
Abstract
We review the progress and continuous improvements being made since more than 30 years in the determination and development of the International Terrestrial Reference Frame (ITRF). We present the modeling innovations introduced in the ITRF2014 elaboration, mainly (1) the estimation of the annual and semi-annual signals embedded in the time series of station coordinates provided by the four space geodesy techniques, and (2) the incorporation of post-seismic deformation (PSD) models for sites subject to major earthquakes. We recall the rank deficiency problem in the ITRF combination model that is related to the specification of the ITRF defining parameters. We evaluate the precision and accuracy of the main ITRF2014 geodetic and geophysical products using some key performance indicators. We address some scientific questions of space geodesy contribution, via ITRF2014 results, to understand geophysical processes that affect the Earth system, such as earthquake displacements, tectonic motions and loading effects. We evaluate in particular the performance of estimating periodic signals versus applying a non-tidal atmospheric loading model. A particular emphasis is devoted to the level of agreement between techniques in terms of seasonal signals, frame physical parameters (origin and scale) and consistency with terrestrial local ties at co-location sites. Main conclusions are then drawn to guide and improve our analysis and combination strategy for future ITRF developments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
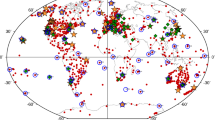
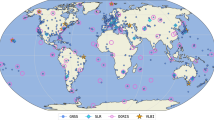
By integrating the strengths and mitigating the systematic errors of the four space geodetic techniques, the International Terrestrial Reference Frame (ITRF) is intended to be the standard reference in Earth science and operational geodesy applications (IUGG General Assembly resolution, Perugia 2007). The space geodetic techniques that contribute to the ITRF implementation are Doppler Orbitography Radiopositioning Integrated by Satellite (DORIS), Global Navigation Satellite Systems (GNSS), Satellite Laser Ranging (SLR), and Very Long Baseline Interferometry (VLBI). These techniques are organized as scientific services within the International Association of Geodesy (IAG) and known by the International Earth Rotation and Reference Systems (IERS) as Technique Centers (TCs): the International DORIS Service (IDS) (Willis et al. 2010), the International GNSS Service, formerly the International GPS Service (IGS) (Dow et al. 2009), the International Laser Ranging Service (ILRS) (Pearlman et al. 2002), and the International VLBI Service (IVS) (Schuh and Behrend 2012).
As none of the four space geodetic techniques is able to provide the full reference frame defining parameters, the ITRF is demonstrated to be the most accurate reference frame available today. Its origin is realized through SLR data, its scale by SLR and VLBI, and its orientation is maintained to be the same for the successive ITRF releases.
Thirteen ITRF versions were determined so far, starting with the ITRF88 published on the occasion of the creation of the International Earth Rotation and Reference Systems Service (IERS) in 1988, taking over the role of the Bureau International de l’Heure (BIH), and ending with the ITRF2014 published in January 2016. The history of the ITRF goes back more than 30 years ago when the first reference frame based on space geodesy data was published and called BIH Terrestrial Reference System 84 (BTS84) (Boucher and Altamimi 1985). Continuous improvements have since then been made in the ITRF determination, for both the combination strategy and the physical model enhancement (Altamimi et al. 2002, 2007, 2012, 2016). The ITRF2014 in particular was the occasion to precisely model the nonlinear station motions, namely the seasonal signals embedded in the station position time series and the Post-Seismic Deformations (PSD) for sites that were subject to major earthquakes.
The full development, description, and results of the ITRF2014 are published in Altamimi et al. (2016). For the purpose of this article, a certain number of already published features are recalled or/and expanded, as complementary details for the benefit of the reader. The following sections are developed in the context of the ITRF2014 elaboration:
2 ITRF implementation and the rank deficiency problem
2.1 General combination model
The current ITRF input data are times series of daily (24-h session-wise for VLBI) and weekly solutions of station positions and daily Earth Orientation Parameters (EOPs).
The ITRF construction is a two-step procedure: (1) stacking (accumulating) the time series of the four-technique solutions to generate long-term cumulative solutions of station positions and velocities, and EOPs, and (2) combining the resulting stacked solutions together with local ties at co-location sites.
The ITRF combination model involves a 14-parameter similarity transformation formula that offers different choices for the definition of the combined reference frame, which is in fact linked to the rank deficiency of the normal equation system that is built. The physical model used in the ITRF combination links the input and output data that both include station positions at a given epoch, station velocities, and Earth Orientation Parameters (EOPs). The general combination model is written as follows:
where for each point \( i \), \( X_{s}^{i} \) (at epoch \( t_{s}^{i} \)), and \( \dot{X}_{s}^{i} \) are positions and velocities of technique solution s and \( X_{c}^{i} \) (at epoch \( t_{0} \)) and \( \dot{X}_{c}^{i} \) are those of the combined solution c. For each individual frame k, as implicitly defined by solution s, \( D_{k} \) is the scale factor, \( T_{k} \) is the translation vector, and \( R_{k} \) is the rotation matrix. The dotted parameters designate their derivatives with respect to time. The translation vector \( T_{k} \) is composed of three origin components, namely T x , T y , T z , and the rotation matrix of three small rotation parameters, \( R_{x} \), \( R_{y} \), and \( R_{z} \), following the three axes, respectively, X, Y, and Z. \( t_{k} \) is a conventionally selected epoch for the seven transformation parameters. In addition to the first four lines of Eq. (1) involving station positions (and velocities), the EOPs are included via the six last lines of the same equation, making use of pole coordinates \( x_{s}^{p} \), \( y_{s}^{p} \) and universal time \( UT_{s} \) as well as their daily rates \( \dot{x}_{s}^{p} \), \( \dot{y}_{s}^{p} \) s and \( LOD_{s} \), where \( f \) = 1.002737909350795 is the conversion factor from UT into sidereal time. The link between the combined frame and the EOPs is ensured via the three rotation parameters appearing in the first three lines of Eq. (1). Note that Eq. (1) uses the linearized form of the general similarity transformation formula, neglecting the second- and higher-order terms (Petit and Luzum 2010, chap. 4; Altamimi and Dermanis 2012).
Because the ITRF combination model includes the similarity transformation parameters as unknowns, the constructed normal equation is singular and has 14 degrees of freedom (or rank deficiencies). In fact the number of rank deficiencies corresponds exactly to the number of parameters of the combined frame that need to be specified. There are several ways to handle the rank deficiency (or equivalently the definition of the parameters of the combined frame). The most popular, but clean, methods are those that are derived from the concept of minimum constraints, which are of the following form (Dermanis 2003):
where the columns of the operator \( E \) form a basis of the null space of the normal matrix, and \( X \) is the vector of linearized unknown parameters.
We derive a constraint equation that differs from this formulation by multiplying it by an invertible squared matrix so that the rank deficiency is also solved. To derive this constraint, the parameters of a 7-parameter similarity transformation between estimated coordinates and an external frame are constrained to be zero through the following equation:
where \( A \) is the well-known design matrix of partial derivatives of the similarity transformation, and \( X_{E} \) and \( X_{R} \) are the estimated and the reference solutions of station positions and velocities, respectively. Equation (3) has the property of aligning the estimated solution \( X_{E} \) to the external reference solution \( X_{R} \) without altering its internal features. The use of \( (A^{T} A)^{ - 1} A^{T} \) allows the covariance matrix of the output frame to reflect uncertainty associated with this constraint. The alignment of \( X_{E} \) to \( X_{R} \) is operated following the chosen frame defining parameters, and, therefore, the design matrix \( A \), or preferably the matrix \( (A^{T} A)^{ - 1} A^{T} \) should be reduced to the rows and columns of the chosen parameters (origin, scale, and/or orientation parameters).
Another type of minimum constraints, called internal constraints, was introduced by Altamimi et al. (2007). Internal constraints allow specifying the defining parameters of a combined frame that results from the stacking of time series of station coordinates. The internal constraints are applied to the time series of the seven (or of a subset of) transformation parameters: the slope and offset of each transformation parameter time series are constrained to be zero (Altamimi et al. 2007).
2.2 Periodic signals
In addition to station positions, station velocities and EOPs, described by Eq. (1), the ITRF2014 combination model includes also the periodic terms present in station position time series, modeled as sinusoidal functions. The general equation used for the estimation of these periodic signals is, for a given station,
where \( \Delta X_{f} \) is the total sum of the contributions of all periodic signals considered, \( n_{f} \) is the number of frequencies, \( \omega_{i} = \frac{2\pi }{{\tau_{i} }} \), where \( \tau_{i} \) is the ith period frequency, e.g., annual, semi-annual, etc. Each frequency adds six unknown parameters per station, i.e., \( (a_{x}^{i} , a_{y}^{i} , a_{z}^{i} , b_{x}^{i} , b_{y}^{i} , b_{z}^{i} )^{T} \), in addition to the six position and velocity parameters. The reader can refer to the full ITRF2014 article (Altamimi 2016), for more details.
When stacking the time series of station positions, each frequency introduces 14 singularities in the normal equation system (7 for parameters \( \varvec{a} \) and 7 for parameter \( \varvec{b} \)) that need to be specified. In other words, we need to separate the seasonal variations in the time series of the transformation parameters from the seasonal variations of the station positions. We use the internal constraint approach for the origin and the scale, by constraining to zero the periodic signal present in the time series of the corresponding parameters, \( \left[ {P\left( {t_{1} } \right), \ldots ,P\left( {t_{k} } \right)} \right] \). The internal constraint equation takes the following form:
where \( K \) is the number of the individual daily or weekly solutions and \( B \) is the matrix of partial derivatives given by
For the rotation parameters, we use the minimum constraint approach by imposing no net periodic rotation conditions on a set of well and homogeneously distributed reference stations, using
where A is the well-known design matrix of partial derivatives of the seven transformation parameters and \( \left( {a_{xR}^{i} ,a_{yR}^{i} ,a_{zR}^{i} ,b_{xR}^{i} ,b_{xR}^{i} ,b_{xR}^{i} } \right) \) are the reference values for each frequency \( i \) that can be taken from an external loading model or as zeros as it was done in the ITRF2014 analysis (Altamimi et al. 2016).
2.3 Post-seismic deformations (PSD)
In order to model the nonlinear behavior of station trajectories that are subject to major earthquakes, we fitted parametric models to the ITRF2014 input time series of GNSS station positions, before their stacking. The four retained parametric models are (1) (Log)arithmic, (2) (Exp)onential, (3) Log + Exp, and (4) Exp + Exp. We used the IGS contributed daily time series to fit parametric models for stations where PSD was judged visually significant, including a few stations impacted by major earthquakes that occurred prior to the start of their observations. The PSD models were fitted separately in each East, North, and Up component, simultaneously with piecewise linear functions (taking into account all possible discontinuities), annual, and semi-annual signals.
The adjustment of the parametric model coefficients did not involve any type of constraints, as they are considered as frame-independent parameters since they do not concern all stations. We then applied the corrections predicted by the GNSS-derived models to the nearby stations of the three other techniques at co-location sites, before stacking their respective time series (Altamimi et al. 2016).
The coefficients of the fitted parametric models are available at the ITRF2014 website: http://itrf.ign.fr/ITRF_solutions/2014/, together with some Fortran routines which compute the PSD corrections and their associated uncertainties.
2.4 Lessons learned from ITRF2014 and conclusions
2.4.1 Accuracy of ITRF2014 origin and scale
The accuracy of the ITRF origin and scale and their time evolution are of critical importance when using the ITRF in Earth science applications. As we use data from only one technique to define the ITRF origin, Satellite Laser Ranging, only an internal assessment can be made to evaluate the origin temporal stability among the successive ITRF solutions. The agreement between ITRF2014 and ITRF2008 over the three origin components and their time evolution is at the level of (or better than) 3 mm at epoch 2010.0 and 0.1 mm/year, respectively. With 5 years of more SLR data used in the ITRF2014, compared with ITRF2008, these results are an indication of the intrinsic origin stability, which is at the level of 5 mm over the full timespan (1993.0 onward) of SLR data used to define the ITRF2014 origin.
The ITRF2014 results have confirmed the persistent scale offset between the SLR and VLBI cumulative long-term solutions, namely 1.37 (± 0.10) ppb at epoch 2010.0 and 0.02 (± 0.02) ppb/yr. Defining the ITRF2014 scale to be the arithmetic average of the intrinsic scales of SLR and VLBI minimizes the scale impact for these two techniques when using the ITRF2014 products. These results point towards some remaining systematic modeling errors in both techniques, such as SLR range biases (Appleby et al. 2016) and probably VLBI antenna gravity deformations (Sarti et al. 2009, 2010).
2.4.2 Performance of ITRF2014 estimated periodic signals
The annual and semi-annual signals present in most time series of station positions of the four techniques were estimated in the first step of the ITRF2014 construction, i.e., separately for each individual technique. The main purpose of estimating these signals was to derive more precise and reliable station velocities, especially for stations with large seasonal signals. The seasonal signals at co-location sites were, however, not combined with each other, since we noticed large discrepancies between techniques that need to be carefully investigated in future work. Indeed, as pointed out by Collilieux et al. (2017), seasonal signals at co-location sites can only be combined meaningfully if they are similar, in terms of a similarity transformation.
As discussed in Altamimi et al. (2016), estimating the annual and semi-annual signals performs better than applying a non-tidal atmospheric loading model (provided by Tonie van Dam, personal communication 2015) for 84, 75, and 59% of the stations, in the North, East, and Up components, respectively. This indicates that there are likely some short-term variations that are not well captured by the annual and semi-annual estimated terms. Therefore, we might consider in future ITRF releases applying both a loading model and estimating seasonal terms.
2.4.3 Performance of the estimated post-seismic deformation models
Among a total of 117 ITRF2014 sites that were significantly impacted by 59 major earthquakes, 10 are GNSS-SLR, 13 are GNSS-VLBI, and 7 are GNSS-DORIS co-location sites. We verified at all these co-location sites that the GNSS-derived parametric models were accurately describing the trajectories of the nearby co-located stations from the three other techniques. In order to illustrate this aspect, Fig. 1 shows the trajectory of Concepcion (Chile) site where the GNSS-derived parametric model (using an exponential function, logarithmic plus exponential functions, and piece-wise linear functions, for North, East and Up components, respectively) accurately follows not only the GNSS, but also the VLBI time series.

Trajectory of Concepcion site before and after the 2010 Chile earthquake: GNSS marker (left) and VLBI antenna reference point (right). In blue: raw data; in green: the piecewise linear trajectories given by the ITRF2014 coordinates; in red: the trajectories obtained when adding the parametric PSD model (color figure online)
3 Conclusion
The ITRF2014 was the occasion to construct an ITRF solution with an improved accuracy and robustness, by adequately modeling nonlinear station motions: annual and semi-annual signals, as well as the post-seismic deformations for sites that were subject to major earthquakes.
We showed in Altamimi et al. (2016) that estimating the annual and semi-annual signals has statistically no impact on the horizontal station velocities, while the vertical station velocities may change by up to 1 mm/yr for sites with large seasonal signals, multiple number of discontinuities, or/and data gaps in their time series. Estimating these periodic terms helps the identification and detection of discontinuities in the times series and performs better than applying an atmospheric loading model, especially in the horizontal components.
Modeling the post-seismic deformations for sites impacted by major earthquakes allows the user to have access to the effective site trajectory during the relaxation period. The GNSS-derived parametric models were shown to precisely fit the time series of the co-located DORIS, SLR or VLBI instruments.
Based on the ITRF2014 results we can state that in average, the accuracy of the origin determination is at the level of 3 mm over the time span of the involved SLR observation (1993.0 onward). The persistent scale offset between SLR and VLBI is still around 1.4 ppb, equivalent to approximately 1 cm at the Earth’s surface.
Improving the geodetic infrastructure, mitigating and reducing the impact of technique systematic errors are the main areas of investigation for the enhancement of future solutions of the ITRF and the accuracy of its defining parameters.
References
Altamimi Z, Sillard P, Boucher C (2002) ITRF2000: a new release of the International Terrestrial Reference Frame for earth science applications. J Geophys Res Solid Earth 107(B10):2214. https://doi.org/10.1029/2001JB000561
Altamimi Z, Collilieux X, Legrand J, Garayt B, Boucher C (2007) ITRF2005: A new release of the International Terrestrial Reference Frame based on time series of station positions and Earth Orientation Parameters. J Geophys Res Solid Earth 112:B09401. https://doi.org/10.1029/2007JB004949
Altamimi Z, Métivier L, Collilieux X (2012) ITRF2008 Plate motion model. J Geophys Res 117:B07402. https://doi.org/10.1029/2011JB008930
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. Solid Earth, J Geophys Res. https://doi.org/10.1002/2016JB013098
Appleby G, Rodriguez R, Altamimi Z (2016) Assessment of the accuracy of global geodetic satellite laser ranging observations and estimated impact on ITRF scale: estimation of systematic errors in LAGEOS observations 1993–2014. J Geodesy. https://doi.org/10.1007/s00190-016-0929-2
Boucher C, Altamimi Z (1985) Towards an improved realization of the BIH Terrestrial Frame. In: Mueller II (ed) Proceedings of the international conference on Earth rotation and reference frames, MERIT/COTES Report, vol 2, Ohio State University, Columbus, OH, USA
Collilieux X, Altamimi Z, Rebischung P, Métivier L (2017) Coordinate kinematic models in the International Terrestrial Reference Frame releases. In: Honorary Volume of A. Dermanis, Department of Geodesy and Surveying, Faculty of Rural and Surveying Engineering, Aristotle University, Thessaloniki, Greece
Dermanis A (2003) The rank deficiency in estimation theory and the definition of reference frames. In: Sansò F (ed) 2003: V Hotine-Marussi Symposium on Mathematical Geodesy, Matera, Italy June 17–21, 2003. International Association of Geodesy Symposia 127:145–156. Springer, Heidelberg
Dow J, Neilan RE, Rizos C (2009) The International GNSS Service in a changing landscape of global navigation satellite systems. J Geod 83(3–4):191–198. https://doi.org/10.1007/s00190-008-0300-3
Pearlman MR, Degnan JJ, Bosworth JM (2002) The international laser ranging service. Adv Space Res 30(2):135–143
Petit G, Luzum B (2010) IERS conventions 2010, IERS Technical Note No. 36. Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main, Germany, p 179. ISBN 3-89888-989-6
Sarti P, Abbondanza C, Vittuari L (2009) Gravity-dependent signal path variation in a large VLBI telescope modelled with a combination of surveying methods. J Geod 83(11):1115–1126. https://doi.org/10.1007/s00190-009-0331-4
Sarti P, Abbondanza C, Petrov L, Negusini M (2010) Height bias and scale effect induced by antenna gravity deformations in geodetic VLBI data analysis. J Geod. https://doi.org/10.1007/s00190-010-0410-6
Schuh H, Behrend D (2012) VLBI: a fascinating technique for geodesy and astrometry. J Geodyn 61:68–80. https://doi.org/10.1016/j.jog.2012.07.007
Willis P, Fagard H, Ferrage P, Lemoine FG, Noll CE, Noomen R, Otten M, Ries JC, Rothacher M, Soudarin L, Tavernier G, Valette JJ (2010) The international DORIS service, toward maturity. In: Willis P (ed) DORIS: Scientific applications in geodesy and geodynamics. Advances in space research, vol 45, issue 12, pp 1408–1420. https://doi.org/10.1016/j.asr.2009.11.018
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Altamimi, Z., Rebischung, P., Métivier, L. et al. The International Terrestrial Reference Frame: lessons from ITRF2014. Rend. Fis. Acc. Lincei 29 (Suppl 1), 23–28 (2018). https://doi.org/10.1007/s12210-017-0660-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12210-017-0660-9