
Abstract
In this paper, the proposed wavelet-based methodology is developed to identify and classify the High Impedance Fault (HIF) in the Power Distribution System (PDS). The planned technique is based on the combination of Ant Lion Optimizer (ALO) and Artificial Neural Network (ANN), which is performed to accurately isolate the HIF. The change in phase current waveforms caused by faults and normal switching events has been used in this methodology. In order to develop the method to detect high impedance arcing faults under the linear conditions. The faults are identified through the computation of the basic electric descriptions of current and voltage signals. From the voltage and current signals, the harmonic components also computed. From the voltage, current signals, the fault are identified and classified in the system which can be able to solve the problem in the system. The harmonics level also analyzed which also detected and able to correct it for enabling the stable operation in the system. ANN is an Artificial Intelligence (AI) method that applied for optimizing precise generation limits as blocking happened. The neural network contains two stages: training stage and testing stage. Here, the ALO algorithm is utilized to improve the performance of the ANN training process. ALO is a new nature-inspired algorithm mimicking the hunting behavior of ant lions. The design of Lifting Wavelet Transform (LWT) is suitable for the classification process. The main objective of ANN with the aid of the ALO algorithm is the detection and classification of the HIF in PDS and analyzed the delay time of different locations. From the evaluation of the proposed technique, the inputs and their corresponding outputs are noted. The performance of the work is implemented in MATLAB/Simulink platform and the presentation of this model is investigated on the basis of the two cases of analysis. The results show that the projected algorithm detects the HIFs accurately and compared with the existing methods ALO, GSA and ANN, and GA and Fuzzy, respectively.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the world of electricity necessitates of power are intensifying. This enlargement of demand stimulates a need for more power generation [1]. With the help of the distributed generators (DG) this can be worked out that is small scale generators placed close to users [2, 3]. By engaging the distribution scheme one among the elementary disputes facing utility and power customer personnel is the need to turn out to be well-known with and stay knowledgeable about problems dealing with power quality [4, 5]. These turbulences may be in the structure of voltage sag, swells, voltage imbalances, transients, interruptions and harmonics that can result in issues to the industries sorting from breaking down of equipment to appearance plant shutdowns [6, 7]. On the basis of that, one can come to an end that power quality is turning into more and more important to customers for two reasons follows: voltage quality levels are prejudiced by the augmented usage of dispersed generation and dissimilar electronic devices [8].
Sensitive electronic devices are strongly exaggerated using voltage quality [9, 10]. On the national level, these issues are engaged to stimulate smart grid policies [11]. In technology, this notion has been the solution of advanced development and regulation from dissimilar stakeholders who are disturbed with demand-side management, energy storage, and renewable energy sources [12]. For real-time data and power exchange, the smart grid engages advanced data and communications skills to progress the power system’s operations so as to wholly hold novel technologies of renewable generation [13]. Amongst others, the evolving notion of Smart Grids in electric power systems, Local Distribution Companies (LDCs) is progressively integrating, into their distribution systems, the employ of advanced metering and two-mode communications and automation skills [14]. Smart grid implementations can decline costs and make simpler frequent industrial requirements like power factor correction implementations, remote control of electrical machines and energy generation schemes [15]. In addition to technology innovations, one more important reason for the smart grid is to progress the services in power supply to users [16, 17].
A Smart Grid circuit can comprise monitoring devices at multiple locations, relying upon the size of the circuit and the number of users linked. The communication of all smart devices, utility or end-user owned, to a central information collection location that abridges access to all data improved [18]. The communication of all smart devices, utility or end-user owned, to a central data collection location that abridges access to all information recovered. Moreover, advanced control approaches, digital sensing and metering, advanced grid devices and Supervision Control and Data Acquisition (SCADA) scheme are some of the most significant technologies affianced in the implementation of the smart grid [19, 20].
The contribution of this research work is, ANN and ALO are engaged in recognizing and classifying the HIF. The MWT is engaged to gather the feature extraction from the voltage and current and ANN–ALO is engaged to categorize the HIFs. The detailed explanation of the proposed method is presented in Sect. 3. Previous to that, the current research works are presented in Sect. 2. The experimental results and conversation are quantified in Sect. 4. Concluding remarks are outlined in Sect. 5.
2 Related Research Work
In kinds of literature, a handful of research works are available that are on the basis of HIF issue valuation, working out, and controlling in power schemes. A few of them are reconsidered here.
Thomas et al. [21] have projected a technique to recognize the HIFs in the distribution system and segregate the faulty segment, to diminish downtime. This technique was on the basis of voltage measurements along the distribution feeder and uses the sequence constituents of the voltages. Three models of high impedance faults have been measured and the source side and load side breaking of the conductor have been deliberate in this article to capture a wide range of scenarios. The consequence of neutral grounding of the source side transformer was also accounted for in that study.
Chen et al. [22] have industrialized a detection criterion and features of the fault currents were extracted on the basis of WT coefficients. Furthermore, HIF arcing currents related to dissimilar types of contact surfaces were fashioned by experiments set up in the laboratory. Transformer magnetizing inrush currents and capacitor switching transients were also fashioned by experiment and simulation, correspondingly, to signify transient disturbances usually happened in the distribution network. The detection criterion was utilized to distinguish the HIF from other normal non-fault momentary events.
Gab et al. [23] have proposed an analytical impedance-based fault location scheme for distribution systems. The approach was based on voltage and current measurements extracted at only one-end feeding substations. The modal transformation was implemented to decompose the coupled three-phase equations due to mutual effects into decoupled ones, and hence directly calculating fault distance in each section without iterative processes. The proposed approach considers various aspects of distribution systems: intermediate loads along the feeder tapped laterals and sub-laterals at various nodes, time-varying loads, and unbalanced operations. This algorithm was extensively investigated on a typical real 11 kV distribution system, South Delta electricity sector, Egypt using the MATLAB environment. Different cases were studied considering various loading conditions, varied fault resistance values, and different fault types.
Dehghani et al. [24] have investigated a method of fault detection and classification in asymmetrical distribution systems with dispersed generation to detect islanding and perform protective action based on applying a combination of wavelet singular entropy and fuzzy logic. In this method, positive components of currents at common coupling points were decomposed to adjust detailed coefficients of wavelet transforms and singular value matrices and expected entropy values were calculated via the stochastic process. Indexes were defined based on the wavelet singular entropy in positive components and three-phase currents to detect and classify the fault. That protection scheme was put forward for fault detection and was investigated in different types of faults such as single-phase to ground, double-phase to ground, three-phase to ground and line to line in distribution lines in the presence of distributed generations, and different locations of faults were verified when the distributed generation was connected to the utility.
Santos et al. [25] have presented a transient-based algorithm for high-impedance fault identification on distribution networks. It uses the discrete wavelet transform to monitor high- and low-frequency voltage components at neither several points of the power system, being able to indicate the most likely area within which the disturbance has occurred, without requiring data synchronization nor the knowledge of feeder or load parameters. Solid faults, capacitor bank switching, and feeder energization were also simulated, considering the system with and without distributed generation. Obtained results show that the algorithm significantly reduces the search field of the high-impedance fault, reliably distinguishing it from other disturbances.
Koley et al. [26] have suggested and evaluated the effectiveness of a low cost, fast and reliable microcontroller-based protection scheme using a wavelet transform and ANN. The algorithm, based on the hardware co-simulation approach performs all the functions of transmission line protection i.e. fault detection/classification, fault zone/section identification and location estimation. The fault detection/classification and zone identification algorithms use the fundamental frequency current components to estimate a fault index. The fault location estimation module uses wavelet transform coefficients in hybridization with a parallel artificial neural network structure. For hardware implementation, an 8-bit ATmega microcontroller was used and interfaced with the simulated power system model using the Integrated Development Environment (IDE). The scheme is tested on a power system model of 400 kV, 50 Hz three-phase double circuit line with the source at both ends. The implementation of the approach on a low-cost microcontroller with the lesser execution time, makes the prototype ideal for implementation on a digital platform (digital relay), thus leading to financial viability and sustainability of the protection scheme.
Vianna et al. [27] have presented a methodology for detection and area location of HIF on unbalanced distribution systems. The method was called Quasi-Differential Zero Sequence Protection (PQDSZ) and it detects these faults by analyzing the current zero-sequence RMS value on a distribution feeder. The detection relies on a differential area, defined by two points of measurement. The data was sent to a control center, which analyses the relation between the received currents and sends an alarm if any problem was detected. A simulation system with the RTDS and real automation equipment was presented, in order to validate the PQDSZ.
Nikander et al. [28] have investigated enhanced methods for the identification and location of very high impedance one phase-to-earth fault in Medium-Voltage (MV) networks in order to improve the electrical safety and reduce the number and duration of outages to customers. The examination was restricted to neutral compensated and isolated MV systems which were the prevailing neutral treatment practices in Europe. The main target of the study was the development of the model for the identification and location of earth faults up to very high fault resistances. The method was technically applicable in actual use because it utilizes standard measurements available at all 110/20 kV primary substations. The major algorithm is based on the calculation of the fault resistance for every MV feeder.
Here, used lifting scheme of wavelet transform for the extracting the voltage, current signal because lifting scheme is having the following advantages over conventional wavelet transform technique such as it allows faster implementation of the wavelet transforms. It requires a half number of computations as compared to the traditional convolution-based discrete wavelet transform. This is very attractive for real-time low power applications. The lifting scheme allows a fully in-place calculation of the wavelet transform. In other words, no auxiliary memory is needed and the original signal can be replaced with its wavelet transform, Lifting scheme allows us to implement reversible integer wavelet transforms. In a conventional scheme, it involves floating-point operations, which introduces rounding errors due to floating-point arithmetic. While in the case of the lifting scheme perfect reconstruction is possible for loss-less compression. It is easier to store and process integer numbers compared to floating-point numbers, Lifting scheme allows us to implement reversible integer wavelet transforms. In conventional schemes, it involves floating-point operations, which introduces rounding errors due to floating-point arithmetic. While in the case of the lifting scheme perfect reconstruction is possible for loss-less compression. It is easier to store and process integer numbers compared to floating-point numbers. It can be used for irregular sampling. The many advantages are present in the LWT so selected to analyze or capture applicable information signals.
Many classifiers have been developed by the researchers to detect and classify the HIF in the system. Some of the classifiers are described in this section. The rule-based classifier [36], z-test classifier [37], Bayes-based classifier [38], the knowledge-based classifier [39], the genetic algorithm [40], decision trees [41], support vector machine [42, 43], Fuzzy inference [44, 45]. Though less studied and utilized, these classifiers could still demonstrate a high level of efficiency in detecting the HIF, if accompanied by appropriate measurement and analysis domain. The majority of the techniques used to detect active HIFs make use of signals generated by the electric arc (harmonic and non-harmonic components). However, the arc may vanish even before the detection system gathers enough information to confirm the fault. Passive faults do not present an electric arc. They are more hazardous to people since there is no indication of the energization condition of the conductor. Due to the presence of low or no current in HIF, the conventional overcurrent protection system normally fails to detect the same. Thus, it is a challenging issue to detect the HIF and isolate the feeder. Moreover, the modeling and the detection of HIF techniques are analyzed in below Sect. 3.
3 Structure of HIF Model in Distribution System
The modeling of most distribution system components is quite straightforward, including infinite source, transmission line, feeders, shunt capacitors, circuit breakers, and loads. Faults on power distribution feeders are difficult to detect using the conventional over-current, ground fault relays and some versions of distance relaying schemes. The most difficult model is HIF fault because most HIF phenomena involve arcing, which has not been accurately modeled so far. HIF is introducing highly nonlinear behavior. Stochastic nonlinear current has certain attributes in both transient and steady-state parts, which makes it identifiable. The HIF current has four most important and significant characteristics, which are known as build-up, shoulder, nonlinearity, and asymmetry [29]. Some previous researchers have reached an agreement that HIF is nonlinear and asymmetric, and modeling should include random and dynamic qualities of arcing. The demonstrating of a high impedance fault is illustrated in Fig. 1. It is consists of a nonlinear resistor, two diodes, and two dc sources that change amplitudes randomly every half cycle. Thus, some dynamics and randomness are represented. In overhead lines, HIFs may appear due to, for example, trees leaning against a conductor or when a conductor falls to the ground with high resistivity. These faults also develop when the load-side end of the broken conductor has an earth contact. Faults with covered conductors often have very high impedance. A broken overhead line pin insulator, cable terminal, or faulty surge arrester can also cause a HIF [30].

The modeling of HIF
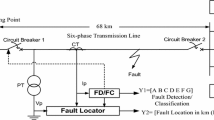
A fault location method for distribution systems to multi-source unbalanced systems using synchronize voltage and current measurement was reported. The method uses synchronized voltage and current measurements at the interconnection of DG units. Consider a fault of a HIF is occurring on an on a line section at a distance of g from the Source side, as illustrated in Fig. 2. There is a definite relation between the measurements at the sending end mean of source voltage, and the distance of fault from this end, for the faulted phase. On the source side, in the case of a distribution system, an equivalent generator is modeled with an equivalent reactance, at the sending end of the radial feeders. The varying number of generators in operation is modeled by an equivalent reactance on this bus.

The structure of the HIF fault location in PDS
The networks are simulated under linear and nonlinear loads with different loading conditions. The high impedance fault model is developed using anti-parallel diodes with non-linear resistance and DC source connected together for each phase. From the analysis, the initial and during HIF fault voltages are \(V_{q\left( k \right)}^{abc}\), \(V_{{q\left( {HIF} \right)}}^{abc}\) and the driving point impedance is \(Z_{qq}^{abc}\) the bus \(q\). The HIF fault occurs at point g, the HIF fault voltage \((V_{{g\left( {HIF} \right)}}^{abc} )\) is expressed as given Eq. (1),
where \(Z_{HIF}^{abc}\) is represents the HIF fault impedance, \(\,I_{HIF}^{abc}\) is denotes the HIF fault current. The voltage of bus \(q\) during the HIF fault is written in Eq. (2),
Similarly, the voltage at HIF fault point g during fault is expressed as Eq. (3),
Equation (1) is substituting in Eq. (3),
The HIF fault current is obtained as follow,
The value of \(I_{HIF}^{abc}\) is substituted in Eq. (2) and find out the value of the voltage at the bus \(q\), during the steady-state fault condition is expressed as,
where the voltage at a bus \((q)\) during fault is a function of initial voltage at buses \(q\) and g, driving point impedance of bus g, transfer impedance between buses \(q\) and g, and the fault impedance. By considering as a measurement at the sending end source, also obtain the distance of the faulty bus p from the sending end. The relation of the consideration is complex, once varying load conditions, fault resistance, and different types of faults on a feeder, are incorporated. This function would then correspond to numerous inputs mapping onto a single target, for example, a single line to a ground fault occurring at the same location on a feeder, but at different load levels. Such type of mapping is difficult to model using an algorithmic approach. Accordingly, this paper developed an algorithm for easily estimates the fault condition. Also, the main purpose of the work is to show that a very limited and reliable set of measurements can lead to a very accurate estimation of the fault location, considering the various practical aspects of the distribution system. The proposed procedure to recognize HIFs and in addition to segregate them from ordinary transient exchanging operations involves two phases. In the first stage, the present signs of the feeders, utilizing LWT, are broke down to get the applicable information signals [31].
3.1 Proposed Lifting Wavelet Transformation
Wavelet Transform is widely used in signal analysis, denoising and compression for its excellent locality in the time–frequency domain. There are numerous mother wavelets that can be used for DWT and CWT. The dilated or compressed form of mother wavelet implies scaling and the shifting of mother wavelet in the time domain is called translation. The wavelet transform can be analyzed in two ways. They are CWT and DWT. Among these two methods, the latter is extensively used because of the different reasons such as CWT requires a large number of scales to show the signal components, which makes it useless for online application, CWT is highly redundant transform as its wavelet coefficients contain more information than necessary, CWT provides the region where the fault occurs, but DWT localize the fault more efficient, DWT preserve all the information of the function with minimum number of wavelet coefficients, Computational time is faster for DWT analysis and Construction of CWT inverse is more difficult. To overcome above drawbacks LWT is selected in this proposed methodology for detection of HIF.
The mother wavelet defines the characteristics of the resulting transform. As a result, details of a particular application should be taken into consideration while selecting the mother wavelet. There are various architectures for implementing a filter bank i.e. Direct form, Polyphase, Lattice structure, and Lifting Scheme. A filter bank basically consists of a low pass filter and a high pass filter followed by decimators or expanders and delay elements. A lifting scheme is a very effective way to design a DWT. The Lifting scheme could be a new model for constructing bi-orthogonal wavelets. The most contrast with classical constructions is that they do not admit the Fourier Transform. In this approach, lifting will be accustomed to construct second generation wavelets. These wavelets are not essentially translating and dilates of one function. The latter we tend to talk over with as initial generation wavelets. Lifting wavelets belong to the category of second-generation wavelets that have peculiar advantages over initial generation wavelets. The lifting wavelets cut back the computing time associated memory necessities as they adopt an in-position realization of the wavelet transform. Conflicting traditional wavelets the computations for lifting wavelets achieve performance in integer domain instead of the real domain. The inverse method in lifting wavelets is the abolishing of the processes performed during the forward transformation. It consists of three steps: Split, Predict and Update. In the paper, the LFT is utilized to extract the features of HIF signals. The Lifting scheme is shown in Fig. 3.

Structure of LWT
3.1.1 First Process: Split Process
In the process, the signals are decomposed into even and odd components. Here, the samples are denoted as follows,
3.1.2 Second Process: Predict Process
The predict step uses a function that approximates the odd samples. It is also called dual lifting. It gives the interpolation of even samples. The differences between the approximation and the actual values replace the odd samples of the data set. It provides a high pass filtered component. The odd value is “predicted” from the even value, which is described by Eq. (8) given below
3.1.3 Third Process: The Update Process
In the update step, scaling is done to smooth the data and then added with even samples to provide low pass filtered values for the DWT. It is also called primal lifting. This result in a smoother input for the next step of the wavelet transform shown in Eq. (9)
Based on the above equation, once the update process is completed and the signal is well extracted. Then the extracted features are given to the input of the classifiers. It is one of the proposed solutions while working on non-stationary signals. It is widely used in signal analysis, denoising, and compression for its excellent locality in the time–frequency domain. This work includes feature extraction using wavelet transform and then classification using intelligent techniques. Therefore, the proposed technique of ALO-ANN is developed to detect the HIF of the distribution system. The performance of the proposed technique is explained in the underneath Sect. 3.1.
3.2 Implementation of the Proposed Method for HIF Detection
Due to the complexity of distribution systems and various uncertainty factors that are difficult to address using conventional techniques, a knowledge-based technique is applied for locating faults. In general, the technique requires information such as feeder measurement; substation and feeder switch status, the information provided by fault detection devices installed along with the feeders and atmospheric conditions. This information can be analyzed using artificial intelligence methods. In this work, the enhanced proposed techniques have been developed to detect and isolate both low and HIFs and improving the protection capability of the power system. Besides carrying out the detection, this methodology indicates in which phase the HIF occurred, e.g. phases a, b, or c, aiding the back elimination by the maintenance group [32]. In the pre-processing of signals to help locate and identify Single Line-to-Ground faults by using the proposed method. Among these approaches, the wavelet transform is one of the most frequently used algorithms to analyze the power signal. This paper presents a new design of the Lifting wavelet transform suitable for this classification process. In order to identify the type of fault, the proposed technique of an ANN and ALO based classifier is utilized. Here the ALO algorithm is utilized for selecting the optimal dataset and train the ANN for classifying the HIF in the power distribution system. In order to analyze, the earth's faults with high impedance earthing in electrical distribution networks are characterized. In the occurrence of disturbances, the traces of phase currents, voltages, neutral currents and voltages were measured using feeders.
3.2.1 ANN with Aid of ALO Algorithm for HIF Detection in PDS
In this section, the proposed ALO based ANN is used for the detection and classification of HIF in the power distribution system. An ANN is the most popular machine learning method, and it has been used for solving the classification and regression problems. ANN has a number of advantages, but the most popular one is its capability to learn from observing the dataset. In this way, an ANN is used as a tool to approximate random functions. These tools are responsible for assisting method estimation with the most effectiveness and ideality for obtaining solutions, while the distributions of computing or computing functions are being defined by them. In order to reach these solutions, an ANN takes a data sample instead of the whole set of data. ANNs have three interconnected levels. The first layer is the input neurons. These neurons send the data to the second layer, and the second layer, in turn, will send the outcome neurons to the third layer. The applicability of an ANN is for data classification and detection of HIF. However, for these purposes, a large set of data is needed. In order to optimize this type of data and overcome the ANN accuracy problem, and ALO has been proposed. The main goal of the paper is proposed by using the ALO algorithm to improve the ANN training data system.
3.2.1.1 Proposed ANN Algorithm
A specific ANN model can be defined using three important components: transfer function, network architecture, and learning rule. These components need to be defined according to the type of problem as they determine an initial set of weights and indicate how weights should be adapted during training to improve the performance. The most widely used type of ANN is the multilayer perceptron (MLP) feed-forward neural network. This type of ANN comprises neurons with weighted connections in different cascaded layers including an input layer, hidden layer(s) and output layer. The model of ANN needs to be trained. For the training of neural networks, several algorithms have been recommended. However, the Back-Propagation (BP) algorithm is the most robust technique for MLP networks. In BP feed-forward ANNs, artificial neurons are organized in layers and send their signals forward. Subsequently, the errors are propagated backward. Such a procedure is technically known as a learning or training procedure [33]. In the training process, the network is presented with a pair of patterns; an input pattern and the corresponding desired output pattern. The network computes its actual outputs, its weights, and a mathematical function model threshold. Afterward, the actual output is compared to the network outputs to conclude the output error. The obtained error is propagated back through the network and updates the individual weights. This process is named the backward pass. Through this procedure, both training and testing errors are reduced. The process is repeated until the error is converged to a defined level such as mean square error (MSE). However, an experimental database including a sufficient number of datasets is required to train the ANN model. A network with a structure that is more complex than required may overfit the training data. The fitness function in the training process is given as follows,
where \(L\) is represents the number of training samples, \(d_{i}^{k}\) and \(p_{i}^{k}\) it denotes the actual and desired output of the ith input when the kth training sample is used.
The detailed description of the ANN is included in this section. For developing the mathematical structures, ANNs are fine approaches with the capability to learn. Normally Neural network consists of two phases namely, training and testing phases. When the parameter is given as input to the neural network, the most excellent optimal set of the parameter is obtained as output in the testing phase. The ANN has an Input layer, hidden layer, and output layer. The training structure of the ANN is illustrated in Fig. 4. A pre-examined dataset is obtained from and it is used as the training dataset X for the neural network. The dataset X consists of input as transmission line congested power and the system output is the reschedule power of the generators. The dataset X can be represented as,

The structure of proposed ANN using an algorithm
3.2.1.2 Steps for Backpropagation Algorithm to Train the Neural Networks
Step 1: Initialize the weight of all the neurons of the network. The neuron weights of the hidden layer and the output layer are initiated in the particular interval \(\left[ {w_{\min } ,w_{\max } } \right]\). The hidden layer of the output layer weight is described as the \(\left( {w_{211} ,w_{212} ,.....w_{2nk} } \right)\).
Step 2: Determine the BP error by giving the training dataset X as input to the classifier as follows,
Target output \((d_{t\arg et} )\) and the network output out \((d_{OUT} )\) can be calculated as \(d_{OUT} = \left( {d_{0} \,,\,d_{1} \,,\,d_{2\,} \ldots ,d_{n - 1} } \right)\). The elements of \(d_{OUT}\) the can are determined from every output neuron of the network as follows,
Here, the input data of phase currents, voltages, neutral currents, and voltages applied to the ANN and \(n\) number of hidden layers. Then the outputs \(\alpha_{i} = \left\{ {\alpha_{1} ,\,\alpha_{2\,,\,} ....\alpha_{N} } \right\}\) are described as the following,
where \(N_{H\,}\) is the number of hidden neurons \(d_{OUT}\) is the output from jth output neuron and \(w_{ij}\) is the weight of the i-j link of the network and \(\alpha_{i}\) is the output of ith the hidden neurons. From the above equations, the term \(c\) is represented as an input variable. These equations are represented as the input and output layers. Then adjust the weight of all the neurons.
Step 3: Evaluate the change in weights based on the obtained BP error as follows,
where \(\eta\) is the learning rate, usually it ranges from 0.2 to 0.5.
Step 4: Determine the new weights is expressed as follows,
Until BP error gets reduced to the least value, repeat the process from step 2. The network training process can be improved by considering the proposed ALO algorithm. The network output is applied to the evaluation stage. The performance of the proposed ALO algorithm was explained in Sect. 3.2.2.
3.2.2 Enhance the ANN Train Process Using ALO
The ALO algorithm is inspired by the hunting of ants and other prey by the ant lions found in nature [34]. It is a population-based random search algorithm. In the ALO algorithm, ants are search agents that wander over the search space and ant lions dig pits in the ground to trap and consume the ants. The objective function to be optimized is modeled to reflect the hunting ability of the ant lion. The hunting of ant by antlion can be understood by observing their interactions. The different steps taken by the ant and ant lion during hunting are modeled by defining six operations for the ALO algorithm, which are explained later in this section. On the basis of these operations, the optimization model is built. To establish an analogy between the natural hunting phenomenon and the ALO algorithm, some guidelines are applied, which are: (a) ants take random walks around the search space. (b) Random walks are taken by all ant dimensions. (c) The ant lion traps influence the random walks of ants. (d) The size of traps built by the ant lions is proportional to their hunting ability/fitness. (e) The probability of catching ant is higher for ant lions having larger pits. (f) In each iteration, there are chances of an ant being caught by either the elite or some other fit ant lion. (g) To simulate the sliding of ant towards ant lion, the range of random walk is decreased adaptively. (h) When an ant is pulled by an ant lion under the sand and consumed, the ant lion becomes fitter than the ant and (i) the ant lion takes the position of the consumed ant. According to this paper, the ALO algorithm is implemented to improve the ANNs performance by adjusting the weight and bias values of ANNs. Whereas the ALO algorithm is performed as the global search optimization in order to detect the fault in PDS. The step procedure of the proposed algorithm is briefly explained as follows:
3.2.2.1 Bullet Creating Random Walks of Ants
Random walks are all based on the equation below:
where \(cumsum\) computes the cumulative sum, n is the maximum number of iterations, t shows the step of the arbitrary walk and r (t) is a stochastic function defined as follows
To keep the random walks within the search space, they are normalized using the succeeding equation
where \(\alpha_{i}\) the minimum of is the arbitrary walk of ith variable, \(\beta_{i}\) is the maximum of random walk in ith the variable, \(\gamma_{i}^{t}\) is the minimum of ith the variable at tth iteration, and \(\lambda_{i}^{t}\) indicates the maximum of ith the variable at ith iteration.
-
Trapping in Ant-lion’s Pits
Ant-lions’ traps influence the arbitrary walks of ants. To model this assumption mathematically, the equations proposed are:
$$\gamma_{i}^{t} = Antlion_{j}^{t} + \gamma^{t}$$(20)$$\lambda_{i}^{t} = Antlion_{j}^{t} + \lambda^{t}$$(21)where \(\gamma^{t}\) is the minimum of all variables of tth variable and \(\lambda^{t}\) is the maximum of all variables in tth an iteration.
-
Building Trap
In order to model the hunting capability of the antlion, a roulette wheel is used. The ALO algorithm needs to utilize a roulette wheel operator for picking ant lions according to their fitness during optimization. This method gives better probabilities to the fitter ant lions to catch ants.
-
Sliding Ants Towards Ant Lion
With the method proposed so far, ant lions are capable of constructing traps relative to their fitness and ants are required to move arbitrarily. However, ant lions shoot soil outward the mid of the pit once they understand that an ant is in the trap. This conduct slides down the trapped ant that is attempting to escape.
3.2.2.2 Catching Prey and Re-building the Pit
The last stage of hunting is when an ant reaches the bottom-most of the pit and is trapped in the antlion’s jaw. Then the antlion drags the ant inside the sand and consumes. For imitating this procedure, it is supposed that prey catching occurs when ants turn out to be fitter (go inside sand) than its analogous antlion. Then the ant lion updates its position by taking the position of the consumed ant, which is synonymous to ant lion rebuilding its pit to improve the chances of catching new prey. The following equation is offered in this regard:
where \(t\) shows the current iteration, \(Antlion_{j}^{t}\) shows the position of selected jth ant-lion at tth iteration and \(Ant_{j}^{t}\) indicates the position of ith ant at tth iteration.
-
Elitism
To preserve the best solution obtained at each stage, the position of the best (fittest) ant lion is saved as elite. Being the best, the elite ant lion is considered to influence the movement of each ant. The Elitism supposed that each ant random walks around a particular antlion by roulette wheel and the elite concurrently as follows
$$Ant_{i}^{t} = RM_{antlion}^{t} + R_{Elite}^{t} /2$$(23)where \(RM_{antlion}^{t}\) is the random walk around the antlion selected using the roulette wheel at tth iteration, \(R_{Elite}^{t}\) the random walk around the elite at tth iteration, and indicates the position of ith ant at tth iteration [35].
3.2.2.3 Pseudocodes of the ALO Algorithm
Step 1: Initialize a population of n ant-lions and ants at random.
Step 2: Evaluate the ant-lions and ants fitness.
Step 3: Locate the best ant-lions and suppose it is the elite.
Step 4: while the end criterion is not satisfied.
for each ant.
Choose an ant-lion utilizing the Roulette wheel.
Generate a random walk and normalize it.
Update the position of the ant.
end for
Compute the fitness of all ants.
Substitute an ant-lion with its comparing ant if the ant is fitter.
Update elite if an ant-lion gets fitter than the elite.
Step 5: end while
Step 6: Return elite
Based on the objective function, the ANN is optimally trained and gets the optimal outputs and the corresponding HIF in the power distribution system is calculated.
4 Results and Discussion
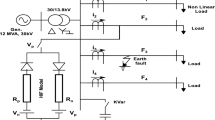
In this section, the investigation of this strategy with some unique areas and distinctive resistance esteem is tested. Its connected with Intel(R) Core(TM) i5 processor, 4 GB RAM and MATLAB/Simulink 7.10.0 (R2015a) stage. The Simulink model of the proposed framework is outlined in Fig. 5, which demonstrates the power framework associated with the HIF blame framework and the proposed control technique. The separated elements are the gathering of information for the deliberate flag which recognizes the deficiencies and classifies the divergent mistake and dissimilar positions. High impedance faults are usually generated when an overhead conductor of the electric power distribution system breaks and touches a high impedance surface such as sand and asphalt. These ground faults are dangerous because the magnitude of the fault current is usually lower than the pickup currents of overcurrent protective devices. As a consequence, most HIFs can last several hours or days while there is the power to be delivered to the fault point.

Simulation diagram of the proposed system
There is no obvious characteristic difference between the faulted and healthy phases under HIF. So the conventional relays are difficult to detect HIF. The proposed scheme can cope with this difficulty. To demonstrate the sensitivity of the relaying scheme, a three-phase-to-ground fault is selected as a simulation case whose fault-path resistance and fault location is set. The HIF flaws are arranged and the position is assessed in view of the proposed technique. The proposed method is the ALO based ANN calculation, which examines the mistake motion from the reference value and instantly measures the signal.
4.1 Performance Analysis of the Proposed Technique
For most occurring faults, overcurrent relays installed for distribution system protection can detect and cut off the supply to the feeder containing the fault. To the design of an enhanced protection technique which should be able to detect and isolate both high impedance faults improving thus the protection capability of the power system. HIF typically occurs when the conductors in distribution network break and touch the ground surface, or lean and touch a tree branch. This fault, with current magnitude close to the load current level, is not detectable by over-current relays. The proposed ALO based ANN technique is developed for detecting and classifying the HIF faults. Here, the ALO algorithm is used to train the ANN and the testing execution is enhanced in light of the backpropagation calculation. The HIF is occurring in the transmission line at various locations. The performance of the HIF fault detection using the proposed technique is compared with the other existing techniques like ALO, GSA and ANN, and GA and Fuzzy methods. In order to analyze the tow case of operation to investigate the various locations of faults by using the proposed method. The two cases of operation are,
The case I: At location 10 km analysis of HIF parameter
Case II: At location 25 km analyses of HIF parameters
The proposed strategy inspects the voltage, phase magnitude and current parameters of the power system with various locations and diverse fault conditions are examined. The parameters are measured from 10 to 25 km of the power distribution system. At the initial stage, the voltage and current flow through the PDS without fault condition are measured and shown in Fig. 6.

Performance analysis of reference a voltage and b current
After the fault condition, the variation of different parameters is analyzed based on the proposed method. Moreover, the performance of the proposed system is compared with the other existing techniques like ALO, GSA and ANN, and GA and Fuzzy, respectively. The execution of the proposed method depends looking into the issue thinks about which are displayed as follows.
4.2 The Case I: At Location 10 km Analysis of HIF Parameter
For the implementation of the fault condition, the simulation is done for the distribution system is analyzed and shown in figures. This system has identical feeders at the location is 10 km. The power distribution network is simulated and a HIF is introduced in phase A, Phase B, and Phase C, respectively.
At the point of a fault condition in 10 km and the parameters of voltage, current and magnitude are measured and represented in Figs. 7, 8 and 9, respectively. The current in fault condition at location 10 km has been shown. The HIF fault is measured from the variety of moment voltage flow and the reference voltage of the system. To demonstrate the adequacy of the proposed procedure the HIF is connected in various locations and in various fault conditions. The voltage waveform at the faulted point has distortions due to the HIF and arc. Ground contact at the source side and the contact at the load side are considered and results are obtained for the same. The three-stage current and voltage are assessed to demonstrate the proposed system proficiency. The proposed framework execution investigation in view of three-stage voltage is assessed in the above figures and the examination in light of the current is evaluated and assessed in the accompanying case segment.

Performance analysis of CURRENT in a phase A, b phase B and c phase C under fault condition

Performance analysis of a Phase A magnitude b phase B magnitude and phase A under fault condition from 10 km

Simulation results of a Phase A voltage and b phase B voltage under fault condition from 10 km
4.3 Case II: At Location 25 km Analyses of HIF Parameters
For HIF simulation, the voltage sensors along with switches are placed at the substation and at different distances from the substation. In case 2, HIF is introduced at distances of 25 km from the substation. For the two diode models, a graph is plotted for the fault at a distance of 25 km points 1 and 2 are located at the fault. Thus it is clear that the points located after the fault experience almost the same voltage drop. The HIF fault is analyzed at different parameters in three-phase conditions. At that point measured controlling parameters and the fault are distinguished and grouped by the identification. In Figs. 10, 11 and 12 respectively the three-stage voltage, current, magnitude and phase of the proposed framework and the fault is happened in a 25 km area and is shown.

Performance analysis of current in a Phase A and b Phase C at location 25 km

Performance analysis of a magnitude and b Phase A under fault condition

Simulation results of a Phase A voltage and b phase B voltage and c Phase C voltage under fault condition from 25 km
The transient phenomena produced by the different parameters of voltage, current, and magnitude appear in the three phases during a short period of time 0 to 0.2 s. High impedance fault is occurred in phase A of feeder 1, with a fault condition is analyzed. The fault location, arc voltage and inception time are considered to be 25 km, respectively. Therefore, to verify the methodology of the proposed technique, it is necessary to obtain the relevant data signals from the power system, under different possible operating conditions. This work introduces a hybrid strategy for HIF identification and arrangement on transmission lines. The proposed algorithm depends on the wavelet packet transform. The HIF recognition part depends on HIFs transient and enduring state mark of HIF. Along these transmission lines, the occurrence of a fault system is calculated by using the new method. The increasing or decreasing of the current values does not affect the results obtained by the method developed. This is due to the fact that the high-frequency part of the signal only appears during a very short period of time, at the instant of capacitor switching. In this case, the proposed methodology provides the ANN output data, is analyzed and shown in Table 1. From the table, the examination of the presentation of the classification for a unique technique is readied. They call attention to strategies that are endorsed for the number of cases has been under test circumstances and after that correct classification and classification, efficiency is proposed. Then the efficiency of the proposed technique is 98% and the existing technique is ALO is 93%, GSA-ANN technique is 95% and the GA-fuzzy technique is 86% respectively. Since the proposed strategy is high efficiency superior to the current techniques, for example, GA-Fuzzy, GSA-ANN method and ALO respectively. To build up the presentation of the anticipated method it can upgrade the quantity of the circumstances. From the overall analysis, the proposed method give betters results than the other techniques.
High impedance faults are quite usual in any distribution system and also they produce very low fault currents that may go undetected due to improper settings of the protection relays. Under such circumstances, the unknown function relating the measurements, during faults of varying fault impedances, to the corresponding targets of the fault locations has to be estimated by the ALO based ANN technique. From that output dataset, all feeders are under normal operation. As the outputs of the simulation are mainly considered the two issues namely the fault type, the fault impedance for such estimation to be successful. After the consideration, the fault type can be detected in the PDS.
5 Conclusion
This paper presents a proposed ANN and ALO based classifier for the detection of HIF in the power distribution system. The ALO algorithm is utilized for selecting the optimal dataset and train the ANN for classifying the HIF in the power distribution system. The process starts with a fault process and the application of LWT to the current signals. In this method, the input parameters are the voltage, current under various transient conditions. Finally, the state of a feeder is calculated according to the outputs of the neural network. The complete performance of the technique has been tested by its application to data under different conditions. Therefore, this method is performed in which the parameters of the HIF can be changed to test the detection methodology under different fault conditions and different locations. To verify the performance of the proposed method, two cases have been analyzed. The statistical measures are be analyzed such as accuracy for proving the effectiveness of the system. The model is implemented in Matlab/Simulink platform and their output performance is compared with the existing methods ALO, GSA and ANN, and GA and Fuzzy respectively. From the overall analysis, results show the method is reliable and accurate than other existing techniques.
Abbreviations
- HIF:
-
High impedance fault
- PDS:
-
Power distribution system
- AI:
-
Artificial intelligence
- LWT:
-
Lifting wavelet transform
- DG:
-
Distributed generators
- LDCs:
-
Local distribution companies
- SCADA:
-
Supervision control and data acquisition
- ANN:
-
Artificial neural network
- IDE:
-
Integrated development environment
- PQDSZ:
-
Quasi-differential zero sequence protection
- MV:
-
Medium-voltage
- ALO:
-
Ant lion optimizer
- MLP:
-
Multilayer perceptron
- BP:
-
Back-propagation
- MSE:
-
Mean square error
- \(V_{q\left( k \right)}^{abc}\) :
-
\(V_{{q\left( {HIF} \right)}}^{abc}\)HIF fault voltages
- \(Z_{qq}^{abc}\) :
-
Driving point impedance
- \(Z_{HIF}^{abc}\) :
-
HIF fault impedance
- \(\,I_{HIF}^{abc}\) :
-
HIF fault current
- \(V_{{g\left( {HIF} \right)}}^{abc}\) :
-
Voltage HIF fault point g
- \(F\left( S \right)\) :
-
Fitness function
- \(\alpha_{i} = \left\{ {\alpha_{1} ,\,\alpha_{2\,,\,} ....\alpha_{N} } \right\}\) :
-
ANN output
- \(N_{H\,}\) :
-
Number of hidden neurons
- \(d_{OUT}\) :
-
Output from jth output neuron
- \(w_{ij}\) :
-
Weight of i–j link of the network
- \(\alpha_{i}\) :
-
Output of ith the hidden neurons.
- \(c\) :
-
Input variable
- \(\eta\) :
-
Learning rate
- \(\gamma^{t}\) :
-
Minimum of all variable of tth variable
- \(\lambda^{t}\) :
-
Maximum of all variables in tth an iteration
- \(t\) :
-
Current iteration
- \(Antlion_{j}^{t}\) :
-
Position of selected jth ant-lion at tth iteration
- \(Ant_{j}^{t}\) :
-
Position of ith ant at tth iteration
- \(RM_{antlion}^{t}\) :
-
Random walk around the antlion selected using the roulette wheel at tth iteration
- \(R_{Elite}^{t}\) :
-
Random walk around the elite at tth iteration
References
Bisht T (2012) Power quality in grid with distributed generation. Int J Trends Econ Manag Technol 1:6
Chandrasekaran K, Vengkatachalam PA, Karsiti MN, Rama Rao KS (2009) Mitigation of power quality disturbances. Int J Theor Appl Inf Technol 20:105–116
Polajzer B, Stumberger G, Dolinar D (2015) Detection of voltage sag sources based on the angle and norm changes in the instantaneous current vector written in Clarke’s components. Int J Electr Power Energy Syst 64:967–976
Moreno-Munoz A, de-la-Rosa JJG, Lopez-Rodriguez MA, Flores-Arias JM, Bellido-Outerinoa FJ, Ruiz-de-Adanac M (2010) Improvement of power quality using distributed generation. Int J Electr Power Energy Syst 32:1069–1076
Prodanovic M, Green TC (2006) High-quality power generation through distributed control of a power park microgrid. IEEE Trans Ind Electron 53(5):1471–1482
Khadem SK, Basu M, Conlon M (2012) Integration of UPQC for power quality improvement in distributed generation network—a review. Int J Emerg Electr Power Syst 13:1
Vaimann T, Niitsoo J, Kivipold T, Lehtla T (2012) Power quality issues in dispersed generation and smart grids. Elektron IR Elektrotechn 18(8):23–26
Janjic A, Stajic Z, Radovic I (2011) Power quality requirements for the smart grid design. Int J Circ Syst Signal Process 5:6
Amin M (2004) Balancing market priorities with security issues. IEEE Trans Power Energy Mag 2(4):30–38
Nafisi H, Agah SMM, Askarian Abyaneh H, Abedi M (2016) Two-stage optimization method for energy loss minimization in micro grid based on smart power management scheme of PHEVs. IEEE Trans Smart Grid 7(3):1268–1276
Vasundhara V, Khanna R, Kumar M (2013) Improvement of power quality by UPQC using different intelligent controls: a literature review. Int J Recent Technol Eng 2(1):173–177
Roncero JR (2008) Integration is key to smart grid management. Int J Smart Grids Distrib 20:1–4
Lin S-Y, Chen J-F (2013) Distributed optimal power flow for smart grid transmission system with renewable energy sources. Int J Energy 56:184–192
Paudyal S, Canizares CA, Bhattacharya K (2011) Optimal operation of distribution feeders in smart grids. IEEE Trans Ind Electron 58(10):4495–4503
Kabalci E, Kabalci Y, Develi I (2012) Modelling and analysis of a power line communication system with QPSK modem for renewable smart grids. Int J Electr Power Energy Syst 34:19–28
Hashemi-Dezaki H, Askarian-Abyaneh H, Haeri-Khiavi H (2016) Impacts of direct cyber-power interdependencies on smart grid reliability under various penetration levels of micro turbine/wind/solar distributed generations. IET Trans Gener Transm Distrib 10(4):928–937
St Leger A, James J, Frederick D (2012) Smart grid modeling approach for wide area control applications. IEEE J Power Energy Soc Gener Meet
Brenna M, Faranda R, Tironi E (2009) A new proposal for power quality and custom power improvement: OPEN UPQC. IEEE Trans Power Deliv 24(4):2107–2116
Bollen M (2011) Adapting electricity networks to a sustainable–smart metering and smart grids. Int J Swed Energy Mark Inspect 20:1–115
Zamora-Cardenas EA, Fuerte-Esquivel CR, Pizano-Martinez A, Estrada-Garcia HJ (2016) Hybrid state estimator considering SCADA and synchronized phasor measurements in VSC-HVDC transmission links. Int J Electr Power Syst Res 133:42–50
Thomas MS, Bhaskar N, Prakash A (2016) Voltage based detection method for high impedance fault in a distribution system. Int J Inst Eng 97(3):413–423
Chen J, Phung T, Blackburn T, Ambikairajah E, Zhang D (2016) Detection of high impedance faults using current transformers for sensing and identification based on features extracted using wavelet transform. IET Trans Gener Transm Distrib 10(12):2990–2998
Gabr MA, Ibrahim DK, Ahmed ES, Gilany MI (2017) A new impedance-based fault location scheme for overhead unbalanced radial distribution networks. Int J Electr Power Syst Res 142:153–162
Mo Dehghani MH, Khooban TN (2016) Fast fault detection and classification based on a combination of wavelet singular entropy theory and fuzzy logic in distribution lines in the presence of distributed generations. Int J Electr Power Energy Syst 78:455–462
Santos WC, Lopes FV, Brito NSD, Souza BA (2017) High-impedance fault identification on distribution networks. IEEE Trans Power Deliv 32(1):23–32
Koley E, Kumar R, Ghosh S (2016) Low cost microcontroller based fault detector, classifier, zone identifier and locator for transmission lines using wavelet transform and artificial neural network: a hardware co-simulation approach. Int J Electr Power Energy Syst 81:346–360
Vianna JTA, Araujo LR, Penido DRR (2016) High impedance fault area location in distribution systems based on current zero sequence component. IEEE Latin Am Trans 14(2):759–766
Nikander A, Jarventausta P (2017) Identification of high-impedance earth faults in neutral isolated or compensated MV networks. IEEE Trans Power Deliv 32(3):1187–1195
Mahari A, Seyedi H (2015) High impedance fault protection in transmission lines using a WPT-based algorithm. Int J Electr Power Energy Syst 67:537–545
Sheng Y, Rovnyak SM (2004) Decision tree-based methodology for high impedance fault detection. IEEE Trans Power Deliv 19(2):533–536
Tonelli-Neto MS, Guilherme J, Decanini MS, Lotufo ADP, Minussi CR (2017) Fuzzy based methodologies comparison for high-impedance fault diagnosis in radial distribution feeders. IET Trans Gener Trans Distrib 11(6):1557–1565
Dubey HM, Pandit M, Panigrahi BK (2016) Ant lion optimization for short-term wind integrated hydrothermal power generation scheduling. Int J Electr Power Energy Syst 83:158–174
Thukaram D, Khincha HP, Vijaynarasimha HP (2005) Artificial neural network and support vector machine approach for locating faults in radial distribution systems. IEEE Trans Power Deliv 20(2):710–721
Momeni E, Armaghani DJ, Hajihassani M, Amin MFM (2015) Prediction of uniaxial compressive strength of rock samples using hybrid particle swarm optimization-based artificial neural networks. Int J Meas 60:50–63
Baqui I, Zamora I, Mazon J, Buigues G (2011) High impedance fault detection methodology using wavelet transform and artificial neural networks. Int J Electr Power Syst Res 81:1325–1333
NengLing T, JiaJia C (2008) Wavelet-based approach for high impedance fault detection of high voltage transmission line. Eur Trans Electr Power 18(1):79–92
Balser S, Clements K, Lawrence D (1986) A microprocessor-based technique for detection of high impedance faults. IEEE Trans Power Deliv 1(3):252–258
Sedighi A-R, Haghifam M, Malik O, Ghassemian M-H (2005) High impedance fault detection based on wavelet transform and statistical pattern recognition. IEEE Trans Power Deliv 20(4):2414–2421
Russell BD (1990) Computer relaying and expert systems: new tools for detecting high impedance faults. Electr Power Syst Res 20(1):31–37
Sedighi A-R, Haghifam M-R, Malik O (2005) Soft computing applications in high impedance fault detection in distribution systems. Electr Power Syst Res 76(1–3):136–144
Samantaray SR, Dash PK (2010) High impedance fault detection in distribution feeders using extended Kalman filter and support vector machine. Eur Trans Electr Power 20(3):382–393
Livani H, Evrenosoglu C (2014) A machine learning and wavelet-based fault location method for hybrid transmission lines. IEEE Trans Smart Grid 5(1):51–59
Sahoo S, Baran ME (2014) A method to detect high impedance faults in distribution feeders. In: T D conference and exposition. 2014 IEEE PES, pp 1–6
Sulaiman M, Tawafan A, Ibrahim Z (2012) High impedance fault detection on power distribution feeder. Int Rev Modell Simul 5(5):2197–2204
Sulaiman M, Tawfan A, Ibrahim Z (2013) Detecting high impedance fault in power distribution feeder with fuzzy subtractive clustering model. Aust J Basic Appl Sci 7:81–91
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Narasimhulu, N., Kumar, D.V.A. & Kumar, M.V. LWT Based ANN with Ant Lion Optimizer for Detection and Classification of High Impedance Faults in Distribution System. J. Electr. Eng. Technol. 15, 1631–1650 (2020). https://doi.org/10.1007/s42835-020-00456-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-020-00456-z