
Abstract
Surveillance and anti-surveillance are currently the dominant forms of orbital game of spacecraft. Based on the maneuver capabilities and surveil strategies of typical surveillance satellites, an evasion strategy as well as a defend strategy using an escort satellite are proposed. The maneuver capabilities of a typical geostationary earth orbit (GEO) satellite are first demonstrated, followed by a detailed demonstration of the evasion abilities against the approaching surveillance satellite. Then a high-maneuvering escort satellite is proposed as another way to cope with the surveillance satellite and the corresponding defend strategies are analyzed. Simulation results demonstrate that a normal satellite can hardly escape the approach and detection of a smart surveillance satellite. However, a high-maneuvering escort satellite can maintain precise sight tracking of the surveillance satellite, which means with certain protective payloads installed, the escort satellite can successfully drive the surveillance satellite away from our high-valued GEO satellite.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The initial research on adversarial behavior of flight vehicles based on game-theory was primarily focused on unmanned aerial vehicles and missiles, which have strong maneuvering capabilities and clear game characteristics [1,2,3,4,5]. Later, with the increasing attention on orbital space, orbital game, which is the most primary combat mode in space, gradually became a research hotspot in the field of aerospace dynamics and control.
Classical orbital game refers to the orbital evolution process and its results formed by two or more moving objects constrained by orbital dynamics in the gravitational field of celestial bodies. The objects exert control actions actively to pursue contradictory or inconsistent relative goals under the constraints of control capabilities and supporting information available. The problems can be further developed and modeled as anti-rendezvous escape, anti-surveillance, and anti-interception, etc. To solve these problems, one main approach is to introduce differential game theory into the guidance and control problem, and solve for the optimal adversarial trajectory for both enemy and friendly spacecraft [6,7,8,9,10]. Considering the characteristics of space orbits, we can also define generalized orbital game. If one party in the adversarial situation exhibits abnormal maneuvers outside of routine flight, such as close approaches and rendezvous with non-cooperative targets, it can be referred to as a generalized orbital game.
Orbital game strategy is influenced by various factors such as the situation of both enemy and friendly forces, equipment capabilities, and combat objectives. The specific strategies are designed according to the application scenarios and the corresponding requirements.
In this research, an anti-surveillance scenario is demonstrated, in which an enemy chaser satellite approaches and observes our satellite while our satellite tries to avoid the rendezvous and the observation. The avoidance strategies of our satellite, including self-maneuver strategies and protection strategies using a smart satellite to drive the enemy satellite away are illustrated. Detailed analyses as well as simulations are presented to evaluate the effectiveness of the above strategies.
2 Capability and Strategy Analysis of the Chaser Satellite
2.1 Overview
A typical chaser satellite weighs approximately 650 kg to 800 kg when using the GEOStar-1 satellite platform developed by Orbital ATK (Fig. 1). The dimensions of the chaser satellite are approximately 1500 mm (L) × 1500 mm (W) × 1900 mm (H). In order to identify the target satellite and understand its behavior, the chaser satellite carries optical payloads that provide optical imaging information of the target satellites. Another potential payload carried by the chaser is a radio frequency monitoring payload, which receives radio signals emitted by the target satellite. This payload is also used for the identification of the target satellite and the assessment of its activities. By the combination of these two payloads, the chaser satellite is able to provide detailed information needed to identify potential threats from satellites on geostationary orbit.

On-orbit overview of the chaser
2.2 Capability Analysis
2.2.1 Orbit Maneuver Capability Analysis
Based on the configuration of the chaser, it is estimated that the propulsion system of the chaser satellite consists of three types of thrusters. The first type is a 490N orbital control thruster, which can be repeatedly ignited for orbital transfer. The second type is four 22N monopropellant thrusters used for axial position control and attitude control. The third type is four 10N monopropellant thrusters used for east–west position keeping and attitude control. Considering the mass of the satellite platform, the maximum orbit maneuver capability of the chaser is estimated around 0.75–0.8 m/s2. The maneuver capability during routine orbit correction is around 0.034–0.135 m/s2.
2.2.2 Attitude Maneuver Capability Analysis
Based on the available image information, it can be inferred that the chaser satellite maintains target tracking through platform maneuvers. In order to improve the maneuvering capability of the satellite, the platform and the payload of the chaser satellite are integrated designed with the high-resolution cameras sink inside the panel of the platform. This integration design helps to reduce the moment of inertia, which means the satellite can have a faster response to attitude control torque.
From the perspective of mission application, the chaser satellite observes satellites along the geosynchronous orbit belt. Targets in this belt have an orbit inclination within 15° and an orbit height range of 36000 km ± 200 km. When the chaser satellite is flying 200 km below the nominal geostationary orbit (GEO orbit), the target satellite is directly above the satellite. In this case the maximum tracking angular velocity of approximately 0.9°/s. Therefore, based on the above comprehensive analysis, the tracking system of the chaser satellite is platform maneuvering with a tracking angular velocity of approximately 1°/s.
2.2.3 Observation Capability Analysis
The specific parameters of the chaser satellite’s payloads are highly classified. However, based on the study of the space imaging camera currently in use, the estimated parameters of the imaging payloads of the chaser satellite are as follows:
-
Wide-field camera: aperture of 30 cm, field of view of 3° × 3°.
-
Narrow-field camera: aperture of 0.6 m, field of view of 0.075° × 0.075°.
2.3 Mission Strategy Analysis
2.3.1 Surveillance Strategy
The chaser satellite flights on the nominal GEO orbit (− 200 km + 100 km) and performs upper drift or lower drift orbit maneuvers. A single satellite can complete a comprehensive survey of the global geosynchronous orbit belt within 400 days, while multiple satellites can significantly reduce the survey time. Proximity inspection is usually conducted in the lower drift orbit, with an average orbit altitude of 35,715 km.
2.3.2 Detailed Inspection Strategy
For important targets, the chaser satellite can approach and take close inspections through orbital maneuvers to obtain certain target information, such as morphological structures, electromagnetic parameters, major payloads, and flight regularities. Considering the distance to the target, the approach time as well as the favorable illumination conditions, various task trajectories such as flyby, natural flying-around, forced flying-around and directional hover can be used for inspection.
3 Game Strategy Analysis
3.1 Evasion Strategy
The chaser conducts a significant portion of its close surveillance on large satellites such as communication satellites. Therefore, the capacities of common communication satellites and the chaser satellites are first analyzed first.
Considering the following scenario, the chaser satellite approaches one of our communication satellites, while the communication satellite tries to escape away from the chaser through orbital maneuvers. The concrete parameters of the evasion scenario are as follows:
3.1.1 Scenario Design of the Evasion Game
-
1.
Evasion target: a surveillance satellite.
-
2.
Number of target: one.
-
3.
Orbit of the evasion target: GEO orbit (upper and lower) .
-
4.
Relative velocity of the approaching target: 100–0.5 m/s
-
5.
Target azimuth: Along the sunlight direction.
-
6.
Maneuvering capability: 0.03–0.8 m/s2.
-
7.
Control system: Orbit drift is used for long-distance rendezvous, and visual pointing tracking is used for close approach.
-
8.
Field of view of the camera: 0.075° × 0.075°.
-
9.
Detecting distance of the camera: 50–6 km.
Parameters of the chaser are as follows (Table 1):
The parameters of our communication satellite are as follows (Table 2):
3.1.2 Distance Avoidance
Assume that the chaser approaches the evader along Vbar direction at a speed of 50 m/s, and then tries to stay at a parking point which is 5 km below the evader. The chaser employs four axial thrusters with a total thrust of 88N, which can provide the evader with a maneuvering capability of 0.2 m/s2. On the other hand, the evader has a maximum maneuvering capability of 0.1 m/s2 and uses its maximum maneuvering capability to avoid the approach of the chaser.
The simulation results are as follows (Figs. 2, 3, 4, 5):

Relative trajectory in reference frame

Relative distance

Control series of the chaser

Control series of the evader
It can be observed that, given the supposed control capabilities, the evader is unable to escape from the approach of the chaser despite of using optimal maneuvering strategies. The reason of the above result is that there is an obvious maneuver capability gap between these two satellites. During the same period of time, the chaser can accumulate greater velocity increment the evader. The above simulation results are based on the assumption that the chaser uses its low thrusters to conduct the maneuver. In situations when the chaser employs its 490N main thrusters for long-range maneuvers, its maneuvering capability is even stronger, making it easier to capture the evader.
3.1.3 Field of View Avoidance
Assume that the chaser approaches and detects our satellite within a distance of 20 km. Our communication satellite tries to escape out of its field of view through orbital maneuvering. Theoretically, the closer the chaser is near the evader, the easier the evader can escape out of the chaser’s field of view.
During the maneuver period of the evader, the chaser still tries to track the relative sight direction. Simulation shows the results with different attitude control torques of the chaser.
(1) Attitude control torque T = 0.001 Nm (Fig. 6).

Attitude tracking result of the chaser with 0.001 Nm control torque in the chaser’s body frame
(2) Attitude control torque T = 0.0015 Nm (Fig. 7).

Attitude tracking result of the chaser with 0.0015 Nm control torque in the chaser’s body frame
(3) Attitude control torque T = 0.005 Nm (Fig. 8).

Attitude tracking result of the chaser with 0.005 Nm control torque in the chaser’s body frame
Based on the above figures, it can be seen that when the chaser’s control torque is 0.001 Nm, the chaser fails to track the maneuver of the evader. When the control torque is 0.0015 Nm, after a long period of oscillation convergence, the chaser is eventually able to stably track the target, as shown in Fig. 7. The relative motion of the evader is along the line of sight of the chaser. When the chaser control torque is larger, the chaser can stably track the target in a short period of time.
According to the capability analysis shown in Sect. 2.2, it is obvious that the attitude control capability of the chaser is much larger than the capability required to track the evader. On the other hand, the fuel consumption of the evader is around 0.16 kg/s, making long-range evasive maneuvers unacceptable. Therefore, it’s not practical to depend on the evader itself to avoid the surveillances of the chaser.
From the game simulation analyses of the evader, it can also be concluded that when the chaser is a rational player that adopts optimized tracking control strategies, the limited maneuvering capability of the evader prevents it from escaping the chaser’s distance approach and sight tracking. However, in actual operations, both satellites are very cautious about using large pulses for continuous trajectory changes considering limited fuel carried. Most of the time, they use small pulse for probing actions.
3.2 Defense Strategy
Based on the above analyses, it is unlikely for large satellites to evade the close operations of smart small satellites through their own maneuver. For large and high-valued satellites, some other methods are needed to drive the approaching chaser away. One of the methods is using relatively inexpensive micro-sized satellites for close-range escort. The following context analyzes the strategies of using one escort satellite to protect high-valued but inflexible satellites.
To accomplish the surveillance mission, the chaser requires close proximity to the target (< 25 km) and uses a narrow-field camera for close-range imaging. Additionally, to ensure quick capture of the target during the mission, a wide-field capture camera is usually installed for large-range target search and capture. Therefore, the entire process requires persistent pointing and tracking of the target. When the escort satellite is equipped with a payload, in order to satisfies the working conditions of the payload, the escort satellite needs to be within the field of view of the chaser. That means the escort satellite should be within the cone with the chaser as the vertex and the chaser-evader direction as the cone axis. The semi-cone angle is obviously half of the field of view of the optical camera. Therefore, the tracking error angle of the escort satellite with respect to the axis of the chaser’s field of view should be used as the performance indicator for the game, where the escort satellite aims to minimize the tracking error angle while the chaser aims to maximize it.
3.2.1 Scenario Design of the Escort Game
The escort game scenario design is similar to that of the evasion game. In addition, the parameters of the escort satellite are shown in the following Table 3.
3.2.2 Pointing and Tracking Escort Strategy
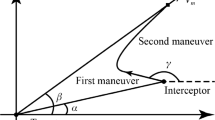
Considering no dynamics errors, control errors, and navigation errors, the escort satellite can achieve field-of-view pointing and tracking of the chaser through double thrust control. The first pulse satisfies the required position constraints, while the second pulse satisfies the required velocity constraints (Fig. 9).

Illustration of double thrust guidance for collinear terminal states
The simulation results without considering errors are shown as follows (Figs. 10, 11, 12).

Relative trajectory in Hill reference frame

Tracking angle error

Velocity pulse series
To compensate the effects of various errors, error correction guidance based on error models is employed to ensure that the tracking angle error meets the requirements while minimizing the frequency of corrective pulses.
For the analysis of dynamic errors, assuming the initial escort satellite is collinear with the chaser and corrective pulse control is applied to correct the dynamic errors. Suppose the standard deviation of absolute control error σ_ε = 0.01 m/s, multiple sets of simulation results are shown below (Figs. 13, 14).

Tracking deviation angle considering dynamical errors

Pulse series considering dynamical errors
The simulation results indicate that the magnitude and average value of the initial tracking error angle decrease as the correction period shortens. When the guidance period is sufficiently short, the total velocity pulse within the given simulation time will not decrease further. As the guidance period approaches zero, the ratio of the pulse to the guidance period will be equal to the corresponding nonlinear relative acceleration but in the opposite direction. This ensures that the escort satellite remains on the chaser-evader line throughout the whole process, even under the two-body dynamics. In extreme cases, the total velocity pulse should be equal to the absolute total pulse exerted on the unit mass under the consideration of nonlinear relative acceleration.
For the analysis of control errors, assuming the initial escort satellite is collinear with the chaser and corrective pulse control is applied to correct the control errors. Assuming the standard deviation of absolute control error σ_ε = 0.01 m/s, multiple sets of simulation results are shown below (Figs. 15, 16).

Tracking deviation angle considering control errors

Pulse series considering control errors
To maintain four days of pointing and tracking of the chaser, a total pulse of 5.4 m/s is needed for the escort. The average control pulse interval is 21 min. From these results, it can be seen that in high-intensity game scenarios it is feasible to use an escort satellite to perform pointing and tracking operations against the chaser.
4 Conclusions
Based on the maneuvering capabilities and surveillance strategies of the chaser, it is demonstrated that our high-valued satellite cannot stay outside of the effective detection range or the field of view of the chaser, due to the obvious disadvantage on maneuvering capability. It is difficult for the high-valued satellite itself to avoid being observed or intercepted. However, by employing escort satellites equipped with protective payloads, we can establish a deterrent situation against the approaching chaser and provide protection for our high-valued satellites. When the escorting distance is sufficiently close, our satellites group can easily win the game.
Availability of Data and Material
The authors confirm that the data supporting the findings of this study are available within the article.
References
Ershen W, Jing G, Chen H et al (2021) UAV swarm air ground engagement model with improved payoff. J Nanjing Univ Aeronaut Astronaut 53(6):888–897
Na X (2020) Research on game decision-making and cooperative communication methods for multi-UAV. Tianjin University, Tianjin
Junsheng M (2005) The game theory—the core of maneuverable warhead attack and recovery. Aerosp Electron Warf 22(1):4–6
Gang L, Haipeng T, Yong X et al (2014) Research on the missile maneuver strategy based on game theory. J Solid Rocket Technol 37(3):291–294
Liran Z, Chaohui D, Yulin Z (2021) Orbital game: concepts, principles and methods. J Command Control 7(3):215–224
Venigalla C, Scheeres D (2018) Spacecraft rendezvous and pursuit/evasion analysis using reachable sets. In: 2018 Space Flight Mechanics Meeting, 2018:0219
Woodbury TD, Hurtado JE (2017) Adaptive play via estimation in uncertain nonzero-sum orbital pursuit evasion games. In: AIAA SPACE and Astronautics Forum and Exposition. 2017:5247
Chen J, Zha W, Peng Z et al (2016) Multi-player pursuit–evasion games with one superior evader. Automatica 71:24–32
Qiuhua Z, Songtao S, Ying C et al (2014) Strategy and numerical solution of pursuit-evasion with fixed duration for two spacecraft. J Astronaut 5(35):537–544
Hai Z (2017) Optimal control of spacecraft orbital pursuit-evasion based on differential gam. National University of Defense Technology, Changsha
Acknowledgements
We’d like to express our gratitude to the editor and the anonymous reviewers for their valuable recommendations which help us improve our paper.
Funding
No external funding was used.
Author information
Authors and Affiliations
Contributions
Fei Zong: performed the analyses and the simulations; Mengping Zhu: prepared the manuscript; Xinlong Chen: provided guidance on the manuscript.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no competing financial or non-financial interests.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
For this type of study formal consent is not required.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zong, F., Zhu, M. & Chen, X. Game Strategies Against High Orbit Surveillance Satellites. Adv. Astronaut. Sci. Technol. (2024). https://doi.org/10.1007/s42423-024-00163-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42423-024-00163-1