
Abstract
In this paper, nonlinear Fredholm integral equation of the second kind is solved by using parameter continuation method. Then, we propose parameter continuation method to solve perturbed nonlinear Fredholm integral equation of the second kind, which appear as an extension of the method of contractive mapping and parameter continuation method for solving nonlinear Fredholm integral equation of the second kind. Illustrative examples are presented to show the effectiveness and convenience of parameter continuation method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Many problems which arise in mathematics, physics, biology, etc., lead to nonlinear integral equations. Since nonlinear integral equations are usually difficult to get their exact solution, therefore, many authors have worked on analytical methods and numerical methods for solution of this kind of equations. Many analytical methods and numerical methods have emerged, such as The successive approximations method [2, 20, 23], Newton–Kantorovich method [2, 4, 14], Quadrature method [3], Adomian decomposition method [23], Homotopy analysis method [9, 21] and so on. Recently, polynomial approximation methods using different base functions, such as Chebyshev polynomials, Legendre polynomials, fractional-order Bernoulli functions have been introduced; see, for example, [5, 10, 15]. Modified Newton method has been given in [7].
Parameter continuation method was suggested and developed by Bernstein [1] and Schauder [8], which is the inclusion of the equation \(P(x) = 0\) into the one-parametric family of equations \(G(x, \varepsilon ) = 0, \varepsilon \in [0,1]\) connecting the given equation \((\varepsilon = 1)\) with a solvable equation \((\varepsilon = 0)\) and study the dependence of the solution from parameter. Later on, Trenoghin [16,17,18,19] has developed a generalized variants of the parameter continuation method and used to prove the invertibility of nonlinear operators, which map a metric space or a weak metric space into a Banach space. Gaponenko [6] proposed and justified the parameter continuation method for solving operator equations of the second kind with a Lipschitz-continuous and monotonic operator, which operates in an arbitrary Banach space. Ninh [11, 12] has studied parameter continuation method for solving the operator equations of the second kind with a sum of two operators. Vetekha [22] presented the application of parameter continuation method to solving the boundary value problem for the ordinary differential equations of second order. However, parameter continuation method for nonlinear Fredholm integral equation of the second kind had not been researched.
In this work, we study the application of parameter continuation method for solving nonlinear Fredholm integral equation of the second kind in general case. Furthermore, parameter continuation method for solving perturbed nonlinear Fredholm integral equation of the second kind is proposed. Our proposal can be viewed as an extension of the application of the method of contractive mapping and the application of parameter continuation method for solving nonlinear Fredholm integral equation of the second kind.
The remainder of this paper is structured as follows. In Sect. 2, the parameter continuation method for solving operator equations of the second kind is briefly presented. In this section, we recall some definitions and results that will be useful in the sequel. In Sect. 3, we apply parameter continuation method for solving nonlinear Fredholm integral equation of the second kind in general case, followed in Sect. 4 parameter continuation method for solving perturbed nonlinear Fredholm integral equation of the second kind is proposed. Some illustrative examples are shown in Sect. 5. Finally, Sect. 6 draws some conclusions from the paper.
2 Parameter Continuation Method for Solving Operator Equations of the Second Kind
In this section, we recall some definitions and results which we will use in the sequel. For details, we refer to [6].
Let X be a Banach space and A be a mapping, which operates in the space X. Consider the operator equation of the second kind
Definition 1
[6] The mapping A, which operates in the Banach space X is called monotone if for any elements \(x_1, x_2 \in X\) and any \(\varepsilon >0\) the following inequality holds
Remark 1
[6] If X is Hilbert space then the condition of monotony (2) is equivalent to the classical condition
where \(\left\langle , \right\rangle \) is an inner product in the Hilbert space X.
Lemma 1
[6] Assume that A is a monotonic mapping which operates in the Banach space X. Then, for any elements \(x_1, x_2 \in X\) and any positive numbers \(\varepsilon _1, \varepsilon _2, 0 < \varepsilon _1 \le \varepsilon _2 \le 1\), the following inequality holds
The basic idea of the parameter continuation method for solving operator equation of the second kind (1) is as follows. Consider a one-parametric family of equations
which when \(\varepsilon =0\) gives the trivial equation \(x=f\) and when \(\varepsilon =1\) gives the initial Eq. (1). Dividing [0, 1] into N equal parts with N is a natural number such that \(q = L \varepsilon _0 <1, \varepsilon _0 = \frac{1}{N}\), where L is Lipschitz coefficient of the operator A. After \(N-1\) changes of variables
we construct intermediate equations with contractive operators in new variables. By virtue of the monotony and Lipschitz-continuous of the operator A, contraction coefficients of these contractive operators equal q. By shifting the parameter \(\varepsilon \) step by step \(\varepsilon _0\) from 0 to 1, we can verify that the Eq. (1) has a unique solution.
Theorem 1
[6] Suppose that the mapping A, which operates in the Banach space X is Lipschitz-continuous and monotonic. Then, the Eq. (1) has a unique solution for any element \(f \in X\).
The following iteration process is constructed to find approximate solutions of the Eq. (1)
The symbolic notation (5) should be understood as the following iteration processes, which consist of N iteration processes
In the case \(\varepsilon _0 = \frac{1}{2}\) (two steps by parameter \(\varepsilon \)), the Eq. (1) can be written as the following form
We shall carry out a change of variable
After changing the variable (8), the Eq. (7) will take the following form
The approximate solutions of the Eq. (9) are obtained by using the standard iteration process
At the same time at each step of above iteration process when calculating the value \(G_1^{-1}(x^{(1)}_j)\), we will again use the standard iteration process
As a result, the approximate solutions of the Eq. (7) can be found by the following iteration processes
It is convenient to write Eqs. (8) and (9) in terms of the initial variable x. Thus, the iteration processes (10) can be written as the following iteration process
etc. The case \(\varepsilon _0 = \frac{1}{N}\) (N steps by parameter \(\varepsilon \)) leads us to iteration process (5). For simplicity, assume that \(A (0) = 0\) and the number of steps in each iteration scheme of the iteration process (5) is the same and equals n. Denoting \(x(n,N) \equiv x_n\) as the approximate solutions of the Eq. (1), which is constructed by the iteration process (5). In this case, Y. L. Gaponenko received the error estimations of approximate solutions of the Eq. (1), which are presented in the following theorem.
Theorem 2
[6] Assume that the conditions of Theorem 1 are satisfied. Then, the sequence of approximate solutions \(\{x(n,N)\}, n = 1, 2, \ldots \) constructed by iteration process (5) converges to the exact solution x of the Eq. (1). Moreover, the following estimates hold
where L is Lipschitz coefficient of the operator A, N is the smallest natural number such that \(q = \frac{L}{N}<1, n = 1, 2, \ldots \;\).
3 Nonlinear Fredholm Integral Equation of the Second Kind
Consider the following nonlinear Fredholm integral equation
where K(t, s, x) and f(t) are known functions, x(t) is an unknown function that will be determined.
Theorem 3
Suppose that the following conditions are satisfied
-
(i)
\(f(t) \in L^2[a,b]\);
-
(ii)
K(t, s, x) satisfies a Lipschitz condition of the type
$$\begin{aligned} \left| K(t,s,x) - K(t,s,y) \right| \le \left| {\varPhi }(t,s) \right| \left| x-y\right| , \end{aligned}$$for all \(a \le t,s \le b\) and for all reals x, y, where \({\int \nolimits _a^b \int \nolimits _a^b{\left| {\varPhi }(t,s) \right| ^2\mathrm{d}s\mathrm{d}t}=L^2<\infty }\);
-
(iii)
K(t, s, x) satisfies the condition
$$\begin{aligned} \int \limits _a^b{ \left\{ \int \limits _a^b { \left[ K(t,s,x(s)) - K(t,s,y(s))\right] \mathrm{d}s}\right\} \left[ x(t) - y(t)\right] \mathrm{d}t} \ge 0. \end{aligned}$$
Then, the nonlinear Fredholm integral equation of the second kind (12) has a unique solution \(x(t) \in L^2[a,b]\).
Proof
Define the operator F as
From the assumption (ii), for any \(x(t), y(t) \in L^2[a,b]\) we have
By Cauchy–Schwarz inequality, we obtain
Thus
It follows that the operator F is Lipschitz-continuous with Lipschitz coefficient equal to L. From the assumption (iii), we have
Hence, F is a monotonic operator. By Theorem 1, the nonlinear Fredholm integral equation (12) has a unique solution \(x(t) \in L^2[a,b]\). This completes the proof of the theorem. \(\square \)
Substituting F for A in the iteration processes (6), the approximate solutions of the nonlinear Fredholm integral equation (12) can be found by the following iteration processes
where \((G_1x)(t) = x(t)+\varepsilon _0 (Fx)(t)\), \((G_{k+1} x^{(k)})(t) = x^{(k)}(t) + \varepsilon _0 (FG_1^{-1} \cdots G_{k}^{-1}\)\(x^{(k)})(t),\; k = 1, 2, \ldots , N-2\), N is the smallest natural number such that \( q = \frac{L}{N}<1\). Assume that the number of steps in each iteration scheme of the iteration processes (13) is the same and equals n. Denoting \(x(n,N)(t) \equiv x_n(t)\) as the approximate solutions of the nonlinear Fredholm integral equation (12), which is constructed by iteration processes (13). In this case, we have the following theorem.
Theorem 4
Assume that the conditions of Theorem 3 are satisfied. Then, the sequence of approximate solutions \(\{x(n,N)(t)\}, n = 1, 2, \ldots \) constructed by iteration processes (13) converges to the exact solution \(x(t) \in L^2[a,b]\) of the nonlinear Fredholm integral equation (12). Moreover, the following estimates hold
where N is the smallest natural number such that \(q = \frac{L}{N}<1, n = 1, 2,\ldots \; \).
Proof
For simplicity, we assume that \((F0)(t) = \int \nolimits _a^b {K(t,s,0) \mathrm{d}s} = 0\), where \(0(t) = 0\) denotes the zero element in \(L^2[a,b]\). Indeed, if \( (F0)(t) \ne 0\), we can define an operator \(T: L^2[a,b] \rightarrow L^2[a,b]\) by
then \((T0)(t)=0\) and the nonlinear Fredholm integral equation (12) is equivalent to
where \(Q(t,s,x(s)) = K(t,s,x(s)) - K(t,s,0), g(t) = f(t) - \int \nolimits _a^b{K(t,s,0)\mathrm{d}s}\). Also, for all \(a \le t,s \le b\) and for all reals x, y we have \(Q(t,s,x) - Q(t,s,y) = K(t,s,x) - K(t,s,y)\). Hence, the functions g(t), Q(t, s, x) satisfy the conditions of Theorem 3. The proof of Theorem 3 is similar to the proof of Theorem 1. In the proof of Theorem 3, we include the nonlinear Fredholm integral equation (12) into a one-parametric family nonlinear Fredholm integral equations
which when \(\varepsilon = 0\) gives the trivial equation \(x(t) = f(t)\) and when \(\varepsilon =1\) gives the nonlinear Fredholm integral equation (12). We take a minimal natural number N such that \(q=\varepsilon _0 L <1, \varepsilon _0=\frac{1}{N}\). Consider the following subsidiary problems.
Problem 1 (one step by parameter \(\varepsilon \)). Consider the nonlinear Fredholm integral equation
Since the operator \(\varepsilon _0F\) is a contractive operator with contraction coefficient equal to \(q < 1\), it follows that the integral equation (15) has a unique solution \(x(\varepsilon _0)(t)\) for any \(f(t) \in L^2[a,b]\). The approximate solutions of the integral equation (15) are obtained by using the standard iteration process
By the contraction mapping principle, we have
Since \( (F0)(t) = 0\), it follows that
Thus, the error of approximate solutions \(x_n(t)\) of Problem 1 gives the estimate
where
Problem 2 (two steps by parameter \(\varepsilon \)). Consider the nonlinear Fredholm integral equation
We shall carry out a change of variable
The integral equation (19) has a unique solution for any \(x^{(1)}(t) \in L^2[a,b]\), i.e., the operator \(G_1^{-1}\) is determined in the whole space \(L^2[a,b]\). By virtue of the monotony of the operator F, the operator \(G_1^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1. Indeed, for any \(x^{(1)}(t), {\overline{x}}^{(1)}(t) \in L^2[a,b]\), we have
After changing the variable (19), the integral equation (18) will take the following form
The operator \(\varepsilon _0FG_1^{-1}\) is a contractive operator with contraction coefficient equal to \(q < 1\). Hence, the integral equation (20) has a unique solution for any \(f(t) \in L^2[a,b]\). Therefore, the integral equation (18) has a unique solution \(x(2\varepsilon _0)(t)\) for any \(f(t) \in L^2[a,b]\). The approximate solutions of the integral equation (20) are obtained by using the standard iteration process
At the same time at each step of above iteration process when calculating the value \((G_1^{-1} x^{(1)}_j )(t)\), we will again use the standard iteration process
As a result, the approximate solutions of the integral equation (18) can be found by the following iteration processes
The values \((G_1^{-1} x^{(1)}_j )(t)\) are calculated by using the iteration process (22) with the error \(\mu (n)\). Since \(\varepsilon _0 F\) is a contractive operator with contraction coefficient equal to \(q < 1\), the error \(\mu (n)\) in specifying the argument of the operator \(\varepsilon _0 F\) is equivalent to the error \(q \mu (n)\) in specifying the right-hand side f(t) of the integral equation (20). On the other hand, the operator \(G_2^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1. Indeed, for any \(f(t), {\overline{f}}(t) \in L^2[a,b]\), by Lemma 1 we have
Hence, the substitution of the error \(q \mu (n)\) into the right-hand side f(t) of the integral equation (20) causes an error of not more than \(q \mu (n)\) in the corresponding solution \(x^{(1)}(t)\). The error of an iteration process in the calculation of \(x^{(1)}(t)\) equals \(\frac{q^n}{1-q} \Vert x^{(1)}_1(t) - x^{(1)}_0(t) \Vert \). Since \( (F0)(t) = 0\), we have \( (G_10)(t) = 0(t) + \varepsilon _0 (F0)(t) = 0\). Thus
Then, the error of an iteration process in the calculation of \(x^{(1)}(t)\) equals \(\frac{q^{n+1}}{1-q}\Vert f(t)\Vert = \mu (n)\). Hence
The inverse substitution, i.e., the transition from the variable \(x^{(1)}(t)\) to the variable x(t) again introduces the error \(\mu (n)\). Consequently, the error of approximate solutions \(x_n(t)\) of Problem 2 gives the estimate
By using similar arguments for the Problem k: \(x(t) + k\varepsilon _0 (Fx)(t) = f(t), k \in [1,N] \), we obtain the estimation
where
We shall rewrite inequality (25) in the following form
By virtue of the discrete analogue of the well-known Bellman–Gronwall lemma (see [13, Theorem 1.28]), from inequality (26), we get
Consequently, we can rewrite the estimation of the error (24) for problem k as the form
Substituting N for k and by (17), we obtain (14). This completes the proof of the theorem. \(\square \)
4 Perturbed Nonlinear Fredholm Integral Equation of the Second Kind
In this section, we propose parameter continuation method for solving perturbed nonlinear Fredholm integral equation of the second kind as follows
where \(K(t,s,x), K_1(t,s,x)\) and f(t) are known functions, x(t) is an unknown function that will be determined.
Now, the perturbed nonlinear Fredholm integral equation of the second kind (27) will be investigated under the assumptions:
-
(i)
\(f(t) \in L^2[a,b]\);
-
(ii)
K(t, s, x) satisfies a Lipschitz condition of the type
$$\begin{aligned} \left| K(t,s,x) - K(t,s,y) \right| \le \left| {\varPhi }(t,s) \right| \left| x-y\right| , \end{aligned}$$for all \(a \le t,s \le b\) and for all reals x, y, where \({ \int \nolimits _a^b \int \nolimits _a^b {\left| {\varPhi }(t,s) \right| ^2\mathrm{d}s\mathrm{d}t}=L^2< \infty }\);
-
(iii)
K(t, s, x) satisfies the condition
$$\begin{aligned} \int \limits _a^b{ \left\{ \int \limits _a^b { \left[ K(t,s,x(s)) - K(t,s,y(s))\right] \mathrm{d}s}\right\} \left[ x(t) - y(t)\right] \mathrm{d}bt} \ge 0; \end{aligned}$$ -
(iv)
\(K_1(t,s,x)\) satisfies the condition
$$\begin{aligned} \left| K_1(t,s,x) - K_1(t,s,y) \right| \le \left| \varphi (t,s) \right| \left| x-y\right| , \end{aligned}$$for all \(\;\!{a \le t,s \le b}\) and for all reals x, y, where \({\int \nolimits _a^b \int \nolimits _a^b{\left| \varphi (t,s) \right| ^2\mathrm{d}s\mathrm{d}t}=B^2, B<1}\).
Let \(F, F_1\) be two operators defined on the space \( L^2[a,b]\) by
From the assumptions (ii) and (iii), it follows that the operator F is monotonic and Lipschitz-continuous with Lipschitz coefficient equal to L (see the proof of Theorem 3). From the assumption (iv), for any \(x(t), y(t) \in L^2[a,b]\) we have
By Cauchy–Schwarz inequality, we obtain
Hence
Since \(B<1\), it follows that \(F_1\) is a contractive operator with contraction coefficient equal to \({\overline{q}} = B<1\). We take a minimal natural number N such that \(q=\varepsilon _0 L <1, \varepsilon _0=\frac{1}{N}\). The perturbed nonlinear Fredholm integral equation (27) can be written as the following form
Consider the following subsidiary problems.
Problem 1 (\(N=1\)). Consider the perturbed nonlinear Fredholm integral equation
We shall carry out a change of variable
For any \(x(t), {\overline{x}}(t) \in L^2[a,b]\), we have
Hence, \(\varepsilon _0 F\) is a contractive operator with contraction coefficient equal to \(q=\varepsilon _0 L <1\). Then, the integral equation (30) has a unique solution for any \(x^{(1)}(t) \in L^2[a,b]\), i.e., the operator \((G_1^{-1}x^{(1)})(t)\) is determined in the whole space \(L^2[a,b]\). By virtue of the monotony of the operator F, the operator \(G_1^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1. Indeed, for any \(x^{(1)}(t), {\overline{x}}^{(1)}(t) \in L^2[a,b]\), we have
After changing the variable (30), the integral equation (29) will take the following form
For any \(x^{(1)}(t), {\overline{x}}^{(1)}(t) \in L^2[a,b] \), we have
Thus, \(F_1G_1^{-1}\) is a contractive operator with contraction coefficient equal to \({\overline{q}} <1\). Then, the integral equation (31) has a unique solution for any \(f(t) \in L^2[a,b]\). Consequently, the integral equation (29) has a unique solution \(x(\varepsilon _0)(t) \) for any \(f(t) \in L^2[a,b]\). The approximate solutions of the integral equation (31) are obtained by using the standard iteration process
At the same time at each step of above iteration process when calculating the value \((G_1^{-1} x^{(1)}_j )(t)\), we will again use the standard iteration process
As a result the approximate solutions of the integral equation (29) can be found by the following iteration processes
Problem 2 (\(N=2\)). Consider the perturbed nonlinear Fredholm integral equation
We shall carry out two changes of variables
For any \(x^{(1)}(t), {\overline{x}}^{(1)}(t) \in L^2[a,b]\), we have
Hence \(\varepsilon _0 F G_1^{-1}\) is a contractive operator with contraction coefficient equal to \(q<1\). Then the integral equation \(x^{(1)}(t)+ \varepsilon _0 (F G_1^{-1}x^{(1)})(t) = x^{(2)}(t)\) has a unique solution for any \(x^{(2)}(t) \in L^2[a,b]\), i.e., the operator \(G_2^{-1}\) is determined in the whole space \( L^2[a,b]\). By Lemma 1, for any \(x^{(2)}(t), {\overline{x}}^{(2)}(t) \in L^2[a,b]\), we have
Thus, the operator \(G_2^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1. After changing the variables (34), the integral equation (33) will take the following form
For any \(x^{(2)}(t), {\overline{x}}^{(2)}(t) \in L^2[a,b]\), we have
Thus \(F_1 G_1^{-1}G_2^{-1}\) is a contractive operator with contraction coefficient equal to \({\overline{q}} <1\). Then, the integral equation (35) has a unique solution for any \(f(t) \in L^2[a,b]\). Therefore the integral equation (33) has a unique solution \(x(2\varepsilon _0)(t)\) for any \(f(t) \in L^2[a,b]\). The approximate solutions of the integral equation (35) are obtained by using the standard iteration process
At the same time, we will use “subsidiary” iteration processes to invert the operators \(G_1, G_2\) at each step of this iteration process when calculating the value of \((G_1^{-1}G_2^{-1} x^{(2)}_l )(t)\). Hence, the approximate solutions of the integral equation (33) can be found by iteration processes
Problem N (\(N >2\)). Consider the perturbed nonlinear Fredholm integral equation
We shall carry out N changes of variables
In a similar way, we show that the operators \(G_3^{-1}, \ldots , G_{N}^{-1}\) are determined in the whole space \(L^2[a,b]\) and are Lipschitz-continuous with Lipschitz coefficients equal to 1. Hence after the change of variables (38) the integral equation (37) will take the following form
For any \(x^{(N)}(t), {\overline{x}}^{(N)}(t) \in L^2[a,b]\), we have
Thus, \(F_1 G_1^{-1} \cdots G_N^{-1}\) is a contractive operator with contraction coefficient equal to \({\overline{q}} <1\). Then, the integral equation (39) has a unique solution for any \(f(t) \in L^2[a,b]\). Consequently, the integral equation (37) has a unique solution \(x(N\varepsilon _0)(t) \equiv x(t) \in L^2[a,b]\) for any \(f(t) \in L^2[a,b]\). The approximate solutions of the integral equation (39) are obtained by using the standard iteration process
At the same time we will use “subsidiary” iteration processes to invert the operators \(G_1, G_2,\ldots , G_N\) at each step of this iteration process when calculating the value of \( (G_1^{-1}G_2^{-1} \cdots G_N^{-1} x^{(N)}_p )(t)\). Hence, the approximate solutions of the integral equation (37) can be found by iteration processes
The iteration processes (40) can be written as the following symbolic notation
From above obtained results, we have the following theorem.
Theorem 5
Let the assumptions (i)–(iv) be satisfied. Then, the perturbed nonlinear Fredholm integral equation (27) has a unique solution \(x(t) \in L^2[a,b]\).
Proof
As shown above, the operators \({F_1G_1^{-1}, F_1G_1^{-1}G_2^{-1}, \ldots , F_1 G_1^{-1} \cdots G_N^{-1}}\) are contractive operators with contraction coefficients equal to \({\overline{q}} = B<1\) under the assumptions (i)–(iv). Hence, the integral equation (39) has a unique solution for any \(f(t) \in L^2[a,b]\). Thus, the perturbed nonlinear Fredholm integral equation (27), which is equivalent to the integral equation (39) has a unique solution for any \(f(t) \in L^2[a,b]\). This completes the proof of the theorem. \(\square \)
Remark 2
In the perturbed nonlinear Fredholm integral equation (27), we can consider the monotonic and Lipschitz-continuous operator F as the main operator, while the contractive operator \(F_1\) as a perturbation operator or vice versa. This result is an extension of the known result on the application of the method of contractive mapping and above result on the application of parameter continuation method for solving nonlinear Fredholm integral equation of the second kind. Indeed, we consider the two following special cases. When \(F \equiv 0\), the perturbed nonlinear Fredholm integral equation (27) has form \(x(t)+(F_1x)(t)=f(t)\), where the operator \(F_1\) is a contractive operator. When \(F_1 \equiv 0\), the perturbed nonlinear Fredholm integral equation (27) has form \(x(t)+(Fx)(t)=f(t)\), where the operator F is monotonic and Lipschitz-continuous.
Now, we shall estimate the error of approximate solutions of the perturbed nonlinear Fredholm integral equation (27). Assume that the number of steps in each iteration scheme of iteration processes (40) is the same and equals n. Let \(x_n(t)\) be approximate solutions of the perturbed nonlinear Fredholm integral equation (27). Note that \(x_n(t)\) depends on N. Hence, we denote \(x(n,N)(t) \equiv x_n(t)\). We have the following theorem.
Theorem 6
Let the assumptions of Theorem 5 be satisfied. Then the sequence of approximate solutions \( \{x(n,N)(t)\}, n = 1, 2, \ldots \) constructed by iteration processes (40) converges to the exact solution \(x(t) \in L^2[a,b]\) of the perturbed nonlinear Fredholm integral equation (27). Moreover, the following estimates hold
where N is the smallest natural number such that \(q = \frac{L}{N}<1\), \({\overline{q}} = B <1\), \(n= 1, 2, \ldots \;\).
Proof
For simplicity, we assume that \((F0)(t) = \int \nolimits _a^b {K(t,s,0) \mathrm{d}s} = 0\) and \( (F_10)(t) = \int \nolimits _a^b {K_1(t,s,0) \mathrm{d}s} = 0\), where \(0(t) = 0\) denotes the zero element in \(L^2[a,b]\). Indeed, if \( (F0)(t) \ne 0\) or \( (F_10)(t) \ne 0\), we can define two operators \(T, T_1: L^2[a,b] \rightarrow L^2[a,b]\) by
then \( (T0)(t) = (T_10)(t) = 0\) and the perturbed nonlinear Fredholm integral equation (27) is equivalent to
where \(Q(t,s,x(s)) = K(t,s,x(s)) - K(t,s,0), Q_1(t,s,x(s)) = K_1(t,s,x(s)) - K_1(t,s,0)\) and \(g(t) = f(t) - \int \limits _a^b{K(t,s,0)\mathrm{d}s}-\int \limits _a^b {K_1(t,s,0) \mathrm{d}s}\). Also, for all \(a \le t,s \le b\) and for all reals x, y, we have \(Q(t,s,x) - Q(t,s,y) = K(t,s,x) - K(t,s,y)\); \(Q_1(t,s,x) - Q_1(t,s,y) = K_1(t,s,x) - K_1(t,s,y)\). Hence the functions \(g(t), Q(t,s,x), Q_1(t,s,x)\) satisfy the assumptions of Theorem 5. Let us consider successive problems \(1, 2, \ldots , N\). The approximate solutions of Problem 1 assumes are obtained by iteration processes (32). The values \((G_1^{-1}x^{(1)}_j)(t)\) are calculated by using the iteration process
with the error
For any \(k \in \left\{ 1, 2, \ldots , n\right\} \), we have
so that
Since \( (F0)(t) = 0\), we have \( (G_10)(t) = 0(t) + \varepsilon _0 (F0)(t) = 0\). Hence
Then, from above inequality, it follows that
Consequently, the values \((G_1^{-1}x^{(1)}_j)(t)\) are calculated with the error
where
Since \(F_1\) is a contractive operator with contraction coefficient equal to \({\overline{q}} < 1\), the error \({\Delta }_1(n)\) in specifying the argument of the operator \(F_1\) is equivalent to the error \({\overline{q}} {\Delta }_1(n)\) in specifying the right-hand side f(t) of the integral equation (31). On the other hand the operator \(A_1^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to \(\frac{1}{1- {\overline{q}}}\). Indeed, for any \(f(t), {\overline{f}}(t) \in L^2[a,b]\), we have
so that
Hence, the substitution of the error \({\overline{q}} {\Delta }_1(n)\) into the right-hand side of the integral equation (31) causes an error of not more than \(\frac{{\overline{q}}}{1- {\overline{q}}}{\Delta }_1(n)\) in the corresponding solution \(x^{(1)}(t)\). The error of an iteration process in the calculation of \(x^{(1)}(t)\) equals \(\frac{{\overline{q}}^{n+1}}{1-{\overline{q}}}\Vert f(t) \Vert \). Therefore, we have
The inverse substitution, i.e., the transition from the variable \(x^{(1)}(t)\) to the variable x(t) again introduces the error \({\Delta }_1(n)\). Then, the error of approximate solutions \(x_n(t)\) of Problem 1 gives the estimate
The approximate solutions of Problem 2 assumes are obtained by iteration processes (36). The values \((G_1^{-1}G_2^{-1}x^{(2)}_l)(t)\) are calculated by using iteration processes
The values \((G_1^{-1}x^{(1)}_j)(t)\) are calculated by using the iteration process
with the error
We have
Since the operator \(G_2^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1, it follows that
for any \(k \in \left\{ 1, 2,\ldots , n\right\} \). Hence
For any \(k \in \left\{ 1, 2,\ldots , n\right\} \), we have
Thus
Since \( (F0)(t) = 0\), it follows that \( (G_10)(t) = 0(t) + \varepsilon _0 (F0)(t) = 0\) and \( (G_20)(t) = 0(t) + \varepsilon _0 (FG_1^{-1}0)(t) = 0\). Thus
Then, we have
Therefore the values \((G_1^{-1}x^{(1)}_j)(t)\) are calculated with the error
Since \(\varepsilon _0 F\) is a contractive operator with contraction coefficient equal to \(q < 1\), the error \(\mu (n)\) in specifying the argument of the operator \(\varepsilon _0 F\) is equivalent to the error \(q \mu (n)\) in specifying the right-hand side \(x^{(2)}(t)\) of the integral equation \(x^{(1)}(t) + \varepsilon _0 (F G_1^{-1}x^{(1)})(t) = x^{(2)}(t)\). Since the operator \(G_2^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to 1, the substitution of the error \(q \mu (n)\) into the right-hand side of the integral equation \(x^{(1)}(t) + \varepsilon _0 (F G_1^{-1}x^{(1)})(t) = x^{(2)}(t)\) causes an error of not more than \(q \mu (n)\) in the corresponding solution \(x^{(1)}(t)\). The error of an iteration process in the calculation of \(x^{(1)}(t)\) equals \( \frac{q^{n+1}}{1-q}\Vert x^{(2)}_l(t) \Vert \). For any \(l \in \left\{ 1, 2, \ldots , n\right\} \), we have
Then the error of an iteration process in the calculation of \(x^{(1)}(t)\) equals \(\mu (n)\). Hence
The inverse substitution, i.e., the transition from the variable \(x^{(1)}(t)\) to the variable x(t) again introduces the error \(\mu (n)\). Consequently, \((G_1^{-1}G_2^{-1}x^{(2)}_l)(t)\) is calculated with the error
Since \(F_1\) is a contractive operator with contraction coefficient equal to \({\overline{q}} < 1\), the error \({\Delta }_2(n)\) in specifying the argument of the operator \(F_1\) is equivalent to the error \({\overline{q}} {\Delta }_2(n)\) in specifying the right-hand side f(t) of the integral equation (35). On the other hand the operator \(A_2^{-1}\) is Lipschitz-continuous with Lipschitz coefficient equal to \(\frac{1}{1- {\overline{q}}}\). Indeed, for any \(f(t), {\overline{f}}(t) \in L^2[a,b]\), we have
so that
Hence, the substitution of the error \({\overline{q}} {\Delta }_2(n)\) into the right-hand side of the integral equation (35) causes an error of not more than \(\frac{{\overline{q}}}{1- {\overline{q}}}{\Delta }_2(n)\) in the corresponding solution \(x^{(2)}(t)\). The error of an iteration process in the calculation of \(x^{(2)}(t)\) equals \(\frac{{\overline{q}}^{n+1}}{1-{\overline{q}}}\Vert f(t) \Vert \). Therefore, we have
The inverse substitution, i.e., the transition from the variable \(x^{(2)}(t)\) to the variable x(t) again introduces the error \({\Delta }_2(n)\). Then, the error of approximate solutions \(x_n(t)\) of Problem 2 gives the estimate
By using similar arguments for the problem k: \(x(t) + k \varepsilon _0 (Fx)(t) + (F_1x)(t)=f(t), k \in [1,N]\), we obtain the estimation
where
and
We shall rewrite inequality (46) in the following form
By virtue of the discrete analogue of the well-known Bellman–Gronwall lemma (see [13, Theorem 1.28]), from inequality (47) we get
Hence, the inequality (45) can be written as
Consequently, we can rewrite the estimation of the error (44) for problem k as the form
Substituting N for k and by (43), we obtain (42). This completes the proof of the theorem. \(\square \)
Remark 3
By virtue of the monotony and Lipschitz-continuous of the operator F and contractive of the operator \(F_1\), the perturbed nonlinear Fredholm integral equation of the second kind (27) can be reduced into the nonlinear Fredholm integral equations of the second kind (39) with a contractive operator via intermediate integral equations with contractive operators in new variables. Therefore, error estimates for approximate solutions of the perturbed nonlinear Fredholm integral equation of the second kind (27) based on the error estimates of the method of contractive mapping.
Remark 4
We shall now estimate the complexity of the proposed iterative algorithm (41). The procedure for calculating each value \((Fx)(t), (F_1x)(t)\) in the specified element x(t) is called an elementary operation. We shall call the number of elementary operations necessary to implement algorithm (41) is the volume of the calculations M(n, N). Successively analysing problems \(1, 2, \ldots , N\), it is easy to verify that \(M(n,N) \le (n+1)^{N+1}\).
Remark 5
To illustrate the effectiveness and convenience of the Parameter continuation method, we compare this method with Homotopy analysis method and Small parameter method. In the Homotopy analysis method [9, 21] and Small parameter method [16], the solution of the given equation can be expressed as a power series of parameter \(\varepsilon \). So, the operator is required higher order derivatives and the power series of parameter \(\varepsilon \) is required converges at \(\varepsilon = 1\). To estimate the error of approximate solutions, we must be estimated the derivatives of the operator. In Parameter continuation method, the operator is required Lipschitz-continuous and monotonic. The approximate solutions are found by using iterative processes, which are a hybrid of the method of contractive mapping and the parameter continuation method. The error estimates for approximate solutions based on the error estimates of the method of contractive mapping. Comparison with Homotopy analysis method and Small parameter method show that Parameter continuation method has two advantages that encourage us to use it. Firstly, the algorithm to find approximate solutions is an iterative algorithm. Furthermore, we can estimate the error of approximate solutions.
5 Illustrative Examples
In this section, to illustrate above our main results, two examples are presented. For calculating the results in each table, we use Maple v12.
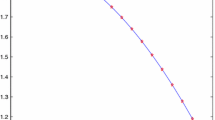
Example 1
Consider the following Fredholm integral equation
which has the exact solution \(x(t)= \text {sin}(t) + \text {cos}(t)\).
In this example, we have \(K(t,s,x(s)) = \text {cos}(t) \text {cos}(s) x(s) \) and \(f(t) = \text {sin}(t) + \left( 1+ \frac{\pi }{2} \right) \text {cos}(t)\). It is easy to verify that \(f(t) \in L^2[0,\pi ]\). For all \(t,s \in [0, \pi ]\), for all reals x, y we have
where \( \int \nolimits _a^b \int \nolimits _a^b {\left| {\varPhi }(t,s) \right| ^2\mathrm{d}s\mathrm{d}t}= \int \nolimits _0^{\pi } \int \nolimits _0^{\pi } {\text {cos}^2(t) \text {cos}^2(s) \mathrm{d}s\mathrm{d}t}=\frac{\pi ^2}{4} =L^2< \infty \);
and
Therefore, the functions f(t), K(t, s, x) satisfy the assumptions of the Theorem 3 and 4. By applying the iteration processes (13) with \(N=2\), we get
where \((G_1x)(t) = x(t)+ \frac{1}{2} \int \limits _0^{\pi }{\text {cos}(t) \text {cos}(s) x(s)\mathrm{d}s} = x^{(1)}(t)\). Taking \(n=20\) (the number of steps in each iteration scheme is the same and equals \(n=20\)), the approximate values and absolute errors in some points \(t \in [0,\pi ]\) are presented and compare results calculated by Homotopy analysis method with twenty terms in Table 1.
It is noted from the Table 1 that the results obtained by Parameter continuation method are as accurate as Homotopy analysis method for different points \(t \in [0,\pi ]\).
Remark 6
It follows from the error estimations (14) that for any given \(\delta \) we can find the number of iteration such that \(\Vert x(n,N)(t) - x(t) \Vert \le \delta \). In Example 1, if \(\delta = 1.02 \times 10^{-5}\), then the number of iteration is 3969 (the number of steps in each iteration scheme is the same and equals \(n=63\)).
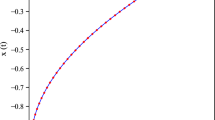
Example 2
Consider the following perturbed nonlinear Fredholm integral equation
\(0 \le t \le 1,\) which has the exact solution \(x(t)= \sqrt{t}\).
In this example, we have \(f(t) = \sqrt{t} + \frac{7+ 20 \text {sin}(1)+ 20 \text {cos}(1) }{15} t\) and \(K(t,s,x(s)) = \frac{9}{2}ts\; x(s)\), \(K_1(t,s,x(s)) = \frac{2}{3} t \text {cos}(x(s))\). It is easy to verify that \(f(t) \in L^2[0,1]\). For all \(t,s \in [0,1]\), for all reals x, y, we have
where \( \int \nolimits _a^b \int \nolimits _a^b {\left| {\varPhi }(t,s) \right| ^2\mathrm{d}s\mathrm{d}t}= \int \nolimits _0^1 \int \nolimits _0^1 {\frac{81}{4} t^2 s^2 \mathrm{d}s\mathrm{d}t}=\frac{9}{4} =L^2< \infty \);
and
Moreover,
where \(\int \limits _a^b \int \limits _a^b {\left| \varphi (t,s) \right| ^2\mathrm{d}s\mathrm{d}t} = \int \limits _0^1 \int \limits _0^1 {\frac{4}{9}t^2 \mathrm{d}s\mathrm{d}t} =\frac{4}{27}=B^2< \infty , B= \frac{2\sqrt{3}}{9} <1\).
Therefore, the functions f(t), K(t, s, x), \(K_1(t,s,x)\) satisfy the assumptions of the Theorem 5 and 6. By applying the iteration processes (40) with \(N = 2\), we obtain
where \((G_1x)(t) = x(t) + \frac{9}{4} \int \limits _0^1{ts x(s)\mathrm{d}s} = x^{(1)}(t)\) and \((G_2x^{(1)})(t) = x^{(1)}(t) + \frac{9}{4} \int \nolimits _0^1{ts (G^{-1}_1 x^{(1)})(s) \mathrm{d}s} = x^{(2)}(t)\). Table 2 presents approximate solutions and corresponding errors obtained by using the iteration processes (40) and the error estimations (42) with \(N = 2\) and \(n = 20, 30, 50\).
Remark 7
From the error estimations (42), we deduce that
where \(\alpha = max\left\{ {q, {\overline{q}}} \right\} , C(N)= \left[ \frac{1}{(1-q)(1-{\overline{q}} )^2} \frac{e^{qN}-1}{e^q - 1} + 1 \right] \Vert f(t) \Vert \).
From (50), it follows that for any given \(\delta \) we can find the number of iteration such that \(\Vert x(n,N)(t) - x(t) \Vert \le \delta \). In Example 2, if \(\delta = 0.009\) then the number of iteration is 29791 (the number of steps in each iteration scheme is the same and equals \(n=31\)).
6 Conclusions
In this paper, parameter continuation method has been successfully applied to solving nonlinear Fredholm integral equation of the second kind. Moreover, we propose parameter continuation method to solve perturbed nonlinear Fredholm integral equation of the second kind. The results show that parameter continuation method is a powerful mathematical tool, which can solve a large class of nonlinear Fredholm integral equations of the second kind. The method is a very efficient and convenient technique in finding approximate solutions of nonlinear Fredholm integral equations of the second kind and estimating the error of approximate solutions.
References
Bernstein, S.N.: Sur la généralisation du problème de Dirichlet. Math. Ann. 62, 253–271 (1906)
Chuong, N.M., Mamedov, Ya.D., Ninh, K.V.: Approximate solutions of operator equations. Science and Technics Publishing House, Ha Noi (1992)
Emamzadeh, M.J., Kajani, M.T.: Nonlinear Fredholm integral equation of the second kind with Quadrature methods. J. Math. Ext. 4, 51–58 (2010)
Eshkuvatov, Z.K., Hameed, H.H., Nik Long, N.M.A.: One dimensional nonlinear integral operator with Newton–Kantorovich method. J. King Saud. Univ. 28, 172–177 (2016)
Ezzati, R., Najafalizadeh, S.: Numerical solution of nonlinear Volterra–Fredholm integral equation by using Chebyshev polynomials. Math. Sci. 5(1), 1–12 (2011)
Gaponenko, Y.L.: The parameter-extension method for an equation of the second kind with a Lipschitz-continuous and monotonic operator. Comput. Maths. Math. Phys. 26(8), 1123–1131 (1986)
Hameed, H.H., Eshkuvatov, Z.K., Nik Long, N.M.A.: On the solution of multi-dimensional nonlinear integral equation with modified Newton method. J. Comput. Theor. Nanosci. 14(11), 5298–5303 (2017)
Leray, J., Schauder, J.: Topologie et équations fonctionnelles. Ann. Ec. Norm. Sup. 51, 45–78 (1934)
Liao, S.J.: Beyond Perturbation: Introduction to the Homotopy Analysis Method. Chapman & Hall/ CRC Press, Boca Raton (2003)
Nemati, S., Lima, P.M., Ordokhani, Y.: Numerical solution of a class of two-dimensional nonlinear Volterra integral equations using Legendre polynomials. J. Comput. Appl. Math. 242, 53–69 (2013)
Ninh, K.V.: Approximate solutions of the equation of a second kind with sum of two operators. In Proceedings of Institute of Mathematics and Mechanics of Azerbaijanian Academy of Science, vol. V(X), pp. 97–101 (1999)
Ninh, K.V.: A method of extending by parameter for approximate solutions of operator equations. Acta Math. Vietnam. 36(1), 119–127 (2011)
Phat, V.N.: Introduction to Mathematical Control Theory. Vietnam National University Press, Ha Noi (2001)
Porshokouhi, M.G., Ghanbari, B., Rahimi, B.: Numerical solution for nonlinear Fredholm integral equations by Newton–Kantorovich method and comparison with HPM and ADM. Int. J. Pure Appl. Sci. Technol. 3, 44–49 (2011)
Rahimkhani, P., Ordokhani, Y., Babolian, E.: Fractional-order Bernoulli functions and their applications in solving fractional Fredholem–Volterra integro-differential equations. Appl. Numer. Math. 122, 66–81 (2017)
Trenogin, V.A.: Functional Analysis. Nauka, Moscow (1980)
Trenogin, V.A.: Locally invertible operator and parameter continuation method. Funktsional. Anal. i Prilozhen. 30(2), 93–95 (1996)
Trenogin, V.A.: Global invertibility of nonlinear operator and the method of continuation with respect to a parameter. Dokl. Akad. Nauk. 350(4), 1–3 (1996)
Trenogin, V.A.: Invertibility of nonlinear operators and parameter continuation method (English summary). In: Ramm, A.G. (ed.) Spectral and Scattering Theory, pp. 189–197. Plenum Press, New York (1998)
Tricomi, F.G.: Integral Equations. Dover, New York (1982)
Vahdati, S., Abbas, Zulkifly, Ghasemi, M.: Application of Homotopy Analysis method to Fredholm and Volterra integral equations. Math. Sci. 4, 267–282 (2010)
Vetekha, V.G.: Parameter continuation method for ordinary differential equations. Proc Second ISAAC Congr. 1, 737–742 (2000)
Wazwaz, A.M.: Linear and Nonlinear Integral Equations. Springer, Berlin (2011)
Acknowledgements
The authors wish to express their sincere thanks to the Editor-in-Chief and reviewers for the insightful comments and useful suggestions that have helped improve the paper significantly.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Ali Hassan Mohamed Murid.
This research is funded by Vietnam National Foundation for Science and Technology Development (NAFOSTED) under Grant No. 101.92.2014.51.
Rights and permissions
About this article

Cite this article
Thanh Binh, N., Van Ninh, K. Parameter Continuation Method for Solving Nonlinear Fredholm Integral Equations of the Second Kind. Bull. Malays. Math. Sci. Soc. 42, 3379–3407 (2019). https://doi.org/10.1007/s40840-018-0700-3
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-018-0700-3