
Abstract
We mainly study the solvability of tensor absolute value equation (TAVE) in the form \({\mathscr {A}}x^{m-1}-{\mathscr {B}}\vert x\vert ^{m-1}=b\). Under certain conditions, some new sufficient conditions are provided which ensure that the mentioned problem has at least one solution. Furthermore, it reveals that the equation is unsolvable in some special cases. Brief discussions are also included on examining the performance of a fixed point iterative scheme for solving TAVEs. The numerical experiments illustrate that the proposed iterative method is feasible.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and Preliminaries
We consider the tensor absolute value equation (TAVE) in the following form:
where \({\mathscr {A}},{\mathscr {B}}\in {\mathbb {R}}^{[m,n]}\)Footnote 1 together with the right-hand side \(b\in {\mathbb {R}}^n\) are given and the vector \(x\in {\mathbb {R}}^n\) is the unknown vector to be determined. Here, the n- dimensional vector \(\vert x\vert \) corresponds to elementwise absolute value of the vector x.
Let \({\mathscr {A}}=(a_{i_1i_2\ldots i_m})\in {\mathbb {R}}^{[m,n]}\), with \(1 \le i_\tau \le n\) for \(\tau =1,2,\ldots ,m\). Given \(x\in {\mathbb {R}}^{n}\), the i-th component of vector \({\mathscr {A}}x^{m-1}\in {\mathbb {R}}^n\) is defined as follows:
In what follows, th notation \({\mathscr {I}}_m\) represents identity tensor, i.e., \({\mathscr {I}}_m=(\delta _{i_1\ldots { i_m}})\) such that
As seen, by setting \({\mathscr {B}}={\mathscr {I}}_m\), Eq. (1) can be regarded as a generalized form of the following TAVE,
where \(\vert x\vert ^{[m-1]} \in {\mathbb {R}}^{n}\) with \(|x|^{[m-1]}=(|x_1|^{m-1};|x_2|^{m-1};\ldots ;|x_n|^{m-1})\)Footnote 2. It was shown that Eq. (2) is equivalent to a generalized tensor complementarity problem and the bi-multilinear program which may appear in n-person noncooperative games and nonlinear compressed sensing, for more details see [4, 6, 14]. We refer the reader to [12] for a comprehensive review of the cases that Eq. (1) may arise from the real-world problems.
Compared with the standard absolute value equation (AVE) of the form \(Ax-\vert x\vert =b\), TAVE in the form (1) includes two multidimensional nonlinear terms. This makes the extensions of existing results and proposed iterative methods for the AVEs not easily applicable to TAVEs. So far, the existence of solutions for TAVEs has been investigated in several works (see [1, 4, 7, 12]). More recently, Jiang and Li mainly discuss the solvability of (1) under some restrictions on the structure of both tensors \({\mathscr {A}}\) and \({\mathscr {B}}\) (see [7, Theorem 3.3] for more details.) In this paper, our aim is to study the (un)solvability of (1) under different conditions and possibly more relaxed assumptions. To be more precise, we are interested in developing some sufficient conditions for the solvability of TAVEs by analyzing the possible extensions of some existing results for standard AVEs established by Mangasarian and Meyer [15].
Before ending this part, a brief overview is given on some notations, basic definitions, and properties being used for deriving our main results, one can refer to [2, 13, 16] and the references therein for further details. In Sect. 2, we prove some results on the (un)solvability of TAVEs under certain conditions. Section 3 is devoted to presenting a fixed point method for solving the mentioned TAVE. Moreover, some numerical results are reported to experimentally demonstrate the superiority of the proposed method over the recently presented method in [7]. Finally, we finish the paper with some concluding remarks.
Given two tensors \({\mathscr {A}},{\mathscr {B}}\in {\mathbb {R}}^{[m,n]}\), the notation \({\mathscr {A}} \le {\mathscr {B}}\) means that \(a_{i_1i_2\ldots i_m} \le b_{i_1i_2\ldots i_m}\) for \(1\le i_\tau \le n\) and \(1\le \tau \le m\). The notation \({\mathscr {A}} \ge 0\) refers to the case that all entries of \({\mathscr {A}}\) are nonnegative.
Let \({\mathscr {A}}\in {\mathbb {R}}^{[m,n]}\). A pair \((\lambda ,x)\in {\mathbb {C}}\times ({\mathbb {C}}^n \backslash \{0\})\) is called an eigenpair of \({\mathscr {A}}\), if they satisfy the equation \({\mathscr {A}}x^{m-1}=\lambda x^{[m-1]}\) where \(x^{[m-1]}=(x_1^{m-1}; \ldots ;x_n^{m-1})\). The eigenpair \((\lambda ,x)\) is called an H-eigenpair, if both scalar \(\lambda \) and vector x are real. The spectral radius of \({\mathscr {A}}\) is given by \(\rho ({\mathscr {A}})=\max \{\vert \lambda \vert ~\vert ~ \lambda \in \sigma ({\mathscr {A}})\}\) where \(\sigma ({\mathscr {A}})\) is the set of all eigenvalues of \({\mathscr {A}}\). Throughout this paper, we work with the function \({\Vert .\Vert }_{\infty }\) over \({\mathbb {R}}^{[m,n]}\) which is defined by
for any \({\mathscr {A}}=(a_{i_1i_2\ldots i_m})\in {\mathbb {R}}^{[m,n]}\). The notion is a natural extension of the norm infinity over matrices (see [12, 13]). It is immediate to see that \({\Vert {\mathscr {A}} x^{m-1}\Vert }_{\infty } \le {\Vert {\mathscr {A}}\Vert }_{\infty } {\Vert x\Vert }_{\infty }^{m-1}\) where \({\Vert x\Vert }_\infty \) denotes the infinity norm of the vector x.
In the sequel, we work with two matrix-tensor products. The first product can be regarded as a special case of the product between two tensors defined in [17, Definition 1.1]. The second product is basically the well-known 1-mode product (see [10, subsection 2.5]).
Definition 1
If \({\mathscr {A}}=(a_{i_1i_2\ldots i_m})\in {\mathbb {R}}^{{[m,n]}}\) and \({B}\in {\mathbb {R}}^{[2,n]}\), then the tensors \({\mathscr {C}}={\mathscr {A}}B\) and \(\tilde{{\mathscr {C}}}=B{\mathscr {A}}\) belong to \( {\mathbb {R}}^{{ [m,n]}}\) and their entries are, respectively, given as follows:
for \(1\le j,i_\tau \le n\) and \(\tau =2,\ldots ,m\).
The tensor \({\mathscr {A}}=(a_{i_1i_2\ldots i_m})\in {\mathbb {R}}^{[m,n]}\) is called a \({\mathcal {Z}}\)-tensor, if its off-diagonal entries are nonpositive. If there exist a nonnegative tensor \(\tilde{{\mathscr {B}}}\) and a positive real number \(\eta \ge \rho (\tilde{{\mathscr {B}}})\) such that \( {\mathscr {A}}=\eta {\mathscr {I}}_m-\tilde{{\mathscr {B}}}, \) then \({\mathscr {A}}\) is said to be an \({\mathcal {M}}\)-tensor. In the case that \(\eta > \rho (\tilde{{\mathscr {B}}}),\) the tensor \({\mathscr {A}}\) is called a strong (or nonsingular) \({\mathcal {M}}\)-tensor, see [20] for more details. The majorization matrix \(M({\mathscr {A}})\) associated with \({\mathscr {A}}\) is an \(n\times n\) matrix with the entries \( M({\mathscr {A}})_{ij} =a_{ij\ldots j}\) for \(i,j=1,2,\ldots ,n. \) If \(M({\mathscr {A}})\) is a nonsingular matrix and \({\mathscr {A}}=M({\mathscr {A}}) {\mathscr {I}}_m\), the matrix \(M({\mathscr {A}})^{-1}\) is called the order 2 left-inverse of \({\mathscr {A}}\). If \({\mathscr {A}}\in {\mathbb {R}}^{[m,n]}\) has an order 2 left-inverse, \({\mathscr {A}}\) is called a left-invertible (or left-nonsingular) tensor. The decomposition \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) is called a (tensor) splitting, if \({\mathscr {E}}\) is left nonsingular. The tensor \({\mathscr {A}}\) is said to be row diagonal if \(a_{ii_2\ldots i_m}\) can take nonzero value only when \(i_2=\ldots =i_m.\) It is known that \({\mathscr {A}}\) is row diagonal iff \({\mathscr {A}}=M({\mathscr {A}}){\mathscr {I}_m}\); for more details, see [18].
We end this section by recalling the definition of special splittings for tensors.
Definition 2
[13] Let \({\mathscr {A}}\in {\mathbb {R}}^{[m,n]}\). The splitting \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) is said to be
-
a regular splitting, if \(M({\mathscr {E}})^{-1} \ge 0\) and \({\mathscr {F}} \ge 0\);
-
a weak regular splitting, if \(M({\mathscr {E}})^{-1} \ge 0\) and \(M({\mathscr {E}})^{-1}{\mathscr {F}} \ge 0\);
-
a convergent splitting, if \(\rho (M({\mathscr {E}})^{-1}{\mathscr {F}})<1\).
2 Existence (Nonexistence) of Solutions for TAVEs
In this part, we discuss on the (un)solvability of TAVEs in the form (1). To do so, given a vector \(x=(x_1;x_2;\ldots ;x_n)\), we consider the diagonal matrix \(D=\text {diag}\{d_{11},d_{22},\ldots ,d_{nn}\}\) such that \(\vert x_i\vert =d_{ii} x_i\) for \(i=1,2,\ldots ,n\). Evidently, Eq. (1) can be rewritten as follows:
Therefore, Eq. (1) has a (unique) solution, if the above multilinear equation is (uniquely) solvable.
The following two theorems were proved for unique solvability of TAVE (1) (see [7, Theorems 3.4 and 3.5]). As seen, in the first theorem, the tensors \({\mathscr {A}}\) and \( {\mathscr {B}}\) have even orders such that \({\mathscr {A}}\) is left nonsingular and \({\mathscr {B}}\) is row diagonal. The second theorem is a direct conclusion of the results proved in [3, Theorem 3.2]. We further comment that Theorem 2 incorporates the result being established in [1, Theorem 3.1] for unique solvability of (2).
Theorem 1
Let \({\mathscr {A}}, {\mathscr {B}} \in {\mathbb {R}}^{[m,n]}\) and \(\Delta \ge 0\) such that each element in \({\mathscr {A}}_I=[{\mathscr {A}}-\Delta ,{\mathscr {A}}+\Delta ]\) is left nonsingular, and \(\vert {\mathscr {B}} \vert \le \Delta \). If m is even, then TAVE (1) has a unique solution for any \(b\in {\mathbb {R}}^n\).
Theorem 2
Let \({\mathscr {A}}, {\mathscr {B}} \in {\mathbb {R}}^{[m,n]}\). If \({\mathscr {A}}- {\mathscr {B}}\) is a strong \({\mathcal {M}}\)-tensor, then for every positive vector b, TAVE (1) has a unique positive solution.
Here, we present several types of sufficient conditions that guarantee the existence of a solution for TAVE (1). First, we consider the case that the right-hand side b in (1) is an arbitrary real-valued vector. Then, we focus on cases where the entries of b have a certain sign. To this end, the following theorem is recalled for the solvability of the multilinear systems of the form \(\hat{{\mathscr {A}}}x^{m-1}=b\) (see [13, Theorem 4.8] for further details.)
Theorem 3
Let \(\hat{{\mathscr {A}}}\in {\mathbb {R}}^{[m,n]}\) have a splitting \(\hat{{\mathscr {A}}}={\mathscr {E}} -{\mathscr {F}} \) satisfying \({\Vert M({\mathscr {E}})^{-1}{\mathscr {F}}\Vert }_\infty < 1\). Then for any \(b\in {\mathbb {R}}^n\), the multilinear system \(\hat{{\mathscr {A}}}x^{m-1}=b\) has at least a solution.
In view of Eq. (3) and the preceding theorem, the succeeding proposition can be proved which provides a sufficient condition for the solvability of TAVE (1). The proposition incorporates an established result in [12, Theorem 3.10].
Proposition 4
If there exists a splitting \({\mathscr {A}}={\mathscr {E}} -{\mathscr {F}} \) satisfying \({\Vert M({\mathscr {E}})^{-1}{\mathscr {F}}\Vert }_\infty +{\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_\infty < 1\), then TAVE (1) has at least one solution for any \(b\in {\mathbb {R}}^n\).
Proof
For simplicity, we set \({\mathscr {A}}_1={\mathscr {A}}-{\mathscr {B}}D\). Corresponding to the given splitting \({\mathscr {A}}={\mathscr {E}} -{\mathscr {F}} \), we consider the splitting \({\mathscr {A}}_1={\mathscr {E}}_1 -{\mathscr {F}}_1 \) with \({\mathscr {E}}_1 ={\mathscr {E}}=M({\mathscr {E}}){\mathscr {I}}\) and \({\mathscr {F}}_1 ={\mathscr {F}}+{\mathscr {B}}D\). Notice that \({\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}D\Vert }_\infty ={\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_\infty \), we obtain
Hence the conclusion follows from Theorem 3. \(\square \)
In the sequel, we establish other types of sufficient conditions which guarantee that Eq. (3) is solvable.
To establish these results, our goal is to set certain hypotheses on the entries of the right-hand side vector b and consider the case that conditions \({\mathscr {A}}=M({\mathscr {A}}){\mathscr {I}_m}\) and \({\mathscr {B}}=M({\mathscr {B}}){\mathscr {I}_m}\) are not hold simultaneously. In particular, we are interested in investigating the possible extensions of the results for the standard AVEs in the form \(Ax-\vert x\vert =b\) in which \(\vert x\vert \) is dominant. To the best of our knowledge, this case has not been discussed in the context of the tensor absolute value problem.
First, we assume that tensor \({\mathscr {B}}\) is left nonsingular and the vector \(M({\mathscr {B}})^{-1} b \) has no positive component. In this case, Theorem 5, Propositions 6 and 8 are presented on the solvability of (1).
It is known that an AVE in the form \(Ax-\vert x\vert =b\) has \(2^n\) distinct solutions under certain assumptions on the matrix A and right-hand side vector b (see [15, Proposition 6] for more details). The following theorem shows that the result can be developed for TAVEs under suitable conditions. We comment that the employed techniques in our proof are inspired by strategies used in [13, Theorem 4.8] and [15, Proposition 6].
Theorem 5
Assume that \({\mathscr {A}}\) and \({\mathscr {B}}\) belong to \({\mathbb {R}}^{[m,n]}\) such that m is even. Moreover, the tensor \({\mathscr {B}}\) is left nonsingular and b is a nonzero vector such that \(y:=M({\mathscr {B}})^{-1} b < 0 \). If \({\Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } < \gamma /2\) where \(\gamma = \min _i \vert y_i\vert /{\Vert y\Vert }_\infty \), then the TAVE (1) has \(2^n\) distinct solutions, each of which has no zero components and a different sign pattern.
Proof
For notational simplicity, we set \({\mathscr {F}}:=M({\mathscr {B}})^{-1} {\mathscr {A}}\). Consider the following set of vectors on \( {\mathbb {R}}^n\),
and the fixed point problem \(x={\mathcal {G}}(x)\) with \( {\mathcal {G}}(x):= \left( {\mathscr {F}}x^{m-1}-y\right) ^{[\frac{1}{m-1}]}. \) Since \({\mathbb {S}}\) is a compact convex set and \({\mathcal {G}}(x)\) is continuous, by the well-known Brouwer’s fixed point theorem, we aim to show that there exists a positive vector \(x\in {\mathbb {S}}\) such that \(x={\mathcal {G}}(x)\). To this end, given \(x\in {\mathbb {S}}\), we first need to verify that \({\mathcal {G}}(x)\in {\mathbb {S}}\), i.e., \({\mathcal {G}}(\cdot )\) maps \({\mathbb {S}}\) to itself. By some algebraic computations, we can deduce that
This guarantees the existence of the fixed point \({\bar{x}}\) for \(x={\mathcal {G}}(x)\). Now, we show that \({\bar{x}}\) is a positive vector. By some straightforward computations, we obtain
Consequently, by the definition of \(\gamma \), we have \( {\Vert {\bar{x}}^{[m-1]} + y \Vert }_\infty < \min _i \vert y_i\vert = \min _i -y_i. \) From the above relation, we can deduce that
which results \( 0 \le \max _i y_i- y_i < {\bar{x}}^{[m-1]}_i \) for \(i=1,2,\ldots ,n\). Since m is even, we conclude that \({\bar{x}} >0\). Therefore, \({\bar{x}}=\vert {\bar{x}}\vert \) is the solution of (1).
The above discussion shows there exists a positive solution for \({\mathscr {A}}x^{m-1}-{\mathscr {B}}x^{m-1}=b\) under certain conditions. Let D be a diagonal matrix such that \(D^2=I\). As a result, to demonstrate the existence of solutions with other sign patterns, we need to show that
has a positive solution. Notice that \({\Vert {\mathscr {F}}D\Vert }_\infty ={\Vert {\mathscr {F}}\Vert }_\infty < \gamma /2\), and using the above process, we can deduce that Eq. (4) has a positive solution \({\bar{y}}\). Hence, the vector \(x=D{\bar{y}}\) is the solution of \({\mathscr {A}}x^{m-1}-{\mathscr {B}}\vert x\vert ^{m-1}=b\) with sign pattern D (i.e., \(Dx\ge 0\)) which completes the proof. \(\square \)
We can further provide sufficient conditions for the existence of a nonnegative solution for (1) and extend a result from standard AVE (see [15, Proposition 5]).
Proposition 6
Suppose that \({\mathscr {A}},{\mathscr {B}} \in {\mathbb {R}}^{[m,n]}\), \({\mathscr {A}}\ge 0\) and \({\mathscr {B}}\) is left-nonsingular strong \({\mathcal {M}}\)-tensor. If \({\Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } <1\) and \( b \le 0 \), then TAVE has a nonnegative solution.
Proof
For simplicity, we set \(y:=M({\mathscr {B}})^{-1}b\), \({\mathscr {F}}:=M({\mathscr {B}})^{-1} {\mathscr {A}}\) and \( \hat{{\mathcal {G}}}(x):= {\mathscr {F}}x^{m-1}-y \). Note that a left-nonsingular tensor is a strong \({\mathcal {M}}\)-tensor iff its majorization matrix is a nonsingular M-matrix which implies that \(M({\mathscr {B}})^{-1}\ge 0\). This concludes \({\mathscr {F}} \ge 0\) and \(y~ {\le }~ 0\). With a similar strategy exploited for proving the previous theorem, we can show that \(x=(\hat{{\mathcal {G}}}(x))^{[\frac{1}{m-1}]}\) has a fixed point on \(\hat{{\mathbb {S}}}\) where
which completes the proof. \(\square \)
From the proof of Proposition 6, it can be deduced that TAVE has a positive solution when \( b < 0 \). In the following proposition, we show that the positive solution of TAVE is unique. To this end, first, we need to recall the succeeding useful result from [3, Theorem 3.2].
Theorem 7
If \(\hat{{\mathscr {A}}}\) is a strong \({\mathcal {M}}\)-tensor, then for every positive vector b the multilinear system of equations \(\hat{{\mathscr {A}}}x^{m-1} = b\) has a unique positive solution.
Proposition 8
In addition to the hypotheses of Proposition 6, assume that all entries of b are nonzero \((b < 0)\). Then, TAVE (1) has a unique positive solution.
Proof
Since \(b < 0\) and \(M(B)^{-1}\ge 0\), it can be verified that \(M(B)^{-1} b<0\). Following the similar techniques used in the proof of Proposition 6, the existence of positive solution for (1) can be established. To ease the notation, we set \({\mathscr {F}}:=M({\mathscr {B}})^{-1}{\mathscr {A}}\). In the proof of Proposition 6, it revealed that \({\mathscr {F}} \ge 0\). Evidently, every nonnegative (positive) solution of (1) satisfies the following tensor equation
where \(\hat{{\mathscr {A}}}:={\mathscr {I}}-{\mathscr {F}}\).
Let \(\lambda \) be an arbitrary eigenvalue of \({\mathscr {F}}\). Hence there exists a nonzero vector z such that
Suppose that \(\vert z_\tau \vert =\Vert z \Vert _{\infty }\) and consider the \(\tau \)-th component from both sides of the above relation. It is not difficult to see that
which implies that \( \vert \lambda \vert \le {\Vert {\mathscr {F}}\Vert }_{\infty } <1. \) Now the uniqueness of the positive solution for (1) follows from Theorem 7 and the fact that \(\rho ({\mathscr {F}})< 1\). \(\square \)
Now, we assume that the vector b has no negative component and present sufficient conditions for the solvability of (1).
Proposition 9
Suppose that \({\mathscr {A}}\) and \( {\mathscr {B}} \) belong to \({\mathbb {R}}^{[m,n]}\) such that \({\mathscr {B}}\ge 0\). If there exists a weak regular splitting \({\mathscr {A}}={\mathscr {E}}_1-{\mathscr {F}}_1\) such that \({\Vert M({\mathscr {E}}_1)^{-1}({\mathscr {F}}_1+{\mathscr {B}})\Vert }_{\infty } <1\) and \( b > {(\ge )} ~0 \), then TAVE has a positive (nonnegative) solution.
Proof
The proof follows a similar strategy used for proving Proposition 6. Basically, using the facts that \(M({\mathscr {E}}_1)^{-1} \ge 0\) and \(M({\mathscr {E}}_1)^{-1}({\mathscr {F}}_1+{\mathscr {B}}) \ge 0\), we can conclude the assertion by considering the fixed point problem
over
where \(y:=M({\mathscr {B}})^{-1}b > {(\ge )} ~0\). \(\square \)
In the rest of this section, three propositions are presented to generalize the established results in [15, Propositions 9 and 10] for unsolvability of standard AVEs into multidimensional case. We comment that the first type of these results was recently extended for Sylvester-like absolute value matrix equation [5, Theorem 2].
Proposition 10
Assume that \({\mathscr {A}}\) and \({\mathscr {B}}\) belong to \({\mathbb {R}}^{[m,n]}\) such that \({\mathscr {B}}\) is left nonsingular, b is a nonzero vector and \(M({\mathscr {B}})^{-1} b \ge 0 \). If \({\Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } < 1\), then the TAVE (1) has no solution.
Proof
By the assumption, we have \({\mathscr {B}}=M({\mathscr {B}}){\mathscr {I}_m}\). Hence, Eq. (1) can be written into the following form:
By contraction, we assume that \({\bar{x}}\) is a solution of (1). It can be verified that \({\bar{x}}\) is a nonzero vector. Since \(M({\mathscr {B}})^{-1} b \ge 0 \), we conclude that
Notice that \({\Vert \vert {\bar{x}}\vert ^{[m-1]} \Vert }_{\infty }={\Vert {\bar{x}}\Vert }_{\infty }^{m-1}\). Now, taking the infinity norm from both sides of the above inequality, we get \({\Vert \vert {\bar{x}}\vert ^{[m-1]} \Vert }_{\infty } \le { \Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } {\Vert {\bar{x}}\Vert }_{\infty }^{m-1} < {\Vert {\bar{x}}\Vert }_{\infty }^{m-1}\) which is a contraction. \(\square \)
For more clarification, following simple example is given to illustrate the fact presented by Proposition 10.
Example 1
Let \({\mathscr {B}}={\mathscr {I}_m}\), \({\mathscr {A}} \in {\mathbb {R}}^{[m,2]}\) such that \(a_{2i_2\ldots i_m}= 0\),
and \(b=(b_1;0)\) with \(b_1 > 0\). Associated with TAVE (1), we have
From Eq. (6), we deduce \(x_2=0\). Consequently, Eq. (5) reduces to
Notice that for \(b_1 > 0\), the corresponding TAVE has no solution since the left-hand side is negative.
With a similar strategy used for proving Proposition 10, we can prove the following proposition.
Proposition 11
Let \(m\ge 2\) be an odd number. Suppose that \({\mathscr {A}}\) and \({\mathscr {B}}\) belong to \({\mathbb {R}}^{[m,n]}\) such that \({\mathscr {A}}\) is left nonsingular, b is a nonzero vector and \(M({\mathscr {A}})^{-1} b \le 0 \). If \({\Vert M({\mathscr {A}})^{-1} {\mathscr {B}}\Vert }_{\infty } < 1\), then the TAVE (1) has no solution.
Now we prove the last result on unslovability of TAVE (1). To this end, first, we need to present the following simple lemma.
Lemma 12
Assume that \(\alpha \) and \(\beta \) are two nonnegative constants such that \(0 \le \alpha \le \beta \). If \((2\beta -\alpha ) > 0\), then \( 0 \le \frac{\alpha \beta }{2\beta -\alpha } \le \alpha . \)
Proposition 13
Assume that even order tensors \({\mathscr {A}}\) and \({\mathscr {B}}\) belong to \({\mathbb {R}}^{[m,n]}\) such that \({\mathscr {B}}\) is left nonsingular and b is a nonzero vector. If \(M({\mathscr {B}})^{-1}b\) has at least one positive element and \({\Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } < \tilde{\gamma } /2\) where \(\tilde{\gamma } = \max _{y_i>0} y_i/{\Vert y\Vert }_\infty \) with \(y=M({\mathscr {B}})^{-1} b\), then TAVE (1) has no solution.
Proof
By contraction, we assume that Eq. (1) has a solution. The following TAVE has also a solution,
Now consider the diagonal matrix \({\tilde{D}} =\text {diag}\{{\tilde{d}}_{11},\ldots ,{\tilde{d}}_{nn}\}\) such that \({\tilde{D}}M({\mathscr {B}})^{-1}b=-\vert M({\mathscr {B}})^{-1}b\vert \). The slovability of the preceding TAVE ensures the existence of the solution for the following TAVE,
Evidently, we have \({\Vert {\tilde{D}}M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } ={\Vert M({\mathscr {B}})^{-1} {\mathscr {A}}\Vert }_{\infty } < \tilde{\gamma } /2\). As a result, for any vector \(x=(x_1;x_2;\ldots ;x_n)\) satisfying in Eqs. (8) and (9), it can be verified that
Hence, every solution of Eqs. (8) and (9) belongs to \(\tilde{{\mathbb {S}}}\) where
Let \(\tau \) correspond to the index of the largest positive element of y, i.e., \(y_\tau :=\max _{y_i>0} y_i\). Now let us consider the \(\tau \)-th component from both side of Eq. (9) as follows:
As a result, using Lemma 12, we have
which cannot be true since \({\tilde{d}}_{\tau \tau }<0\). \(\square \)
We end this section by a simple example to confirm the validity of results presented by Theorem 5 and Proposition 13 for solvability and nonsolvability of TAVE (1), respectively.
Example 2
Let \({\mathscr {A}}=(a_{i_1i_2i_3i_4})\in {\mathbb {R}}^{[4,2]}\) be a given tensor having two nonzero entries \(a_{2111}=a_{1222}=\frac{1}{3}\). Assume that \({\mathscr {B}}=(b_{i_1i_2i_3i_4})\in {\mathbb {R}}^{[4,2]}\) with \(b_{1111}=-1\), \(b_{2222}=1\) and all other entries of \({\mathscr {B}}\) are zero. Moreover, assume that the right-hand side \(b=[b_1;b_2]\) in Eq. (1) is a nonzero vector such that \(\vert b_1\vert =\vert b_2\vert \).
Evidently, TAVE (1) reduces to the following system of equations:
Let \(\delta _i=\text {sgn}(x_i)\) for \(i=1,2\) where
The system of equations (10) can be rewritten as follows:
Straightforward computations show that the solutions of above system satisfy
Notice that there are four possible pairs for \((\delta _1,\delta _2)\) since \(\delta _i=\pm 1\). The values of \(x_1\) and \(x_2\) cannot be zero since \(\vert b_1\vert =\vert b_2\vert \) and \(b_i\ne 0\) for \(i=1,2\). Now, we consider the following two cases:
-
Case 1. Let \(b_1=1\) and \(b_2=-1\). It is not difficult to observe that the assumptions of Theorem 5 are hold. Setting \((\delta _1,\delta _2)\) equal to (1, 1), \((-1,1)\), \((1,-1)\) and \((-1,-1)\), using Eq. (11), we obtain the following pairs for \([x_1;x_2]\), respectively,
$$\begin{aligned} \left[ {\root 3 \of {{\frac{3}{5}}};\root 3 \of {{\frac{6}{5}}}} \right] ,\left[ { - \root 3 \of {{\frac{3}{4}}};\root 3 \of {{\frac{3}{4}}}} \right] ,\left[ {\root 3 \of {{\frac{3}{2}}}; - \root 3 \of {{\frac{3}{2}}}} \right] ,~\text {and}~\left[ { - \root 3 \of {{\frac{6}{5}}}; - \root 3 \of {{\frac{3}{5}}}} \right] . \end{aligned}$$All of the above four pairs are the solution of system (10) which confirms the established results in Theorem 5.
-
Case 2. Let \(b_1=b_2=-1\). Evidently, the hypotheses of Proposition 13 are satisfied. By substituting the pairs (1, 1), \((-1,1)\), \((1,-1)\) and \((-1,-1)\) in Eq. (11) for \((\delta _1,\delta _2)\), we, respectively, derive the following four pairs for \([x_1;x_2]\):
$$\begin{aligned} \left[ { - \root 3 \of {{\frac{6}{5}}};\root 3 \of {{\frac{3}{5}}}} \right] ,\left[ {\root 3 \of {{\frac{3}{2}}};\root 3 \of {{\frac{3}{2}}}} \right] ,\left[ { - \root 3 \of {{\frac{3}{4}}}; - \root 3 \of {{\frac{3}{4}}}} \right] ,~\text {and}~\left[ {\root 3 \of {{\frac{3}{5}}}; - \root 3 \of {{\frac{6}{5}}}} \right] . \end{aligned}$$It can be verified that non of the above pairs satisfy system (10) which shows that TAVE (1) in this case has no solution.
3 Fixed Point Schemes to Solve TAVEs
Recently, Jiang and Li [7] proposed the following SOR-type iteration for solving Eq. (1) developing the exploited idea in [9] and assuming that \({\mathscr {A}}\) and \({\mathscr {B}}\) are, respectively, left-nonsingular and row diagonal tensors,
where \(A^{-1}\) is the order 2 left inverse of \({\mathscr {A}}\). Here, the initial guess \(x_0\) is given, \({z}_{0}={x}_{0}^{[m-1]},f_0=\vert {x}_{0}\vert \) and \(x_{k+1}=\mathrm {diag}(\mathrm {sgn}(z_k))f_k\). Convergence properties of the above method were discussed and some convergence intervals for \(\omega \) were provided which are not cheap to be verified, for more detail see [7, Theorems 4.1, 4.2 and 4.3].
The current section deals with constructing an iterative scheme for solving TAVEs in the form (1). We first present the method and briefly discuss its convergence properties. Then, some experimental results are reported to illustrate the applicability of proposed approach for solving TAVEs and its superiority over the SOR-type method.
3.1 Proposed Method
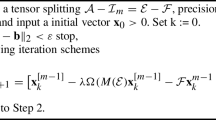
Motivated by discussions in [8, 9, 19] for standard AVEs, here, we consider the performance of following iterative method for solving \({\mathscr {A}}x^{m-1}-{\mathscr {B}}\vert x\vert ^{m-1}=b\),
where \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) is a given suitable splitting, the initial guess \(x_0\) together with parameter \(\alpha \) are given and \({f_0=\vert x_0\vert }\). Here, we prove the convergence of the above method under some restrictions. It should be emphasized that the convergence of (12) under more relaxed hypotheses need more study. To conclude the convergence, as a sufficient condition, the tensors \(\bar{{\mathcal {G}}}_1=M({\mathscr {E}})^{-1}{\mathscr {F}}\) and \(\bar{{\mathcal {G}}}_2=M({\mathscr {E}})^{-1}{\mathscr {B}}\) need to be satisfied the following relation,
for arbitrary vectors \(v_1,v_2,w_1\) and \(w_2\) and prescribed splitting \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\). Clearly, the above relation follows immediately when \(m=2\). In addition, it is not difficult to see that the above inequality holds when \({\mathscr {A}}\) and \({\mathscr {B}}\) are, respectively, left-nonsingular and row diagonal tensors similar to the assumptions set in [7].
Proposition 14
Let \({\mathscr {A}}\) and \( {\mathscr {B}}\) belong to \({\mathbb {R}}^{[m,n]}\). Assume that there exists a splitting \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) such that the condition (13) holds for \(\bar{{\mathcal {G}}}_1=M({\mathscr {E}})^{-1}{\mathscr {F}}\) and \(\bar{{\mathcal {G}}}_2=M({\mathscr {E}})^{-1}{\mathscr {B}}\). If \(\Theta :={\Vert \bar{{\mathcal {G}}}_1\Vert }_\infty +{\Vert \bar{{\mathcal {G}}}_2\Vert }_\infty <1\), then iterative method (12) is convergent for \( \alpha \in (0,\frac{2}{1+\Theta }). \)
Proof
For notation simplicity, we set \(\nu :={\Vert \bar{{\mathcal {G}}}_1\Vert }_\infty \) and \(\ell :={\Vert \bar{{\mathcal {G}}}_2\Vert }_\infty \). Let \(e(k,x)=x^{[m-1]}_k-x^{[m-1]}_{k-1}\) and \(e(k,f)=f^{[m-1]}_k-f^{[m-1]}_{k-1}\). From Eqs. (12a) and (12b), it can be verified that
where \({\mathcal {E}}_k:=[e(k,x);e(k,f)]\) and
Evidently, we can conclude that \({\Vert {\mathcal {E}}_{k+1}\Vert }_\infty < \eta {\Vert {\mathcal {E}}_{k}\Vert }_\infty \) where \(\eta :={\Vert {\mathcal {W}}\Vert }_\infty <1\). Therefore, we can deduce that \(\{(x_k^{[m-1]};f_k^{[m-1]})\}_{k=1}^{\infty }\) is a Cauchy sequence which shows that the sequence \(\{(x_k^{[m-1]};f_k^{[m-1]})\}_{k=1}^{\infty }\) converges. \(\square \)
Remark 1
We comment that under assumptions of Proposition 14, we deduce that the sequences \(\{x_k^{[m-1]}\}_{k=1}^{\infty }\) and \(\{f_k^{[m-1]}\}_{k=1}^{\infty }\) are convergent. Let \(\mathop {\lim }\limits _{k \rightarrow \infty } x_k^{[m-1]}=\tilde{\ell }\). If either m is even or \(\tilde{\ell }>0\), then we can deduce that \(\tilde{\ell }^{[\frac{1}{m-1}]}\) is the solution of (1).
Regardless to the assumption (13), we could only prove that the iteration (12) converges to nonnegative solution of (1) for \(\alpha \in (0,1]\) under certain conditions given in the following proposition.
Proposition 15
Let \({\mathscr {A}}\) and \( {\mathscr {B}}\ge 0\) belong to \({\mathbb {R}}^{[m,n]}\). Assume that there exist a weak regular splitting \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) such that the \(\Theta :={\Vert \bar{{\mathcal {G}}}_1\Vert }_\infty +{\Vert \bar{{\mathcal {G}}}_2\Vert }_\infty <1\) where \(\bar{{\mathcal {G}}}_1=M({\mathscr {E}})^{-1}{\mathscr {F}}\) and \(\bar{{\mathcal {G}}}_2=M({\mathscr {E}})^{-1}{\mathscr {B}}\). If \(M({\mathscr {E}})^{-1} b \ge 0\), \(0 \le x_0 \le (M({\mathscr {E}})^{-1} b)^{[\frac{1}{m-1}]}\) and \(f_0=x_0\), then iterative method (12) is convergent for \( 0 < \alpha \le 1. \)
Proof
In view of (12a), we can verify that \(x_1^{[m-1]} -x_0^{[m-1]} \ge 0\). By induction, one can observe that \(x_k^{[m-1]} -x_{k-1}^{[m-1]} \ge 0\) and \(f_k^{[m-1]} -f_{k-1}^{[m-1]} \ge 0\) for \(k=1,2,\ldots \) which ensures that the sequences \(\{x_k^{[m-1]}\}_{k=1}^{\infty }\) and \(\{f_k^{[m-1]}\}_{k=1}^{\infty }\) are increasing. It turns out that each entries of vectors \(x_k^{[m-1]}\) and \(f_k^{[m-1]}\) are nonnegative and bounded above by \( {{\Vert M({\mathscr {E}})^{-1}b\Vert }_\infty }{(1-\Theta )}^{-1}. \) Now the assertion can be concluded from the fact that the sequence produced by iteration (12) is bounded above. \(\square \)
3.2 Numerical Experiments
The numerical experiments, reported in this part, were performed on a 64-bit 2.50 GHz core i5 processor with Matlab R2021a. The iterations were terminated once the maximum iteration number 10000 reached or the k-th approximate solution (denoted by \(x_k\)) satisfies the following stopping criterion
where the initial vector \(x_0\) is taken to be zero.
In the tables below, we report the elapsed CPU times (in second) and required iteration numbers for the iterative methods to satisfy the exploited stopping criterion under “CPU-time (sec)" and “Iteration", respectively. The notation dash (−) in tables shows that the method could not provide a suitable approximation with respect to the mentioned stopping criterion after 10000 iterations. Given integer n the notation \(|\mathrm{rand}|(n)\) (\(|\mathrm{rand}|(n,1)\)) denotes the Matlab function that generates \(n\times n\) matrix (n-dimensional vector) whose entries are uniformly distributed random numbers in the interval [0, 1].
In view of discussions in [19, Subsection 2.2], we experimentally examined the following parameter as an approximation for the optimum value of the parameter \(\alpha \) in (12),
In particular, it is numerically observed that the above value provides a suitable estimation for optimum value of the parameter when \({\Vert M({\mathscr {A}})^{-1}\Vert }_2<1\), for more details see Figs. 1,3,6 and 7 .
For the following four test problems, we consider the splitting \({\mathscr {A}}={\mathscr {E}}-{\mathscr {F}}\) with \({\mathscr {E}}=M({\mathscr {A}}){\mathscr {I}}\). Notice that \( {\mathscr {F}}\) is a zero tensor for Examples 3, 4 and 5 . Basically in the these three examples, tensors \({\mathscr {A}}\) and \({\mathscr {B}}\) are, respectively, left nonsingular and row diagonal. As a result, to solve the corresponding TAVE, both SOR-type method and iterative method (12) can be used considering the earlier discussion.
The tensor \({\mathscr {A}}-{\mathscr {B}}\) in Example 3 is a strong \({\mathcal {M}}\)-tensor which arises from an ordinary differential equation with Dirichlet’s boundary conditions. We comment that the tensor \({\mathscr {A}}-{\mathscr {B}}\) in this example is also used in [7, Example 5.2] and [11, Example 7.5].
Example 3
Let \({\mathscr {A}},{\mathscr {B}}\in {\mathbb {R}}^{[3,n]}\) and \(b\in {\mathbb {R}}^n\) with \(n=200\), and
where \(c_0 = 1/2, c_1 = 1/3\) and \( \gamma = 2\). It can be verified that the condition \({\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_{\infty }<1\) holds. The obtained results associated with the performance of the mentioned iterative methods are disclosed in Table 1. As seen, the proposed iterative method surpasses the previously presented approach in [7] commenting that no information about the optimum value of the parameter \(\omega \) is available. The performances of methods with respect to different values of \(\alpha \) and \(\omega \) are also illustrated in Figs. 1 and 2 , for more details.

Example 3: Required number of iterations (left) and CPU-times (sec) (right) versus \(\alpha \) for the proposed iterative method

Example 3: Required number of iterations (left) and CPU-times (sec) (right) versus \(\omega \) for the SOR-type method
In Examples 4 and 5 , the SOR-type method and proposed approach for solving TAVEs are used for artificial random test problems. The corresponding results are presented in Tables 2 and 3 . Overall, for both of these examples, the proposed approach outperforms the SOR-type method. However, the obtained results in Example 4 illustrates that the approaches can be competitive.
Example 4
Let \(n=10\) and \({\mathscr {C}}=C{\mathscr {I}} \in {\mathbb {R}}^{[4,n]}\) be a nonnegative tensor with \(C=3|\mathrm{rand}|(n)\). We set \({\mathscr {B}}={\mathscr {I}}\) and \({\mathscr {A}}=2\rho ({\mathscr {C}}) {\mathscr {I}}-{\mathscr {C}}\) commenting that \(\rho ({\mathscr {C}})=15.6250\) is computed by the power method. The right-hand side vector is \(b=-|\mathrm{rand}|(n,1)\). For more details, the matrix C and the vector b, respectively, are given as follows:
Here, \({\mathscr {A}}-{\mathscr {B}}\) is strong \({\mathcal {M}}\)-tensor and the right-hand side is a negative vector. The existence of solution for the mentioned TAVE can be concluded from Proposition 4 using the fact that \({\mathscr {F}}\) is a zero tensor and \({\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_{\infty }<1\). In Table 2, we report the results for applying SOR-type method and iterative scheme (12). As seen, here, proposed approach works slightly better than SOR-type method. For further details, we plot the performances of examined methods with respect to different values of \(\alpha \) and \(\omega \) in Figs. 3 and 4.

Example 4: Required number of iterations (left) and CPU-times (sec) (right) versus \(\alpha \) for the proposed iterative method

Example 4: Required number of iterations (left) and CPU-times (sec) (right) versus \(\omega \) for the SOR-type method
Example 5
Let \(n=50\) and \({\mathscr {C}}=C{\mathscr {I}}\in {\mathbb {R}}^{[4,n]}\) be a nonnegative tensor with \(C=|\mathrm{rand}|(n)\). Using power method, the spectral radius of \({\mathscr {C}}\) was computed and the constant \(\eta \) was chosen such that \({\mathscr {A}}=\eta {\mathscr {I}}-{\mathscr {C}}\) is a strong \({\mathcal {M}}\)-tensor. In TAVE (1), the right-hand side vector is \(b=[1;2;\cdots ;n]\) and \({\mathscr {B}}=0.01{\mathscr {A}}\). More precisely, here, \(\rho ({\mathscr {B}})=25.2570\) and \(\eta =27.2570\). It could be verified that \({\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_{\infty }<1\). In Table 3, we disclose the numerical results associated with the considered methods. As seen, here, proposed approach is superior to the SOR-type method. For further details, we plot the performances of examined methods with respect to different values of \(\alpha \) and \(\omega \) in Figs. 5 and 6 .

Example 5: Required number of iterations (left) and CPU-times (sec) (right) versus \(\alpha \) for the proposed iterative method

Example 5: Required number of iterations (left) and CPU-times (sec) (right) versus \(\omega \) for the SOR-type method
In the last example, we choose the tensor \({\mathscr {A}}\) such that \({\mathscr {A}}=M({\mathscr {A}}){\mathscr {I}}\) does not hold. This implies that \({\mathscr {A}}\) is not left-nonsingular tensor, therefore the SOR-type method cannot be used for solving the corresponding TAVE.
Example 6
Let \(n=10\) and \(C=|\mathrm{rand}|(n)\). In TAVE (1), we set \({\mathscr {B}}={\mathscr {I}}\) and constructed the tensor \({\mathscr {A}}\in {\mathbb {R}}^{[4,n]}\) such that \(a_{ikkkk}= n^2C_{ik}\) for \(i,k=1,2,\ldots ,n\), \(a_{ii+1i-1i+1}=a_{iiii+1}=2\) for \(2,3,\dots ,n-1\), and other entries of \({\mathscr {A}}\) are zero. The right-hand side vector is \(b=|\mathrm{rand}|(n,1)\). Here, the condition \({\Vert M({\mathscr {E}})^{-1}{\mathscr {F}}\Vert }_{\infty }+{\Vert M({\mathscr {E}})^{-1}{\mathscr {B}}\Vert }_{\infty }<1\) is hold. In Table 4, we represent the obtained numerical experiments for using iterative scheme (12). The results demonstrate that the proposed approach is feasible for solving the corresponding TAVE. We also display the performances of examined method with respect to different values of \(\alpha \) in Fig. 7.

Example 6: Required number of iterations (left) and CPU-times (sec) (right) versus \(\alpha \) for the proposed iterative method
4 Concluding Results and Future Work
We theoretically discussed on existence and nonexistence of solutions for a class of TAVEs in the following form
Part of the discussions was inspired by the results in [7] for the solvability of the preceding TAVE in which the coefficient tensors \({\mathscr {A}}\) and \({\mathscr {B}}\) were, respectively, assumed to be left nonsingular and row diagonal. In this paper, we obtained some new results for (non)solvability of TAVEs under certain conditions regardless to left nonsingularity of \({\mathscr {A}}\) commenting that the established results remain valid for TAVEs in the form \({\mathscr {A}}x^{m-1}-\vert x\vert ^{[m-1]}=b\). In addition, we proposed an iterative scheme for solving the mentioned TAVE and briefly discussed on convergence properties of the method. Developing a more feasible iterative scheme whose convergence can be established under fewer assumptions is a project to be undertaken in the future.
Notes
To ease the notation, throughout this paper, the set of all n-dimension real tensors of m-order is denoted by \({\mathbb {R}}^{[m,n]}\), i.e., \({\mathbb {R}}^{[m,n]}:={{\mathbb {R}}^{\overbrace{n \times \cdots \times n}^{m - {\mathrm {times}}}}}\).
We write \((x_1;x_2;\ldots ;x_n)\) to represent the vector \((x_1,x_2,\ldots ,x_n)^T\).
References
Bu, F., Ma, C.F.: The tensor splitting methods for solving tensor absolute value equation. Comput. Appl. Math. 39, 178 (2020)
Ding, W., Qi, L., Wei, Y.: \({\cal{M}}\)-tensors and nonsingular \({\cal{M}}\)-tensors. Linear Algebra Appl. 439, 3264–3278 (2013)
Ding, W., Wei, Y.: Solving multi-linear systems with \({\cal{M}}\)-tensors. J. Sci. Comput. 68, 689–715 (2016)
Du, S., Zhang, L., Chen, C., Qi, L.: Tensor absolute value equations. Sci. China Math. 61, 1695–1710 (2018)
Hashemi, B.: Sufficient conditions for the solvability of a Sylvester-like absolute value matrix equation. Appl. Math. Lett. 112, 106818 (2021)
Huang, Z.H., Qi, L.: Formulating an \(n\)-person noncooperative game as a tensor complementarity problem. Comput. Optim. Appl. 66, 557–576 (2017)
Jiang, Z., Li, J.: Solving tensor absolute value equation. Appl. Numer. Math. 170, 255–268 (2021)
Ke, Y.F.: The new iteration algorithm for absolute value equation. Appl. Math. Lett. 99, 105990 (2020)
Ke, Y.F., Ma, C.F.: SOR-like iteration method for solving absolute value equation. Appl. Math. Comput. 311, 195–202 (2017)
Kolda, T.G., Bader, B.W.: Tensor decompositions and applications. SIAM Rev. 51, 455–500 (2009)
Li, W., Liu, D., Vong, S.-W.: Comparison results for splitting iterations for solving multi-linear systems. Appl. Numer. Math. 134, 105–121 (2018)
Ling, C., Yan, W., He, H., Qi, L.: Further study on tensor absolute value equations. Sci. China Math. 63, 2137–2156 (2020)
Liu, D., Li, W., Vong, S.Q.: The tensor splitting with application to solve multi-linear systems. J. Comput. Appl. Math. 330, 75–94 (2015)
Luo, Z., Qi, L., Xiu, N.: The sparsest solutions to \({\cal{Z}}\)-tensor complementarity problems. Optim. Lett. 11, 471–482 (2017)
Mangasarian, O.L., Meyer, R.R.: Absolute value equations. Linear Algebra Appl. 419, 359–367 (2006)
Qi, L.: Eigenvalues of a real supersymmetric tensor. J. Symb. Comput. 40, 1302–1324 (2005)
Shao, J.Y.: A general product of tensors with applications. Linear Algebra Appl. 439, 2350–2366 (2013)
Shao, J.Y., You, L.H.: On some properties of three different types of triangular blocked tensors. Linear Algebra Appl. 511, 110–140 (2016)
Shams, N.N., Fakharzadeh, A., Beik, F.P.A.: Iterative schemes induced by block splittings for solving absolute value equations. FILOMAT 34, 4171–4188 (2020)
Zhang, L., Qi, L., Zhou, G.: \(M\)-tensors and some applications. SIAM J. Matrix Anal. Appl. 35, 437–452 (2014)
Acknowledgements
The authors would like to thank anonymous referees for their careful reading of the manuscript and helpful suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Rosihan M. Ali.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Beik, F.P.A., Najafi-Kalyani, M. & Mollahasani, S. On the Solvability of Tensor Absolute Value Equations. Bull. Malays. Math. Sci. Soc. 45, 3157–3176 (2022). https://doi.org/10.1007/s40840-022-01370-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-022-01370-5
Keywords
- Tensor absolute value equation
- Solvability
- Left-nonsingular tensor
- Row diagonal tensor
- Strong \({\mathcal {M}}\)-tensor
- Iterative method