
Abstract
Stability analysis of impulsive nonlinear fractional-order system (FOS) is discussed. First, the existence and uniqueness of solutions for FOS is discussed with help of fixed point theory. The nonlinear system is considered with a constant time delay and impulsive effects. Then, novel sufficient conditions to prove the Mittag–Leffler stability (MLS) of FOS are established by using well known mathematical techniques. Also, the results are extended to present finite-time MLS conditions for considered nonlinear FOSs. Finally, examples are given to show the validity of the derived results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Systems modeled with fractional-order calculus have led to the new developments and results which are applied in several fields such as mechanics, biology, economics, biophysics, aerodynamics, signal and image processing. The applications of fractional calculus in viscoelasticity and electrical circuits with fractance have found in literature, see for instance (Debnath 2003; Miller and Ross 1993; Lakshmikantham 2008; Tabouche 2021) and references therein. Particularly, results on some physical problems using fractional-order dynamics found in nonlinear regularized long-wave model (Yavuz and Abdeljawad 2020), Schrodinger–KdV equation (Yavuz et al. 2021), circulant Halvorsen system (Hammouch et al. 2021), and option pricing models (Yavuz 2022). Recently, Naik et al. (2020) studied the COVID-19 model using fractional-order operator and discussed the average absolute relative error between actual cases and the model’s solution for infectious class, also discussed the impact of alternative drugs applied for treating the infected individuals. Fractional-order dynamics based susceptible-infected-recovered epidemic model for predicting the spread of an infectious disease were studied in Dasbasi (2021).
It is noted that when dealing with dynamical systems using varity of differential equations, the first and foremost one is existence of solution (Deep and Tunc 2020). Bohner et al. (2021) studied the fractional Volterra integro-differential equation with multiple kernels and delays. Yavuz et al. (2018) derived the approximate analytical solution for fractional partial differential equations with singular and nonsingular kernels using the Atangana–Baleanu and Liouville–Caputo fractional operators. On the other hand, impulses in differential equations reflects the dynamics of real world problems with unexpected discontinuities and rapid changes at certain instants such as blood flows, heart beats and so on, see Guo and Jiang (2012), Stamova and Tr (2016), & Area and Nieto (2021). Slynko and Tunc (2019) studied the Lyapunov stability of impulsive linear switched systems by constructing an equivalent impulsive system without switching.
In literature, the concepts of stability analysis of impulsive FOS are studied by various approaches; in this paper, we made an attempt to study MLS analysis for nonlinear impulsive FOS with time delays. Stability of solutions is essential one in the qualitative theory of dynamical systems as it addresses the system trajectories under small perturbations of initial conditions. The stability analysis of FOS is more difficult than the classical ones because the derivative of fractional-order is nonlocal and has infirm singular kernels (Agarwal et al. 2015, 2007; Arthi et al. 2019; Baleanu and Wu 2019; Yunquan and Chunfang 2016; Arthi et al. 2021). Recently, many authors focused on the various types of stability analysis for FOS, for example, the q-MLS and direct Lyapunov method for q-FOS was discussed in Li et al. (2018). Hyers-Ulam stability of nonlinear fractional system with delays has been analysed in Khan et al. (2020). Stability of fractional predator-prey system with harvesting rate was presented in Yavuz and Sene (2020). The Mittag–Leffler input stability of FOSs with exogenous disturbances using the Lyapunov characterization were studied in Sene (2020). The finite-time stability results for discrete-time FOSs using Gronwall inequality have been investigated in Wu et al. (2018a). The exponential stability of nonlinear FOS using Hurwitz state matrix and Lyapunov direct method was established in Sene (2019).
Among the different approaches MLS which is generally characterised by Mittag–Leffler functions holds the features of power-law convergence. So, compared to the other methods MLS is more useful in FOSs because the Mittag–Leffler functions are commonly used in fractional calculus. Li et al. (2010) proposed the MLS using fractional Lyapunov direct method. MLS and uniform asymptotic stability of nonlinear impulsive FOS were obtained in Stamova (2015). The MLS of nonlinear FOS with impulses was analysed in Yang et al. (2017). The MLS for impulsive FOSs with instantaneous and non-instantaneous impulses are studied in Agarwal et al. (2017). The MLS of nonlinear FOS by extended the Lyapunov direct method has been studied in Li et al. (2009). The MLS for linear impulsive fractional delayed difference equations was discussed in Wu et al. (2018b). The MLS for coupled system of FOS with impulses were investigated in Li (2015). The MLS and generalized MLS for fractional genetic regulatory networks using the fractional Lyapunov method has been established in Ren et al. (2015).The MLS for nonlinear fractional neutral singular systems were obtained by Li et al. (2012). The finite time stability of delayed FOSs by Mittag–Leffler functions was analyzed in Li and Wang (2018). MLS estimator for nonlinear FOS using linear quadratic regulator approach has been studied in Martnez-Fuentes and Martnez-Guerra (2018).
To the best of our knowledge, MLS of FOS with time delays has not yet been fully analyzed, which motivates our present study. There are few results available in the literature for MLS of FOS with impulsive effects that could not be suitable for impulsive FOSs with time delays. With this motivation, the existence and uniqueness of solutions, MLS analysis of the impulsive nonlinear FOS with time delays are established using the well-known fixed point theorems and Mittag–Leffler approach. Further the main contributions of this paper are outlined as:
-
The existence and uniqueness of solutions for the FOS is discussed with help of fixed point theory.
-
Some novel conditions for MLS of FOS are established for the considered nonlinear system is with time delays and impulses.
-
Further the results are extended to finite-time MLS of considered systems.
Finally, few examples are provided to validate the advantages and effectiveness of the proposed results.
2 Problem Description
Consider the impulsive fractional-order nonlinear system with constant time delay given by
where \(_{0}D^{\nu }_{t}\) denotes the operator Caputo fractional derivative of \(\nu\)-order (\(0<\nu <1\)), \(f(\cdot )\) is a nonlinear function assumed to be Lipshitz continuous, A and B are constant matrices, \(\sigma\) is the constant time delay, \(J=[0,T]\), \(T\in R\), \(0<t_{1}<t_{2}\dots<t_{m}<T\), \(I_k:R^n \rightarrow R^n\) are continuous for \(k=1,2,\dots m\), \(x(t_k^+)= \lim \limits _{\epsilon \rightarrow 0^+}x(t_k+\epsilon )\) and \(x(t_k^-)= \lim \limits _{\epsilon \rightarrow 0^-} x(t_k+\epsilon )\). \(PC^1([-\sigma , T], \;R^n)\) be the Banach space of all piecewise continuous functions from \([-\sigma , T]\) into \(R^n\).
Before presenting our main results, the following hypotheses are introduced.
- \((H_1)\):
-
\(PC^1([-\sigma , T])(\rho )=\left\{ x\in PC^1([-\sigma , T], R^n):\;\left\| x\right\| _\infty \le \rho \right\}\) and \(PC^1(\rho )=\left\{ \phi \in PC^1: \left\| \phi \right\| _1\ \le \rho \right\}\), \(\forall \rho > 0\).
- \((H_2)\):
-
There exists a constant \(l>0\), such that \(\left\| f(t,\psi )\right\| \le l\left\| \psi (t)\right\|\), for almost every \(t\in J\) and all \(\psi \in PC^1(\rho )\).
- \((H_3)\):
-
There exists a constant \(\mu >0\), such that \(\left\| f(t,\psi _1)-f(t,\psi _2)\right\| \le \mu \left\| \psi _1-\psi _2\right\| _1\), for almost every \(t\in J\) and all \(\psi _1,\psi _2 \in PC^1(\rho )\).
- \((H_4)\):
-
Let \(I_k \in C(R^n,R^n)\) maps bounded set into bounded set, for a constant \(M>0\), such that \(\Vert I_k(x(t^{-}_{k}))-I_k(y(t^-_k))\Vert \le M\left\| x-y\right\| _\infty\) for each \(x,y \in PC^1([-\sigma , T])(\rho )\) for \(k=1,2,\ldots m\).
Let us recall some basic definitions and lemmas which are useful in deriving the main results.
Definition 1
(Li et al. 2010) The solution x(t) of system (1) is said to be Mittag–Leffler stable, if
where \(t_{0}\) is the initial time, \(\nu \in (0,1)\), \(b>0\), \(m(0)=0\), \(m(x)\ge 0\) and m(x) is locally lipshitz on \(x(t)\in PC^1([-\sigma , T], R^n)\) with lipshitz constant \(m_{0}\).
Definition 2
(Hei and Wu 2016) The system (1) is finite time stable with respect to \(\left\{ \delta ,\epsilon ,J\right\}\), for \(\delta < \epsilon\), if and only if \(\Vert \phi \Vert< \delta \; \; \Rightarrow \;\; \Vert x(t) \Vert < \epsilon ,\; \forall t \in J\), where \(x(t)\in PC^1([-\sigma , T], R^n)\), \(\Vert \phi \Vert = \sup \limits _{-\sigma \le t \le 0} \Vert \phi \Vert\).
3 Main Results
3.1 Existence and Uniqueness Results
Before discussing the stability results, we discuss the existence, uniqueness for system (1).
Lemma 1
(Lazarevic and Spasic 2009) Let \(0<\nu <1\) and let \(f:J \rightarrow R\) be continuous, the initial value problem
has the following Volterra fractional integral
Then, every solution of (3) is also a solution of (2) and conversely.
Lemma 2
(Feckan et al. 2012) Let \(\nu \in (0,1)\) and \(f:J \rightarrow R\) be continuous. A function \(x\in C(J,R)\) is given by
is only solution of fractional Cauchy problem
Theorem 3
Let \(0<\nu <1\) and \(f:J\times PC^1 \rightarrow R^n\) be Lebesgue measurable function with respect to t on J. A function \(x(t)\in PC^1\left( [-\sigma ,T],R^n\right)\) is a solution of the system (1), if and only if, \(x(t) \in PC^1\left( [-\sigma ,T],R^n\right)\) is a solution of the fractional-order integral equations given by
Proof
Assume x(t) satisfies the system (1). If \(t \in [0,t_1)\) then
with \(x(0)=\phi (0)\). Integrating (5) from 0 to \(t_1\) then
Suppose \(t \in [t_1,t_2)\), then
with \(x(t_1^+)=x(t^1_-)+I_1(x(t_1^-))\). Then, by Lemma 2, we get
Suppose \(t\in [t_2,t_3)\), by Lemma 2, we have
By similar arguments, for \(t\in [t_m,T]\), one can have
Conversely, let x(t) satisfies (4). If \(t\in [0,t_1)\) then using the fact that \(_0D^\nu _t\) is the left inverse of \(I^\nu _t\), we have (5). If \(t \in [t_k,t_{k+1})\),\(k=1,2,\ldots m\) then using the ideas of the Caputo derivative, we obtain
and \(\Delta x(t^-_k)=I_k(x(t^-_k))\).
Next, to discuss the uniqueness of system (1), define a mapping for \(x\in PC^1\left( [-\sigma ,T],R^n\right)\) as
Theorem 4
Assume (\(H_1\)), (\(H_2\)), (\(H_3\)) and (\(H_4\)) hold, then the system (1) has at least one solution on J provided that
where \(M=\max \left\{ \left\| I_k(x(t_k^-))\right\| : \left\| x\right\| _{\infty } \le \rho \right\} , \;k=1,2,\ldots m.\)
Proof
From Assumption (\(H_1\)) it is clear that \(PC^1([-\sigma , T])(\rho )\) is a closed, bounded and convex subset of \(PC^1([-\sigma , T], R^n)\). Now, we use Schauder fixed point theorem to prove that F in (6) has a fixed point.
Step 1. F maps \(PC^1([-\sigma , T])(\rho )\) into \(PC^1([-\sigma , T])(\rho )\).
According to Holder inequality and the condition (\(H_2\)), for \(t\in [0,t_1)\)
Similarly, for \(t \in [t_k, t_{k+1}),\; k=1,2,\ldots m\)
Combining (7), (8) and noting that \(\left\| (Fx)(t)\right\| =\left\| \phi (t)\right\| \le \left\| \phi \right\| _1 \le \rho ,\) for \(t \in [-\sigma , 0],\) it yields \(\left\| (Fx)(t)\right\| _\infty \le \rho .\) Hence \(F:PC^1([-\sigma , T])(\rho ) \rightarrow PC^1([-\sigma , T])(\rho ).\)
Step 2. F is continuous.
Let \({x_l}\) be a sequence such that \(x_l \rightarrow x\) on \(PC^1([-\sigma , T])(\rho )\), by the continuity of \(f(t,\psi )\) with respect to \(\psi\), \(I_k(\gamma )\) with respect to \(\gamma\) and \(x(\zeta )\) with respect to \(\zeta\), respectively, it is easy to see that \(f(t,x_l(t)) \rightarrow f(t, x(t))\), \(t \in J\), \(I_k(x_l) \rightarrow I_k(x)\), \(k=1,2,\ldots m\) on \(PC^1([-\sigma , T])(\rho )\) and \(x_l(t) \rightarrow x(t)\), \(t \in J\) as \(l \rightarrow \infty\).
For \(t \in [0, t_1)\)
Using Step 1, we get
By similar arguments, for \(t \in [t_k,t_{k+1}),\; k=1,2,\ldots m\)
Since \(l \rightarrow \infty\), \(f(t,x_l(t))\) convergent to f(t, x(t)), \(I_k(x_l)\) is convergent to \(I_k(x)\), \(k=1,2,\ldots m\) and \(x_l(t)\) is convergent to x(t) for \(t \in J\). Combining (9) and (10), noting that \(\left\| (Fx_l)(t)-(Fx)(t)\right\| =\left\| \phi (t)-\phi (t)\right\| =0\) for \(t \in [-\sigma , 0]\), it yields \(\left\| (Fx_l)(t)-(Fx)(t)\right\| _\infty \rightarrow 0\) as \(l \rightarrow \infty\). Therefore F is continuous.
Step 3. F maps bounded sets into equicontinuous sets of \(PC^1([-\sigma , T],R^n)\).
Since \(PC^1([-\sigma , T])(\rho )\) be a bounded set and \(x \in PC^1([-\sigma , T])(\rho )\), obviously Fx is equicontinuous on \([-\sigma ,0]\). For any arbitrary \(\theta _1\), \(\theta _2 \in [0,t_1)\), \(\theta _1 < \theta _2\), based on the Holder inequality and Step 1, we have
as \(\theta _2 \rightarrow \theta _1\), the RHS of above inequality tends to zero. Then Fx is equicontinuous on \([0,t_1)\).
By similar arguments, for the time interval \([t_k,t_{k+1})\), we obtain
as \(\theta _2 \rightarrow \theta _1\). This shows that Fx is equicontinuous on \([t_k,t_{k+1})\) for \(k=1,2,\ldots m.\)
In other words, since \(F(PC^1([-\sigma , T]))(\rho ) \subset PC^1([-\sigma , T])(\rho )\) is uniformly bounded according to Step 1, then \(A(PC^1([-\sigma , T]))(\rho )\) is a relatively compact subset of \(PC^1([-\sigma , T], R^n)\). Thus
\(F:PC^1([-\sigma , T])(\rho ) \rightarrow PC^1([-\sigma , T])(\rho )\) is completely continuous.
Therefore, in the view of Steps 1-3 and by Schauder fixed point theorem, one can conclude that F has a fixed point in \(PC^1([-\sigma , T])(\rho )\) and which is a solution of system (1) on J. \(\square\)
Theorem 5
Assume (\(H_1\)), (\(H_2\)), (\(H_3\)) and (\(H_4\)) hold, then the system (1) has a unique solution on J, provided the following inequality holds
Proof
Let F be a function defined by (6). Then \(F:PC^1([-\sigma ,T])(\rho ) \rightarrow PC^1([-\sigma ,T])(\rho )\).
Now, we apply the Banach contraction principle to prove F has a unique fixed point.
According to the condition (\(H_3\)) and inequality (11), for arbitrary \(x_1, x_2 \in PC^1([-\sigma ,T])(\rho ),\) for \(t \in [-\sigma ,0]\)
Suppose \(t \in [0,t_1)\)
By similar arguments for \(t \in [t_k,t_{k+1})\), \(k=1,2,\ldots m,\) we have
Since \(c<1\), it follows that F is strict contraction. Hence by Banach fixed point theorem it can be concluded that there exists a unique fixed point and which is the unique solution of system (1). \(\square\)
3.2 Mittag–Leffler Stability
In this section, we prove the MLS of system (1) by using Laplace transform.
Theorem 6
Let \(x(t) \in PC^{1} ([-\sigma , T], R^{n})\) in (4) is a solution of the system (1) and satisfies
where \(\eta\) =\(\frac{ l+\left\| A\right\| +\left\| B\right\| }{1-nM}\), then the system (1) is Mittag–Leffler stable.
Proof
In general, let \(t\in \left. \left[ t_k,t_{k+1}\right. \right)\) then
taking norm on both sides
By Assumptions (\(H_2\)) and (\(H_4\)), we have
For any function \(Q(t)>0\), (12) becomes
Taking Laplace transform on both sides
where \(\eta = \frac{ l+\left\| A\right\| +\left\| B\right\| }{1-nM}\). Next, taking Inverse Laplace transform on both sides, one can have
where \('*'\) denotes the convolution operator and the term \(t^{-1}E_\nu \left( \eta t^\nu \right) \ge 0\).
Then, it then follows that
Therefore, from Definition 1, the solution of the system (1) is Mittag–Leffler stable. \(\square\)
It is well-known that the concept of short time stability (or) finite-time stability has attracted much attention because it has a special property that for given bounded initial condition, the system state does not exceeds some bounds during the time interval. Considering this, now the above MLS is extended to finite-time MLS using the following corollary.
Corollary 1
The system (1) is finite time stale with respect to \(\left\{ \delta ,\epsilon ,J\right\}\), \(\delta < \epsilon ,\) if and only if, the conditions
(\(S_1\)) There exists a constant \(M>0\), such that \(\left\| I_k(x(t^-_k))\right\| \le M\epsilon\), for \(k=1,2,\ldots m\) and any \(x\in PC^1\left( [-\sigma ,T],R^n\right)\),
(\(S_2\))\(\ \left\{ nM\epsilon +\delta \left[ 1+\frac{\left\| \phi \right\| \sigma ^\nu }{\Gamma (\nu +1)}\right] E_\nu (\eta t^\nu )\right\} < \epsilon\), where \(\eta\) =\(\frac{ l+\left\| A\right\| +\left\| B\right\| }{1-nM}\)
hold.
Proof
Under the condition (\(S_1\)) and by Theorem 6, we have
Now, it is easy to see that
By Definition 2, the solution of the system (1) is finite-time Mittag–Leffler stable. \(\square\)
Remark 1
It is noted that the core ideas and proof process in deriving the results in Theorem’s 4 & 5 on the existence and uniqueness of solutions of the considered time-delay system is followed from the similar ideas used in Guo and Jiang (2012) for a system without time-delay. Also, the MLS results proposed in Theorem 6 are new and different from the finite-time stability results discussed for an evolution system in Hei and Wu (2016). So this paper discloses the new results for time-delay systems which are not discussed in the existing literature.
4 Numerical Examples
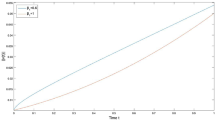
4.1 Example 1
Consider the following impulsive time delay fractional-order system
It is easy to see \(f(t,x(t))=\begin{bmatrix} \tanh x_1(t) \\ \tanh x_2(t)\end{bmatrix}\) with \(l=\mu =1\), \(A=\begin{bmatrix} 0.2 &{} 0\\ 0&{} 0.2\end{bmatrix}\) with \(\Vert A\Vert =0.2\),
\(B=\begin{bmatrix} 0.02 &{} -0.01\\ -0.01&{} 0.02\end{bmatrix}\) with \(\Vert B\Vert =0.0224\), \(\sigma =0.04\).
It is easy to see that all Assumptions (\(H_1\)), (\(H_2\)), (\(H_3\)) and (\(H_4\)) are hold. Now, for the choice of \(n=10\), \(\delta = 0.5\), \(\epsilon = 1\), it is easy to see the proposed conditions in Theorems 4–6 are satisfied. Hence, it can conclude that the unique solution of above system exist and which is MLS.
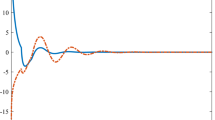
4.2 Example 2
Consider the impulsive time delay fractional-order system
Let \(n=10\), \(\delta = 0.3\), \(\epsilon = 0.4\), then we can verify that \((S_1)\) in Corollary 1 is satisfied for the considered system. So we can calculate that the above system is finite-time MLS and by solving the inequality in (\(S_2\)), the estimated time is obtained as \(T\approx 0.3719\).
5 Conclusion
The qualitative analysis of nonlinear impulsive FOSs with time delays has been investigated, particularly on the existence, uniqueness and MLS of considered systems. The proposed results are new and have some novel ideas as the delay dependent conditions were established using the Laplace transforms and fractional-order calculus. Further, the results are extended to finite-time MLS of the considered FOSs. Finally, some examples are provided to validate the theoretical analysis. In practice the delay in the system design will be of time-varying in nature and also the nonlocal conditions in the initial data gives the better approximation in many physical problems, extending the results for these cases will be our future research directions.
Data Availability Statement
Data sharing not applicable as no datasets were generated or analyzed during the current study.
References
Agarwal OP, Sabatier J, Machado JAT (2007) Advances in fractional calculus. Springer, Berlin
Agarwal R, Hristova S, O’Regan D (2015) Lyapunov functions and strict stability of caputo fractional differential equations. Adv Differ Equ 2015:346
Agarwal R, Hristova S, O’Regan D (2017) Mittag–Leffler stability for impulsive Caputo fractional differential equations. Differ Equ Dyn Syst 11:1–17
Area I, Nieto JJ (2021) Fractional-order logistic differential equation with Mittag–Leffler type kernel. Fractal Fract 5(4):273
Arthi G, Park JH, Suganya K (2019) Controllability of fractional order damped dynamical systems with distributed delays. Math Comput Simul 165:74–91
Arthi G, Brindha N, Ma Y-K (2021) Finite-time stability of multiterm fractional nonlinear systems with multistate time delay. Adv Differ Equ 2021:102
Baleanu D, Wu GC (2019) Some further results of the Laplace transform for variable order fractional difference equations. Fract Cal Appl Anal 22:1641–1654
Bohner M, Tunc O, Tunc C (2021) Qualitative analysis of Caputo fractional integro-differential equations with constant delays. Comput Appl Math 40:214
Dasbasi B (2021) Stability analysis of an incommensurate fractional-order SIR model. Math Model Numer Simul Appl 1:44–55
Debnath L (2003) Recent applications of fractional calculus to science and engineering. Int J Math Math Sci 54:3413–3442
Deep A, Tunc DC (2020) On the existence of solutions of some non-linear functional integral equations in Banach algebra with applications. Arab J Basic Appl Sci 27:279–286
Feckan M, Zhou Y, Wang J (2012) On the concept and existence of solution for impulsive fractional differential equations. Commun Nonlinear Sci Numer Simul 17:3050–3060
Guo TL, Jiang W (2012) Impulsive fractional functional differential equations. Comput Math Appl 64:3414–3424
Hammouch Z, Yavuz M, Ozdemir N (2021) Numerical solutions and synchronization of a variable-order fractional chaotic system. Math Model Numer Simul Appl 1:11–23
Hei X, Wu R (2016) Finite-time stability of impulsive fractional-order systems with time-delay. Appl Math Model 40:4285–4290
Khan H, Tunc C, Khan A (2020) Stability results and existence theorems for nonlinear delay-fractional differential equations with \(\Phi _p\)-operator. J Appl Anal Comput 10:584–597
Lakshmikantham V (2008) Theory of fractional functional differential equations. Nonlinear Anal Theory Methods Appl 69:3337–3343
Lazarevic MP, Spasic AM (2009) Finite-time stability analysis of fractional order time-delay systems: Gronwall’s approach. Math Comput Model 49:475–481
Li M, Wang J (2018) Exploring delayed Mittag–Leffler type matrix functions to study finite time stability of fractional delay differential equations. Appl Math Comput 324:254–265
Li Y, Chen Y, Podlubny I, Cao Y (2009) Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 45:1965–1969
Li Y, Chen Y, Podulbny I (2010) Stability of fractional-order nonlinear dynamic system: Lyapunov direct method and generalized Mittag–Leffler stability. Comput Math Appl 15:1810–1821
Li X, Liu S, Jiang W, Zhou X (2012) Mittag–Leffler stability of nonlinear fractional neutral singular systems. Commun Nonlinear Sci Numer Stimul 17:3961–3966
Li H et al (2015) Global Mittag–Leffler stability of coupled system of fractional-order differential equations on network. Appl Math Comput 270:269–277
Li X, Liu S, Jiang W (2018) q-Mittag–Leffler stability and Lyapunov direct method for differential systems with q-fractional order. Adv Differ Equ 2018:78
Martnez-Fuentes O, Martnez-Guerra R (2018) A novel Mittag–Leffler stable estimator for nonlinear fractional-order systems: a linear quadratic regulator approach. Nonlinear Dyn 94:1973–1986
Miller KS, Ross B (1993) An introduction to fractional calculus and fractional differential equations. Wiley, New York
Naik PA, Yavuz M, Qureshi S, Zu J, Townley S (2020) Modeling and analysis of COVID-19 epidemics with treatment in fractional derivatives using real data from Pakistan. Eur Phys J Plus 135:1–42
Ren F, Cao F, Cao J (2015) Mittag–Leffler stability and generalized Mittag–Leffler stability of fractional-order gene regulatory networks. Neurocomputing 160:185–190
Sene N (2019) On the stability analysis of the fractional nonlinear systems with Hurwitz state matrix. J Fract Cal Appl 10:1–9
Sene N (2020) Mittag–Leffler input stability of fractional differential equations and its applications. Am Inst Math Sci 13:867–880
Slynko V, Tunc C (2019) Stability of abstract linear switched impulsive differential equations. Automatica 107:433–441
Stamova IM, Stamov GT (2016) Functional and impulsive differential equations of fractional-order. A Science Publisher’s Books, Qualitative analysis and applications
Stamova IM (2015) Mittag–Leffler stability of impulsive differential equations of fractional order. Q Appl Math 73:525–535
Tabouche N et al (2021) Existence and stability analysis of solution for Mathieu fractional differential equations with applications on some physical phenomena. Iran J Sci Technol Trans A Sci 45:973–982
Wu G, Baleanu D, Zeng S (2018a) Finite-time stability of discrete fractional delay systems: Gronwall inequality and stability criterion. Commun Nonlinear Sci Numer Simul 57:299–308
Wu G, Baleanu D, Huang L (2018b) Novel Mittag–Leffler stability of linear fractional delay difference equations with impulse. Appl Math Lett 82:71–78
Yang X, Li C, Huang T, Song Q (2017) Mittag–Leffler stability analysis of nonlinear fractional-order systems with impulses. Appl Math Comput 293:416–422
Yavuz M (2022) European option pricing models described by fractional operators with classical and generalized Mittag–Leffler kernels. Numer Methods Partial Differ Equ 38:434–456
Yavuz M, Abdeljawad T (2020) Nonlinear regularized long-wave models with a new integral transformation applied to the fractional derivative with power and Mittag–Leffler kernel. Adv Differ Equ 2020:1–18
Yavuz M, Sene N (2020) Stability analysis and numerical computation of the fractional predator-prey model with the harvesting rate. Fract Fraction 4:35
Yavuz M, Ozdemir N, Baskonus HM (2018) Solutions of partial differential equations using the fractional operator involving Mittag–Leffler kernel. Eur Phys J Plus 133:1–11
Yavuz M, Sulaiman TA, Yusuf A, Abdeljawad T (2021) The Schrodinger–KdV equation of fractional order with Mittag–Leffler nonsingular kernel. Alex Eng J 60:2715–2724
Yunquan K, Chunfang M (2016) Mittag–Leffler stability of fractional-order Lorenz and Lorenz-family systems. Nonlinear Dyn 83:1237–1246
Acknowledgements
Not applicable.
Funding
The work of Yong-Ki Ma was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korea government (MSIT) (No. 2021R1F1A1048937).
Author information
Authors and Affiliations
Contributions
The authors declare that their contributions are equal. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mathiyalagan, K., Ma, YK. Mittag–Leffler Stability of Impulsive Nonlinear Fractional-Order Systems with Time Delays. Iran J Sci 47, 99–108 (2023). https://doi.org/10.1007/s40995-022-01375-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40995-022-01375-6