
Abstract
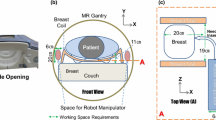
The aim of this work is to evaluate a robotic system for remote performance of minimally invasive procedures with real-time magnetic resonance imaging (MRI) guidance inside clinical cylindrical scanners. In these studies, the operator had no physical access to the subject and used MR images and video from the observation camera in the scanner to control the robot. The control software allowed manual and semi-automated control modes and included components for collision avoidance, with the subject or the gantry of the scanner, and on-the-fly adjustment of the MR imagine plane to visualize the procedure. Studies were performed initially on phantoms and lastly on a pig inside a standard clinical cylindrical 1.5 Tesla MR scanner.
Chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
JF Debatin-G. Adam, editor. Interventional Magnetic Resonance Imaging: Springer; 1998.
Jolesz F, Kahn T, Lufkin R. Genesis of interventional MRI. J Magn Reson Imaging 1998;8(1):2.
Masamune K, Kobayashi E, Masutani Y, Suzuki M, Dohi T, Iseki H, Takakura K. Development of an MRI-compatible needle insertion manipulator for stereotactic neurosurgery. J Image Guid Surg 1995;1(4):242–248.
Kaiser WA, Fischer H, Vagner J, Selig M. Robotic system for biopsy and therapy of breast lesions in a high-field whole-body magnetic resonance tomography unit. Invest Radiol 2000;35(8):513–519.
Felden A, Vagner J, Hinz A, Fischer H, Pfleiderer SO, Reichenbach JR, Kaiser WA. ROBITOM-robot for biopsy and therapy of the mamma. Biomed Tech (Berl) 2002;47(Suppl 1 Pt l):2–5.
Larson BT, Erdman AG, Tsekos NV, Yacoub E, Tsekos PV, Koutlas IG. Design of an MRI-compatible robotic stereotactic device for minimally invasive interventions in the breast. J Biomech Eng 2004;126(4):458–465.
Hempel E, Fischer H, Gumb L, Hohn T, Krause H, Voges U, Breitwieser H, Gutmann B, Durke J, Bock M, Melzer A. An MRI-compatible surgical robot for precise radiological interventions. Comput Aided Surg 2003;8(4):180–191.
Tsekos NV, Ozcan A, Christoforou E. A Prototype Manipulator for MR-guided Interventions Inside Standard Cylindrical MRI Scanners. J Biomech Eng 2005;127:972–980.
Seibel RM, Melzer A, Schmidt A, Plabetamann J. Computed Tomography-and Magnetic Resonance Imaging: Guided Microtherapy. Semin Laparosc Surg 1997;4(2):61–73.
Marescaux J, Leroy J, Gagner M, Rubino F, Mutter D, Vix M, Butner SE, Smith MK. Transatlantic robot-assisted telesurgery. Nature 2001;413(6854):379–380.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2006 International Federation for Information Processing
About this paper
Cite this paper
Karanikolas, M., Christoforou, E., Akbudak, E., Eisenbeis, P.E., Tsekos, N.V. (2006). An Archetype for MRI guided Tele-interventions. In: Maglogiannis, I., Karpouzis, K., Bramer, M. (eds) Artificial Intelligence Applications and Innovations. AIAI 2006. IFIP International Federation for Information Processing, vol 204. Springer, Boston, MA . https://doi.org/10.1007/0-387-34224-9_55
Download citation
DOI: https://doi.org/10.1007/0-387-34224-9_55
Publisher Name: Springer, Boston, MA
Print ISBN: 978-0-387-34223-8
Online ISBN: 978-0-387-34224-5
eBook Packages: Computer ScienceComputer Science (R0)