
Abstract
In this research, the constant type of neutral delay Volterra integro-differential equations (NDVIDEs) are currently being resolved by applying the proposed technique in numerical analysis namely, two-point two off-step point block multistep method (2OBM4). This new technique is being applied in solving NDVIDE, identified as a hybrid block multistep method, developed using Taylor series interpolating polynomials. To complete the algorithm, two alternative numerical approaches are introduced to resolve the integral and differential parts of the problems. Note that the differentiation is approximated by the divided difference formula while the integration is interpolated using composite Simpson’s rule. The proposed method has been analysed thoroughly in terms of its order, consistency, zero stability and convergence. The suitable stability region for 2OBM4 in solving NDVIDE has been constructed and the stability region is built based on the stability polynomial obtained. Consequently, numerical results are presented to demonstrate the effectiveness of the proposed 2OBM4.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent years, the neutral delay Volterra integro-differential equation (NDVIDE) has seen significant advances in many disciplines, such as biological and physical sciences. This has been an important topic of study in the literature for many years in real-life handling phenomena, specifically on its implementation in science engineering. As known by many authors, it is possible to observe the delay as a transport delay. A neutral type of DVIDE typically emerges in modelling of linked oscillatory systems. Meanwhile, oscillators are interconnected in a comparative example and allow energy transfer, [19]. Other than that, the neutral class delay differential and integro-differential equations are particularly pertinent. Their implementation in complex systems (mathematical models defining the oscillation of a clock pendulum, the water stream and the number of fish in a lake each spring are examples of time-dependent points in geometric space), electrical properties, and mechanics is growing in popularity in applied mathematics, [2]. Moreover, neutral-type models explain certain biological mechanisms such as growth, death and birth. The related phenomenon of cell growth with delays in its development is denoted below,
for \(f:{\mathbb{R}}\times {\mathbb{R}}\to {\mathbb{R}}\) and \(K:{\mathbb{R}}\times {\mathbb{R}}\times {\mathbb{R}}\times {\mathbb{R}}\to {\mathbb{R}}\). The overall idea of the general form is originally taken from [3]. Equation (1) is NDVIDE with a constant delay while \(y\left(x\right)=\phi \left(x\right)\) is the given initial value. When \(\tau =0\), Eq. (1) reduces to a standard initial value problem (IVP). The expression of \(y\left(\alpha \right)\) and \({y}^{\mathrm{^{\prime}}}\left(\alpha \right)\) are the delay solutions where the delay argument is \(\alpha =x-\tau \). Note that the value of \(\tau \) has its own interpretation. For instance, the biological interpretation for \(\tau \ge 0\) means the average time it takes for cells to divide in each human body. Neutral-type delay differential equations are also increasingly applied in industry in the context of engineering [17].
Numerical solutions to delay integro-differential equations of the neutral type under the initial condition have been discovered by several authors. A series of neutral delay problems have been solved by Jackiewicz where one of the monographs is related to the multistep Adams–Moulton method, [27] to solve NDVIDE problems. A general convergence theorem is presented and the order of convergence (EOC) of these methods is examined. Obviously, the present method can be extended onto any multistep method to solve the problems for further studies. Afterwhile, the explicit and implicit continuous Runge–Kutta methods were investigated for solving the NDVIDE by [25]. The numerical results suggest that the method can generate a continuous approximate solution with a global error bound by a minor multiple of the chosen error tolerance. Subsequently, a recent advance and some open problems in the numerical solution of NDVIDE have been described, [7]. Related functional equations and theoretical and computational aspects of collocation methods for their solutions are also described. Despite all the theories, more detailed descriptions of the precise theoretical and computational aspects relating to the NDVIDE are refrained from giving due to limitations of space that the method owned.
Later, the approximate solution of a linear NDVIDE, including three types of equations, could be discovered using Galerkin’s technique using Bernstein polynomial as the basis function, [12]. Some important formulas concerning the derivative of orthogonal polynomials: Bernstein polynomial has been derived, which are essential to the numerical computations. Afterwards, a numerical method for solving DVIDE problems of neutral type based on a spectral approach was provided, [12]. The method is readily extended to nonlinear DVIDE of neutral type. Consequently, collocation methods were applied to solve Volterra-type functional integral equations with non-vanishing delays, [26]. The monograph investigates the existence, uniqueness, regularity properties and particularly the local representation of solutions for general Volterra functional integral equations with non-vanishing delays. However, the related results for Volterra functional integral equations with nonlinear delay remain to be investigated. Subsequently, the backward substitution method has been presented by [22] where the proposed method consists of replacing the initial equation with an approximate equation with an exact analytic solution with a set of free parameters. Only the polynomial functions are utilised in this paper. However, trigonometric and radial basis functions also can be used in the framework of the proposed technique. Finally, [18] proposed an explicit third-order block multistep method to solve constant-type NDVIDE and retarded delay Volterra integro-differential equations (RDVIDE) problems, where the approach is derived using the Taylor series. Apparently, the method can be derived into a higher-order method technique.
A closer look at the literature, reveals several gaps and shortcomings in the multistep method. The hybrid multistep block technique can be utilised to solve various differential equations, [17]. Nevertheless, there has not been much study done on the performance and implementation of numerical algorithms in NDVIDE. Hence, this research aims to develop a hybrid multistep block method to solve DVIDE of neutral type. This has not been previously investigated in the literature. Furthermore, the off-step points were adapted in the block technique with additional difference interpolating method and quadrature rule as the iterative way to innovate the approximate solutions will be emphasised in this manuscript. Therefore, this research focuses on developing the proposed method for resolving the problems.
2 Methodology
Based on [9], an off-step method is an extension of a multistep method that involves off-point in the general form of \(f\left(x,y\left(x\right),{\int }_{x-\tau }^{x}K\left(x,y\left(x\right),y\left(\alpha \right),{y}^{\mathrm{^{\prime}}}\left(\alpha \right)\right)dx\right)\). A Taylor series polynomial is applied to formulate the fourth-order two-point two off-step point block multistep method (2OBM4). A \(k-\) step hybrid formula based on,
is expanded as shown in subsection Derivation of method to derive 2OBM4 where \({\alpha }_{k}=1\), \({\alpha }_{0}\) and \({\beta }_{0}\) are not equals to zero and \(v\notin 0,1,\dots ,k\), as stated in [8]. In this research, the off-step method is illustrated as depicted in Fig. 1

Hybrid multistep block method
The first \({k}^{th}\) block compromise \({x}_{n-2},{x}_{n-1}\) and \({x}_{n}\) with \({x}_{n-2}\) serving as the initial point and \({x}_{n}\) serving as the last point in the current block, as displayed in Fig. 1. The approximated solutions in the \({k}^{th}\) block will be the initial values for \({\left(k+1\right)}^{th}\) block. The iteration of the off-step \({y}_{n+\frac{1}{2}}\) will be estimated first before evaluating \({y}_{n+1},{y}_{n+\frac{3}{2}}\) and \({y}_{n+2}\). The same strategy will be applied to estimate the next block until the interval is completed. This method attempts to solve the problem synchronously.
2.1 Derivation of Method
The derivation of the first point predictor formula for the implicit hybrid block multistep method (2OBM4) is illustrated below,
where \(\alpha_{0}\) will be substituted with \(- 1\),
Every term of \(y\left(x\right)\) and its derivative in Eq. (4) will be expanded using Taylor expansion,
By substituting Eq. (5) into Eq. (4), the obtained formula will now be given by,
Each term needs to be collected in order to equate both the left and right-hand sides as follows,
Subsequently, after equating both hand sides, the equation becomes,
where \({\beta }_{0}=\frac{5}{12},{\beta }_{1}=-\frac{4}{3},{\beta }_{2}=\frac{23}{12}\). By letting \(n=n-2\), the first point predictor formula is obtained as follows,
where \({{\text{f}}}_{{\text{n}}}={{\text{y}}}^{\mathrm{^{\prime}}}\left({{\text{x}}}_{{\text{n}}}\right),{{\text{f}}}_{{\text{n}}-1}={{\text{y}}}^{\mathrm{^{\prime}}}\left({{\text{x}}}_{{\text{n}}-1}\right)\) and \({{\text{f}}}_{{\text{n}}-2}={{\text{y}}}^{\mathrm{^{\prime}}}\left({{\text{x}}}_{{\text{n}}-2}\right).\) The procedure for deriving the second point predictor formula, \({y}_{n+2}^{p}\) for 2OBM4 is the same as the previous formula where the general form is given by,
The following formula is obtained after a certain procedure,
The proposed method, 2OBM4 contains two off-step points given as \(y_{{n + \frac{1}{2}}}\) and \(y_{{n + \frac{3}{2}}}\) where the general form of the first off-step point, \(y_{{n + \frac{1}{2}}}\) is given as,
while the general form for the second off-step point, \(y_{{n + \frac{3}{2}}}\) is given by,
After repeating the same strategies, the formulae for both off-point predictors are,
The first point corrector formula will also be derived since the suggested hybrid block multistep technique incorporates both predictor and corrector equations where the general formula is,
By letting \({\alpha }_{0}=-1\), and expanding each term using the Taylor series, we obtain,
Consequently, after substituting Eq. (16) into the general form, and collecting the terms, we obtain,
where \({\beta }_{3}=-\frac{1}{12},{\beta }_{1}=\frac{1}{60},{\beta }_{\frac{5}{2}}=1,{\beta }_{\frac{7}{2}}=\frac{1}{15}\). Letting \(n=n-2\), the first point corrector formula is obtained as below,
The second point corrector formula for 2OBM4 is formulated similar to the previous first point corrector and is obtained as shown below,
For instance, the derived predictors and correctors formulae are collected and summarised as follows,
Predictor formulae,
Corrector formulae,
where the proposed method, 2OBM4 will be applied in solving NDVIDE with constant delay type.
2.2 Order and Error Constant of Method
Based on [20], Definition 1 is used to obtain the suggested order and error constant for 2OBM4. The order of a numerical method measures the change in the error of a numerical solution as the step size is decreased.
Definition 1. The proposed off-step block method Eq. (21) is of order \(s\) if, \({C}_{0}={C}_{1}=\dots ={C}_{s}=0\) while its error constant is \({C}_{s+1}\ne 0\) where \(s=2,3\dots \).
The corrector formulae of 2OBM4 in Eq. (21) may be written to satisfy the linear hybrid multistep block method denoted in Eq. (2). By letting \(k=4\), the corrector formulae can be rewritten as shown in the matrix form,
where
As stated by the hybrid method 2OBM4 is of order \(s\) when following Definition 1 where
Based on the above evaluation, as \({C}_{s}={C}_{0}={C}_{1}={C}_{2}={C}_{3}={C}_{4}=0\), 2OBM4 has an error constant of \({C}_{s+1}={C}_{5}=\left[\begin{array}{c}-\frac{1}{180}\\ \hspace{0.33em}\hspace{0.33em}\frac{1}{360}\end{array}\right]\) where \({C}_{s+1}\ne 0\) and is of order four. The importance of determining the order of the method is to identify which order is needed to achieve the desired accuracy.
2.3 Consistency and Zero Stability of Method
Referring to [8], a multistep method is consistent if both conditions stated in Eq. (25) are satisfied.
Definition 2. If the order is greater than one, \(s\ge 1\), the multistep method Eq. (2) is consistent.
The proposed method is also consistent if and only if,
Thus, both conditions are satisfied since condition (i) is already proven in the order of the method section while (ii) is satisfied when,
Based on [14], the proposed block method is zero-stable when it fulfils Definition 3 given below,
Definition 3. A multistep method Eq. (2) is zero-stable if the modulus of the first characteristic polynomial’s roots in Eq. (26) are not greater than one,
Therefore,
where the roots for the first characteristic polynomial in Eq. (26) are:
When any method remains bounded as \(h\) approaches 0, then the method is said to be zero-stable. The boundedness of a certain method is determined based on the root obtained between 0 and 1. Other than that, the proof is shown as the stability region obtained for the proposed 2OBM4 is later bounded in the Stability analysis section. Based on [8], the linear multistep method converges if both conditions for consistency and zero stability are satisfied.
2.4 Convergence of Method
According to [19], the convergence analysis for 2OBM4 is illustrated based on the theorem below where the conditions are,
Theorem 1
The approximate solutions of Eq. (21) converge to its exact solution.
Proof
A linear multistep method with an off-step point Eq. (21) is convergent if the following two conditions are fulfilled:
From the conditions above, if the proposed method finally approaches the exact term which is denoted as \({y}_{n+i}^{*}\) where \(i=0,1,2,\dots \), then the method is suitable to be applied as it perfectly converges. Taking the approximate solution for the corrector of 2OBM4 as shown in Eq. (21), while the exact solution is:
By applying the Lipschitz condition,
Subtracting the exact and approximate solutions for both points will produce the first point formula,
while the second point formula is given by,
Hence, adopting \({y}_{n+1}^{*}-{y}_{n+1}={q}_{n+1}\), \({y}_{n+2}^{*}-{y}_{n+2}={q}_{n+2}\), \({y}_{n}^{*}-{y}_{n}={q}_{n}\), … produces,
As \(h\) tends to zero, we obtain,
Thus, it has been concluded that the proposed method converges as it approaches the exact solution.
2.5 The Uniqueness Theorem
Based on [1], we have the following theorem:
Theorem 2
Consider the NDVIDE denoted in Eq. (1). Assume that \(f\) and \(K\) are continuous and satisfy the Lipschitz condition,
for every \(\parallel x-\alpha \parallel \le b,\parallel {y}_{1}\parallel <\infty ,\parallel {y}_{2}\parallel <\infty ,\) and \(b>0\). Then the IVP in Eq. (1) has a unique solution.
Proof
Integrating Eq. (1) and using the initial condition, we get,
where \(F\left(x,y\left(x\right),y\left(\alpha \right),{y}^{\mathrm{^{\prime}}}\left(\alpha \right)\right)=f\left(x,y\left(x\right)\right)+{\int }_{\alpha }^{x}K\left(x,y\left(x\right),y\left(\alpha \right),{y}^{\mathrm{^{\prime}}}\left(\alpha \right)\right)dx.\) The observations are listed below,
-
1.
\({y}_{0}\) is continuous since it is a constant,
-
2.
Kernel \(F\) is continuous for \(0\le x\le b\), since \(f\) and \(K\) are continuous in the same domain,
-
3.
\(F\) satisfies Lipschitz condition,
$$\parallel F\left(x,{y}_{1}\left(x\right),{y}_{1}\left(\alpha \right),y{\mathrm{^{\prime}}}_{1}\left(\alpha \right)\right)-F\left(x,{y}_{2}\left(x\right),{y}_{2}\left(\alpha \right),y{\mathrm{^{\prime}}}_{2}\left(\alpha \right)\right)\parallel =\parallel f\left(x,{y}_{1}\left(x\right)\right)\parallel +{\int }_{\alpha }^{x}K\left(x,{y}_{1}\left(x\right),{y}_{1}\left(\alpha \right),y{\mathrm{^{\prime}}}_{1}\left(\alpha \right)\right)dx-f\left(x,{y}_{2}\left(x\right)\right)-{\int }_{\alpha }^{x}K\left(x,{y}_{2}\left(x\right),{y}_{2}\left(\alpha \right),y{\mathrm{^{\prime}}}_{2}\left(\alpha \right)\right)dx,\le \parallel f\left(x,{y}_{1}\left(x\right)\right)-f\left(x,{y}_{2}\left(x\right)\right)\parallel +\parallel {\int }_{\alpha }^{x}K\left(x,{y}_{1}\left(x\right),{y}_{1}\left(\alpha \right),y{\mathrm{^{\prime}}}_{1}\left(\alpha \right)\right)dx-{\int }_{\alpha }^{x}K\left(x,{y}_{2}\left(x\right),{y}_{2}\left(\alpha \right),y{\mathrm{^{\prime}}}_{2}\left(\alpha \right)\right)dx\parallel ,\le {L}_{1}\parallel {y}_{1}\left(x\right)-{y}_{2}\left(x\right)\parallel +{L}_{2}\parallel {y}_{1}\left(\alpha \right)-{y}_{2}\left(\alpha \right)\parallel .$$
Thus, all conditions of Theorem 2 are satisfied. Hence, the IVP denoted in Eq. (1) has a unique solution.
2.6 Stability Analysis
The numerical stability is investigated in this section, where a linear test equation for NDVIDE is shown below,
For simplicity, assume that \(\tau = mh\left( {m \in I} \right)\) and \(y\left( {x - \tau } \right) = y_{n - r}\), [4]. For 2OBM4 in Eq. (21), the multistep formula is rearranged as follows,
By applying Simpson’s quadrature rule, we have the following,
By implementing the test equation in Eqs. (33) and(35) into Eq. (34), the formula becomes,
Subsequently, substituting \({H}_{1}=\eta h\) and \({H}_{2}=\nu {h}^{2}\) into Eq. (36) produces,
Consequently, the stability polynomial obtained is as follows,
Hence, the area for the 2OBM4’s region of stability is displayed in Fig. 2 below after letting \(\eta =1\).

Numerical stability regions for 2OBM4 at different values of \({\text{m}}=1;2;4\). The region becomes smaller as m increases, the value of \({\text{m}}\) increased as the step size, \(h\), decreased \(\left(\frac{\tau }{h}=m\right)\) where \(\uptau =1\). With Increasing \({\text{m}}\), the stability areas are getting smaller
For the suggested 2OBM4, the stability points are selected within the approximate region. According to [5], when analysing a stability region, the non-positive half plane of the region is usually concerned. From Fig. 2, looking only at the left half plane, it was observed that the values of step size suitable to be applied are lesser than \(\left|-1\right|\). The limit of the stability area in \(H1-H2\) plane is identified by inserting \(x=1,0,-1\) and \({e}^{i\theta }\) in the stability polynomial Eq. (38), where \(0\le \theta \le 2\pi \). When applying 2OBM4, the area of stability indicates a reasonable step size.
2.7 Implementation of method
In order to solve the constant type of NVDIDE by applying 2OBM4, two approximations including two off-points are estimated in one block using the constant step size technique. Additionally, the position of delays needs to be identified first preceding the calculation of both methods. Note that the integral and both functions of delay, which are the delay term itself and its derivative, are taken into consideration. In this research, fourth-order backward (BDF) and forward divided difference formulae (FDF) are derived and applied in solving \({y}^{\mathrm{^{\prime}}}(x-\tau )\). The formulae are shown as follows,
The integration part is solved by applying the Composite Simpson quadrature rule. Each subinterval is evaluated by applying Simpson’s rule, where the values are concatenated to obtain a realistic calculation of the integral over the entire interval which is shown below,
where \({x}_{j}=a+jh\) for \(j=0,1,\dots ,n-1,n,\) with \(h=\frac{b-a}{n}\) in particular, \({x}_{0}=a\) and \({x}_{n}=b\).
As for the delay itself, denoted by \({\tau }_{i}\), \(x-{\tau }_{i}\) applies the given output function. For a constant delay, usually only the delay smaller than the initial point is evaluated. Suppose \(x-{\tau }_{i}\ge a\), an additional derived method is applied to calculate the delay for the first initial points. The use of the off-step formula in the computation of NDVIDE is advantageous as the interpolating Lagrange polynomial is superfluous (Figs. 3, 4, 5 and 6).

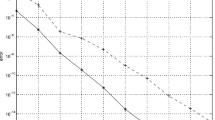
Comparison of FCN and MAXE of 2OBM4, 2PBM4, ABM4 and RK4 for Example 1

Comparison of FCN and MAXE of 2OBM4, 2PBM4, ABM4 and RK4 for Example 2

Comparison of FCN and MAXE of 2OBM4, 2PBM4, ABM4 and RK4 for Example 3

Comparison of FCN and MAXE of 2OBM4, ABM4 and RK4 for Example 4
Prior to implementing 2OBM4, the initial solutions need to be considered first. A single step method is utilised since the multistep block method does not stand alone. For 2OBM4, three initial solutions are approximated. Since the initial value is already given, only two estimated solutions are computed using the one-step method for 2OBM4. Consequently, a Runge–Kutta of order four (RK4) was chosen to assess the preliminary solutions for the proposed method. The formula of RK4 is provided below,
Using the constant step size technique, all algorithms for constant delay problem-solving methods have been developed in the C program. The numerical results obtained have proven the applicability and efficiency of the proposed methods.
2.8 Algorithm of Method
The algorithm for 2OBM4 is illustrated in this subsection. The algorithms are detailed in handling an integral part, the delay term, and its derivative. The following notations are used in the algorithm:
\(a\) | Initial value |
\(b\) | End value |
\(h\) | step size |
\(N\) | Number of iterations |
\(y_{0}\) | Initial solution |
\(y^{\prime}\left( {x - \tau } \right)\) | Delay derivative |
Algorithm of 2OBM4
Step 1: | All values given in equation,\(x_{0} = a,x_{n} = b,h,N,y_{0} ,y^{\prime}\left( {x - \tau } \right) \le a\) |
are set | |
Step 2: | The Volterra integro-differential equation of neutral delay is |
defined: | |
\(y^{\prime}\left( x \right) = f\left( {x_{n} ,y_{n} + \mathop \int \limits_{n - r}^{n} K\left( {x_{n} ,y_{n} ,y_{n - r} ,y{^{\prime}}_{n - r} } \right)dx} \right)\) | |
Step 3: | The original function given is used if \(x - \tau \le a\) |
Step 4: | The delay terms are solved by applying any associated prior |
solution if \(x - \tau \ge a\) | |
Step 5: | BDF or FDF are tested to find \(y^{\prime}\left( {x - \tau } \right)\) |
Step 6: | Composite Simpson is applied to approximate the integral part |
Step 7: | For \(n = 0,1\), |
The initial solution is computed by applying RK4 denoted in | |
Equation (41) | |
Step 8: | For n = 2,4,6,… |
Approximate NDVIDE using the proposed method, 2OBM4, | |
denoted in Eq. (21): | |
Step 9: | Average and maximum error, total steps and function calls are |
calculated computationally | |
Step 10: | Stop |
3 Numerical Results
In this section, first-order NDVIDE problems with constant delay are considered. Four tested problems are solved numerically using 2OBM4. Sufficient conditions for the efficient solution of the nonlinear equations arising on each step size have also been identified. Using effective methods, the proposed technique can also be used to solve other specific classes of Volterra integro-differential equations, such as those where the kernel is independent of \(y^{\prime}\left( t \right).\) Example 1 is from [23], Example 2 is from [12], Example 3 is from [10] and Example 4 is from [25]. All tested problems were solved with different values of constant step size. The numerical results for Examples 1—4 are provided in the tables below. Note that all tested problems were solved numerically by generating two approximations in a single step, one of which incorporates the off-point. The C programming language was used to compute the results. The methods are compared in terms of accuracy, function evaluations and total number of steps taken. The proposed method, 2OBM4 is compared with the two-point fully implicit block method (2PBM), Adam–Bashforth–Moulton (ABM) and Runge–Kutta (RK) methods of order four. The notations used in the tables are as follows,
h | Step size |
MTD | Method |
FCN | Total function calls |
TS | Total steps |
AVERE | Average error |
MAXE | Maximum error |
TIME(s) | Time taken in seconds |
2OBM4 | Two-point two off-step point block multistep method |
(Order 4) | |
2PBM4 | Two-point fully implicit block method (Order 4) |
ABM4 | Adam–Bashforth–Moulton method (Order 4) |
RK4 | Runge–Kutta method (Order 4) |
CRK6 | Continuous Runge–Kutta method (Order 6) |
EOC | Order of convergence |
5e-10 | \(5 \times 10^{ - 10}\) |
-
1.
Zaidan (2012), [12]
$$ y^{\prime}\left( {{\text{x}} - 1} \right) = 1 - \frac{{x^{3} }}{6} + \mathop \int \limits_{0}^{x} \left( {x - t} \right)y\left( t \right)dt,y\left( x \right) = x,\;\;x \in \left[ { - 1,0} \right] $$Exact solution:
$$ y\left( x \right) = x,\;\;x \in \left[ {0,1} \right] $$ -
2.
Wen and Zhou (2017), [13]
$$ y^{\prime } \left( x \right) = - 100y\left( x \right) + \frac{{y^{2} \left( {x - 1} \right)}}{{1 + y^{2} \left( {x - 1} \right)}} + \frac{1}{{10}}y^{\prime } \left( {x - 1} \right) + \frac{1}{{10}}\int\limits_{{x - 1}}^{x} {y\left( u \right)du + \frac{{991}}{{10}}e^{{ - x}} - \frac{{e^{{ - 2x + 2}} }}{{1 + e^{{ - 2x + 2}} }}} , \phi \left( x \right) = e^{ - x} ,\quad x \le 0 $$Exact solution:
$$ y\left( x \right) = e^{ - x} ,\;x \in \left[ {0,1} \right] $$ -
3.
Horvat (1999), [23]
$$ y^{\prime}\left( x \right) = 2e^{1 - x} - 3\mathop \int \limits_{x - 1}^{x} y\left( t \right)dt - \mathop \int \limits_{x - 1}^{x} y^{\prime}\left( t \right)dt,\;\phi \left( x \right) = e^{ - x} ,\;x \le 0 $$Exact solution:
$$ y\left( x \right) = e^{ - x} ,\;\;x \in \left[ {0,1} \right] $$ -
4.
Enright and Hu (1997), [25]
$$ y^{\prime}\left( x \right) = \sin \left( {x - \frac{1}{2}} \right)\mathop \int \limits_{{x - \frac{1}{2}}}^{x} \left\{ {\cos \left( t \right)\left[ {y^{^{\prime}\left( t \right)} } \right]^{2} + \left[ {y\left( t \right)} \right]^{2} } \right\}dt,\phi \left( x \right) = - \cos x,\;x \le 0 $$
4 Discussion
From the numerical result obtained in Example 1, the average error for 2OBM4 at \(h = 0.1\) is more accurate compared to 2PBM4, ABM4 and RK4. Additionally, the function evaluations for 2OBM4 are lesser than 2PBM4, ABM4 and RK4 since the proposed method computed all solutions in a single step. The proposed 2OBM4 is superior to ABM4 and RK4 in terms of total steps taken. Since the main reason for the discussion is also to highlight the advantages of an implicit hybrid block method, all parameters in comparing block and non-block methods must be considered. In Example 2, the average error for 2OBM4 was discovered to be more accurate than 2PBM4, ABM4 and RK4 at step sizes \(0.01,0.001\), and \(0.0001\). Other than that, 2OBM4 outperformed 2PBM4, ABM4 and RK4 in terms of function calls evaluated. The total steps required for 2OBM4 is lesser than the other method (ABM4 and RK4) since it is evaluated in the block. Moreover, the maximum error obtained by 2OBM4 is also comparable. In Example 3, the approximate solutions for 2OBM4 are comparable with 2PBM4, ABM4 and RK4 as the step size is getting smaller. The function calls for 2OBM4 are lesser than 2PBM4 taken from [24] even though 2PBM4 is also a block method.
Finally, in Example 4, the method is comparable to the other method (ABM4 and RK4) except for the average error at \(h = 0.1\) and \(0.001\) where 2OBM4 is more accurate than the other methods at both steps sizes. Even though the proposed method appears comparable, the function call and total steps obtained are lesser than the others. Concentrating on CRK6 [25], 2OBM4 has obtained more accurate results in bigger step sizes compared to CRK6 at smaller \(h = 0.0001\). Hence, 2OBM4 is shown to be more applicable and accurate in solving the problems. In conclusion, compared to 2PBM4, ABM4 and RK4, the proposed 2OBM4 provides accurate results on several parameters such as the accuracy, the total number of steps required, and the evaluated function call. Moreover, an implicit hybrid method computed the numerical solutions by estimating some points simultaneously, including the off-point in the predictors. It achieved better accuracy compared to the other methods. Therefore, the proposed methods are suitable for solving NDVIDE with constant type.
According to [15], the EOC for each example is calculated by implementing the general formula of EOC denoted as shown below,
Referring to Tables 1, 2, 3 and 4, it’s shown that the EOC obtained for the proposed method did not achieve the value four as the order of the proposed method. Since the delay term is a component of the NDVIDE solutions, some constraints have an impact on the numerical results obtained. At the beginning of the interval, there are not enough available points, hence the method of lower order has to be used to calculate the delay term. Thus, the proposed higher-order method used will therefore results in some limitations.
As can be observed in the Tables 1, 2, 3 and 4, the accuracy of the proposed method (2OBM4) is comparable or better than the comparison methods. The MAXE obtained during the calculation is comparable to the existing methods. All the comparison methods have the same order as the proposed method; hence the comparison is fair. We also need to look at the AVERE to conclude the accuracy of the 2OBM4. It can be observed that the AVERE of the 2OBM4 is smaller or more accurate than the other existing methods for every problem. The AVERE is the summation of all the errors at each step and divide by the total steps. The average error is suitable to reflect the accuracy for each method. Hence, we could observe that the average error in the 2OBM4 is smaller than the comparison methods and this reflect the accuracy of the hybrid method.
5 Conclusion
In this study, NDVIDE was numerically treated with a constant delay. The 2OBM4 method solved NDVIDE issues by generating two approximate solutions in a single step utilising the same previous data, including the off-point. The existence-uniqueness theorem is derived for the solution of NDVIDE and convergence analysis of the proposed method is presented. Several examples are used to demonstrate the effectiveness of the suggested strategy, and it is noted that they are in excellent agreement with the exact solutions. In addition, the numerical findings also demonstrate that 2OBM4 is suitable for solving NDVIDE problems with constant delay. Since NDVIDE has never previously been addressed using a hybrid block technique, the methods could be expanded into three or four-point block methods. Moreover, it would be interesting to compute the derivative section of NDVIDE using a higher-order divided difference formula, such as a seventh- or tenth-order centred difference formula, since the neutral type of DVIDE is considered. Other than that, Lagrange or Hermite interpolating polynomials may also be utilised to approximate the derivative of the delay terms.
Data Availability
All data generated or analysed during this study are included in this published article.
Code availability
Not applicable.
References
Jhinga, A., Patade, J., Daftardar-Gejji, V.: Solving Volterra integro-differential equations involving delay: a new higher order numerical method. Math. Sci. 2009, 11571 (2020)
Gurbuz, B.: A numerical scheme for the solution of neutral integro-differential equations including variable delay. Math. Sci. 16, 13–21 (2022)
Baker, C.T., Bocharov, G., Rihan, F.A.R.: Neutral delay differential equations in the modelling of cell growth. J. Egypt. Math. Soc. 16(2), 133–160 (2008)
Rihan, F.A., Doha, E.H., Hassan, M.I., Kamel, N.: Numerical treatments for Volterra delay integro-differential equations. Computat. Methods Appl. Math. 9(3), 292–318 (2009)
Ismail, F., Suleiman, M.: Stability aspects of explicit Runge-Kutta method for delay differential equations. Jurnal Teknologi 44(1), 1–12 (2006)
Ishak, F., Suleiman, M., Majid, Z.A.: Numerical solution and stability of block method for solving functional differential equations. In: Yang, G.C., Ao, S.I., Gelman, L. (eds.) Transactions on Engineering Technologies, pp. 597–609. Springer, Dordrecht (2014)
Brunner, H.: High-order collocation methods for singular Volterra functional equations of neutral type. Appl. Numer. Math. 57(5–7), 533–548 (2007)
Lambert, J.D.: Computational Methods in Ordinary Differential Equations, Wiley, New York, NY, 1973.
J. D. Lambert, Numerical Methods for Ordinary Differential Systems, Wiley: New York, NY, (1991)
Zhou, J., Fan, Y., Xu, Y.: An analysis of delay-dependent stability of symmetric boundary value methods for the linear neutral delay integro-differential equations with four parameters. Appl. Math. Model. 39(9), 2453–2469 (2015)
Mohammedal, K.H., Ahmad, N.A., Fadhel, F.S.: Existence and uniqueness of the solution of delay differential equations. In AIP Conf. Proc. 1775(1), 030015 (2016)
Zaidan, L.I.: Solving linear delay Volterra integro-differential equations by using Galerkin’s method with Bernstein polynomial. J. Bablyon Appl. Sci 20(5), 1305–1313 (2012)
Wen, L., Zhou, Y.: Convergence of one-leg methods for neutral delay integro-differential equations. J. Comput. Appl. Math. 317(2), 432–446 (2017)
Baharum, N.A., Majid, Z.A., Senu, N.: Solving Volterra integro-differential equations via diagonally implicit multistep block method. Int. J. Math. Math. Sci. 3, 1–10 (2018)
Zabidi, N.A., Majid, Z.A., Kilicman, A., Ibrahim, Z.B.: Numerical solution of fractional differential equations with Caputo derivative by using numerical fractional predict-correct technique. Adv. Contin. Discr. Models 2022(1), 26 (2022)
Ismail, N.I.N., Majid, Z.A., Senu, N.: Hybrid multistep block method for solving neutral delay differential equations. Sains Malays. 49(4), 929–940 (2020)
Ismail, N.I.N., Majid, Z.A., Senu, N.: Solving neutral delay differential equation of pantograph type. Malays. J. Math. Sci. 15014, 107–121 (2020)
Ismail, N.I.N., Majid, Z.A., Senu, N., Wahi, N.: Numerical method in solving neutral and retarded Volterra delay integro-differential equations. J. Phys. Conf. Ser. 1998(1), 012033 (2021)
Ismail, N.I.N., Majid, Z.A., Senu, N.: Numerical solution for neutral delay differential equation of constant or proportional type using hybrid block method. Adv. Appl. Math. Mech. 14(5), 1138–1160 (2022)
Jator, S.N.: On the hybrid method with three off-step points for initial value problems. Int. J. Math. Educ. Sci. Technol. 41(1), 110–118 (2010)
Sedaghat, S., Ordokhani, Y., Dehghan, M.: On spectral method for Volterra functional integro-differential equations of neutral type. Numer. Funct. Anal. Optimisat. 35(2), 223–239 (2014)
Reutskiy, S.Y.: The backward substitution method for multipoint problems with linear Volterra-Fredholm integro-differential equations of the neutral type. J. Comput. Appl. Math. 296, 724–738 (2016)
Horvat, V.: On polynomial spline collocation methods for neutral Volterra integro-differential equations with delay arguments. Proc. Conf. Appl. Math. Computat. 13, 113–128 (1999)
Hoo, Y.S., Majid, Z.A.: Solving delay differential equations of pantograph type using predictor-corrector method, in. In AIP Conf. Proc.edings 1660(050059), 1–4 (2015)
Enright, W.H., Hu, M.: Continuous Runge-Kutta methods for neutral Volterra integro-differential equations with delay. Appl. Numer. Math. 24(2–3), 175–190 (1997)
Ming, W., Huang, C.: Collocation methods for Volterra functional integral equations with non-vanishing delays. Appl. Math. Comput. 296, 198–214 (2017)
Jackiewicz, Z.: The numerical solution of Volterra functional differential equations of neutral type. SIAM J. Numer. Anal. 18(4), 615–626 (1981)
Acknowledgements
All authors gratefully acknowledge the financial support of the Fundamental Research Grant Scheme (Project Code: FRGS/1/2020/STG06/UPM/01/1) from the Ministry of Higher Education Malaysia. The authors are also thankful to the referees for their useful comments and suggestions.
Funding
This research was funded by the financial support of the Fundamental Research Grant Scheme (project code: FRGS/1/2020/STG06/UPM/01/1) from the Ministry of Higher Education Malaysia.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
None of the authors have competing interests.
Ethics Approval
Not applicable.
Consent to Participate
Not applicable.
Consent for Publication
Not applicable.
Additional information
Communicated by Nur Nadiah Abd Hamid.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ismail, N.I.N., Abdul Majid, Z. Numerical Solution on Neutral Delay Volterra Integro-Differential Equation. Bull. Malays. Math. Sci. Soc. 47, 85 (2024). https://doi.org/10.1007/s40840-024-01683-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40840-024-01683-7
Keywords
- Constant delay
- Constant step size
- Hybrid block multistep method
- Neutral delay Volterra integro-differential equations