
Abstract
Results from an field experiment on the registration of induced seismoacoustic waves under conditions of ice are discussed. A surface measuring system whose separate elements are autonomous low-frequency geohydroacoustic buoys is used in the experiment. Data from continuous measurements of ambient noise are analyzed to study the possibility of using passive seismoacoustic methods for reconstructing the parameters of a shallow sea.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
INTRODUCTION
Interest in studying the processes of waves in an ice-covered sea has been growing steadily, due to the need for developing Arctic seas and the shelf zone in particular. The experimental work now being performed by experts at the Arctic and Antarctic Research Institute [1] include problems of analyzing elastic wave fields in a block of ice by installing seismic detectors on drift ice. Studies based on recording the s- and p-seismic waves generated by seismic events (earthquakes) are also important [2]. Finally, the aim of the above projects is to solve problems of reconstructing a medium’s characteristics by recording signals from powerful sources.
In recent years, wave fields in both hydroacoustics [3] and seismology [4] have been analyzed by passive means that allow us to determine the properties of a medium by recording ambient noise. The aim of this work was to study the possibilities of using modern ways of analyzing random noise signals recorded in an experiment on an ice cover to solve problems of seismoacoustic tomography. As was shown in [5] by using a special seismic sensor deployed on an ice cover, normal hydroacoustic modes and Raleigh-type bottom surface waves can be recorded in the active mode along with bending gravity oscillations of the ice.
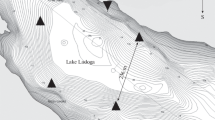
In this work, we analyze noise data obtained in 2018 as part of a continuous field experiment on an ice field in the northwestern part of Lake Ladoga [6], where the experimental conditions are those of a shallow sea. As was shown earlier, the possibility of separating an intense seismoacoustic signal recorded on the ice’s surface into the mode components in the model of a layered medium [7] allows us to move on to studying the characteristics of ambient noise in order to identify useful components whose main parameters coincide with features of signals received in the active mode. The field’s distance from industrial facilities and shipping lines guarantees quiet acoustic and seismic waves at the level of natural noise. The measuring stations were deployed on the surface of the ice cover at the vertices of a regular pentagon (Fig. 1), forming an array with a small aperture. The ice was 0.2–0.35 m thick at different places, and the lake depth varied from 7 to 20 m. The signals were received using the five autonomous geohydroacoustic buoys embedded in the ice that were described in detail in [8]. In each experiment, the buoys were used to measure the vertical component of the velocity of oscillation in a broad bandwidth of 0.03–50 Hz. The receiving system operated autonomously for five days, making nonstop synchronous recordings of signals with a digitization frequency of 500 Hz. The accuracy of the devices’ operation was determined prior to each experiment using comparative measurements made at one place with all buoys and at the Guralp 3ESPCD reference seismic station.

Layout of autonomous geohydroacoustic receivers on the ice of Lake Ladoga in our 2018 experiment.
SPECTRAL ANALYSIS OF EXPERIMENTAL DATA
To study the main features of seismoacoustic ambient noise recorded on the ice’s surface, we performed a comparative analysis of a synchronous nighttime record made on the ice and in the basement of a building located 600 m offshore. Figure 2 presents the power spectral density of the vertical component of seismic noise recorded on the shore and the seismoacoustic noise received on the ice. The power spectral density of seismoacoustic noise was estimated for 30‑min intervals with a 50% overlap. Only one type of instrument was used in measuring. The spectral compositions of noise recoded at different points on the ice turned out to be quite similar, so the plot shows only one of them. The pale bold curves in Fig. 2 show the model estimates of low (NLNM, new low noise model) and high (NHNM, new high noise model) levels of the power spectral density of seismic noise. These were determined by averaging (according to Peterson [9]) a large volume of experimental data obtained around the world. The fine grey curve has a clear maximum in the band of 0.22 Hz. This corresponds to microseisms of the second type, the generation of which is associated with Rayleigh waves generated by the ocean [10]. They are fairly intense (close to the NHNM), due possibly to the nearby reservoir. The narrowband peaks in the 2.5–5 Hz band of frequencies are of anthropogenic origin and can likely be attributed to the daily life in the house where the receiver was installed.

Power spectral density of the vertical component of seismoacoustic noise recorded on the shore (in grey) and on the surface of the ice (in black).
The energy of the seismoacoustic noise recorded by the instruments embedded in the ice (the black curve in Fig. 2) exceeds that of purely seismic vibrations by a factor of several hundred. In addition, the ice noise in the 0.35–2.5 Hz band is louder than the maximum average level of NHNM, making it difficult to perform classic seismological studies on the ice cover’s surface due to the low final signal-to-noise ratio. On the other hand, a small peak corresponding to the microseisms can be observed on the ice as well. The loudest noise is associated with the 1–2.5 Hz band and was likely due to the bending gravity oscillations of the ice plate caused by local impacts on the ice and gravity waves in the water [11]. The bending gravity waves are almost an order of magnitude slower than the seismic and acoustic waves, allowing us in some cases to use effective algorithms for filtering noise of this type, based on spectral–temporal analysis [12].
We once again emphasize that the intense noise generated on and beneath the ice greatly limits the use of embedded seismometers in receiving earthquake-induced signals, so developing fundamentally new ways of analyzing seismoacoustic data that use noise as a source of useful information are of high priority.
ESTIMATING THE TIME OF SEISMOACOUSTIC SIGNAL PROPAGATION IN THE PASSIVE MODE
The familiar tomographic ways of reconstructing the parameters of a layered medium [13] are based on comparing rates of propagation obtained experimentally and calculated using theoretical models. At the first stage, we must determine the times of wave propagation in the passive mode along the paths connecting all possible pairs of receivers. In processing the experimental data, we use a Green function estimate of the medium according to the data of ambient noise [3]. This consists of analyzing the function of the mutual correlation of different pairs at the seismoacoustic stations. The autonomous geohydroacoustic buoys used in our experiments allow us to obtain continuous series of noise data over long periods of time. In constructing the mutual correlation functions for each separate receiver, whole five-day long records were divided into one-hour intervals. Each interval was independently subjected to amplitude normalization and spectrum whitening in order to reduce the influence of localized sources of signals. We then formed pairs and calculated the cross-correlation functions for time intervals one hour long, which were later averaged over the measuring period.
As an example, Fig. 3 shows the cross-correlation function for the pair of stations A and B (Fig. 1), plotted for different bands of frequencies. (In Fig. 3, f is frequency and τ is the time delay corresponding to a window offset along the time axis). The correlation function maxima, which are symmetrical to the zero time delay, indicate the times of seismoacoustic signal propagation in opposite directions along the straight line between the two receivers. The estimated times of propagation along the different paths shown in Fig. 1 and at different frequencies were the initial data for reconstructing the medium by means of tomography [13]. An important advantage of the passive approach is that this is how it covers a broad band of frequencies, including the low-frequency region where oscillations are not easily excited by using a seismic source.

Averaged cross-correlation function of ambient noise accumulated over five days for the pair of measuring stations A and B (Fig. 1) in the different bands of frequencies with the central frequency indicated on the Y-axis.
The distance between receivers A and B was 220 m, so we can determine the velocity of wave propagation between the two receivers by estimating the time of propagation from the maximum of the envelope of the correlation function. Figure 3 clearly shows the dispersion of the most intense component. In the upper part of the plot, the time of propagation is reduced upon an increase in frequency, so the velocity increases. This behavior is especially typical of a bending gravity wave [6, 11]. We calculated its velocity as ≈140 m s−1 at a frequency of 6.3 Hz, and it rose to ≈184 m s−1 at a frequency of 10 Hz. Our experimental estimates were confirmed by theoretical calculations [6] of dispersion of the bending gravity wave velocity for parameters conforming to the experimental conditions. We also observed local maxima weaker than the main one at short time delays. These irregular maxima likely corresponded to faster hydroacoustic and bottom surface modes. Under our experimental conditions, however, we could not detect them in the broad band of frequencies with sufficient accuracy for use in tomography.
CONCLUSIONS
Our field experiment for measuring ambient seismoacoustic noise, performed with autonomous low-frequency geohydroacoustic buoys embedded in ice, allowed us to analyze the intensity and spectral composition of noise formed under conditions of ice. A comparison of the power spectral density levels showed that the use of standard seismological means was limited for measurements made on ice, due to the presence of high-amplitude broadband bending gravity noise.
Detailed analysis of the natural background noise created over long periods of time under conditions of ice demonstrated that the models (hydroacoustic and seabed) currently showing the most promise for practical application can be distinguished against the background of bending gravity oscillations only qualitatively. To solve a tomographic problem with our spacing between instruments when the required accuracy for determining the time of propagation is ~0.001 s, we must develop additional means for the spectral–temporal processing of natural noise. At the same time, the algorithm used in this work to estimate the times of bending gravity wave propagation in a broad band of frequencies in the passive mode served as the basis for building tomographic ways of estimating the parameters of an ice cover and remotely monitoring ice.
REFERENCES
Kornishin, K.A., Pavlov, V.A., Smirnov, V.N., et al., Vestn. OAO “NK Rosneft’”, 2016, no. 2, p. 85.
Schlindwein, V., Müller, C., and Jokat, W., Geophys. Rev. Lett., 2005, vol. 32, L18306.
Burov, V.A., Sergeev, S.N., and Shurup, A.S., Acoust. Phys., 2008, vol. 54, no. 1, p. 42.
Snieder, R., Phys. Rev. E: Stat., Nonlinear, Soft Matter Phys., 2004, vol. 69, 046610.
Presnov, D.A., Zhostkov, R.A., Sobisevich, A.L., et al., Bull. Russ. Acad. Sci.: Phys., 2017, vol. 81, no. 1, p. 68.
Presnov, D.A., Sobisevich, A.L., Gruzdev, P.D., et al., Acoust. Phys., 2019, vol. 65, no. 5, p. 593.
Sobisevich, A.L. and Razin, A.V., Geoakustika sloistykh sred (Geoacoustics of Layered Media), Moscow: Inst. Fiz. Zemli, Ross. Akad. Nauk, 2012.
Sobisevich, A.L., Presnov, D.A., Agafonov, V.M., et al., Seism. Instrum., 2018, vol. 54, no. 6, p. 677.
Peterson, J.R., Observations and modeling of seismic background noise, in U.S. Geological Survey, 1993.
Ardhuin, F., Stutzmann, E., Schimmel, M., et al., J. Geophys. Res., 2011, vol. 116, C05002.
Muzylev, S.V., in Sb. statei, posvyashchennyi 100-letiyu so dnya rozhdeniya prof. P.S. Lineikina (Collection of Papers Dedicated to the 100th Anniversary of Professor P.S. Lineikin), Moscow: Triada, 2010.
Sobisevich, A.L., Presnov, D.A., Sobisevich, L.E., et al., Bull. Russ. Acad. Sci.: Phys., 2018, vol. 82, no. 5, p. 496.
Presnov, D.A., Sobisevich, A.L., and Shurup, A.S., Phys. Wave Phenom., 2016, vol. 24, no. 3, p. 249.
Funding
This work was supported by the Russian Foundation for Basic Research as part of scientific projects 16-29-02046 and 18-05-70034.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by L. Mukhortova
About this article

Cite this article
Presnov, D.A., Sobisevich, A.L. & Shurup, A.S. Research of Shallow Sea Passive Tomography Based on Ice Measurements Data. Bull. Russ. Acad. Sci. Phys. 84, 669–672 (2020). https://doi.org/10.3103/S1062873820060209
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1062873820060209