2010). This result depends critically on the quality of the TRF (Minster et al. 2010). Notably, the altimeter measurements derive from three different missions that have different time spans. Therefore to infer a recent secular rate using all three missions requires that the measurements of sea surface height be completely consistent.
Consider the following chain of dependency on the TRF (Blewitt et al. 2010). The satellite radars only measure the range between sea surface and the satellite. The satellite position at any time can be inferred by precision orbit determination using three techniques: GPS, DORIS, and SLR (Cerri et al. 2010). These positions must be accurate with respect to the Earth center of mass, and with respect to absolute scale as set by the conventional speed of light, hence the need for SLR and VLBI. Bias in the radar measurement is calibrated using buoys or tide gauges with positions determined by GPS with respect to the Earth center of mass at the origin of the TRF (Watson et al. 2015). Moreover, to infer sea level change from tide gauges with respect to the Earth center of mass requires monitoring vertical land motion at the tide gauge using GPS in the TRF, or some combination of nearby GPS and local leveling (Santamaría-Gómez et al. 2012).
Considering these dependencies tells us the user requirements of ITRF for this most stringently demanding application:
-
1.
ITRF must have continuity spanning all of the missions and going forth into the future, and must have sufficient coverage in the past to infer secular vertical land motion at tide gauges. Even then, there is the limitation that we cannot know for sure that vertical land motion has been linear prior to the space geodetic era.
-
2.
ITRF must be stable to interpret measurements made more recently than the last contributing data to ITRF.
-
3.
GPS, DORIS, SLR, and VLBI must contribute significantly to ITRF.
-
4.
Local ties at collocation sites between all ITRF contributing techniques must be accurate to exploit inter-technique synergy demanded of sea level change investigations.
-
5.
All techniques must have their data processed using IERS conventions consistent with ITRF.
-
6.
ITRF must accurately align its origin with the Earth system center of mass.
-
7.
ITRF must have a scale and origin that is accurate and stable in time.
-
8.
Frame degradation due to stations that recently lack predictable frame coordinates (such as due to equipment changes or earthquakes) must be monitored and mitigated to support current missions.
-
9.
Balanced, collocated coverage in time and geographic location is required to reduce spatio-temporal biases that can mimic decadal-scale variations in regional sea level.
-
10.
Systematic errors of techniques contributing to ITRF must be monitored (e.g., by intercomparison) and mitigated as well as possible, for example by appropriate relative weighting of the contributing solutions, or by using specific techniques to realize specific aspects of the ITRF (e.g., SLR for origin).
Ultimately, when answering the question as to whether sea level rise is really accelerating, all of the above points must be addressed with sufficient rigor to assess the statistical significance of the results. It should also be noted that improving the TRF is a minimum requirement, in that other errors associated with altimetry must also be addressed.
4 Conclusions
Scientific users place the most stringent demands on the TRF. Such users need to interpret physical vertical station motions and large-scale horizontal deformation. The most stringent application is the determination of long-term sea level change, vertical land motion, and multi-technique satellite orbit determination. Such applications need to access a physical origin and scale with high accuracy and stability, at the level of 1 mm/decade. By meeting such a requirement, we can meaningfully connect data from satellite altimeters to GNSS buoys for radar calibration, we can consistently determine vertical land motion in a global system, and we can meaningfully compare data from different satellite missions to infer secular variation over decades.
This brings us back to our original question: “What is the primary mission of the TRF?” Considering the most stringent application discussed above, the answer to this might be “predictability”. We primarily need the ability to predict accurately the coordinates of a multi-technique network of stations required by the user at any time needed, past, current, and future. To the most stringent users, this “predictability” defines the essence of a successful TRF.
References
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the international terrestrial reference frame. J Geod 85:457–473. doi:10.1007/s00190-011-0444-4
Amos C, Audet P, Hammond WC, Burgmann R, Johanson IA, Blewitt G (2014) Uplift and seismicity driven by groundwater depletion in central California. Nature 509:483–486. doi:10.1038/nature13275
Blewitt G, Altamimi Z, Davis JL, Gross R, Kuo C-Y, Lemoine FG, Moore AW, Neilan RE, Plag H-P, Rothacher M, Shum CK, Sideris MG, Schöne T, Tregoning P, Zerbini S (2010) Geodetic observations and global reference frame contributions to understanding sea-level rise and variability. In: Church J, Woodworth PL, Aarup T, Wilson S (eds) Understanding sea-level rise and variability. Wiley-Blackwell, Chichester, pp 256–284. ISBN 978-1-443-3451-7
Blewitt G, Kreemer C, Hammond WC, Goldfarb JM (2013) Terrestrial reference frame NA12 for crustal deformation studies in North America. J Geodyn 72:11–24. doi:10.1016/j.jog.2013.08.004
Brunini C, Sánchez L (2013) Geodetic reference frame for the Americas. GIM Int 27(3):26–31, ISSN: 1566–9076
Bruyninx C, Baire Q, Legrand J, Roosbeek (2012) The EUREF permenant network (EPN): recent developments and key issues. Proceedings of the EUREF 2011 symposium. http://www.epncb.oma.be/_documentation/papers/
Cerri L, Berthias JP, Bertiger WI, Haines BJH, Lemoine FG, Mercier F, Ries JC, Willis P (2010) Precision orbit determination standards for the Jason series of altimeter missions. Mar Geod 33:379–418. doi:10.1080/01490419.2010.488966
IERS Conventions (2010) In: Petit G, Luzum B (eds) IERS Technical note: 36. Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, p 179. ISBN 3-89888-989-6
Davis JL, Wernicke B, Tamisea M (2012) On seasonal signals in geodetic time series. J Geophys Res 117:1403. doi:10.1029/2011JB008690
Kreemer C, Lavallée DA, Blewitt G, Holt WE (2006) On the stability of a geodetic no-net-rotation frame and its implication for the international terrestrial reference frame. Geophys Res Lett 33(17). doi:10.1029/2006GL027058
Minster JB, Altamimi Z, Blewitt G, Carter WE, Cazenave A, Dragert H, Herring TA, Larson KM, Ries JC, Sandwell DT, Wahr JM, Davis JL (2010) Precise geodetic infrastructure: national requirements for a shared resource. The National Academies Press, Washington, DC, p 142. ISBN 10-309-15811-7
Nerem RS, Chambers DP, Choe C, Mitchum GT (2010) Estimating mean sea level change from the TOPEX and Jason altimeter missions. Mar Geod 33(S1):435–446. doi:10.1080/01490419.2010.491031
Plag H-P, Pearlman M (2009) Global geodetic observing system. Springer, Berlin
Rebischung P, Griffiths J, Ray J, Schmid R, Collilieux X, Garayt B (2012) IGS08: the IGS realization of ITRF2008. GPS Solutions 16:483–494. doi:10.1007/s10291-011-0248-2
Santamaría-Gómez Á, Gravelle M, Collilieux X, Guichard M, Martin Miguez B, Tiphaneu P, Woppelmann G (2012) Mitigating the effects of vertical land motion in tide gauge records using a state-of-the-art GPS velocity field. Global Planet Change 98–99:6–17. doi:10.1016/j.gloplacha.2012.07.007
Steigenberger P, Rothacher M, Dietrich R, Fritsche M, Rülke A, Vey S (2006) Reprocessing of a global GPS network. J Geophys Res 111(B5). doi:10.1029/2005JB003747
Watson CS, White NJ, Church JA, King MA, Burgette RJ, Legresy B (2015) Unabated global mean sea-level rise over the satellite altimeter era. Nat Clim Change Lett. doi:10.1038/nclimate2635
Acknowledgments
I am grateful for the careful reviews of Zuheir Altimimi and two anonymous reviewers, who have helped to improve the manuscript. This research was supported by NASA grants NNX12AK26G, NASA subaward 1551941 through the University of Colorado, and NSF grant EAR-1252210.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Blewitt, G. (2015). Terrestrial Reference Frame Requirements for Studies of Geodynamics and Climate Change. In: van Dam, T. (eds) REFAG 2014. International Association of Geodesy Symposia, vol 146. Springer, Cham. https://doi.org/10.1007/1345_2015_142
Download citation
DOI: https://doi.org/10.1007/1345_2015_142
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45628-7
Online ISBN: 978-3-319-45629-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)