
Abstract
In recent years, energy dissipative systems have been used as effective devices in structures subjected to earthquake loads. The optimal design of dampers has gained popularity as a research topic during the last four decades. That is widely notable that dampers can contribute a unique function in dynamic structures by considerably reducing the dynamic response. The efficient design and configuration of the passive dampers are essential for the mitigation of damages due to the earthquake in the structure. Thus, finding the optimal placement of dampers has a key role in the protection of the building. However, the remaining difficulty in damping devices is determining the parameters and placement of each damper. This paper presents an overview of the optimal damper distribution as passive systems for energy dissipation in order to retrofit structures against the earthquakes. That is quite essential for determining the location of these devices for simulating the structures with dampers effectively. Nevertheless, the reaction of the structure requires to be identified for applying the dampers. General results have been achieved regarding optimal damper configuration in the structures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
During a seismic event, ground movement transfers a massive amount of energy to structures; even comparatively weak seismic motions may result in tremendous constructive damage and many fatalities (Abdullah 1999). In recent years, technology for enhancing the overall ground motion performance consistency has been developed. Thus, energy dissipation systems have been used for designing taller buildings positioned in high seismicity regions. There are various forms of systems for seismic safety, which improve the ground motion behavior, categorized as passive, active or protection systems. The passive protection systems are the most commonly used, because of their verified effectiveness and simplicity, including isolation systems and energy dissipation devices. It has to be noted that the most practical solution for controlling the structural seismic response is the application of the seismic isolation system with energy dissipation devices. Seismic isolation system represents a flexible isolation system between the structure and the foundation in order to increase the natural period of the system. The period of the base-isolated structure is longer than the fixed-base structure. Therefore, the isolation systems increase the response of the structure for the earthquake motion with long period, which prevent the resonance phenomenon in the structure (Lagaros et al. 2012; Hassan and Billah 2020).
The devices for energy dissipation are mainly designed for dissipating large magnitudes of energy. Supplemental damping is turning into a growing amount of tried and proven strategies of seismic design, providing for the development of the structure to contain flexible, mentally damped systems. There are numerous practical applications of dampers worldwide. Damper location is an essential concern in the design process because the distribution of dampers has a crucial effect on the dynamical reactions and the cost of the building. That is rough to acquire a theory-based method for locating dampers, as there is a vast number of possible damper placement combinations. Thus, finding an appropriate method for obtaining the optimal location of dampers in the structure is necessary. A broad variety of damper distribution methods have been recommended for response reduction in structures. The dampers can be located along the height of the building by three groups of methodologies, namely analytical, heuristic, and evolutionary (Domenico et al. 2019).
In order to solve a damper problem, various objective functions can be employed, and the importance of various cost functions depends on the type of the structure. While a displacement-based design considers the reduction in displacements or inter-story drifts, a forced-based design considers internal forces and accelerations. More precisely, different structures need a defined energy or structural damage indices. In this regard, the results of the damper design also depend on the objective functions. Some of the objective functions are maximum inter-story drifts, the sum of inter-story drifts (Takewaki 2000a), absolute acceleration (Cimellaro 2007), top displacement, base shear (Aydin et al. 2007), a defined damage index based on energy (Lavan and Levy 2005), a defined damage index, overturning moments, and the combinations of some structural performance functions.
Many studies on optimal damper locations have been conducted so far (Takewaki 2009; Jarrahi et al. 2020; Domenico and Hajirasouliha 2021; Rafiee et al. 2021). Takewaki (1997a) presented an optimality criterion-based method based upon the formulation of the incremental inverse problem approach considering the minimization of the inter-story drifts summation in the transfer function amplitude and the total damper quantity as the constraint. This method is independent of input seismic properties; hence, it is a simple approach. Aydin et al. (2007) used the mentioned approach considering the base shear in the transfer function amplitude. Fujita et al. (2010a) enhanced an optimization method for the constant damper quantity by using the transfer function for minimizing the maximum inter-story. Lavan and Avishur (2013) used the Monte Carlo method for finding the optimal damper placement under undefined circumstances. Most of the numerical processes in the researches about damper placement are limited to the single-objective problems; however, sporadic exceptions exist. Lavan and Dargush (2009) implemented the Pareto front for minimizing two performance indices, namely maximum absolute floor acceleration and inter-story drift. Adachi et al. (2013) presented an optimal design scheme by determining the relief forces regarding the design targets which were defined by the maximum top-story acceleration and inter-story drift. Yahyazadeh and Yakhchalian (2018) studied the distributions of the linear and nonlinear fluid viscous dampers (FVDs) considering the damping coefficients on the maximum inter-story drift ratio response of steel special moment-resisting frames.
Several damper placement methods have been presented in the most recent studies (Shirkhani et al. 2021; Halperin et al. 2021). Zhao et al. (2020) proposed an integrated optimum design for toggle-brace damper system based on the combination of multi-grade constrained method and sequential quadratic programming (SQP) algorithm. Patil et al. (2020) considered multi-objective optimization for finding the optimum location of viscoelastic dampers in dynamically similar adjacent buildings. Hu et al. (2020) proposed a performance-oriented design framework and investigated the pattern of damping distribution. Aydin et al. (2020) applied the method of damper optimization based on the inter-story drift ratio and damping ratio, which is presented at Aydin (2013), considering different types of sandy soils. Sanghai and Pawade (2021) presented a method for finding the best placement of friction dampers that takes into account the nonlinear soil foundation system. Gomez et al. (2021) provided a methodology for obtaining optimal spatial distribution, size, and topology of viscous dampers for stochastically excited buildings, simultaneously. Takin et al. (2021) confirmed that the upper stories are the best location for dampers considering fuzzy logic controllers. Stanikzai et al. (2020) proved the higher response reduction in placing tuned mass damper at top floor in comparison with placement at the lower floors for base-isolated buildings. Kangda and Bakre (2021) proved the efficiency of the damper placement at top floor in comparison with the placement of dampers at all floors considering two adjacent buildings. Also, several studies about the comparison of different methods have been accumulated so far (Landi et al. 2015; García 2001; Silvestri and Trombetti 2007; Whittle et al. 2012; Cetin et al. 2019).
This paper proposes an overview of the most popular methods for damper placement in the literature so far. This research assists designers to simultaneously identify the necessary methods and damper capacity to achieve specified expected responses and desired performance levels. A comparison of the methods shows that the amount of the dampers and their optimal placement is directly affected by different assessment functions, but the seismic response may be decreased significantly by all locations of dampers. The determining factors for choosing the evaluation functions and optimal damper locations are the structural characteristics and its associated functions.
The sections of this study are structured as follows: Section 2 explains the design methodologies. Subsection 2.1, 2.2 and 2.3 propose the literature review of evolutionary, analytical, and heuristic methods, respectively. Then, comparative studies of the methods are explained in Sect. 3. Section 4 discusses the methods that have been presented in the previous sections. Finally, the outcomes are presented in Sect. 5.
2 Design Methodologies
The design methods for determining optimal damper placement could be classified into three main groups, such as evolutionary methods, analytical methods, and heuristic methods, as shown in Fig. 1. Evolutionary methods include genetic algorithm (GA), artificial bee colony algorithm (ABCA), and the firefly algorithm (FA). Optimal control theory (OCT), gradient-based algorithm (GBA), inverse problem approach (IPA), steepest direction search algorithm (SDSA), and fully stressed design algorithm (FSDA) are allocated to the analytical group. The heuristic methods include sequential search algorithm (SSA), simplified sequential search algorithm (SSSA), pattern search algorithm (PSA), first story damping system (FSDS), uniform distribution (UD), story shear proportional distribution algorithm (SSPD), story shear strain energy distribution procedure (SSSE, SSSEES), and stiffness proportional distribution (SPD). The literature review of these methods will be outlined in the following subsections.

Design methodologies for optimal damper placement
2.1 Evolutionary Methods
Evolutionary approaches, mainly GA, presume various starting points and sequentially execute the search with no gradient calculation. In the case of no differentiable cost functions or performance indices, it could vary significantly across the amplitude of design variables; thus, there might be several optimum local values. Holland (1975), Goldberg (1989) and Mitchell (1998) explained this method in detail and the basic theory. These approaches essentially work on a population of possible solutions that leads to the best individual position regarding the best fitness cost, based on the regulations of biological evolution. In contrast to GBA, GA suffers from an increased processing effort. Several types of research have performed in the case of using GA for damper design (Lavan and Dargush 2009; Silvestri and Trombetti 2007; Singh and Moreschi 2002; Wongprasert and Symans 2004; Liu et al. 2005; Park et al. 2004a; Movaffaghi and Friberg 2006). Selecting an appropriate value for the number of evolutions and population size is essential for converging the probabilistic-based evolutionary approaches toward the optimal solution. Therefore, the decision-maker calibrate the above-mentioned parameters and extensive numerical simulations are also required for testing the sensitivity of the solution (Silvestri and Trombetti 2007).
Furuya et al. (1998) determined the ideal position of energy-absorbing devices to suppress wind-evoked vibrations in tall buildings by using a GA. The flowchart in Fig. 2 exhibits the GA process. A selection, a mutation, and a crossover are the plural imaginary creatures made as a population during this evolution process. As the outcome, a semi-optimal or optimal solution can be obtained by the chromosome evolution in the imaginary creatures that demonstrate the distributed condition of the damper. In recent years, the GA has been further enhanced to calculate the appropriate position of the dampers. The most economical and effective location of dampers is obtained by the health function comprised in this methodology.

Flowchart of the genetic algorithm (Furuya et al. 1998)
Moreschi (2000) proposed the distribution of dampers as a discrete combinatorial problem and then used GA to find ideal damper placement and sizes. Singh and Moreschi (2002) defined the placement and size of frequency-independent and dependent dampers with a process based on the GA. The performances can be demonstrated in the case of the chosen responses (i.e., overturning moment, floor acceleration, or base shear) by implementing the suggested method. Also, it can be shown as a performance function, based on some response quantities.
Lavan and Dargush (2009) presented the comparison between structural response strategies and devices by using a multi-objective GA. This procedure offers the required data for demonstrating the trade-off between the two objectives, namely minimization of acceleration and drift. Figure 3 displays the flow diagram of the development of solutions generations. Firstly, analysis for each member of the population is carried out at any generation of the process of the multi-objective GA. Each design is placed in the objective space depending on the results of the analysis for acceleration and the maximum drift. Afterward, the process is divided into two branches. One of them is related to overall dominance based on a global fitness that leads to the best solutions for the next generation in the population. Another one is related to the dominance of the local angular based on a local fitness, which gives the priority to solutions that are placed in an isolated objective space zone. The high chances of selecting the format is related to the larger local fitness of a given solution. Isolated solutions can develop their rate toward the Pareto front by using local fitness.

Flow diagram of one generation
Apostolakis and Dargush (2010) established a computational method on the basis of GA for the hysteretic passive dampers design inside steel moment-resisting frames. Furthermore, the computational framework explored the optimum locations for relinquishing metallic buckling restrained braces and moment-resisting frames. Also, samples of multi-story buildings were included with seismic environment representative of the USA west shore. Mohebbi et al. (2013) recommended an approach for designing multiple tuned mass dampers by employing the GA for the optimization. Input excitations motivate the performance of these dampers, and the efficiency of the method is verified.
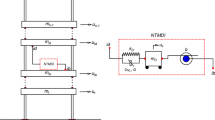
Greco and Marano (2016) offered a design process by implementing the worldwide seismically safety scheme and a multi-dimensional criterion for dissipative links in a wall-frame system. This system is a multi-objective design process including the displacement between the frames and a genetic process recognized as the non-controlled categorization GA II. A wall-frame system, which is connected by a dissipative relation, is shown in Fig. 4. Figure 4a shows two adjacent structures with two systems of linear SDOF, and Fig. 4b demonstrates the Kelvin–Voigt model that was adopted in their study.

Structural model of a wall-frame system connected by a dissipative relation
Yousefzadeh et al. (2011) utilized GA to determine the characteristics and optimum position of TADAS dampers, considering the average index of damage for all elements of a frame and index of damage for each element. Consequently, four optimal damper locations are proposed that fulfill the criteria for the destruction of the elements. Movaffaghi and Friberg (2006) implemented the GA for optimizing the position and number of the dampers for 3D steel structure. This procedure reduces the fitness function in the second floor of the structure as the maximum value of the vector sum of the three translational acceleration.
Kim et al. (2017) studied the optimal placement of steel plate slit dampers by GA for improving the seismic performance of a reinforced concrete shear wall structure and the validity of the story-wise damper distribution combined with the capacity spectrum method based on the inter-story drift pattern was assessed. Kim and An (2017) used GA to determine the best distribution of friction dampers to efficiently minimize the seismic response of the reinforced concrete moment frame. Bogdanovic and Rakicevic (2019) performed the optimization process by GA and thirty optimum solutions were concluded. The process is complex and takes a long computational time to achieve the required solutions. Considering the reduction in drifts and acceleration as objective functions, leads to better structural performance for optimum damper placement.
Sarcheshmehpour et al. (2020) determined the optimal location of dampers for 2D steel moment frames by GA in order to satisfy three levels of service performance, life safety, and collapse prevention as target performance. The ET method was utilized for the frames analysis and seismic response estimation. The soil under the structure was simulated by a discrete model based on the idea of cone models for two levels of soil stiffness. Results show that the maximum drift ratio reduction is obtained at low excitation intensities; however, less drift is calculated in the upper floors of the fixed-based frames in comparison with the soil-structure systems.
The ABCA, like a swarm intelligence method, is one of the most recently established direct search algorithms. Karaboga (2007, 2008) first offered ABCA for the continuous optimization problems. Sonmez (2011a) discover a strategy to be constant using the modified version of the ABCA. It was shown that ABCA has practical consequences, which are as excellent as or better than some other methods such as particle swarm optimization (PSO), the GA, and ant colony optimization (ACO). Additionally, it was confirmed that this method has remarkably strong performance with the success rate equal to 100%. Sonmez et al. (2013) presented and utilized ABCA to optimize viscous damper location and size in planar buildings, which effectively increase the resistance of frame systems to earthquakes. In their research, within a planar building frame, the damper coefficients were taken into account as design variables and objective function was defined as the elastic base shear force and the top displacement transfer function amplitude. The presented technique is proved by considering the GBA and the SDSA. This is a relatively simple method to solve the damper configuration issue. Figure 5 shows three food resources, the waggle dance of the bees that trying to find the sources of food and one hive (Lemmens et al. 2007). During their journey, all forager bees find sources of food with varying quantities.

Waggle dances for different food sources (Sonmez et al. 2013)
The ABCA provides potential solutions to an optimization problem represented by food resources and nectar amount. The design variables Cad (c1,c2,…,cN) are considered as food resources. In the initial step, all the forager bees look for promising patches of the flower by leaving the hive. The equation of the food resource location, s, is expressed as:
where γ denotes a selected number from 0 to 1. \(c_{j}^{{{\text{low}}}}\) and \(c_{j}^{{{\text{up}}}}\) are the lower and upper bounds of the variables, respectively. The first half of bees discover the best resources of food called “employed bees.” The rest of the bees as “unemployed bees” will follow the employed ones. The unemployed bees select a food resource based on the available amount of nectar at the food resource.
Some studies have been proposed based on the FA; however, it nevertheless needs more research as it is relatively current. Yang (2010) proposed information about the FA with the content of diverse details about the method and computational codes for implementation. It was stated that the attraction of a firefly is decided by using its brightness, which in turn is associated with the objective function. Moreover, each member of the firefly group is defined by using its brightness that might be straightaway stated as a backward of a target feature for a minimization problem. Lukasik and Zak (2009) carried out the FA for the constantly forced optimization. Fister et al. (2013) proposed an extensive survey of the FA.
Miguel et al. (2015) studied a technique that performs efficiently to discover the optimum design for both placement and force of dampers located in the footbridges. This was achieved via the implementation of the FA. To this aim, two footbridges were analyzed, considering the positions and forces of the friction dampers as the design variables and minimizing the maximum acceleration as the cost function. This method was useful in determining both the optimal friction force and the ideal location of each damper. The flowchart in Fig. 6 highlights the FA. The first step is determining the parameters, objective function, and variables. The next step is determining a population of fireflies. Then, light intensity should be determined. After that new solutions are evaluated in an iterative loop, and light intensity is updated. Finally, the best solution is obtained by ranking the fireflies.

Flowchart of the firefly algorithm (Miguel et al. 2015)
Table 1 exhibits a collection of literature on the basis of the evolutionary algorithm with their corresponding authors, year, and the title of the research.
2.2 Analytical Methods
Gluck et al. (1996) applied OCT in order to lessen the cost function of the damper design problem considering the control gain matrix in the context of active control theory. Different approaches for the structures with a single-mode response have defined the best position for passive dampers. To display the efficiency of the technique, applications were proposed for braced multi-story structures retrofitted by viscoelastic and viscous dampers. The GBA could be used for providing the distinct output indices and its gradients could be calculated. Optimization methods based on GBA have been implemented in Lavan and Levy (2005, 2006a, b), Takewaki (1997a), Silva (1981), Singh and Moreschi (2001), Park et al. (2004b), Attard (2007), and Lavan (2015). Takewaki (2009) presented the research that has been the revolutionary task in smart passive damper location. Many researchers have been referred to this study for decades. Principles of the reciprocal problem procedure and optimum GBA are crucial in this research, and optimal criteria-based design approaches are shown in Fig. 7. The first step is to calculate Δc. If the optimality criteria are fulfilled for c + Δc, the process is finished otherwise update γ and compute Δγ. Afterward, eliminate the jth column and the (j-1)th row of the coefficient matrix. Then, repeat these steps until the optimality criteria are satisfied.

Flowchart of the process for optimality criteria-based design (Takewaki 2009)
De Silva (1981) used the GBA for the calculation of ideal damper placement. The algorithm systematically sets the modal damping and the natural frequency parameters to pre-assigned values to optimally control vibrations for the class of flexible structures, thereby achieving the necessary magnitudes. Hwang et al. (1995) achieved an identical crucial modal damping ratio in actively controlled structures via the implementation of the GBA for locating damping devices. Moreover, they considered the consequence of the braces of dampers. In reality, viscoelastic dampers are set up by steel braces, and the braces are frequently neglected in the analysis because they are assumed to have infinite relative stiffness.
Fujita et al. (2010b) identified an effective technique for optimizing the distribution of dampers based on the GBA and corresponding supporting elements to decrease an objective function of a linear multi-story shear structure model that is subjected to resonant floor inputs. The recommended objective functions were a combination of structural performance indices, like placement of the tower and deck, the moment of tower and crossbeam, pressure, and displacement of the damper. Figure 8 illustrates the flowchart of the process. The first step is designing the structure without damper. Then, the frequency of undamped fundamental natural circular frequency should be calculated. After that the power spectral density (PSD) function is calculated as a band-limited white noise with central frequency. Subsequently, the axial force of the supporting members is assessed, and the story with the maximum value of the objective function is identified in terms of first-order sensitivity. Finally, the number of stories that have the maximum values of the first-order sensitivity is counted.

Flowchart for optimal placement of viscoelastic dampers and supporting members (Fujita et al. 2010b)
The IPA introduced by Takewaki is one of the most common methods in this class of approaches. The displacement transfer function is conveniently derived for specific dynamic parameters, comprising stiffness, mass, and damping coefficients. The main notion of Takewaki (1997a) was to address the IPA in an incremental manner (Takewaki 1997b). In conjunction with a particular redesign process, Takewaki (1997a) enhanced an incremental approach to evaluate the dynamic parameters corresponding to an assessment on undamped natural frequency of the transfer function that minimizes the sum of inter-story drifts. In the optimization problem, a constraint condition was also forced on the summation of the damping coefficients that demonstrate the total cost of the FVDs. The solution to this optimization problem was the stationary Lagrangian formulation conditions that led to a consecutive method for the optimal configuration, see also Takewaki (2009). Sanchez et al. (2018) calculated the optimal location of dampers based on the IPA for shear buildings considering the unchanged stiffness on each floor. Akehashi and Takewaki (2020) proposed an extension of the Takewaki method (Takewaki 1997a) to higher-mode responses for finding the optimal damper placement on elastic–plastic structures.
This incremental process was effectively extended to other mechanical problems and was renamed as the SDSA (Takewaki 1998). This sequential process transfers toward the direction that decreases objective function faster under the constraint condition. Some studies have been proposed based on the SDSA (Takewaki and Yoshitomi 1998; Takewaki 1999, 2000b; Takewaki et al. 1999; Takewaki and Uetani 1999).
In a two-stage hybrid displacement–acceleration control process, the incremental IPA and redesign process method were applied for the distribution of the story stiffness and detection of the optimal damping coefficient in a shear building model (Takewaki 1999). Furthermore, this numerical algorithm was used for 3D shear building models (Takewaki et al. 1999), planar moment-resisting frames (Takewaki 2000a; Takewaki and Yoshitomi 1998), and optimum damper location regarding soil–structure interaction (Takewaki and Uetani 1999). In the context of a probabilistic framework, the optimal damper location was also evaluated by the critical excitation concept (Fujita et al. 2010b; Takewaki 2000b). Takewaki (2000a) implemented the idea of optimal sensitivity to introduce a new method of damper placement calculation, in which the SDSA derives the damper positions by minimizing the dynamic compliance. It is determined as the total transfer function magnitudes of inter-story drifts calculated at the undamped basic natural frequency. This algorithm consecutively calculates the optimal location with the levels of damper capacity. The validation of this method is illustrated in the corresponding numerical calculations of the uniform damper positions. Aydin et al. (2007) used the Takewaki optimization strategy variation by modifying the objective function, on the basis of the base moment and base shear transfer function amplitude (Aydin 2012). Sivrikaya et al. (2021) utilized SDSA for finding optimal placement of viscous dampers for a shear building model considering the effect of sandy soil on the dynamic response.
Viola and Guidi (2009) extended the Takewaki method by adding a free variable to optimize the supporting brace stiffness. Their method consisting of two steps aimed to identify the optimal brace stiffness values and optimal damper placement considering reducing the summation of the mean square inter-story drifts and the maximum acceleration for the first and second step, respectively. Levy and Lavan (2006) presented FSDA, in which the influence of the dampers on the output index parameters (i.e., acceleration or inter-story drift) is maximized by an iterative process. Subsequently, the same authors (Lavan and Levy 2009) improved the process by applying the constraint on the damping. This method was performed widely on industrial constructions, 3D irregular frames, and shear frames (Lavan and Levy 2006a; Lavan 2015). Table 2 displays a collection of literature on the basis of the analytical algorithm with their corresponding authors, year, and the title of the research.
2.3 Heuristic Methods
Some researchers proposed some studies for optimal damper placement by using the SSSA (García 2001; Zhang and Soong 1992; Chen and Wu 2001). Zhang and Soong (1992) initially presented the SSA and employed this approach for finding the position of four viscous dampers in a non-uniform shear structure with ten-story regarding the mean square of the inter-story drifts as optimal placement indices. Also, it was found that the reaction of the structure was considerably reduced, while the dampers located in the optimal places in comparison with cases without optimal damper placement. The goal of the SSA is to locate the maximum root mean square of the inter-story drift for each unit of the story. Nevertheless, local minima may affect the results of this SSA in the cases that a small amount of dampers are placed in many story units. Then, Wu et al. (1997) applied it to the 3D torsional-coupled structures. Afterward, Shukla and Datta (1999) enhanced the scope of the SSA to include a more varied range of viscoelastic damper models. The excitations as narrow and broadband stationary seismic were modeled and explored the influences on various distributions of dampers. The result proved that the SSA is a valid algorithm for determining optimal damper distribution.
Afterward, Garcia (2001) and Lopez-Garcia (2002) presented the SSSA method. Aguirre et al. (2013) applied this method to 3D frame structures. This technique was motivated by the definition of the concept of a controllability index for the active structural control by Cheng and pantelides (1988), in which the controller is located at the positions with maximum displacement. During the SSA process, a predefined amount of damping is added in each step by adding supplemental dampers with the same size in the locations with the largest value of controllability index (e.g., the inter-story velocity or drift). This method uses the dampers with the same size that is appropriate for practicality, while in reality, only a few damper sizes are acceptable. Besides, Singh and Moreschi (2001) showed that the SSA method is appropriate for controlling inter-story drifts, and it is not effective for reduction in floor acceleration, specifically in the buildings that have non-uniform story stiffness.
Agrawal and Yang (2000) suggested a SSSA as the best, less complicated, and more practical in comparison with sophisticated methods. Garcia (2001), Lopez-Garcia (2002) enhanced an extension of the SSSA to take into consideration the probability of simultaneously optimizing stiffness and damper positions to control floor accelerations and inter-story drifts. Garcia (2001) decreased the computational procedure of SSSA indices and simulated ground motions. Consequently, they simplified the technique for passive devices. This iterative approach finds the placement of each damper by sequentially positioning them where they can produce the greatest resisting force. It was demonstrated that the SSSA method is efficient for a recommended number of steps considering the height of the building. Lopez-Garcia (2002) found the SSSA to be useful in determining damper configurations where the quantity of dampers is greater than or equal to 1.5–2 times the quantity of stories. Ground motion characteristics showed that the determined damper distribution was effective. Agrawal and Yang (1999) determined that exhaustive single point substitution (ESPS) and the Worst-Out-Best-In (WOBI) could be implemented to improve damper placement in seismic and wind-excited buildings by utilizing the SSA.
Another effective method for optimization is the PSA presented by Box (1957) and Hooke and Jeeves (1961). This method does not require information about the gradient of the objective function (Lewis et al. 2000). Pricopie and Costache (2016) implemented the PSA in order to minimize the inter-story drift. The basic idea of this method is considering steps of a certain magnitude for sampling the variables and decrease the magnitude when the changing is stopped in the value of the function. The algorithm centers the search on the new determined minimum, and the process is repeated until achieving small values of the variables.
Some other distribution approaches of heuristic methods based on the additional damping ratio predefined as per FEMA 356 (Agency and (FEMA356)2000) are as follows (Domenico et al. 2019):
-
Constantinou and Tadjbakhsh (1983) solved the damper placement issue by analyzing a FSDS intended for shear-type structures with several story. To this aim, the maximum displacements of each floor were calculated by analytical expressions. As a result, the mentioned damping system reduced the ground motion response and is shown in Fig. 9 despite presenting less efficiency compared with the base isolation system; however, it is still a useful method because it could be applied to the present structures.
-
The simplest one is the UD which assumes the damping coefficients cdj are equal at every floor. In this case, Whittaker et al. (1993) suggested that dampers should be located on each floor of the structure to obtain the position of dampers from base to the top. However, this may not be economically practical for high-rise buildings. Since seismic demands on additional dampers will not be the same at different stories, this approach may not be reasonable, particularly for vertically irregular buildings (Chintanapakdee and Chopra 2004; Mathur and Deb 2003; Stefano and Pintucchi 2008; Hussien and Elamy 2020). The damping coefficients in this method can be calculated as:
$$\begin{aligned} c_{dj} =& \frac{{4\pi \xi_{d} }}{{T_{1} }}\frac{{\sum\nolimits_{i = 1}^{n} {m_{i} \phi_{1i}^{2} } }}{{\sum\nolimits_{j = 1}^{{n_{d} }} {f_{j}^{2} (\phi_{1j} - \phi_{1j - 1} )^{2} } }}\quad \left( {i = 1, \ldots ,n} \right),\\&\left( {j = 1, \ldots ,n_{d} } \right) \end{aligned}$$(3) -
Pekcan and Mander (1999) presented the SSPD. This method was driven by the fact that the inter-story velocities of the upper stories are usually lower than the lower stories. Then, it was suggested that the FVDs can be distributed according to the story shears. The following distribution equation can be obtained, regarding that Vsj is in proportion to the parameter \(S_{j} = \sum\nolimits_{i = j}^{n} {m_{i} \phi_{1i} }\) at the story j (Pekcan and Mander 1999; Hwang et al. 2013).
$$\begin{aligned} c_{dj} = &\frac{{4\pi \xi_{d} }}{{T_{1} }}\frac{{S_{j} \sum\nolimits_{i = 1}^{n} {m_{i} \phi_{1i}^{2} } }}{{\sum\nolimits_{j = 1}^{{n_{d} }} {S_{j} f_{j}^{2} (\phi_{1j} - \phi_{1j - 1} )^{2} } }}\quad \left( {i = 1, \ldots ,n} \right),\\& \left( {j = 1, \ldots ,n_{d} } \right) \end{aligned}$$(4) -
Hwang et al. presented the SSSE method (Hwang et al. 2013), inspired by the idea of a composite damping ratio that is weighted by the strain energy of the element that was proposed by Raggett (1975). On the basis of this idea, FVD has been suggested to distribute proportionally to the story shear strain energy that could be measured in proportion to the \(\Psi_{j} = S_{j} (\phi_{1j} - \phi_{1j - 1} )\). The corresponding distribution formula is based on this criterion:
$$\begin{aligned} c_{dj} =& \frac{{4\pi \xi_{d} }}{{T_{1} }}\frac{{\Psi_{j} \sum\nolimits_{i = 1}^{n} {m_{i} \phi_{1i}^{2} } }}{{\sum\nolimits_{j = 1}^{{n_{d} }} {\Psi_{j} f_{j}^{2} (\phi_{1j} - \phi_{1j - 1} )^{2} } }}\quad \left( {i = 1, \ldots ,n} \right),\\& \left( {j = 1, \ldots ,n_{d} } \right) \end{aligned}$$(5) -
Hwang et al. (2013) have suggested locating the FVDs to the floors with higher level of shear strain energy in proportion to the normal story shear strain \(\Psi_{av} = \sum\nolimits_{i = 1}^{n} {\Psi_{i} /n}\). Let us consider neff, the amount of the effective stories, such as the stories like \(\Psi_{j} > \Psi_{av}\). The SSSEES placement equation is a variation of Eq. (5) implemented to the effective stories and with the summation on the denominator constrained to those neff effective stories:
$$\begin{aligned} c_{dj} =& \frac{{4\pi \xi_{d} }}{{T_{1} }}\frac{{\Psi_{j} \sum\nolimits_{i = 1}^{n} {m_{i} \phi_{1i}^{2} } }}{{\sum\nolimits_{j = 1}^{{n_{{{\text{eff}}}} }} {\Psi_{j} f_{j}^{2} \left( {\phi_{1j} - \phi_{1j - 1} } \right)^{2} } }}\quad (i = 1, \ldots ,n),\\&(j = 1, \ldots ,n_{{{\text{eff}}}} ) \end{aligned}$$(6) -
The SPD refers to the Cd = βK, in the group of Rayleigh damping systems (Chopra 2012; Clough and Penzien 2003), defined by the “inter-story installation scheme” of the FVDs.

Model of the primary system (Constantinou and Tadjbakhsh 1983)
Table 3 displays a collection of literature on the basis of the analytical algorithm with their corresponding authors, year, and the title of the research.
3 Comparative Studies of Damper Placement Methods
Several studies on the comparison of different methods of optimal damper placement have been performed so far. Aguirre et al. (2013) presented a comparison of three optimal search methods, comprising the SSSA (García 2001; Lopez-Garcia 2002), min–max numerical optimization that offers an efficient solution, and the FSDA (Levy and Lavan 2006). The cases demonstrated that the SSSA leads to the approximation of a discrete solution as well as the min–max algorithm, which converges as the steps are gradually reduced to the exact solution. The comparison of various methods could also consider computational cost and practicality. The structural analysis quantity for converging to the final design could limit the computational costs.
Whittle et al. (2012) proposed a comparative study on the efficacy of five damper placement methods: the uniform and stiffness proportional distributions that are known as the simplified approaches, and three other methods including the IPA offered by Takewaki (1997a), the SSSA proposed by Garcia (2001), and the FSDA presented by Levy and Lavan (2006), which are known as advanced methods. Such three advanced approaches have been chosen since they overcome the drawbacks of the computationally intensive approach such as the GA. Considering both irregular and regular moment-resisting frames and 20 ground motions, it was found that all of the methods fulfilled the performance criteria including the reduction in absolute acceleration, residual and maximum inter-story drift. Uniform and stiffness proportional are the straightforward techniques to obtain the best designs, and these methods are verified to meet the design drift limits. However, they cannot still reach the most uniform drift or the best performance reduction distribution for finding an optimal placement of dampers. Generally, the advanced methods represented better performance in comparison with the simplified approaches. The FSDA process appeared to be more appropriate in a computational point of view, among the considered advanced methods and has the minimum complexity. Furthermore, the Takewaki damper placement method was completed faster than the SSSA.
Joshi (2000) compared the GA and the simulated annealing method. The study was carried out on H∞-norm damper position optimization for space-borne interferometers. The H∞-norm allows distinct performance output and diverse disturbance assets that is a unique advantage. This popular procedure includes combinatorial optimization, H∞ cost functional formulation, damper modeling, and optical-structure modeling. Ultimately, it was found that the simulated annealing method is more beneficial, while both methods produce quality solutions. Cimellaro and Retamales (2007) considered different methods for the configuration of viscous dampers. The first method calculates the optimum damper placements and story stiffness required to minify the total transfer function inter-story drift. Another method utilizes the notion of OCT in the form of a linear quadratic regulator procedure gaining matrix. The third process modifies the simplified sequential search algorithm (MSSSA) and combines it with an overall performance index, which calculates optimal damper placements through consideration of absolute floor movements and drifts. The optimum reduction in inter-story drifts was obtained by means of the MSSSA, among the proposed approaches. Nonetheless, as opposed to the other two methods, this approach does not show efficiency in the reduction in peak absolute floor accelerations.
Sonmez (2011a, b) compared the ABCA with other optimization algorithms, and it was confirmed that this method has a better result than other methods such as GA, PSO, and ACO. The rate of convergence of the ABCA regarding the number of feature evaluations performed is as slow as harmony search, GA, and PSO for finding the best designs. The advantages of the ABCA are as follows: simple implementation, requiring few control parameters needed, and robustness. Besides, the ABCA does not need external parameters like mutation rate and crossover, as opposed to the GA. Sonmez et al. (2013) compared the ABCA and SDSA in the case of the optimal damper coefficients and the response of the base shear and the top displacement of the structure. The results verify the efficiency of the ABCA for obtaining the optimal damper placement.
Miguel et al. (2013) demonstrated that heuristic methods such as GA, biologic growth, and evolutionary algorithm are effective tools for structural optimization problems, but comparing metaheuristic methods with heuristic methods indicates that the FA as a metaheuristic algorithm is more precise and useful than heuristic algorithms such as PSO and GA. While the heuristic methods are complicated due to nonlinear dynamics and geometric properties, but it does not give any limitations on the relevance of these methods and they have more capability than traditional techniques.
Garcia (2001) proposed a simplification of the SSA and compared its results with other methods. The efficiency of damper configuration offered by this method was found to be comparable with the efficiency of more complicated methods. SSSA is a simple form of SSA with the same practical features, while its effectiveness is identical. Hence, it was concluded that the SSSA is simple and practical. Silvestri and Trombetti (2007) presented a comparison of the structural performances in shear-type structures retrofitted with viscous dampers to both recorded and stochastic earthquake inputs. This study aimed to identify the appropriate system for supplemental viscous damper which maximizes the dissipative properties under a constraint of an equal “total size.” A physically based solution on the basis of the properties of the classically damped system and a numerical approach based on the GA were chosen for the comparison. The findings obtained by using both methods demonstrated that a damping system on the basis of the mass proportional damping component is accomplished to optimize several performance indexes simultaneously and offered the best overall damping efficiency.
Cetin et al. (2019) proposed the differential evolution (DE) procedure for determining the optimum placement of dampers. To demonstrate the efficiency of the presented method, it was compared with other methods, including UD, the method presented by Aydin (2013) and Takewaki (2000a) considering peak accelerations, peak inter-story drifts ratio (IDR), peak displacements, root mean square (RMS) of accelerations, and displacements. It was concluded that these approaches are very efficient in decreasing the transfer functions but for a different kind of reduction, each procedure was independently superior to each other. Hwang et al. (2013) presented a study on the comparison of different damper distribution procedures including UD, SSSE, SSPD, SSSA, and SSSEES. The research on these five methods reveals no considerable variability in the ground motion responses of the structures equipped with different methods of configuration that lead to the identical damping ratio. The SSSA is the best and worst in the drift control at the stories with dampers and the stories with no dampers, respectively. It was observed that SSSE, SSSEES, and SSSA are the most effective methods regarding the proportionality between the maximum damper forces distribution and damping coefficients distribution. Generally, SSSEES provided the best solution in the case of maximum damper force, total damping coefficient, story drift control, total damper force, architectural concerns, and computational efforts.
Del Gobbo et al. (2018) conducted a comparative study on several damper placement methods, including UD, SPD, SSSE, SSSA, SSSEES, and FSDA. The SSSA and FSDA are iterative process, which are computationally expensive and time-consuming in complex models with many iterations. The non-iterative presented methods lead to the even distribution of dampers, except the top stories with minimal damping. The non-iterative methods have smaller acceleration values than the SSSA and the FSDA at the lower floors. Moreover, the non-iterative methods have better ULS inter-story drift control in comparison with the iterative methods at the lower stories. The iterative methods are used to improve inter-story drift control in the upper stories, where FVDs are concentrated. Repair costs of the SSSA are significantly larger than other methods. The costs of the SSSEES and the FSDA are between the costs of the SSSA and other non-iterative techniques. The SSSA, the FSDA, and the SSSEES encouraged the concentration of dampers in a limited number of stories, which has a negative impact on the building seismic efficiency. The lowest total repair costs are obtained by the SSSE and UD.
Subsequently, Del Gobbo et al. (2020) performed a comparative study on the same methods in their previous study, including UD, SPD, SSSE, SSSA, SSSEES, and FSDA. As predicted, no single method achieved optimum results at all levels for both acceleration and inter-story drifts. It was shown that the SSSA and FSDA provided lower repair costs in comparison with the simple methods. As compared to UD, FSDA produced two to four times the total damping coefficient. As a result, the supplemental damping ratio increases, and the lower repair costs are obtained. Although iterative approaches provide lower repair costs, it is preferable to produce a large damping ratio by UD or SSSE.
Pricopie and Costache (2016) compared four methods including the UD, GA, PSA, and the direct descent method developed by Takewaki (2000b). The least force was created by the UD. The direct descent method presented better results and the PSA and GA produced the largest forces. Drift reductions obtained by the GA and PSA are close and the differences are very small. It has been shown that the PSA produces the best performance in a reasonable run time. The PSA has an appropriate balance between the seismic response reduction and the run time. Due to the considerable run time, the use of GA would be unfeasible for large structure that have more elements. The fastest method is the direct descent approach, but the reduction in seismic response is greater for the PSA and the GA.
Kim and an (2017) compared the analysis results of the GA and a simple intuitive method for obtaining the optimal placement of the friction dampers. Based on the mentioned simple intuitive method, friction dampers are most effective in the locations with the maximum inter-story drift (Marko et al. 2006). Consequently, the GA presented less amount of damper slip force and more efficient solution in comparison with the intuitive technique for finding the optimum damper placement.
4 Discussion of Proposed Methods
This section presents the features of the proposed methods and discusses their advantages and disadvantages. The GA as an evolutionary method has more functional evaluations in comparison with the linearization method. It may be convergent occasionally, and it cannot guarantee convergence, while it has many parameters. Consequently, it is computationally costly. There may be no need for the evaluation of cost function derivatives within the GA. Therefore, this methodology is desirable for complicated problems with a wide variety of parameters. It can go beyond the local minima quickly as it may search widely in the search area. The advantages of the ABCA are as follows: simple implementation, requiring few control parameters, and robustness. Besides, the ABCA does not need external parameters. This method is an iterative approach that does not need any gradient formulation and its derivation. Thereby, the ABCA is a simple, practical and highly effective method for finding optimum size and position of the dampers (Sonmez et al. 2013). The FA has advantage in parallel implementation which leads to the more efficient computational cost. Besides finding optimal damper position, the FA can determine the optimal friction forces, accurately and economically. This algorithm does not require velocities, and its convergence speed is quite high. Having additional control variables, requiring a suitable settings of dependent parameters, and requiring a huge number of iterations are disadvantages of this method.
Takewaki method is not under the effect of ground motions. Features of the optimality criteria are as follows: it can be used for any damping system, proportional or no proportional; FE system can be used for modeling; it does not have an indefinite iterative operation; and it is a systematic algorithm. Therefore, it can be implemented in any structural system. The objective of the GBA is a possible weakness, which is minimizing the sum of a performance indicator rather than the peak value that is a more acceptable damage indictor. This method is independent from seismic response characteristic (Lagaros et al. 2012).
The IPA is not as simple as the direct problem, i.e., developing the specific dynamic factors regarding a defined transfer function. This method needs considerable effort to develop the required programming script. This reasonably efficient method runs independently of ground motions and requires only limited inputs. The choice of the appropriate step size has a significant impact on convergence time (Lagaros et al. 2012). The SDSA does not implement the gradient vector as direction, while it takes full advantage of the derived optimality criteria. It ensures that the condition for optimality are met (Takewaki 1999). It is an effective and simple method for obtaining the optimal configuration of dampers; however, the first- and second-order sensitivity formulations of the objective functions are required for this optimality criteria method (Sonmez et al. 2013).
The FSDA has an advantage of being able to reach a specific objective performance level. Most of the damper placement techniques are not able to achieve a target performance, while they are applied directly. The FSDA also has the benefit of specifically accounting for variability in earthquake data. A uniform distribution of inter-story drift can also be obtained with the unmodified FSDA. The performance index of the FSDA is inter-story drift, which is a major limitation of this method. Maintenance costs are not taken into account and acceleration-sensitive nonstructural systems are neglected. This process is computationally intensive and time-consuming, since it is iterative (Gobbo et al. 2018). The optimal design can be obtained by this method with reliability based on practical ground motion records, an inherent consideration of performance-based design objectives, and a desired uniform damage distribution (Levy and Lavan 2006).
The SSA is allocated to the group of repetitive methodologies due to its reasonable essential physical meaning and simplicity since the dampers are added one after the other to reach a performance objective. Therefore, several time history analyses have to be carried out for the iterative process of the optimal distribution of dampers that might be computationally demanding, while there are many rotational degrees of freedom. The SSSA is suitable for a vast amount of intensive seismic but it needs an excessive amount of time because it has many steps. Takewaki method additionally desires an excessive amount of time as it requires the establishment and repetitive application of a programming script. However, it is optimally efficient and it operates without considering ground motion. The SSSA was an evolution in a sequential method. As a result of that computational effort and simulated ground motions reduced. Its benefits are simplicity and practicality due to its procedure. Using tools that are familiar for designers and discrete damper sizes are taken into consideration inherently. However, the efficiency of the SSSA is dependent on specific ground motions and in conditions with small damping ratios that are sensitive to ground motion traits. Thus, it is not efficient for large ground motions. Moreover, those are effective for linear structures. These options can be stated as obstacles of this technique.
The PSA is suitable for problems where the function cannot be differentiated or is not continuous because it does not need gradients and the objective function to be differentiable (Pricopie and Costache 2016). This method can handle a large number of variables without involving significant computational resources. However, the PSA is subjected to the convergence to local minimums and different initial values lead to various optimization results (Fu and Johnson 2011). The FSDS can be placed in built structures; however, it is not able to reduce forces efficiently, same as other methods. Integer heuristic programming algorithms have simplicity and those are powerful for finding the optimal location, but it may not be globally optimal. The WOBI and the ESPS algorithm, both are classified in heuristic search algorithms. They have simplicity and those are rarely effective for finding an optimal placement, but it will not be globally optimal. Iterative improvement techniques are not successful in global optima, but they can discover local optima. These methods need a mechanism to go further of local optima.
The UD method is simple since the dampers are placed identical at every story. However, this approach is not as effective as other methods for the same total cost of dampers. The most straightforward strategies are uniform and stiffness proportional methods, while they can reduce drift effectively but they are not efficient in other aspects. The SSPD method distributes the damping coefficient to the lower floors. However, no considerable damping forces are detected. As a result, this relatively simple approach is not cost-effective for practical applications (Lin et al. 2017). The SSSEES takes advantages of the SSSE approach and the efficient stories rapidly obtained the damping coefficients. The SSSEES method offers advantages in terms of practical application simplicity, seismic reduction efficiency, and economical design (Lin et al. 2017).
It has to be noted that the advantages of metaheuristic algorithms are as follows (Miguel et al. 2015): (a) gradient information is not essential for this algorithm. Consequently, these algorithms might be useful for those cases without gradient information. (b) If they operate correctly, they could pass further of local minima to a global one. (c) These methods might be non-smooth or discontinuous functions. (d) It does not have only a single solution, and a designer can pick the best alternative from a set of them. (e) Using these techniques is one solution for mixed variable optimization problems.
5 Conclusion
Earthquake-induced responses in structures can be effectively reduced with additional damping devices. The optimal device design and placement are of practical interest, as they have the intrinsic ability to maximize the reduction in structural response while being cost-effective. The results of the damper design also depend on the optimization indices that indicate the response reduction performance. This paper provides a review of optimal damper placement procedures and methods. The literature includes many design theories that focused on various performance indices, design criteria, numerical algorithms, and constraint conditions. Three typical categories of methodologies for optimal damper placement are encompassed, including evolutionary, analytical, and heuristic methods. GA, ABCA, and the FA belong to the evolutionary methods; OCT, GBA, IPA, SDSA, and FSDA are allocated to the analytical group; and SSA, SSSA, PSA, FSDS, UD, SSPD, SSSE, SSSEES, and SPD are assigned to the heuristic methods. Besides, comparison and discussion of the different methods for optimal damper configuration are outlined. It is clear that more studies have been conducted on the GA, GBA, SDSA, and SSA and less studies on the ABCA, FA, SPD, and PSA in the case of damper placement.
Most of the methods presented in the literature are not on the basis of the energy concepts, while energy dissipative systems aim to dissipate the energy from the excitation of the earthquake. Instead, they discuss some response measures, which are only implicitly resultant of the energy dissipation. Initially, dampers are designed with the UD aimed at achieving a specific damping ratio. As a result of this study, the same rates can now be reached with fewer dampers placed more effectively. The most cost-effective solution emerges when the desired inter-story displacement is achieved and the quantity and size of dampers are reduced wherever possible. Depending on the properties of the building and the characteristic of the irritation, dampers are often not necessary on every floor of the building. Different performance objectives lead to diverse damper designs, and damper positions are not limited to a grid-point system to cover the entire structural domain. Methods for defining a discrete optimization problem in complicated structures are also included. The locations and quantity of dampers, as well as damping coefficients, can be optimized simultaneously within these methods. An appropriate method for optimal location and number should be determined based on the characteristic of the structure, earthquake trait, time, cost, simplicity, efficiency, and convergence. It was concluded that the heuristic methods and specifically SSSA are more appropriate compared with other methods because of the simplicity, easiness for implementation, and efficiency for defining the optimal damper distribution with the minimum required computational time. However, the evolutionary methods are also effective but those are time-consuming methods because of the iterative process. Consequently, choosing the best method for determining the optimum placement of dampers can guarantee the safety of structures subjected to earthquake loads. It is recommended to conduct more investigation on the algorithms with less literature in the case of damper placement such as ABCA and FA for the future studies.
References
Abdullah MM (1999) Optimal placement of DVFC controllers on buildings subjected to earthquake loading. Earthq Eng Struct Dyn. https://doi.org/10.1002/(SICI)1096-9845(199902)28:2%3c127::AID-EQE807%3e3.0.CO;2-B
Adachi F, Yoshitomi S, Tsuji M, Takewaki I (2013) Nonlinear optimal oil damper design in seismically controlled multi-story building frame. Soil Dyn Earthq Eng. https://doi.org/10.1016/j.soildyn.2012.08.010
Agrawal YJ (2000) Optimal placement of passive dampers on buildings using combinatorial optimization. J Intell Mater Syst Struct 10:997–1014
Agrawal AK, Yang JN (1999) Optimal placement of passive dampers on seismic and wind-excited buildings using combinatorial optimization. J Intell Mater Syst Struct. https://doi.org/10.1106/YV3B-TP5H-HWQ2-X10K
Aguirre JJ, Almazán JL, Paul CJ (2013) Optimal control of linear and nonlinear asymmetric structures by means of passive energy dampers. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.2211
Akehashi H, Takewaki I (2020) Comparative investigation on optimal viscous damper placement for elastic-plastic MDOF structures: Transfer function amplitude or double impulse. Soil Dyn Earthq Eng. https://doi.org/10.1016/j.soildyn.2019.105987
Apostolakis G, Dargush GF (2010) Optimal seismic design of moment-resisting steel frames with hysteretic passive devices. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.944
Attard TL (2007) Controlling all interstory displacements in highly nonlinear steel buildings using optimal viscous damping. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(2007)133:9(1331)
Aydin E (2012) Optimal damper placement based on base moment in steel building frames. J Constr Steel Res. https://doi.org/10.1016/j.jcsr.2012.07.011
Aydin E (2013) A simple damper optimization algorithm for both target added damping ratio and interstorey drift ratio. Earthq Struct. https://doi.org/10.12989/eas.2013.5.1.083
Aydin E, Boduroglu MH, Guney D (2007) Optimal damper distribution for seismic rehabilitation of planar building structures. Eng Struct. https://doi.org/10.1016/j.engstruct.2006.04.016
Aydin E, Ozturk B, Bogdanovic A, Noroozinejad Farsangi E (2020) Influence of soil-structure interaction (SSI) on optimal design of passive damping devices. Structures. https://doi.org/10.1016/j.istruc.2020.09.028
Bogdanovic A, Rakicevic Z (2019) Optimal damper placement using combined fitness function. Front Built Environ. https://doi.org/10.3389/fbuil.2019.00004
Box GEP (1957) Evolutionary operation: a method for increasing industrial productivity. Appl Stat. https://doi.org/10.2307/2985505
Cetin H, Aydin E, Ozturk B (2019) Optimal design and distribution of viscous dampers for shear building structures under seismic excitations. Front Built Environ. https://doi.org/10.3389/fbuil.2019.00090
Chen G, Wu J (2001) Optimal placement of multiple tune mass dampers for seismic structures. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(2001)127:9(1054)
Cheng FY, Pantelides CP (1988) Optimal placement of actuators for structural control. State University of New York at Buffalo, Buffalo
Chintanapakdee C, Chopra AK (2004) Seismic response of vertically Irregular frames: response history and modal pushover analyses. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(2004)130:8(1177)
Chopra AK (2013) Dynamics of structures, 4th edn. Pearson Prentice Hall
Cimellaro GP (2007) Simultaneous stiffness-damping optimization of structures with respect to acceleration, displacement and base shear. Eng Struct. https://doi.org/10.1016/j.engstruct.2007.01.001
Cimellaro GP, Retamales R (2007) Optimal softening and damping design for buildings. Struct Control Heal Monit. https://doi.org/10.1002/stc.181
Clough R, Penzien J (2003) Dynamics of structures, 3rd edn. Computers and Structures Inc.
Constantinou MC, Tadjbakhsh IG (1983) Optimum design of a first story damping system. Comput Struct. https://doi.org/10.1016/0045-7949(83)90019-6
De Domenico D, Hajirasouliha I (2021) Multi-level performance-based design optimisation of steel frames with nonlinear viscous dampers. Bull Earthq Eng. https://doi.org/10.1007/s10518-021-01152-7
De Domenico D, Ricciardi G, Takewaki I (2019) Design strategies of viscous dampers for seismic protection of building structures: a review. Soil Dyn Earthq Eng. https://doi.org/10.1016/j.soildyn.2018.12.024
De Stefano M, Pintucchi B (2008) A review of research on seismic behaviour of irregular building structures since 2002. Bull Earthq Eng. https://doi.org/10.1007/s10518-007-9052-3
de Silva CW (1981) An algorithm for the optimal design of passive vibration controllers for flexible systems. J Sound Vib. https://doi.org/10.1016/0022-460X(81)90437-5
Del Gobbo GM, Williams MS, Blakeborough A (2018) Comparing fluid viscous damper placement methods considering total-building seismic performance. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.3117
Del Gobbo GM, Blakeborough A, Blakeborough MSX (2020) An assessment of damper placement methods considering upfront damper cost. Proc Inst Civ Eng Struct Build. https://doi.org/10.1680/jstbu.19.00023
Federal Emergency Management Agency (FEMA356), Prestandard and Commentary for the Seismic Rehabilitation of Buildings (FEMA 356), Rehabil. Requir (2000)
Fister I, Yang XS, Brest J (2013) A comprehensive review of firefly algorithms. Swarm Evol Comput. https://doi.org/10.1016/j.swevo.2013.06.001
Fu TS, Johnson EA (2011) Distributed mass damper system for integrating structural and environmental controls in buildings. J Eng Mech. https://doi.org/10.1061/(asce)em.1943-7889.0000211
Fujita K, Yamamoto K, Takewaki I (2010a) An evolutionary algorithm for optimal damper placement to minimize interstorey-drift transfer function in shear building. Earthq Struct. https://doi.org/10.12989/eas.2010.1.3.289
Fujita K, Moustafa A, Takewaki I (2010b) Optimal placement of viscoelastic dampers and supporting members under variable critical excitations. Earthq Struct. https://doi.org/10.12989/eas.2010.1.1.043
Furuya O, Hamazaki H, Fujita S (1998) Proper placement of energy absorbing devices for reduction of wind-induced vibration caused in high-rise buildings. J Wind Eng Ind Aerodyn. https://doi.org/10.1016/S0167-6105(98)00085-3
García DL (2001) A simple method for the design of optimal damper configurations in MDOF structures. Earthq Spectra. https://doi.org/10.1193/1.1586180
Genetic algorithms in search, optimization, and machine learning (1989) Choice Rev. https://doi.org/10.5860/choice.27-0936
Gluck N, Reinhorn AM, Gluck J, Levy R (1996) Design of supplemental dampers for control of structures. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(1996)122:12(1394)
Gomez F, Spencer BF, Carrion J (2021) Simultaneous optimization of topology and supplemental damping distribution for buildings subjected to stochastic excitation. Struct Control Health Monit. https://doi.org/10.1002/stc.2737
Greco R, Marano GC (2016) Optimum design of viscous dissipative links in wall-frame systems. Struct Des Tall Spec Build. https://doi.org/10.1002/tal.1265
Halperin I, Agranovich G, Ribakov Y (2021) Design of optimal feedback for structural control. https://doi.org/10.1201/9780429346330
Hassan AL, Billah AM (2020) Influence of ground motion duration and isolation bearings on the seismic response of base-isolated bridges. Eng Struct. https://doi.org/10.1016/j.engstruct.2020.111129
Holland JH (1975) Adaptation in natural and artificial systems : an introductory analysis with applications to biology, control, and artificial intelligence
Hooke R, Jeeves TA (1961) “Direct search” solution of numerical and statistical problems. J ACM. https://doi.org/10.1145/321062.321069
Hu X, Zhang R, Ren X, Pan C, Zhang X, Li H (2020) Simplified design method for structure with viscous damper based on the specified damping distribution pattern. J Earthq Eng. https://doi.org/10.1080/13632469.2020.1719239
Hussien OS, Elamy MI (2020) Optimal placement of dampers on multistorey frames using dynamic analysis. Strength Mater. https://doi.org/10.1007/s11223-020-00199-2
Hwang SM, Min JS, Hong KW (1995) Optimal design of passive viscoelastic dampers having active control effect for building structures. Trans Korean Soc Noise Vib Eng 5:225–234
Hwang JS, Lin WC, Wu NJ (2013) Comparison of distribution methods for viscous damping coefficients to buildings. Struct Infrastruct Eng. https://doi.org/10.1080/15732479.2010.513713
Jarrahi H, Asadi A, Khatibinia M, Etedali S, Samadi A (2020) Simultaneous optimization of placement and parameters of rotational friction dampers for seismic-excited steel moment-resisting frames. Soil Dyn Earthq Eng. https://doi.org/10.1016/j.soildyn.2020.106193
Jd R (1975) Estimating damping of real structures. J Struct Div 101:1823–1835
Joshi SS (2000) Damper placement for spaceborne interferometers using H∞- norm optimization. Proc Am Control Conf. https://doi.org/10.1109/ACC.2000.876944
Kangda MZ, Bakre S (2021) Performance of Linear and Nonlinear damper connected buildings under blast and seismic excitations. Innov Infrastruct Solut. https://doi.org/10.1007/s41062-021-00502-3
Karaboga D, Basturk B (2007) Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. In: Lecture Notes in Computer Science (Including Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinformatics). https://doi.org/10.1007/978-3-540-72950-1_77
Karaboga D, Basturk B (2008) On the performance of artificial bee colony (ABC) algorithm. Appl Soft Comput J. https://doi.org/10.1016/j.asoc.2007.05.007
Kim J, An S (2017) Optimal distribution of friction dampers for seismic retrofit of a reinforced concrete moment frame. Adv Struct Eng. https://doi.org/10.1177/1369433216683197
Kim J, Kim M, Eldin MN (2017) Optimal distribution of steel plate slit dampers for seismic retrofit of structures. Steel Compos Struct. https://doi.org/10.12989/scs.2017.25.4.473
Lagaros ND, Plevris V, Mitropoulou CC (2012) Design optimization of active and passive structural control system. IGI Global. https://doi.org/10.4018/978-1-4666-2029-2
Landi L, Conti F, Diotallevi PP (2015) Effectiveness of different distributions of viscous damping coefficients for the seismic retrofit of regular and irregular RC frames. Eng Struct. https://doi.org/10.1016/j.engstruct.2015.05.031
Lavan O (2015) Optimal design of viscous dampers and their supporting members for the seismic retrofitting of 3D irregular frame structures. J Struct Eng (united States). https://doi.org/10.1061/(ASCE)ST.1943-541X.0001261
Lavan O, Avishur M (2013) Seismic behavior of viscously damped yielding frames under structural and damping uncertainties. Bull Earthq Eng. https://doi.org/10.1007/s10518-013-9479-7
Lavan O, Dargush GF (2009) Multi-objective evolutionary seismic design with passive energy dissipation systems. J Earthq Eng. https://doi.org/10.1080/13632460802598545
Lavan O, Levy R (2005) Optimal design of supplemental viscous dampers for irregular shear-frames in the presence of yielding. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.458
Lavan O, Levy R (2006a) Optimal peripheral drift control of 3D irregular framed structures using supplemental viscous dampers. J Earthq Eng. https://doi.org/10.1142/S1363246906002931
Lavan O, Levy R (2006b) Optimal design of supplemental viscous dampers for linear framed structures. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.524
Lavan O, Levy R (2009) Simple iterative use of lyapunov’s solution for the linear optimal seismic design of passive devices in framed buildings. J Earthq Eng. https://doi.org/10.1080/13632460902837736
Lemmens N, de Jong S, Tuyls K, Nowe A (2007) A bee algorithm for multi-agent systems: recruitment and navigation combined. Proc. ALAg, an AAMAS Work
Levy R, Lavan O (2006) Fully stressed design of passive controllers in framed structures for seismic loadings. Struct Multidiscip Optim. https://doi.org/10.1007/s00158-005-0558-5
Lewis RM, Torczon V, Trosset MW (2000) Direct search methods: then and now. J Comput Appl Math. https://doi.org/10.1016/S0377-0427(00)00423-4
Lin TK, Hwang JS, Chen KH (2017) Optimal distribution of damping coefficients for viscous dampers in buildings. Int J Struct Stab Dyn. https://doi.org/10.1142/S0219455417500547
Liu W, Tong M, Lee GC (2005) Optimization methodology for damper configuration based on building performance indices. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(2005)131:11(1746)
Lopez-Garcia D (2002) Efficiency of a simple approach to damper allocation in MDOF structures. J Struct Control 19–30
Łukasik S, Żak S (2009) Firefly algorithm for continuous constrained optimization tasks. In: 2009. https://doi.org/10.1007/978-3-642-04441-0_8
Marko J, Thambiratnam D, Perera N (2006) Study of viscoelastic and friction damper configurations in the seismic mitigation of medium-rise structures. J Mech Mater Struct. https://doi.org/10.2140/jomms.2006.1.1001
Mathur S, Deb SK (2003) Seismic response control of RC setback building with friction dampers. Indian Concr J
Miguel LFF, Lopez RH, Miguel LFF (2013) Multimodal size, shape, and topology optimisation of truss structures using the Firefly algorithm. Adv Eng Softw. https://doi.org/10.1016/j.advengsoft.2012.11.006
Miguel LFF, Fadel Miguel LF, Lopez RH (2015) A firefly algorithm for the design of force and placement of friction dampers for control of man-induced vibrations in footbridges. Optim Eng. https://doi.org/10.1007/s11081-014-9269-3
Mitchell M (1998) An introduction to genetic algorithms (complex adaptive systems). MIT Press, Cambridge. https://doi.org/10.1016/S0898-1221(96)90227-8
Mohebbi M, Shakeri K, Ghanbarpour Y, Majzoub H (2013) Designing optimal multiple tuned mass dampers using genetic algorithms (GAs) for mitigating the seismic response of structures. J Vib Control. https://doi.org/10.1177/1077546311434520
Moreschi L (2000) Seismic design of energy dissipation systems for optimal structural performance. Ph.D. dissertation submitted to the faculty of Virginia Polytechnic Institute and State University, Blacksburg, VA, USA
Movaffaghi H, Friberg O (2006) Optimal placement of dampers in structures using genetic algorithm. Eng Comput. https://doi.org/10.1108/02644400610680324
Park KS, Koh HM, Hahm D (2004a) Integrated optimum design of viscoelastically damped structural systems. Eng Struct. https://doi.org/10.1016/j.engstruct.2003.12.004
Park JH, Kim J, Min KW (2004b) Optimal design of added viscoelastic dampers and supporting braces. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.359
Patil MB, Ramakrishna U, Mohan SC (2020) Multi-objective optimisation of damper placement for improved seismic response in dynamically similar adjacent buildings. Sadhana Acad Proc Eng Sci. https://doi.org/10.1007/s12046-020-01419-w
Pekcan G, Mander JB, Chen SS (1999) Design and retrofit methodology for building structures with supplemental energy dissipating systems, New York. Multidisciplinary Center for Earthquake Engineering Research
Pricopie A, Costache A (2016) Viscous damper distribution using genetic algorithms and pattern search optimization. In: 2016. https://doi.org/10.1007/978-3-319-29844-3_25
Rafiee A, Hadidi A, Farahmand Azar B (2021) Reliability-based optimal control of semi-rigid steel frames under simulated earthquakes using liquid column vibration absorbers. Eng Optim. https://doi.org/10.1080/0305215X.2020.1743987
Sánchez WED, Avila SM, de Brito JLV (2018) Optimal placement of damping devices in buildings. J Braz Soc Mech Sci Eng. https://doi.org/10.1007/s40430-018-1238-x
Sanghai S, Pawade P (2021) Optimal placement of friction dampers in building considering nonlinearity of soil. Innov Infrastruct Solut. https://doi.org/10.1007/s41062-020-00395-8
Sarcheshmehpour M, Estekanchi HE, Ghannad MA (2020) Optimum placement of supplementary viscous dampers for seismic rehabilitation of steel frames considering soil–structure interaction. Struct Des Tall Spec Build. https://doi.org/10.1002/tal.1682
Shirkhani A, Farahmand Azar B, Charkhtab Basim M, Mashayekhi M (2021) Performance-based optimal distribution of viscous dampers in structure using hysteretic energy compatible endurance time excitations. Numer Methods Civ Eng. https://doi.org/10.52547/nmce.5.3.46
Shukla AK, Datta TK (1999) Optimal use of viscoelastic dampers in building frames for seismic force. J Struct Eng. https://doi.org/10.1061/(ASCE)0733-9445(1999)125:4(401)
Silvestri S, Trombetti T (2007) Physical and numerical approaches for the optimal insertion of seismic viscous dampers in shear-type structures. J Earthq Eng. https://doi.org/10.1080/13632460601034155
Singh MP, Moreschi LM (2001) Optimal seismic response control with dampers. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.23
Singh MP, Moreschi LM (2002) Optimal placement of dampers for passive response control. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.132
Sivrikaya O, Aydin E, Turker H (2021) Improvement of dynamic response of structures on sandy soil by means of viscous dampers. Iran J Sci Technol Trans Civ Eng. https://doi.org/10.1007/s40996-020-00445-2
Sonmez M (2011a) Discrete optimum design of truss structures using artificial bee colony algorithm. Struct Multidiscip Optim. https://doi.org/10.1007/s00158-010-0551-5
Sonmez M (2011b) Artificial Bee Colony algorithm for optimization of truss structures. Appl Soft Comput J. https://doi.org/10.1016/j.asoc.2010.09.003
Sonmez M, Aydin E, Karabork T (2013) Using an artificial bee colony algorithm for the optimal placement of viscous dampers in planar building frames. Struct Multidiscip Optim. https://doi.org/10.1007/s00158-013-0892-y
Stanikzai MH, Elias S, Matsagar VA, Jain AK (2020) Seismic response control of base-isolated buildings using tuned mass damper. Aust J Struct Eng. https://doi.org/10.1080/13287982.2019.1635307
Takewaki I (1997a) Optimal damper placement for minimum transfer functions. Earthq Eng Struct Dyn. https://doi.org/10.1002/(SICI)1096-9845(199711)26:11%3c1113::AID-EQE696%3e3.0.CO;2-X
Takewaki I (1997b) Efficient redesign of damped structural systems for target transfer functions. Comput Methods Appl Mech Eng. https://doi.org/10.1016/S0045-7825(97)00022-4
Takewaki I (1998) Optimal damper positioning in beams for minimum dynamic compliance. Comput Methods Appl Mech Eng. https://doi.org/10.1016/S0045-7825(97)00221-1
Takewaki I (1999) Displacement-acceleration control via stiffness-damping collaboration. Earthq Eng Struct Dyn. https://doi.org/10.1002/(SICI)1096-9845(199912)28:12%3c1567::AID-EQE882%3e3.0.CO;2-1
Takewaki I (2000a) Optimal damper placement for planar building frames using transfer functions. Struct Multidiscip Optim. https://doi.org/10.1007/s001580050158
Takewaki I (2000b) Optimal damper placement for critical excitation. Probab Eng Mech. https://doi.org/10.1016/S0266-8920(99)00033-8
Takewaki I (2009) Building control with passive dampers: optimal performance-based design for earthquakes. https://doi.org/10.1002/9780470824931
Takewaki I, Uetani K (1999) Optimal damper placement for building structures including surface ground amplification. Soil Dyn Earthq Eng. https://doi.org/10.1016/S0267-7261(99)00007-X
Takewaki I, Yoshitomi S (1998) Effects of support stiffnesses on optimal damper placement for a planar building frame. Struct Des Tall Build. https://doi.org/10.1002/(SICI)1099-1794(199812)7:4%3c323::AID-TAL115%3e3.0.CO;2-L
Takewaki MTI, Yoshitomi S, Uetani K (1999) Non-monotonic optimal damper placement via steepest direction search. Earthq Eng Struct Dyn 28:655–670
Takin K, Doroudi R, Doroudi S (2021) Vibration control of structure by optimising the placement of semi-active dampers and fuzzy logic controllers. Aust J Struct Eng. https://doi.org/10.1080/13287982.2021.1957198
Viola E, Guidi F (2009) Influence of the supporting braces on the dynamic control of buildings with added viscous dampers. Struct Control Heal Monit. https://doi.org/10.1002/stc.234
Whittaker R, Aiken AS, Bergman I, Clark P, Cohen J, Kelly J, Scholl JM (1993) Code Requirements for the Design and Implementation of Passive Energy Dissipation Systems. In: Proceedings of ATC 17–1 Seminar in Seism. Isol. Passiv. Energy Dissipation Act. Control, San Francisco, 1993
Whittle JK, Williams MS, Karavasilis TL, Blakeborough A (2012) A comparison of viscous damper placement methods for improving seismic building design. J Earthq Eng. https://doi.org/10.1080/13632469.2011.653864
Wongprasert N, Symans MD (2004) Application of a genetic algorithm for optimal damper distribution within the nonlinear seismic benchmark building. J Eng Mech. https://doi.org/10.1061/(ASCE)0733-9399(2004)130:4(401)
Wu B, Ou JP, Soong TT (1997) Optimal placement of energy dissipation devices for three-dimensional structures. Eng Struct. https://doi.org/10.1016/S0141-0296(96)00034-X
Yahyazadeh A, Yakhchalian M (2018) Probabilistic residual drift assessment of SMRFs with linear and nonlinear viscous dampers. J Constr Steel Res. https://doi.org/10.1016/j.jcsr.2018.05.031
Yang X (2010) Nature-inspired metaheuristic algorithms. https://doi.org/10.1016/B978-0-12-416743-8.00005-1
Yousefzadeh A, Sebt MH, Tehranizade M (2011) The optimal TADAS damper placement in moment resisting steel structures based on a cost-benefit analysis. Int J Civ Eng (2011)
Zhang RH, Soong TT (1992) Seismic design of viscoelastic dampers for structural applications. J Struct Eng (united States). https://doi.org/10.1061/(ASCE)0733-9445(1992)118:5(1375)
Zhao X, Guo J, Ma H, Ding K (2020) Integrated optimal wind-resistant design of super-tall structures with toggle-brace damper systems. Struct Des Tall Spec Build. https://doi.org/10.1002/tal.1799
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kookalani, S., Shen, D., Zhu, L.L. et al. An Overview of Optimal Damper Placement Methods in Structures. Iran J Sci Technol Trans Civ Eng 46, 1785–1804 (2022). https://doi.org/10.1007/s40996-021-00752-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40996-021-00752-2