
Abstract
Understanding the fracture toughness of glasses is of prime importance for science and technology. We study it here using extensive atomistic simulations in which the interaction potential, glass transition cooling rate, and loading geometry are systematically varied, mimicking a broad range of experimentally accessible properties. Glasses’ non-equilibrium mechanical disorder is quantified through \(A_{\rm g},\) the dimensionless prefactor of the universal spectrum of non-phononic excitations, which measures the abundance of soft glassy defects that affect plastic deformability. We show that while a brittle-to-ductile transition might be induced by reducing the cooling rate, leading to a reduction in \(A_{\rm g}\), iso-\(A_{\rm g}\) glasses are either brittle or ductile depending on the degree of Poisson contraction under unconstrained uniaxial tension. Eliminating Poisson contraction using constrained tension reveals that iso-\(A_{\rm g}\) glasses feature similar toughness, and that varying \(A_{\rm g}\) under these conditions results in significant toughness variation. Our results highlight the roles played by both soft defects and loading geometry (which affects the activation of defects) in the toughness of glasses.
Impact statement
Glasses are non-crystalline materials that find an enormous range of industrial and technological applications. They are typically formed by rapidly cooling liquids, resulting in arrested out-of-equilibrium states lacking the long-range order of their crystalline counterparts. The emerging disordered structures, which vary with the formation cooling rate, give rise to large variability in material properties. Among these, the fracture toughness—quantifying materials’ ability to resist catastrophic failure in the presence of a crack—is of prime importance; understanding its physical origin and range of variability is a major challenge with far-reaching implications. To address this challenge, we employ cutting-edge and extensive computer simulations of glasses, spanning a range of material properties that is comparable to that of real-life glasses. We focus on the failure resistance and show that it is controlled by both the abundance of soft defects inside the glass, which are responsible for glasses’ plastic deformability, and by the loading configuration of the fracture test employed, which affects the imposed deformation geometry. These two physical factors control together a transition from ductile-like (gradual, accompanied by extensive plastic deformation) failure to brittle-like (abrupt, accompanied by little and localized plastic deformation) failure.
Graphic abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Glasses are intrinsically non-equilibrium materials whose properties may vary vastly with their thermomechanical history (e.g., the cooling rate at which they are formed from a melt).1 The non-equilibrium nature of glasses is mesoscopically manifested through a broad range of disordered structures, which qualitatively differ from the corresponding ordered structures featured by their crystalline counterparts. Macroscopically, the non-equilibrium nature of glasses may be manifested in a substantial variability in various material properties, even for the very same composition.
One such important material property is the ability of a glass to resist catastrophic failure. The latter is commonly quantified by the fracture toughness, which measures the material resistance to failure in the presence of an initial crack.2 The value of the fracture toughness reflects a multitude of spatiotemporal processes that take place in the material prior to catastrophic failure. In one limit, failure is accompanied by rather localized plastic deformation (Figure 1a, right) and is generally quite abrupt. The fracture toughness is typically small in this case, and failure is commonly termed brittle-like. In the opposite limit, failure is accompanied by significant spatially extended plastic deformation (Figure 1a, left) and is generally more gradual. The fracture toughness is typically larger in this case, and failure is commonly termed ductile-like.

Computer glasses span a broad range of macroscopic and mesoscopic material properties. (a) Snapshots of the non-affine (plastic) deformation during fracture tests with an initial diamond crack for ductile-like (left) and brittle-like (right) failure. The non-affine deformation is quantified by the widely used \(D^2_{\rm min}\) field,3 here and throughout this paper, where a darker color is indicative of more intense plastic deformation. (b) The modified Lennard-Jones type potential \(\upvarphi (r)\) used in this work (see “Materials and methods” section). \(\upvarphi \) is plotted vs. the normalized interparticle distance \(r/r_{\rm min}\), where \(r_{\rm min}\) is the minimum of the potential. The parameter \(r_{\rm c}\) controls the strength and range of the attractive term. (c) The shear modulus \(\upmu \) (reported in simulational units, see “Materials and methods” section) vs. the quench rate \(\dot{T}\) for various \(r_{\rm c}\) values. The color code for the latter is detailed in the legend, and will be adopted throughout the paper. (d) Poisson’s ratio \(\upnu \) vs. \(\dot{T}\). The meaning of the open orange squares is explained in panel (f) below. (e) The vibrational density of states (vDOS) of QLMs for \(\dot{T} = 0.05\) and two values of \(r_{\rm c}\) (cf. color code in panel (c)). The peak in the vDOS corresponds to the first (phononic) shear wave. (f) The prefactor \(A_{\rm g}\) of the universal non-phononic vDOS \(D(\upomega ) = A_{\rm g}\,\upomega^4\), made dimensionless through scaling by \(\upomega_0^5\) (see text for the definition), as a function of \(\dot{T}\). A narrow band of nearly equal \(A_{\rm g}\) values is highlighted by a blurry orange region, and the glasses within this narrow band are marked by open orange squares (the same glasses are marked in panel (d)). (g) The sample-to-sample shear modulus \(\upmu_{\rm s}\) distributions \(P(\upmu_{\rm s}/\upmu )\) for the same glasses as in (e). \(\upmu \) is the mean (plotted in panel (c)) and the width of one of the distributions, indicative of the magnitude of shear modulus fluctuations, is marked by \(\Updelta \upmu \). (h) The dimensionless quantifier of shear modulus fluctuations \(\upchi \) (see “Materials and methods” section for exact definition) is plotted against \(\dot{T}\) for various \(r_{\rm c}\)’s. The open orange squares have the same meaning as in panels (d) and (f). As stated above, the same color code describing different values of \(r_{\rm c}\) is maintained throughout this paper.
Understanding the transition between these two modes of failure is an important challenge in materials science.4,5,6,7,8,9 Establishing, understanding, and predicting structure–dynamics–properties relations in glasses (e.g., in the context of material failure), involve various challenges. First, one should develop tools to quantify the disordered structures featured by glasses. Second, one should identify a certain sub-class of structural degrees of freedom that is relevant for a given macroscopic material property. Third, one should understand the dynamic evolution of these relevant degrees of freedom under some prescribed conditions. Finally, one should be able to coarse-grain over mesoscopic structural degrees of freedom in order to understand how collective dynamics control the macroscopic material property.
Quantifying mesoscopic structural and mechanical disorder in glasses is challenging. One aspect of the challenge is that we generally lack tools and concepts to distinguish one disordered state from another, in sharp contrast to well-established “order parameters” in other condensed-matter systems.10 Another aspect of the challenge is the associated length scales; glassy disorder typically manifests itself on small length scales, usually corresponding to a few atomic distances, which are not directly accessible to currently available experimental techniques in molecular glasses. Consequently, computer glasses—where such length scales are readily accessible—have played important roles in our understanding of glassy disorder.11,12,13,14
Recently, computer studies revealed and substantiated the existence of low-frequency (soft) non-phononic vibrational modes in glasses.14,15,16,17,18,19,20,21 These soft vibrational modes (or excitations) have been shown to be quasilocalized in space,16,17,22 as opposed to the spatially extended nature of low-frequency phonons (i.e., plane waves), hence they are termed hereafter quasilocalized modes (QLMs). Moreover, QLMs have been shown to follow a universal vibrational density of states (vDOS) \(\mathcal{D}(\upomega ) \sim \upomega^4\), where \(\upomega \) is the angular vibrational frequency14,15,19,20, 23,24,25,26,27,28 (examples in Figure 1e). As the \(\upomega^4\) law is universal (i.e., independent of the glass composition, interatomic interactions, and dimensionality) all of the glass history dependence is encapsulated in the non-universal prefactor \(A_{\rm g}\), defined through \(\mathcal{D}(\upomega ) \equiv A_{\rm g}\,\upomega^4\). \(A_{\rm g}\), once properly non-dimensionalized (see next), has been shown to provide a measure of the number density of QLMs in a glass.14,15,26,29,30
QLMs, in turn, have been shown to correlate with the spatial loci of irreversible rearrangements in glasses (i.e., they statistically correlate with shear transformation zones (STZs), the carriers of plasticity in glassy materials).18,21,31,32,33,34,35,36 As such, the properly non-dimensionalized \(A_{\rm g}\) is directly relevant for plastic deformability, and consequently to the fracture toughness, as it provides a measure of the number of soft defects embedded inside glassy structures.14,15,29,30 Another measure of mesoscopic mechanical disorder in glasses can be defined using the fluctuations of the shear modulus \(\upmu \).29,37,38,39,40 This measure, denoted hereafter by \(\upchi \) (see “Materials and methods” section and Figure 1h), has been recently shown to control the rate of wave attenuation in computer glasses,39,41,42 (i.e., the amplitude of Rayleigh scattering rates in the low-frequency [long-wavelength] limit). In this article, we will be using \(A_{\rm g}\) and \(\upchi \) as quantifiers of mesoscopic glassy disorder, which are directly relevant to the fracture toughness.
\(A_{\rm g}\) and \(\upchi \) allow one to compare on equal footing different glasses, either glasses of the same interatomic interactions/composition formed by different thermal protocols or glasses of different interatomic interactions/composition. While existing evidence clearly indicates that \(A_{\rm g}\) and \(\upchi \) must play important roles in determining the fracture toughness of these materials, one obviously cannot exclude the possibility that other physical quantities and factors play a role as well. Indeed, some experimental and computational studies4,5,6,43,44,45,46 suggested that Poisson’s ratio \(\upnu \) plays an important role in determining the fracture toughness of glasses (though some other studies challenged this view).7,29,47 A possible interpretation is that \(\upnu \) is sensitive to the structure of a glass, and in particular, that it may be indirectly related to plastic deformability and its sensitivity to shear versus tensile deformation,6,48 and hence affects the toughness. As such, one can speculate that the observed effect of \(\upnu \) is not qualitatively different from that of \(A_{\rm g}\) and \(\upchi \)—indeed we show below that well-defined relations between \(\upnu \) and \(A_{\rm g}\) (and \(\upchi \)) exist. It remains unclear, however, whether \(\upnu \)—or more precisely Poisson contraction/effect and other loading geometry effects—also play distinct roles in determining the toughness.
Our goal in this article is to understand the roles played by soft defects, as quantified by \(A_{\rm g}\) and indirectly by \(\upchi \), and by the loading geometry employed in mechanical tests on the fracture toughness of glasses, in particular on brittle-to-ductile transitions. This goal is achieved by employing extensive computer glass simulations in 3D, which offer a powerful and flexible platform to address the posed questions. To mimic glasses’ compositional variability, we employ computer models based on Lennard–Jones interatomic pairwise potentials with a tunable parameter \(r_{\rm c}\) (to be accurately defined next), shown recently to give rise to glasses of widely variable properties.29,49,50,51 We also apply a broad range of cooling rates \(\dot{T}\) across the glass transition (to be accurately defined next). In addition, we employ cutting-edge algorithms that allow to generate deeply supercooled glasses,40 to a degree that is comparable or even surpasses that of laboratory glasses. Overall, the range of variability of the macroscopic properties (e.g., \(\upmu \) and \(\upnu \), Figure 1c–d) of our computer glasses is comparable to that observed in laboratory glasses. Finally, we carefully and systematically vary the imposed loading geometry in the fracture toughness tests in order to quantify its effect on the toughness.
We find that the fracture toughness, and in particular brittle-to-ductile transitions, are controlled by both the abundance of soft defects—as quantified by \(A_{\rm g}\) (and indirectly by \(\upchi \))—and by the loading geometry of the fracture test. The latter affects the relative magnitude of shear and tensile deformation experienced by the material, and consequently the emerging plastic dissipation, for a fixed \(A_{\rm g}\). That is, the loading geometry controls the activation of soft defects, whose abundance is controlled by \(A_{\rm g}\). Only under a certain choice of loading geometry, where Poisson contraction can take place, Poisson’s ratio \(\upnu \) can be sensibly used to quantify the fracture toughness together with \(A_{\rm g}\) (or \(\upchi \)). These results provide basic insights into the physical origin of the failure resistance of glasses.
Results
In order to study the origin of brittle-to-ductile transitions in glasses, such as the one illustrated in Figure 1a, we first aim at generating computer glasses featuring a broad range of properties. This is achieved by employing the computer glass model put forward in Reference 49, where particles interact via a tunable Lennard–Jones-like pairwise potential (a similar approach was taken in Reference 52). In particular, the strength and range of the attractive term of the pairwise potential are controlled by a parameter \(r_{\rm c}\), as shown in Figure 1b and accurately defined in “Materials and methods” section. Varying \(r_{\rm c}\), which may qualitatively correspond to varying the glass composition, results in dramatic changes in emergent material properties, as will be discussed and demonstrated soon (see also References 29 and 50). In addition, we generate different glasses by quenching equilibrium liquids at a broad range of rates into their arrested glass phase. The cooling rate is quantified by \(\dot{T}\), the dimensionless absolute value of the rate of change of temperature during the quench (see “Materials and methods” section for precise definition). Yet another glass formation protocol, which is not quantified by \(\dot{T}\), is employed and discussed next.
In Figure 1c, we present the shear modulus \(\upmu \) (in simulation units, see “Materials and methods” section) as a function of \(\dot{T}\) for various values of \(r_{\rm c}\). The corresponding results for Poisson’s ratio \(\upnu \) are shown in Figure 1d. The range of variation in \(\upnu \) accessed by tuning \(r_{\rm c}\) compares well with the one for which the so-called ductile-to-brittle transition is observed in bulk metallic glasses,53 and see Supplementary Information for further comparisons between our model’s elastic properties and typical laboratory glasses’ elastic properties. While our model’s macroscopic linear response coefficients make direct contact with laboratory glasses, computer glasses offer unique access to various physical quantities that are not directly accessible to experiments, as previously highlighted. In Figure 1e, we present the vDOS of QLMs for two values of \(r_{\mathrm{c}}\) and a fixed \(\dot{T}\), both revealing the universal \({\mathcal{D}}(\upomega )=A_{\rm g}\,\upomega^4\) law. Here and elsewhere, we report frequencies in terms of \(\upomega_0 \equiv c_s/a_0\), where \(c_s\) is the (zero frequency) shear wave speed and \(a_0 \equiv (V/N)^{1/3}\) (V is the system’s volume containing N particles). The observed prefactor \(A_{\rm g}\) vastly varies between the two cases. \(A_{\rm g}\), made dimensionless through multiplication by \(\upomega_0^5\), is presented in Figure 1f for all \(\dot{T}\) and \(r_{\mathrm{c}}\) values used in Figure 1c–d. The dimensionless \(A_{\rm g}\) (hereafter we exclusively refer to the dimensionless one) indeed reveals large variability (notice the logarithmic scale in Figure 1f). Interestingly, different combinations of \(\dot{T}\) and \(r_{\rm c}\) result in nearly identical \(A_{\rm g}\) values (marked by open orange squares), a property that will be used next.

A ductile-to-brittle transition induced by varying the cooling rate through the glass transition. (a) Tensile stress–strain curves (unconstrained uniaxial tension) of glasses with \(r_{\rm c} = 1.3\), prepared at various quench rates \(\dot{T}\) (see legend). (b) The corresponding non-affine plastic deformation computed at \(\upepsilon = 0.15\).
\(A_{\rm g}\), providing a measure of the abundance of soft defects inside a glass,15 serves as a disorder quantifier that is relevant for plastic deformability and fracture toughness. Another quantifier of mechanical disorder in glasses can be obtained by considering the distribution of the local shear modulus, probed by studying a large number of systems of size N.39,51 In Figure 1g, we present the shear modulus distributions corresponding to the two cases shown in Figure 1e. It is observed that smaller \(A_{\rm g}\) glasses feature reduced shear modulus fluctuations \(\Updelta \upmu /\upmu \). The latter can be used to construct an N-independent quantifier of mechanical disorder in the form \(\upchi \equiv (\Delta \upmu /\upmu )\sqrt{N}\).39,41,42,51 The dependence of \(\upchi \) on both \(r_{\rm c}\) and \(\dot{T}\) is presented in Figure 1h, and the relation between \(\upchi \) and \(A_{\rm g}\) is further discussed next (Figure 3d and Supplementary Information). Next, we start considering the fracture toughness of the glasses at hand.
Reduction in cooling rate can induce a ductile-to-brittle transition
In order to probe the fracture toughness, we consider 3D glass samples containing an initial central crack of fixed geometry that cuts through the sample (in the thickness direction). In particular, we choose a diamond-shaped crack of fixed length and main vertex angle, which give rise to traction-free crack surfaces. The main vertex angle is chosen to be sufficiently small in order to reproduce the classical square root singularity of linear elastic fracture mechanics,2 see Supplementary Information for additional details. The initial crack length is chosen to be sufficiently larger than the particle size and sufficiently smaller than the sample’s dimensions in order to ensure reasonable scale separation, though we cannot entirely exclude any finite size effects (see Supplementary Information). All fracture toughness calculations are performed under quasistatic athermal conditions (i.e., vanishing applied strain-rate and zero temperature), as our focus is on the effect of glass structure and loading geometry on the toughness.

The fracture toughness depends on both the number of soft defects, quantified by \(A_{\rm g}\), and on Poisson contraction, quantified by \(\upnu \), under unconstrained uniaxial tension. (a) Snapshots of the non-affine (plastic) deformation at \(15\%\) strain in the \(r_{\rm c} - \dot{T}\) parametric plane (note that \(\dot{T}\) is decreasing from left to right). (b) Strain–strain curve for a poorly annealed (high \(\dot{T}\), thin curves) and well-annealed (low \(\dot{T}\), thick curves) glasses with various \(r_{\rm c}\). (c) \(A_{\rm g}\) versus \(\upnu \), where ductile-like glasses correspond to full symbols and brittle-like to empty ones. The orange squares and the blurry region indicate glasses with a nearly identical density of QLMs (iso-\(A_{\rm g}\)). (d) \(A_{\rm g}\) versus \(\upchi \), roughly following a power–law relation \(A_{\rm g} \sim \upchi^{10/3}\) for all glasses (see discussion in the Supplementary Information).
We first consider the effect of varying the cooling rate \(\dot{T}\) on the glass resistance to failure under unconstrained uniaxial tension, where ‘unconstrained’ means that the lateral edges (perpendicular to the tensile axis) are traction-free and hence free to contract. We focus here on the \(r_{\rm c}=1.3\) glass ensemble, and plot in Figure 2a the tensile stress–strain curves for four different cooling rates \(\dot{T}\) (see legend). It is observed that for the two largest \(\dot{T}\) values, the corresponding glasses feature gradual stress relaxation after reaching a peak stress, with no clear sign of catastrophic failure. For the two smallest \(\dot{T}\) values, however, the glass appears to lose its load-bearing capacity at a well-defined strain level, indicating catastrophic failure. Consequently, there appears to exist a cooling rate that induces a ductile-to-brittle transition, as was also demonstrated in the previous work.9,54,55,56 This is corroborated by the spatiotemporal dynamics of the deformed samples, as demonstrated in Figure 2b, where snapshots at \(15\%\) strain are shown. Consistent with the stress–strain curves, we observe that while glasses formed under the two highest cooling rates feature a blunted crack accompanied by large-scale plastic deformation (darker regions, see figure caption), glasses cooled at the two lowest rates feature a crack that propagates through the samples, accompanied by rather localized plastic deformation.
It is known that varying the cooling rate \(\dot{T}\) leads to varying glass structures and consequently to variation in many material properties of a glass.14,57,58 Our next goal is to understand which physical properties control the ductile-to-brittle transition observed in Figure 2, when \(\dot{T}\) is varied.
Do soft defects exclusively control the ductile-to-brittle transition? The role of Poisson contraction under unconstrained uniaxial tension
As explained in the Introduction, \(A_{\rm g}\)—whose \(\dot{T}\) dependence is presented in Figure 1f—is a natural candidate for controlling the observed ductile-to-brittle transition. To test this natural expectation, we cannot restrict ourselves to a single \(r_{\rm c}\) value; rather, we employ glasses cooled at different quench rates \(\dot{T}\) and of different interaction parameters \(r_{\rm c}\) that nevertheless share nearly the same (dimensionless) \(A_{\rm g}\). These glasses, which are marked by open orange squares in Figure 1f, are expected to feature similar resistance to failure—if indeed \(A_{\rm g}\) fully controls the fracture toughness of glasses. In Figure 3a, we plot \(15\%\)-strain snapshots in the \(r_{\rm c} - \dot{T}\) parametric plane (covering the whole range of employed parameters)—similarly to Figure 2b (in fact, the latter is reproduced here in the third row from the top) —, where the nearly iso-\(A_{\rm g}\) are highlighted by open orange rectangles. It is observed that iso-\(A_{\rm g}\) glasses are either brittle-like or ductile-like, indicating that \(A_{\rm g}\) does not exclusively control the fracture toughness under the present conditions (i.e., under unconstrained uniaxial tension). This conclusion is corroborated by the stress–strain curves presented in Figure 3b. In addition, it is observed that ductile-like behavior (e.g., the top two rows of Figure 3a) is accompanied by the formation of shear bands, whose width appears to decrease with decreasing \(\dot{T}\). We hypothesize that this trend might echo recent results demonstrating that the typical linear size of soft defects/STZs decreases by up to a factor of two upon thermal annealing.15

Brittle–ductile phase diagram in the \(\upchi \)-\(\upnu \) plane under unconstrained uniaxial tension. (a) \(\upchi \) versus the stiffness parameter \(k_\uplambda \) of FSP glasses. (b) The corresponding \(\upnu (k_\uplambda )\). (c) Unconstrained uniaxial tension stress–strain curves for glasses with \(r_{\rm c}=1.5\), prepared with different stiffness \(k_\uplambda \) as indicated in the legend. Snapshots show the non-affine deformation at \(15\%\) strain. See text for additional discussion. (d) Ductile–brittle phase diagram in the \(\upchi - \upnu \) plane for FSP glasses, where ductile-like glasses correspond to full symbols and brittle-like to empty ones. (inset) the same, but for glasses prepared via a conventional MD quench. The results presented in the inset correspond to those already presented in Figure 3c, d.
What additional physical quantities/factors/processes, which also vary with \(\dot{T}\), play a role in ductile-to-brittle transitions in glasses? These, once identified, should allow to differentiate between the qualitatively different behaviors observed among the iso-\(A_{\rm g}\) glasses, highlighted by open orange rectangles in Figure 3a. As explained in the Introduction, there exists some evidence4,5,6,43,44,45,46 that Poisson’s ratio \(\upnu \) might affect the fracture toughness of glasses. The \(\dot{T}\) dependence of \(\upnu \) for our glasses is presented in Figure 1d, clearly indicating that iso-\(A_{\rm g}\) glasses feature different \(\upnu \)’s (marked by open orange squares). Consequently, we present in Figure 3c a brittle–ductile phase diagram in the \(A_{\rm g} - \upnu \) plane, where ductile-like glasses correspond to full symbols and brittle-like to empty ones (we include data for all of our glasses, across the full range of \(\dot{T}\) and \(r_{\rm c}\) values employed, as in Figure 1). It is observed that iso-\(A_{\rm g}\) glasses of relatively high \(\upnu \) are ductile-like, while those with smaller \(\upnu \) are brittle-like. This indicates that \(\upnu \) might indeed plays a role in the fracture toughness of glasses.
What is the physical (and causal) effect of \(\upnu \) on the fracture toughness? Before setting out to address this important question, we aim at further substantiating the claim that both glassy disorder—as quantified by either \(A_{\rm g}\) or \(\upchi \)—and some effect that is related to \(\upnu \) play a role in determining the fracture toughness of glasses. The results presented in Figure 3c clearly support this claim, yet for relatively large values of \(r_{\rm c}\) it is impossible to reach sufficiently small \(A_{\rm g}\) levels to probe the brittle regime using conventional Molecular Dynamics (in which glasses are formed by quenching their corresponding liquids). Consequently, we employ next recently introduced computer algorithms that allow the generation of glassy solids featuring \(A_{\rm g} \rightarrow 0\), qualitatively representing extreme supercooling conditions.
To this aim, we first note that as shown in Figure 3d, glasses form by quenching a liquid feature a clear relation between \(A_{\rm g}\) and \(\upchi \) (see also Supplementary Information). The existence of such a relation, which appears to be weakly dependent on \(r_{\rm c}\), suggests that for these glasses one can approximately use \(A_{\rm g}\) and \(\upchi \) interchangeably. This is not the case for systems featuring \(A_{\rm g} \rightarrow 0\). The latter can be generated by a protocol that is referred to in what follows as the FSP algorithm, described in detail in “Materials and methods” section and in Reference 40; forming a computer glass using the FSP algorithm amounts to minimizing an augmented potential parameterized by a stiffness \(k_\uplambda \) that controls the mechanical noise of the resulting glasses (while \(r_{\rm c}\) can still be varied, see “Materials and methods” section), with lower-\(k_\uplambda \) FSP glasses featuring less mechanical fluctuations.40 As is now established, FSP glasses can feature a gap in their non-phononic vDOS40 for sufficiently small \(k_\uplambda \), and in particular in this limit they do not feature the \(\upomega^4\) law. That is, lower-\(k_\uplambda \) FSP glasses essentially feature \(A_{\rm g} \rightarrow 0\). Yet, these glassy solids still exhibit a finite and well-defined \(\upchi \), as demonstrated in Figure 4a. Moreover, \(\upnu \) also varies systematically with \(k_\uplambda \) and \(r_{\rm c}\), as shown in Figure 4b.
The merit of FSP glasses in the present context is evident from panels (a) and (b) of Figure 4. That is, we have at hand glasses with \(A_{\rm g} \rightarrow 0\) (in the low \(k_\uplambda \) regime), whose \(\upchi \) and \(\upnu \) can be systematically varied. Consequently, FSP glasses are most suitable for exploring the ductile-to-brittle transition in terms of both \(\upchi \) and \(\upnu \), providing access to broader region of the brittle-like phase. In Figure 4c, we present the stress–strain curves of FSP glasses with \(r_{\rm c}=1.5\) for three values of \(k_\uplambda \), together with spatial snapshots of each glass at a late stage in the loading process. For the largest \(k_\uplambda \) value (\(k_\uplambda =1000\)), the behavior is ductile-like, exhibiting extensive (system covering) plastic deformation and steady-state flow, essentially being insensitive to the initial crack. For the smallest \(k_\uplambda \) value (\(k_\uplambda =50\)), we enter into the brittle-like regime, where catastrophic failure takes place, accompanied by localized plastic deformation near the crack (which is predominantly perpendicular to the tensile axis) and an abrupt drop in the stress when the sample loses its load-bearing capacity. Interestingly, for the intermediate \(k_\uplambda \) value (\(k_\uplambda =100\)), the initial crack started growing along an inclined shear-band (resulting in a finite abrupt stress drop), but eventually plastic deformation in the shear-band took over (resulting in a gradual stress relaxation towards a plateau), with no catastrophic failure.

Different loading geometries and their effect on the imposed deformation. (a) An illustration of a 2D projection of a 3D system (top), where the gray square of dimensions \(L_0 \times L_0\) represents the undeformed state. Under unconstrained uniaxial tension loading (applied strain \(\upepsilon_{\Vert }\) in the vertical direction), the system is free to contract in the two transverse/lateral directions (the out-of-plane direction is not shown), resulting in strain of magnitude \(\upepsilon_\perp < 0\), see the empty rectangle (illustrating the deformed state). In this loading geometry, one has \(R = -\upepsilon_\perp /\upepsilon_{\Vert } = \upnu \le 1/2\) (i.e., the relative importance of tensile and shear deformation is determined in this loading geometry by Poisson’s ratio, \(\upnu \)). (b) The same as panel (a), but for constrained tension loading. In this loading geometry, one has \(\upepsilon_\perp = 0\), resulting in \(R = -\upepsilon_\perp /\upepsilon_{\Vert } = 0\) (see empty rectangle, and note that the gray \(L_0 \times L_0\) square is the same as in panel [a]). (c) The same as panels (a) and (b), but for pure shear loading. In this loading geometry, one has \(\upepsilon_\perp = -1/2\upepsilon_{\Vert }\), resulting in \(R = -\upepsilon_\perp /\upepsilon_{\Vert } = 1/2\) (see empty rectangle, and note that again the gray \(L_0 \times L_0\) square is the same as in panels [a] and [b]). At the bottom of each panel, we present a pair of \(\upepsilon_{\Vert } = 0.15\) snapshots, with \(\upnu = 0.367\) (red, left) and \(\upnu = 0.275\) (blue, right), deformed under the stated R value. It is observed that the smaller R, the more localized plastic deformation is, and correspondingly the more brittle-like failure is.
We performed an extensive analysis of all FSP glasses at hand (the four \(r_{\rm c}\) values studied earlier and a broad range of \(k_\uplambda \) values) and present the results in Figure 4d in a phase diagram in the \(\upchi \)-\(\upnu \) plane, where a ductile-like behavior corresponds to full squares (color code as in Figure 1) and a brittle-like behavior corresponds to empty squares. First, it is observed that indeed FSP glasses allow to explore a broader region of the brittle-like phase. Second, and most importantly, it is observed that both \(\upchi \) and \(\upnu \) (more precisely some effect that is related to \(\upnu \)) play a role in the ductile-to-brittle transition, as is evident from the curved phase boundary (a blurry region is added as a guide to the eye).
Finally, we add in the inset the results for the glasses formed by quenching a liquid—presented earlier in Figure 3 (but not in the \(\upchi \)-\(\upnu \) plane). Interestingly, despite the widely different glass formation protocols involved, the two classes of glasses appear to reveal a qualitatively similar ductile–brittle phase diagram in the \(\upchi \)-\(\upnu \) plane, where both decreasing \(\upchi \) and \(\upnu \) promote a brittle-like behavior. It is important to note again that the results presented in Figure 4d were obtained for our choice of initial crack of fixed geometry and dimensions (see also Supplementary Information); varying the latter may change quantitative aspects of the results, but the combined effect of \(\upchi \) and \(\upnu \) on the fracture toughness under unconstrained uniaxial tension conditions is general. Once this is established, we focus our attention on the question previously posed regarding the physical (and causal) effect of \(\upnu \) on the fracture toughness, which is addressed next.
The interplay of loading geometry and plastic deformability: Constrained tension and soft defects again
Poisson’s ratio \(\upnu \) is a linear elastic (reversible) response coefficient that quantifies the relative transverse contraction of a material under unconstrained (transversely free) uniaxial tension. In assessing the relevance of \(\upnu \) to the fracture toughness of glasses, one can a priori distinguish two qualitatively different classes of physical effects. First, \(\upnu \) can be viewed as a directly and easily measurable quantity that allows to indirectly probe non-linear irreversible response coefficients that are relevant for plastic deformability and toughness. Indeed, \(\upnu \) is expected to vary when the material structure and interactions vary, and in particular it exhibits systematic variations with \(A_{\rm g}\) and \(\upchi \), as demonstrated in Figures 3 and 4. Second, \(\upnu \)—as a linear elastic coefficient—may affect the geometry of deformation glasses experience under external driving forces. In particular, in the unconstrained uniaxial tension tests exclusively considered up to now, \(\upnu \) controls the degree of Poisson contraction, which in turn determines the relative magnitude of tensile and shear deformation. That is, \(\upnu \) in this loading geometry will affect the activation of soft defects (whose number is controlled by \(A_{\rm g}\)), which are generally more sensitive to shear deformation.
As physically relevant disorder measures such as \(A_{\rm g}\) and \(\upchi \) have been identified and quantified, we hypothesize that a linear elastic response coefficient such as \(\upnu \) does not contain additional physical information about plastic deformability, on top of \(A_{\rm g}\) and/or \(\upchi \). Consequently, while in the absence of well-founded quantifiers of glassy disorder one may use \(\upnu \) as some rough proxy of disorder, when these are at hand and taken into account—as is the case here—the effect of \(\upnu \) in the phase diagram of Figure 4d strongly points towards the second possibility previously discussed. That is, one needs to understand the role of the deformation/loading geometry on the fracture toughness, both in relation to \(\upnu \) and in more general terms.
To address the latter, we introduce here the biaxiality ratio R (Figure 5), defined as \(R \equiv -\upepsilon_\perp /\upepsilon_{\Vert }\), where \(\upepsilon_{\Vert }\) is the tensile/extensional strain and \(\upepsilon_\perp \) corresponds to the transverse strains (i.e., the strain components in the directions perpendicular to the applied tension axis). The main utility of R is that it quantifies the relative importance of tensile and shear deformation imposed by the loading geometry, and since soft defects (STZs) are most sensitive to shear deformation,3 R offers a simple measure of the fraction of soft defects being activated under a certain loading geometry (while their number is controlled by \(A_{\rm g}\)). Since, in principle, \(\upepsilon_{\Vert }\) and \(\upepsilon_\perp \) can be independently controlled, R can take any value (and can even evolve during a mechanical test). Yet, we focus here on a few cases that are most relevant to our discussion. For pure shear deformation, defined by the absence of linear dilatational strain (\(\upepsilon_{\Vert }+2\upepsilon_\perp =0\)), we have \(R=1/2\). As plastic deformation in glasses is most sensitive to shearing,3 this value of R is expected to facilitate a more plastic response, see Figure 5c. For the unconstrained uniaxial tension loading geometry considered up to now, we have \(R=\upnu \le 1/2\); that is, R in this loading geometry is determined by a material property, quantified by \(\upnu \). Therefore, we see that reducing \(\upnu \) in the unconstrained loading configuration tends to increase the relative importance of tensile deformation (Figure 5a), which may facilitate a more brittle-like behavior, in qualitative agreement with the results of Figure 4d.
As R is in general not a material property, but can rather be controlled through the imposed loading geometry, one can use it to disentangle the roles of \(A_{\rm g}\) (or \(\upchi \)) (i.e., the role of soft defects) and of the loading geometry on the fracture toughness. To that aim, we performed constrained tension tests, where the transverse/lateral boundaries (perpendicular to the main tensile axis) are held fixed (i.e., \(\upepsilon_\perp =0\)). This case corresponds to \(R=0\), see Figure 5b and “Materials and methods” section for additional discussion. The loading geometry corresponding to \(R=0\) allows to eliminate the role of \(\upnu \) as a linear response coefficient that controls Poisson contraction. Consequently, we expect the fracture toughness in this case to be determined by \(A_{\rm g}\). Since for \(R=0\), which obviously favors tensile deformation, catastrophic failure is unavoidable, \(A_{\rm g}\) is expected to affect the value of the fracture toughness, not strictly a brittle-to-ductile transition. In particular, we expect iso-\(A_{\rm g}\) glasses to feature very similar toughness under constrained tension, despite having different \(\upnu \)’s, and the toughness to systematically increase with \(A_{\rm g}\) for the same glass cooled at different rates \(\dot{T}\).

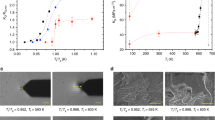
Disentangling the effect of soft defects and loading geometry on the toughness. (a) Stress–strain curves under constrained tension, for glasses prepared at a high quench rate \(\dot{T} = 0.02\) and different \(r_{\rm c}\)’s. See text and “Materials and methods” section for the exact definitions of \(\upsigma_{\Vert }\), \(\upepsilon_{\Vert }\) , and \(E_{\Vert }\). (b) The same as in panel (a), but for iso-\(A_{\rm g}\) glasses, featuring approximate collapse. (c) The Toughness (computed as the integral over the stress–strain curve and normalized by \(E_{\Vert }\), see text for details) vs. \(A_{\rm g}\). (d) The Toughness vs. \(\dot{T}\).
These predictions are tested in Figure 6, where we first show in panel (a) that different glasses (i.e., different \(r_{\rm c}\) values) feature rather large variability in their failure behavior under constrained tension for a fixed cooling rate \(\dot{T}\) (here we present stress–strain curves; a quantitative measure of the fracture resistance is presented in panels [c] and [d]). The discussion above predicts that if one repeats the calculations of Figure 6a for different glasses featuring nearly the same \(A_{\rm g}\), under the same constrained tension loading geometry (\(R=0\)), most of the variability in the failure behavior would be gone. The results of these calculations are presented in Figure 6b, where it is indeed observed that the stress–strain curves of iso-\(A_{\rm g}\) glasses featuring different \(\upnu \) values, approximately collapse, as predicted. These results should be compared to—and contrasted with—the results shown in Figure 3c obtained under unconstrained uniaxial tension. We stress that these results strongly suggest that once the geometrical Poisson contraction is eliminated (or more generally when R is prescribed), Poisson’s ratio \(\upnu \) does not play a major role in determining the toughness of glasses.
Another prediction discussed above is that the fracture toughness is expected to systematically increase with \(A_{\rm g}\) under constrained tension. In order to test this prediction, we quantify the fracture resistance through the “Toughness,”59 which is defined as the integral under the stress–strain curve up to failure (it has the dimensions of energy density, and should be distinguished from the “Fracture toughness” \(K_{\rm c}\),2 which has the dimensions of stress times the square root of length, see Supplementary Information). Note that the Toughness is usually employed for samples that do not contain an initial crack (as it obviously depends on the crack geometry and dimensions); here we do apply it to such samples, but as done throughout this work, the initial crack geometry and dimensions are strictly kept fixed (in the Supplementary Information we discuss the effect of varying the initial crack length, as well as of varying the system thickness). In Figure 6c, we plot the Toughness versus \(A_{\rm g}\) for our entire glass ensemble, calculated under constrained tension. As predicted, we observe systematic increase of the Toughness with \(A_{\rm g}\). Finally, we expect that the \(\dot{T}\) dependence of \(A_{\rm g}\), previously presented in Figure 1f, is fully and transparently mirrored in the dependence of the Toughness on \(\dot{T}\). This is strongly supported by the results shown in Figure 6d.
Discussion and conclusion
In this work, employing extensive atomistic simulations and recently developed concepts, we studied the physical origin of the failure resistance of glasses, and in particular the emerging brittle-to-ductile transitions. We showed that these are controlled by both the abundance of soft defects—as quantified by \(A_{\rm g}\), the prefactor of the universal \(\upomega^4\) vDOS of non-phononic excitations in glasses (and indirectly by \(\upchi \))—and by the loading geometry of the fracture test employed to extract the toughness. The loading geometry/configuration is shown to affect the relative magnitude of shear and tensile deformation experienced by the material near the initial crack, and consequently the emerging plastic dissipation, for a fixed \(A_{\rm g}\). Roughly speaking, \(A_{\rm g}\) controls the number of soft defects/STZs in a glass, and the loading geometry controls the fraction of soft defects/STZs being actually activated, and hence both affect plastic deformation and consequently the fracture toughness.
We find that only under a certain choice of loading geometry, where Poisson contraction can take place, Poisson’s ratio \(\upnu \) can be sensibly used to quantify the fracture toughness together with \(A_{\rm g}\) (or \(\upchi \)). These results suggest that brittle-to-ductile transitions in glasses are not controlled by a critical Poisson’s ratio, as previously proposed, and elucidate the physical role \(\upnu \) might play in affecting the fracture toughness of glasses.
It is important to note that our results also show that while varying the interatomic potential, in our case using the parameter \(r_{\rm c}\) as shown in Figure 1b, affects the fracture toughness, there exists no simple and direct relation between the particle-scale force–separation relation and the fracture toughness. In particular, one cannot read off the variation of the fracture toughness from just an isolated bond breaking process that is indicated by the interatomic potential. This is clearly demonstrated by Figure 6b, which shows that glasses with quite significantly different ranges of interatomic potentials fail in a similar manner if their \(A_{\rm g}\) is similar. That is, our results indicate that the fracture toughness is a collective, emergent property of glasses, which depends on the non-equilibrium self-organization of a glass during its formation.
Our findings thus provide basic insights into the physical origin of the failure resistance of glasses, and should serve as important input for theories that aim at predicting it. Such theories should include the number of soft defects, as quantified here by \(A_{\rm g}\), and its deformation-induced spatiotemporal evolution as important ingredients. Our findings also call for additional future investigations, along the lines we delineate next.
In this work, we employed an athermal (\(T = 0\)) and quasistatic (i.e., we approach the limit of vanishing deformation rates) glass-deformation protocol.31,60 While this choice is suitable for identifying structural and loading geometry effects on the fracture toughness, it completely suppresses thermal and rate effects, and might therefore introduce uncontrolled artifacts. It is obviously desirable to extend the present study to more physically realistic loading protocols that involve both finite temperatures and strain rates.
Equally important for future work are mechanical tests on computer glasses that trace out the role of sample size and thickness in determining the failure resistance to failure; in this work we employed glassy slabs of small thickness (see “Materials and methods” section), hence systematically studying possible thickness effects is in place. In the Supplementary Information, we show that increasing the glass in-plane dimensions—other than the slab thickness—does not appear to affect the fracture behavior. In addition, as our results were obtained for an initial crack of fixed geometry and dimensions (but see also Supplementary Information), it would be important in future work to sufficiently increase both the system size and the initial crack size to obtain quantitative results that are entirely independent of both.
We selected to study a rather flexible computer glass model system—introduced first in Reference 49—that features a very large variability of glasses’ mechanical properties.29,50 While we are unable at this point to single out a particular deficiency of this model, the employed pairwise interactions might be too simple to capture the emergent effects of more complex and realistic particle interactions of laboratory glasses in their entirety. For example, the Poisson ratio of our computer glasses does not fall below \(\upnu = 1/4\), while other (network) computer glasses (e.g., those employed in Reference 6) can feature \(\upnu < 1/4\). More generally, it would be important to extend the present study to more realistic interatomic interaction potentials (e.g., that include covalent interactions) and to multi-component glasses.
At the same time, the power of computer simulations allows us to probe and measure generally applicable quantifiers of mechanical disorder such as \(A_{\rm g}\) and \(\upchi \); while the former does not appear to be directly accessible experimentally, the latter could be—in principle—indirectly accessed in future experiments via transverse sound attenuation measurements at wavenumbers \(\lesssim 1\)nm\(^{-1}\), or via other experimental techniques.61,62 As new and more informative quantifiers of STZ densities are being developed (e.g., References 21, 36, and 63), we cannot rule out that more informative dimensionless quantifiers of mechanical disorder can shed further light on the relation between mechanical disorder and plastic deformability, and hence on the fracture toughness.
In our analysis of the abundance of STZs as captured by \(A_{\rm g}\), we have not considered the effect of geometric/mechanical coupling of STZs to different deformation modes. In Reference 29 it was shown that varying \(r_{\rm c}\) can dramatically affect the ratio of dilatational to shear eigenstrains associated with STZs viewed as Eshelby’s inclusions. These changes in the intrinsic geometric properties of soft defects can potentially play a role in the failure of glasses. For example, the coupling of soft defects to different deformation modes can affect the susceptibility to cavitation, which is in fact observed in our simulations (but will be discussed elsewhere) as predicted in Reference 7.
Finally, our work constitutes a step toward a quantitative understanding of deformation-induced failure in disordered solids. Future investigations should aim at better understanding the role of deformation-induced rejuvenation of glassy structures—going beyond \(A_{\rm g}\) that characterizes the initial glass structure—in controlling the ductile or brittle nature of failure. That is, plastic deformation itself could be limited—in some cases—in its ability to generate new soft defects that facilitate further plastic flow in the material, as typically happens within shear bands.64
Materials and methods
Here, we provide details about the computer glass models employed, about the methods used to deform the glass samples, and about the observables considered.
Computer glass models
We employ a glass model put forward in Reference 49; in this model, particles of equal mass m interact via the following pairwise potential
where \(\upvarepsilon \) is a microscopic energy scale; \(x_{{\rm min}},x_{\rm c}\) are the (dimensionless) locations of the minimum of the Lennard–Jones potential and modified cutoff, respectively; and the \(\uplambda_{ij}\)’s are the length parameters, described further next. We express the dimensionless cutoff \(x_{\rm c}\) in terms of \(x_{{\rm min}} = 2^{1/6}\), for simplicity, by defining \(r_{\rm c} \equiv x_{\rm c}/x_{{\rm min}}\). \(r_{\rm c}\) serves as one of the key control parameters in our study; we refer readers to References 29 and 50 for a comprehensive study of the elastic properties of glasses formed with this model, under variations of \(r_{\rm c}\) and of glass preparation protocol. The coefficients \(a,b,\{c_{ 2\ell }\}\) are chosen such that the attractive and repulsive parts of \(\upvarphi \), and its first two derivatives, are continuous at \(x_{{\rm min}}\) and at \(x_{\rm c}\), see Table I for the coefficients’ numerical values. Unless specified otherwise, we employ simulational units, where energies are expressed in terms of \(\upvarepsilon \), temperature in terms of \(\upvarepsilon /k_{\rm B}\), lengths in terms of  (see further discussion next), elastic moduli in terms of
(see further discussion next), elastic moduli in terms of  , and times in terms of
, and times in terms of  .
.
We employ the pairwise potential in Equation (1) in two distinct protocols/procedures for creating glasses. For the first procedure, we follow the conventional computer glass formation route: high-temperature equilibrium liquid configurations at pressure \(P = 1\) are generated at an initial temperature \(T_{{\rm initial}} = 0.7\). Those equilibrium configurations are then quenched at fixed zero pressure \(P = 0\), and at a constant cooling rate \(\dot{T}\) (as specified in the figure legends) until a temperature \(T_{\rm final} = 0.05\) is reached. Any residual heat is subsequently removed using a standard energy minimization algorithm. For this protocol, we employ a 50:50 binary mixture of ‘large’ (l) and ‘small’ (s) particles, and fix the effective size parameters  , and
, and  for small–small, small–large, and large–large interactions, respectively.
for small–small, small–large, and large–large interactions, respectively.
Glasses formed with the second procedure—introduced next—are referred to as fluctuating-size-particles (FSP) glasses. They were created by employing the algorithm put forward in Reference 40; within this algorithm, an augmented potential energy is employed for creating glasses with very high variability of their mechanical stability. This variability is achieved during glass formation by allowing particle sizes \(\uplambda_i\) to fluctuate about a preferred effective size \(\uplambda_i^{(0)}\) at an energetic penalty determined by a potential of the form
where the stiffness \(k_\uplambda \) constitutes the main control parameter of FSP glasses. Notice that this form is slightly different from the effective size potential used in Reference 40; the latter turns out to be unstable for small \(k_\uplambda \) and small confining pressures. We set the preferred sizes of half the particles at  (as before , forms the microscopic units of length), the other half at
(as before , forms the microscopic units of length), the other half at  , and used the convention \(\uplambda_{ij} = \uplambda_i +\uplambda_j\). Crucially, once a glass is created with the FSP algorithm, all subsequent analyses and mechanical tests are performed under fixed particle sizes \(\uplambda_i,\) namely using the exact same pairwise potential as given by Equation (1). Importantly, local minima (glassy states in mechanical equilibrium) of the augmented potential also constitute local minima of the potential given by Equation (1). Finally, we note that the particles of FSP glasses are polydispersed in size, since during glass formation the effective particle sizes fluctuate, see Reference 40 for further discussion and details. We employ the FSP algorithm to create zero pressure glasses, starting from high-temperature liquid states and minimizing the augmented potential using a variety of stiffnesses \(k_\uplambda \) (and various values of \(r_{\rm c}\)) as reported in the figure legends. In general, decreasing the stiffness parameter \(k_\uplambda \) results in stiffer glasses featuring less mechanical fluctuations.
, and used the convention \(\uplambda_{ij} = \uplambda_i +\uplambda_j\). Crucially, once a glass is created with the FSP algorithm, all subsequent analyses and mechanical tests are performed under fixed particle sizes \(\uplambda_i,\) namely using the exact same pairwise potential as given by Equation (1). Importantly, local minima (glassy states in mechanical equilibrium) of the augmented potential also constitute local minima of the potential given by Equation (1). Finally, we note that the particles of FSP glasses are polydispersed in size, since during glass formation the effective particle sizes fluctuate, see Reference 40 for further discussion and details. We employ the FSP algorithm to create zero pressure glasses, starting from high-temperature liquid states and minimizing the augmented potential using a variety of stiffnesses \(k_\uplambda \) (and various values of \(r_{\rm c}\)) as reported in the figure legends. In general, decreasing the stiffness parameter \(k_\uplambda \) results in stiffer glasses featuring less mechanical fluctuations.
Using the two procedures/protocols previously described, we created two sets of ensembles: one set was created for extracting the micromechanical properties of each ensemble as reported in Figure 1 for glasses formed with a finite cooling rate, and in Figure 4 for glasses formed using the FSP protocol. For these calculations, we prepared between 256 and 5000 glasses of \(N = 4096\) particles (except for lowest cooling rate \(\dot{T} = 2 \times 10^{-5}\) for which \(N = 2197\)). The second set of ensembles—prepared for our mechanical tests—were larger, rectangular glass slabs of dimensions \(L_x \times L_y \times L_z\), with \(L_x=L_y=L_0=60a_0\) and \(L_z=15a_0\) (recall that \(a_0 \equiv (V/N)^{1/3}\)), containing \(N = 54{,}000\) particles in total.
Mechanical loading simulations
Mechanical loading is carried out via athermal quasistatic simulations, i.e., zero strain rate and temperature. For both unconstrained uniaxial tension and constrained tension (see also Figure 5 and “Mechanical and structural observables” next), the glass is affinely deformed by imposing an extensional strain along the y-axis (regarded as the parallel direction in the text). We define the extensional strain as \(\upepsilon_{\Vert }=(L-L_0)/L_0,\) where L and \(L_0\) are the current and initial box length along \(\mathbf{e}_y,\) respectively. Particle positions are changed according to \(y_i \rightarrow y_i+\delta \upepsilon_{\Vert }y_i,\) where the strain step \(\updelta \upepsilon_{\Vert }\) is fixed at each step such that the accumulated extensional strain \(\upepsilon_{\Vert }\) increases by \(10^{-3}.\) Subsequently, we minimize the potential energy U, where periodic boundary conditions are applied in all directions. For constrained tension, we employ the conventional conjugate gradient algorithm. For unconstrained uniaxial tension, we combine the FIRE minimization algorithm65 with the Berendsen barostat. The latter keeps the stress in the transverse directions (i.e., along the x- and z-axis, zero, with a time constant \(\uptau_{\rm Ber}=10.0\)). For both loading geometries, the minimization is stopped once the ratio between the typical gradient of the potential and the typical interparticle force drops below \(10^{-10}.\) During each simulations, and closely following Reference 3, we monitor the non-affine part of the plastic deformation based on the commonly used \(D^2_{\rm min}\) field3 between the initial configuration (\(\upepsilon_{\Vert }=0\)) and the current state.
Mechanical and structural observables
The potential energy of our glasses is given by \(U = \sum_{i<j}\upvarphi_{ij}(r_{ij}),\) where the pairwise potential we employed is described in Equation (1). As we focus on athermal conditions, the shear modulus is defined as66
where
is the Hessian matrix of the potential U, and \({{\varvec{x}}}\) denotes particle coordinates. The latter are considered to transform via \({{\varvec{x}}} \rightarrow \varvec{H}(\upgamma )\cdot {{\varvec{x}}}\) with the parameterized shear transformation
The pressure is given by

where  = 3 is the dimension of space, and \(\upeta \) is the isotropic dilatational strain that parameterizes the suitable transformation of coordinates \({{\varvec{x}}} \rightarrow \varvec{H}(\upeta )\cdot {{\varvec{x}}}\) as
= 3 is the dimension of space, and \(\upeta \) is the isotropic dilatational strain that parameterizes the suitable transformation of coordinates \({{\varvec{x}}} \rightarrow \varvec{H}(\upeta )\cdot {{\varvec{x}}}\) as
The athermal bulk modulus  is given by
is given by

With the definitions of the shear and bulk moduli in hand, the Poisson’s ratio \(\upnu \) of a 3D solid is given by
As previously explained (see “Mechanical loading simulations” section) and in the main text, we employed two different types of loading geometries, namely unconstrained uniaxial tension and constrained tension (Figure 5). In the former, uniaxial tension of magnitude \(\upsigma_{\Vert }\) is applied, while keeping the transverse stresses (in the two perpendicular directions) zero (i.e., \(\upsigma_{\perp } = 0\)). The resulting extensional strain \(\upepsilon_{\Vert }\) satisfies \(\upsigma_{\Vert }=E\upepsilon_{\Vert},\) where \(E=2\upmu (1+\upnu )\) is the conventional Young’s modulus. In this loading geometry, the biaxiality ratio is set by Poisson’s ratio (i.e., \(R=-\upepsilon_\perp /\upepsilon_{\Vert }=\upnu\)).
In the latter case, i.e., in the constrained tension loading configuration (Figure 5), the transverse boundaries (perpendicular to the applied tension direction) are held fixed (i.e., \(\upepsilon_\perp =0\)), and consequently the transverse stresses \(\upsigma_{\perp }\) are no longer zero (in fact, they are tensile, for example, \(\upsigma_{\perp } > 0\)). Note that since \(\upsigma_{\perp } \ne 0\) (i.e., the resulting state of stress is no longer uniaxial [though uniaxial stress \(\upsigma_{\Vert } > 0\) is applied], we term this loading geometry ‘constrained tension,’ omitting ‘uniaxial’). In this loading geometry, one can define two different moduli (linear response coefficients) \(E_{\Vert }\) and \(E_{\perp }\), according to \(\upsigma_{\Vert }=E_{\Vert }\upepsilon_{\Vert }\) and \(\upsigma_\perp =E_\perp \upepsilon_\perp.\) Using Hooke’s Law, one finds
These expressions are verified against numerical simulations in the Supplementary Information. Note that \(E_{\Vert }(\upmu ,\upnu ) \ge E(\upmu ,\upnu )\) for every \(\upmu \) and \(\upnu, \) and that in this case we have a zero biaxiality ratio (i.e., \(R=-\upepsilon_\perp /\upepsilon_{\Vert }=0\)).
Quantifiers of mechanical disorder
In our work, we consider two dimensionless quantifiers of mechanical disorder. The first quantifier is defined as
where \(\Updelta \upmu \) is the ensemble-standard-deviation of the shear modulus \(\upmu \) (of glasses created with the exact same protocol), N is the system size, and \(\langle \upmu \rangle \) denotes the ensemble-average shear modulus. \(\upchi \) has been studied in Reference 29 under variations of glasses’ interparticle interaction potential, and under different glass annealing protocols in References 39 and 51.
The second quantifier of mechanical disorder considered in our work is the prefactor \(A_{\rm g}\) of the non-phononic spectrum of a glass, which is of the form \(\mathcal{D}(\upomega ) = A_g\upomega^4\), independent of spatial dimension25 or microscopic details.26 The latter is obtained by performing a partial diagonalization of the Hessian matrix \(\varvec{\mathcal {H}}\), defined in Equation (4), and calculated for each member of our glass ensembles, to obtain the eigenfrequencies \(\upomega_\ell \) that solve the eigenvalue problem \(\varvec{\mathcal {H}}\cdot \varvec{\psi }_\ell = \upomega^2_\ell \,\varvec{\psi }_\ell \) (all masses are all set to unity). We then histogram the eigenfrequencies for each glass ensemble, to obtain their distribution \(\mathcal{D}(\upomega )\) over the frequency axis. Importantly, we note that the scaling form of \(\mathcal{D}(\upomega ) \sim \upomega^4\) is most readily observable in glasses of sizes small enough to suppress the otherwise-dominant phononic waves that emerge in the low-frequency spectrum of any elastic solid, as explained in detail in Reference 19.
References
J.S. Harmon, M.D. Demetriou, W.L. Johnson, M. Tao, Appl. Phys. Lett. 90, 131912 (2007)
B. Lawn, Fracture of Brittle Solids (Cambridge University Press, Cambridge, 1993)
M.L. Falk, J.S. Langer, Phys. Rev. E 57, 7192 (1998)
J.J. Lewandowski, W.H. Wang, A.L. Greer, Philos. Mag. Lett. 85, 77 (2005)
S. Madge, D. Louzguine-Luzgin, J. Lewandowski, A. Greer, Acta Mater. 60, 4800 (2012)
Y. Shi, J. Luo, F. Yuan, L. Huang, J. Appl. Phys. 115, 043528 (2014)
C.H. Rycroft, E. Bouchbinder, Phys. Rev. Lett. 109, 194301 (2012)
M. Vasoya, C.H. Rycroft, E. Bouchbinder, Phys. Rev. Appl. 6, 024008 (2016)
J. Ketkaew, W. Chen, H. Wang, A. Datye, M. Fan, G. Pereira, U.D. Schwarz, Z. Liu, R. Yamada, W. Dmowski, M.D. Shattuck, C.S. O’Hern, T. Egami, E. Bouchbinder, J. Schroers, Nat. Commun. 9, 3271 (2018)
J. Sethna, Statistical Mechanics: Entropy, Order Parameters, and Complexity, vol. 14 (Oxford University Press, Oxford, 2006)
D. Coslovich and G. Pastore, J. Chem. Phys. 127, 124504 (2007)
H. Tong, H. Tanaka, Phys. Rev. Lett. 124, 225501 (2020)
C.P. Royall, S.R. Williams, Phys. Rep. 560, 1 (2015)
L. Wang, A. Ninarello, P. Guan, L. Berthier, G. Szamel, E. Flenner, Nat. Commun. 10, 26 (2019)
C. Rainone, E. Bouchbinder, E. Lerner, Proc. Natl Acad. Sci. U.S.A. 117, 5228 (2020)
B.B. Laird, H.R. Schober, Phys. Rev. Lett. 66, 636 (1991)
H.R. Schober, C. Oligschleger, Phys. Rev. B 53, 11469 (1996)
J. Ding, S. Patinet, M.L. Falk, Y. Cheng, E. Ma, Proc. Natl Acad. Sci. U.S.A. 111, 14052 (2014)
E. Lerner, G. Düring, E. Bouchbinder, Phys. Rev. Lett. 117, 035501 (2016)
H. Mizuno, H. Shiba, A. Ikeda, Proc. Natl Acad. Sci. U.S.A. 114, E9767 (2017)
D. Richard, G. Kapteijns, J.A. Giannini, M.L. Manning, E. Lerner, Phys. Rev. Lett. 126, 015501 (2021)
A. Moriel, Y. Lubomirsky, E. Lerner, E. Bouchbinder, Phys. Rev. E 102, 033008 (2020)
V.L. Gurevich, D.A. Parshin, H.R. Schober, Phys. Rev. B 67, 094203 (2003)
D.A. Parshin, H.R. Schober, V.L. Gurevich, Phys. Rev. B 76, 064206 (2007)
G. Kapteijns, E. Bouchbinder, E. Lerner, Phys. Rev. Lett. 121, 055501 (2018)
D. Richard, K. González-López, G. Kapteijns, R. Pater, T. Vaknin, E. Bouchbinder, E. Lerner, Phys. Rev. Lett. 125, 085502 (2020)
C. Rainone, P. Urbani, F. Zamponi, E. Lerner, E. Bouchbinder, SciPost Phys. Core 4, 008 (2021)
E. Bouchbinder, E. Lerner, C. Rainone, P. Urbani, F. Zamponi, Phys. Rev. B 103, 174202 (2021)
K. González-López, M. Shivam, Y. Zheng, M.P. Ciamarra, E. Lerner, Phys. Rev. E 103, 022605 (2021)
W. Ji, T.W.J. de Geus, M. Popović, E. Agoritsas, M. Wyart, Phys. Rev. E 102, 062110 (2020)
C. Maloney, A. Lemaître, Phys. Rev. Lett. 93, 195501 (2004)
A. Tanguy, B. Mantisi, M. Tsamados, EPL 90, 16004 (2010)
M.L. Manning, A.J. Liu, Phys. Rev. Lett. 107, 108302 (2011)
J. Rottler, S.S. Schoenholz, A.J. Liu, Phys. Rev. E 89, 042304 (2014)
L. Gartner, E. Lerner, Phys. Rev. E 93, 011001 (2016)
D. Richard, M. Ozawa, S. Patinet, E. Stanifer, B. Shang, S.A. Ridout, B. Xu, G. Zhang, P.K. Morse, J.-L. Barrat, L. Berthier, M.L. Falk, P. Guan, A.J. Liu, K. Martens, S. Sastry, D. Vandembroucq, E. Lerner, M.L. Manning, Phys. Rev. Mater. 4, 113609 (2020)
M. Tsamados, A. Tanguy, C. Goldenberg, J.-L. Barrat, Phys. Rev. E 80, 026112 (2009)
H. Mizuno, S. Mossa, J.-L. Barrat, Phys. Rev. E 87, 042306 (2013)
G. Kapteijns, D. Richard, E. Bouchbinder, E. Lerner, J. Chem. Phys. 154, 081101 (2021)
G. Kapteijns, W. Ji, C. Brito, M. Wyart, E. Lerner, Phys. Rev. E 99, 012106 (2019)
W. Schirmacher, Europhys. Lett. 73, 892 (2006)
W. Schirmacher, G. Ruocco, T. Scopigno, Phys. Rev. Lett. 98, 025501 (2007)
J. Schroers, W.L. Johnson, Phys. Rev. Lett. 93, 255506 (2004)
A. Castellero, S.D. Uhlenhaut, B. Moser, J.F. Löer, Philos. Mag. Lett. 87, 383 (2007)
G.N. Greaves, A. Greer, R.S. Lakes, T. Rouxel, Nat. Mater. 10, 823 (2011)
B. Deng, Y. Shi, J. Appl. Phys. 124, 035101 (2018)
G. Kumar, P. Neibecker, Y.H. Liu, J. Schroers, Nat. Commun. 4, 1 (2013)
Y.H. Liu, G. Wang, R.J. Wang, D.Q. Zhao, M.X. Pan, W.H. Wang, Science 315, 1385 (2007)
O. Dauchot, S. Karmakar, I. Procaccia, J. Zylberg, Phys. Rev. E 84, 046105 (2011)
K. González-López, M. Shivam, Y. Zheng, M.P. Ciamarra, E. Lerner, Phys. Rev. E 103, 022606 (2021)
K. González-López, E. Bouchbinder, E. Lerner, arXiv preprint (2020). arXiv:2012.03634
M. Falk, Phys. Rev. B 60, 7062 (1999)
D. Wang, D. Zhao, D. Ding, H. Bai, W. Wang, J. Appl. Phys. 115, 123507 (2014)
F. Yuan, L. Huang, J. Non-Cryst. Solids 358, 3481 (2012)
W. Li, Y. Gao, H. Bei, Sci. Rep. 5, 1 (2015)
E.Y. Lin, R.A. Riggleman, Soft Matter 15, 6589 (2019)
J. Ashwin, E. Bouchbinder, I. Procaccia, Phys. Rev. E 87, 042310 (2013)
E. Lerner, E. Bouchbinder, J. Chem. Phys. 148, 214502 (2018)
M.A. Meyers, K.K. Chawla, Mechanical Behavior of Materials (Cambridge University Press, Cambridge, 2008)
D.L. Malandro, D.J. Lacks, J. Chem. Phys. 110, 4593 (1999)
L. Huo, J. Zeng, W. Wang, C.T. Liu, Y. Yang, Acta Mater. 61, 4329 (2013)
F. Zhu, A. Hirata, P. Liu, S. Song, Y. Tian, J. Han, T. Fujita, M. Chen, Phys. Rev. Lett. 119, 215501 (2017)
Z. Schwartzman-Nowik, E. Lerner, E. Bouchbinder, Phys. Rev. E 99, 060601 (2019)
A. Barbot, M. Lerbinger, A. Lemaitre, D. Vandembroucq, S. Patinet, Phys. Rev. E 101, 033001 (2020)
E. Bitzek, P. Koskinen, F. Gähler, M. Moseler, P. Gumbsch, Phys. Rev. Lett. 97, 170201 (2006)
J.F. Lutsko, J. Appl. Phys. 65, 2991 (1989)
Acknowledgments
D.R. acknowledges support of the Simons Foundation for the “Cracking the Glass Problem Collaboration” Award No. 348126. E.L. acknowledges support from the NWO (Vidi Grant No. 680-47-554/3259). E.B. acknowledges support from the Ben May Center for Chemical Theory and Computation and the Harold Perlman Family.
Author information
Authors and Affiliations
Corresponding authors
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Richard, D., Lerner, E. & Bouchbinder, E. Brittle-to-ductile transitions in glasses: Roles of soft defects and loading geometry. MRS Bulletin 46, 902–914 (2021). https://doi.org/10.1557/s43577-021-00171-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/s43577-021-00171-8