
Abstract
This paper deals with a new development of a swash-plate hydraulic pump. It is particularly designed to aim its usage in applications where environmental impacts should be concerned. Thus, the pump is based on not mineral-based oil but simple tap water. The Electro-Hydraulic Actuator (EHA), a linear motion generator operated by an electric motor installed to the proposed pump, can be attractive and expandable to small-to-medium pressure applications. Water is clean and safe, and the size of EHA is relatively small. New design features of the pump including the no-shoe retainer, the inclination angle adjustment screw, the rotating cylinder block, and the simple assembly structure enabled EHA. The pump was designed to have its static pressure of 1.4 MPa and the volumetric flow rate of 10 × 103 mm3/s. To verify its performance, a series of experiments were constructed, and the maximum volumetric flow rate and pressure were found as 2935.87 mm3/s and 1.9 MPa, respectively. The maximum velocity of the actuator stroke was 9.35 mm/s. The EHA is controlled directly by the electric motor, and so a directional valve is not necessary. It is concluded the pump can be successfully used in small-to-medium pressure applications.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Increasing environmental awareness of operating hydrocarbon based fluids (e.g., oils) and concerns on the pollution due to working fluids, the water hydraulics, which employs just tap water, can be selected as a sustainable alternative in fluid power transmission [1]. In modern hydraulic applications, oils (such as mineral oil) have been the dominant liquids to transmit the power. Oil-based hydraulic systems have superior performances in position and force control. Other advantages of oil-based hydraulics are corrosion resistance, high lubrication, low freezing temperature, and so forth. However, petroleum or chemical based hydraulic fluids pose environmental hazards, because most of hydraulic systems eventually leak. In some cases, ruptured hydraulic lines release significant volumes of fluid into the environment. Water hydraulics can accomplish the same work as traditional systems, without worrying about the environmental impacts associated with oil-based systems. When the system leaks the water, it can be simply swiped. For the mentioned reasons, particularly in food and health-care industries, water hydraulics is an attractive alternative to eliminate contamination [1]. Water is relatively clean and cheap compared to conventional oil. Typical hydraulic systems are designed to use just tap water, and so the reservoir can be filled with less efforts, when its volume becomes lower, because clean water is readily available in most of modern facilities. Water does not deplete as water is naturally recycled through the eco-system. Water hydraulics is a very efficient way to transmit fluid power; water is virtually incompressible with no energy loss attributable to fluid compression. When it comes to the fire that the conventional oil fluid catches often, environmentally adverse effects become more concerned. Water hydraulics is naturally fire proof, because water is truly non-flammable. Water hydraulics can be used even in below freezing applications, for environmentally safe additives can significantly lower the freezing point.
Among downsides of water hydraulics, the corrosion is one of major issues. Water causes corrosion in the metallic pipes and components due to dissolved gases in the water, e.g. oxygen, chlorine, carbon dioxide. High chlorine content in water can corrode even stainless steel. Due to the presence of micro-organisms in the water, microbial-induced corrosion adds further problems. This leads to the use of more expensive corrosion resistance materials and corrosion inhibiting chemicals, which can raise the costs of water hydraulic systems. Water has the low viscosity relatively to the oil. The low viscosity brings about a design challenge in terms of sealing, because the fluid membrane is not easily formed due to low viscosity, and this property leads to poor lubrication as well. Water freezes at much higher temperature (0 °C) than that of mineral oil. As water freezes, its volume expands by about 9% and this can cause severe damage in a water hydraulic system. Of course, water can be heated up or environmentally friendly antifreeze solutions can be used. In most of modern engineering applications (medium to small size mostly), therefore, electric motors have replaced water hydraulic power units due to disadvantages mentioned in the above.
Electric motors can easily convert electrical energy into torque and speed. In general, they are relatively easy to control with a balanced speed on the condition that reduction gears and sensors are equipped with. However, there are downsides of electric motors. A specific mechanical coupler is needed, when the power should be transmitted from the motor, or the motor should be installed at the location of motions. Thus, mechanical accessorial parts including gears, connecting rods, and pulleys are to be thoroughly designed to operate with electric motors. This kind of systems can easily get complicated, and so the maintenance becomes difficult. The motor typically requires a reduction gear set, which is often bulky and expensive particularly in case of the harmonic gear set, for its rotational speed is relatively fast. When an impact load is exerted to the motor, the gear set can be damaged, or the load and damage can be transmitted to the motor [2]. High-horsepower motors in applications at a low load factor result in costly electrical demand charges, i.e., a high cost per hour of operation. This low load factor operation can be seen in many applications, because a small electric motor is not effectively working for large loads due to its low power density. And electric motors are vulnerable to excessive heat and humidity, in general.
A drive system with hydraulics and electric motors, called an Electro-Hydraulic Actuator (EHA), can enable higher power density, and lower installation/operational costs. EHAs are particularly used in applications where hydraulics power transmission is the only technique that can be used. One area where oil-based EHAs have been exclusively used for decades is Aerospace [3,4,5,6]. Because EHA’s power density (power to weight and volume to weight) is high, EHAs have been used to extend an aircraft’s control surface into a high velocity air stream [3, 7]. While Shang et al. [7] proposed an energy recovery EHA as a solution for the EHA’s heating problem [4, 7], water as a working fluid can dramatically shift the design conditions.
When the fluid power technology using water for power transmission was utilized in 18th century, it was mainly to transmit large power like workshop machinery, cranes, lifts, and cotton bailing machines [1]. The word “hydraulic” was initially originated from an ancient word of a water organ. Recent technologies in design, analysis, and controls make the water hydraulics available in more applications than before. In the field of ceramics, engineering plastics, and the advanced surface treatment, fundamental cutting-edge technologies have been developed to compensate the downsides of the water hydraulics: corrosion, poor lubrication, leakage, deterioration of materials, and so forth [8, 9]. Even with newly developed technologies, water hydraulics cannot replace conventional oil-based hydraulics right away. Instead, to promote its usage, water hydraulics can exploit the niche area between conventional pneumatics (below than 0.7 MPa) and oil hydraulics (greater than 7 MPa) [10, 11]. This low-pressure water hydraulics is a relatively new branch of fluid power technologies that have not been extensively studied so far [10, 12]. Recently, a mineral oil-free hydraulic fluid, mainly water with additives, is studied for a novel, energy-efficient water-based hydraulic system [13]. Medium-to-small sized applications can employ water hydraulic pumps as a driving power source with a new capability and design feature, with the EHA in mind. For example, water hydraulics can be extended to children toys, educational kits, daily electronic consumer appliances, etc. In aforementioned areas of usage, spills or leakages of water is not a problem unlike the oil-based fluid. Thus, the system has almost zero environmental impacts. The water hydraulic components and systems, development, best practice of design, and industrial applications of water hydraulics were discussed by Conrad et al. [14, 15] One of modern water hydraulic technologies is a swash-plate pump/motor. Its pistons—the objects for the power transmission—are in parallel with a driven/driving rotor. The modeling of swash plate pumps was studied where the dynamic performance of swash plate pumps was analyzed [16]. And mechanical properties and vibrations of pumps were studied. These are mainly for a conventional swash plate pump [17]. In Lee et al. [18], a micro EHA was employed in a robotic arm. This small actuator with a 4.5 W motor can handle a high payload up to 5 kg (high power density). However, this EHA [18] is oil-based hydraulics made of stainless steel.
The low-pressure water hydraulics essentially makes the swash-plate pump smaller than conventional ones. Small pumps require a new design with appropriate material choice. For its manufacturability and applicability with a high volume, using plastic materials is advantageous. Water can interact with metals (even with stainless steels in aggressive and long-term conditions) leading to corrosion eventually. Special surface treatments to prevent corrosion increase the overall cost, and the treatment may degrade over time. On the contrary, plastic material types are chemically stable in water. Advanced plastic materials associated with water have superior surface properties (low water absorption) [19]. Also, plastic materials can be a good choice for its easy fabrication, which will yield an overall low cost. This is particularly important in that low-cost industrial robots or collaborative robots are rising in highly interactive tasks with humans where a clean environment is one of crucial factors [20].
In this paper, a new type of a water hydraulic swash plate pump for the low-pressure water hydraulics is proposed. It is a small-sized swash plate axial piston pump made of engineering plastics (Polycarbonate, Polyoxymethylene, etc.). The Polyether ether ketone (PEEK) material is used for the retainer and the kidney slot where parts wear well. The overall design is in a simple concept: a ball-joint retainer that grasps pistons, and pistons with no shoe, particularly. The design concept was made to be suitable for medium-to-small applications. Another distinguished feature is its two-way actuating capability with no valve required. The driving direction of an electric motor rotating the pump’s shaft is the pumping direction. Section 2 describes the main configuration of the proposed pump. In the section, the newly designed pump is compared with a conventional oil-based swash plate pump. In Sect. 3, calculations for the major design parameters of the system are explained. Experimental results are provided and discussed in Sect. 4. And concluding remarks and future work are given in Sect. 5.
2 Water hydraulic pump configuration
Figure 1 shows the assembled pump as a complete device that is ready to use. The bottom insets show the core parts without the pump housing. The cylindrical housing is disassembled from the core unit, which is the assembly of the cylinder block, pistons, retainer, swash plate, rotating shaft, and so forth. The design features of this new type pump include a retainer that mechanically couples piston rods by ball-joints, a variable inclination adjustment screw of the swash-plate that changes the displacements of axial pistons by a simple screw, a rotating cylinder block for the bidirectional capability without a valve, and a simple assembly structure for the small size. The pump mainly consists of a drive shaft, cylinder block, piston assembly, retainer, swash plate, pump housing with kidney slots, etc. For this particular type of the pump, nine pistons are arranged in the cylinder block in a circular array at equal intervals around the center axis. The overall dimension of the pump is ~ 40 mm in diameter and ~ 50 mm in length.

Fully developed water swash plate pump (top) and disassembled pump (bottom)
Each piston is mechanically constrained by a ball-and-socket joint through the connecting rod to the retainer which is rotating with pistons when operating. In order to make the pump as a lightweight (light duty in a small dimension), parts are made of plastics, which are relatively more flexible than metals. To overcome this disadvantage in its material, a new retainer securely connects nine pistons through each respective joint, while a conventional retainer is pushed by springs from the cylinder block and piston shoes are in contact with the swash plate. Due to the low mechanical strength of plastic materials, the conventional design of the retainer is not appropriate. Small parts are not easy to fabricate with plastics, and even plastic parts will break so easily. Figure 2 shows the comparison of the retainer between the conventional type from Takako’s micro pump [21] and the new design. As shown, the conventional type (top insets) shows a separate retainer and shoe per piston, but the new design (bottom insets) has only the retainer as one part. To overcome the weak strength of the plastics, the retainer was designed as a ring plate (which constraints the pistons to the plate as a whole), so it can endure better the pulling forces which retract the pistons from the holes in the cylinder block. The retainer itself contacts the swash plate without a shoe, and so a few parts are eliminated in the final design, enabling its cost-saving fabrication. Two groove lines under the retainer reduces the friction to the swash plate. The retainer is held by the swash plate, and the contact condition of piston rods becomes reliable. Thus, only one essential frictional contact is constructed in this design configuration.

Comparison between the conventional mineral oil-based swash plate pump (top) and the new design (bottom) of a swash plate pump for water hydraulics
The pumping flow can be varied by modifying the travel distance of axial pistons. Pistons are in reciprocating motions made by the swash-plate angle, which is simply adjusted by a screw that is located and rotated from the outside of the drive shaft support housing. The swash plate is connected by a hinge to the drive shaft. Also, the cylinder block is rotating with pistons, and this enables the pump to be actuated in two opposite directions without a valve. A directional valve which can be expensive considering its overall cost becomes unnecessary. The design features mentioned in the above are coordinated for the compact design of the swash plate pump in low-pressure water hydraulics applications mentioned in the “Introduction” section.
The basic working principle of the pump proposed in this paper can be understood well by conventional axial piston swash-plate pumps [16, 17, 22,23,24,25,26,27,28]. The general configuration of the pump is seen similar to conventional swash-plate pumps as shown in Fig. 3, which illustrates how the axial piston pump can create the flow. In the top inset of Fig. 4, the swash plate is not engaged as it is in a flat position. In this position, the pump is not operational. In the bottom inset, the plate is set obliquely to the drive shaft.

Cut-view of the 3D design of the swash axial piston pump

Swash plate crank shaft diagram: the swash plate not engaged (top) and engaged (bottom)
3 Flow rate and pressure calculations
Figure 4 shows the mechanism of the swash-plate, crank shaft, and piston. When the crank shaft rotates, the pistons rotate as well around the shaft axis, and the swash plate set obliquely is playing a role of a cam that pushes and pulls the piston axially. In other words, the pistons in parallel with the shaft reciprocate due to the oblique plate and retainer in and out of the cylinder block. Thus, nine pistons push and pull water periodically in the cylinder block, when the swash plate rotates in a skew angle.
To calculate the pump performance, the moving mechanism of the pistons is studied. The coordinate system XYZ in Fig. 4 was established to study the pistons motions, which determine key design factors including the flow rate and transmitting power. In this study, the piston is assumed as a rigid body, and small jiggling due to joints is neglected. Thus, the piston location can be defined from its root, the ball-and-socket joint qi, which connects the piston to the swash plate. The ball-and-socket joint location qi is determined in a fixed coordinate system as
where r is the distance between the center of the cylinder block and the piston center, \(\phi\) is the swash plate angle, \(\omega\) is the angular velocity of the shaft, and t is time. And the velocity of the piston can be derived from Eq. (1) by taking its derivative as
We are only interested in the piston’s vertical motion in the cylinder block, and its root-mean-square value for its averaged performance can be written as
Consider nine pistons in one pump, and then the flow rate can be calculated as
where d is the piston diameter. To calculate the power transmitted from the fluid and its efficiency, the pressure P created by the pump should be calculated as well. For P exerted on the piston, the piston thrust force F is considered, having the force equilibrium relation as
The force F can be calculated from the law of conservation of energy. Suppose the work of the input torque Tm is transmitted to the piston and its friction at the plate (the viscous friction coefficient is \(\mu\)). While the shaft is rotated half a cycle, the piston is pushed from the bottom to the top dead center, traveling the length L.
, where
Thus, the force F and the pressure P can be written as
and
4 Experimental results
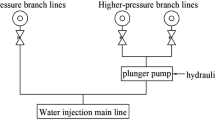
The experiment set-up to verify the pump performance is shown as a schematic diagram in Fig. 5. The design parameters of the pump used in the experiment are given as follows.

Schematic diagram of the pump experiment set-up
To obtain the flow rate, the potentiometer was used to measure the position of the linear cylinder, which diameter is 20 mm. The pump is rotated by a DC motor (24V, 42.3W), and the double acting water hydraulic linear actuator is connected to the pump. The linear actuator rod is basically pushed back and forth by the water fluid. To measure the volumetric flow rate in mm3/s, a linear position sensor was coupled with the actuator rod, and its motion is synchronized. The water flow that makes the move in the actuator became visual by the position sensor, which directly reads the motion. And the position measurements are back calculated for the flow rate. As shown in the diagram, the pump rotates two ways: clockwise and counterclockwise directions. Because of this advantage, a directional valve was not necessary. Also, in the water loop, no reservoir (or water tank) is shown, for the water is very incompressible. The pressure gauge is attached to the retraction side of the loop. Therefore, the maximum pressure is expected, when the actuator pulls the rod. Figure 6 shows the actual experimental setup of the diagram explained earlier. An Arduino micro-controller is connected to activate the set and record the measurements.

Experimental set-up
The experiments were carried out several times, and four rounds of executions were recorded. Figure 7 shows the linear actuator rod displacement versus time, when the rod is retracted (left) and thrusted (right). The time in data was offset to start the motion similarly. As shown, the rod is moved ~ 100 mm of the total displacement in about 10 s. The average speed of the rod is 9.35 mm/s and 7.75 mm/s, when the rod is retracted and thrusted, respectively. The flow rate can be calculated by plugging the diameter value of the actuator cylinder, multiplied by the rod velocity. The average flow rate was calculated as 2935.87 mm3/s and 2433.64 mm3/s, when the rod is retracted and thrusted, respectively. With motor’s rated speed of rotation, the displacement increases and decreases with an almost constant velocity (and this implies a smooth water flow during steady-state actuation). Multiple experiments show the pump works in a same pattern. But if a different electrical motor is attached, the pump performance will be changed.

Actuator rod displacement (left: retract, right: thrust)
On the contrary to the displacement, the experimental cases shown in Fig. 8 are relatively not comparable in pressure measurements, still being in a similar pattern. The pressure ranges from 0 to ~ 1.9 MPa (left in Fig. 8), when the rod is retracted, and from ~ 0.7 to 0 MPa (right in Fig. 8) ranged, when thrusted. Particularly, high pressure measurements are relatively disagreed. And the maximum pressure is approximately 1 MPa higher for the retraction than the pressure for the thrust. During the retract motion, a smaller pressure area on the piston is resisted to generate the same forces than the thrust motion, and thus the pressure can be higher to generate the required piston force. And the pressure difference can be due to the location of the pressure gauge, which is installed in the top loop of the linear actuator as well. Also, the difference might stem from the directional fixed frictions in the cylinder.

Pressure measurements (left: retract, right: thrust)
Based on the chosen system properties, the theoretical static pressure of 1.4 MPa (with a viscous friction coefficient of 0.15) and the volumetric flow rate of 10 × 103 mm3/s were calculated from Eqs. (4 and 9). The maximum pressure was observed higher than 1.4 MPa, but the flow rate was lower than 10 × 103 mm3/s. The experimental flow rate can be lower, because a flow resistance in the experimental loop should have been considered for the calculations.
In Fig. 9, the flow rate is associated with the pressure measurement records (in Figs. 7 and 8) from multiple experiments. The discrete measure points were fitted to a curve by a quadratic function. The pattern is a typical inversely proportional relationship between the flow rate Q and pressure P. As explained earlier, the maximum pressure at the retraction is about 1 MPa higher than that of the thrust. Very few measuring points between 500 and 2500 mm3/s are observed, because the pump was operated almost discretely, being on and off.

Flow rate by the swash plate piston pump with a theoretical mean (left: retract, right: thrust)
5 Conclusions
The water, which is readily available in most places, is clean and safe. To take advantage of water, the new pump was developed particularly for the application of the water working fluid to minimize adverse impacts to the environment unlike conventional oil-run hydraulic pumps. The water hydraulics can be further extended to medium-to-small pressure applications in the form of the Electro-Hydraulic Actuator (EHA): a swash-plate axial pump with an electrical motor installed. For the EHA, the pump, which was made of modern engineering plastics, was designed in a relatively small size (~ 40 mm in diameter and ~ 50 mm in length). The EHA was enabled by new design features of the pump: the no-shoe retainer, the inclination angle adjustment screw, the rotating cylinder block, the simple assembly structure, and so forth.
A pump experiment set-up was set up to evaluate the pump performance: fluid flow rate and charging pressure. In the set-up, a water hydraulic linear actuator was tested by connecting to EHA. The position of the actuator rod and pressure were synchronously measured. The maximum volumetric flow rate and pressure were 2935.87 mm3/s and 1.9 MPa, respectively. The maximum velocity of the actuator stroke was 9.35 mm/s. The relationship between the flow rate and pressure was determined inversely proportional as expected. The pressure at the actuator’s retraction was ~ 1 MPa higher than the pressure at its thrust. This was because the pressure gauge was installed at the retraction leg, and so the pressure goes up when the fluid comes into the gauge side. In the set-up, no directional valve was necessary, because the EHA rod direction was directly controlled by the electric motor. Overall performance depends on the motor as well. Also, no reservoir (or water tank) was required, and so the fluid circuit became simple.
Although the speed of actuation is not comparable to electric motors, the high power density with smooth safe motions is a merit for various applications (medical devices, children toys or food processing equipment, in particular). In the future, an analytic approach with a full version of fluid dynamics is needed for a better design, and the higher pressure design up to 7 MPa is left for the next work. The real-time efficiency is left for future work. The efficiency requires measuring the input power as well. At this time of experiments, only the pump capacity was evaluated whether the pump design can be used for small-to-medium pressure (0.7 ~ 7.0 MPa) applications, and the pump has shown its capability meeting the pressure range. Also, the long-term reliability of the pump operation should be studied including its wear and leakage characteristics.
References
Bossert VC, Fisher JD (2016) Water: the next generation of green hydraulics. In: 21st World Dredging Congress 2016 (WODCON XXI).
Ottewill JR, Orkisz M (2013) Condition monitoring of gearboxes using synchronously averaged electric motor signals. Mechan Syst Signal Process 38(2):482–498.
Van Den Bossche D (2006) The A380 flight control electrohydrostatic actuators, achievements and lessons learnt. In: 25th international congress of the aeronautical sciences, pp. 1–8.
Alle N, Hiremath SS, Makaram S, Subramaniam K, Talukdar A (2016) Review on electro hydrostatic actuator for flight control. Int J Fluid Power 17(2):125–145.
Navatha A., Bellad K, Hiremath SS, Karunanidhi S (2016) Dynamic analysis of electro hydrostatic actuation system. Proced Technol 25:1289–1296.
Li J, Yu Z, Huang Y, Li Z (2016) A review of electromechanical actuation system for more electric aircraft. In: 2016 IEEE International Conference on Aircraft Utility Systems (AUS), pp. 490–497.
Shang Y, Li X, Wu S, Pan Q, Huang L, Qian H, Zongxia J (2019) A Novel Electro Hydrostatic actuator system with energy recovery module for more electric aircraft. In: IEEE Transactions on Industrial Electronics.
Dong W, Zhuangyun L, Yuquan Z (2001) Study of the key problems in a water hydraulic piston pump and its applications. Ind Lubr Tribol 53(5):211–216.
Huayong Y, Jian Y, Hua Z (2003) Research on materials of piston and cylinder of water hydraulic pump. Ind Lubr Tribol 55(1):38–43.
Krutz GW, Chua PS (2004) Water hydraulics—theory and applications 2004. In: Workshop on Water Hydraulics, Agricultural Equipment Technology Conference (AETC’04), pp. 8–10.
Gary WK, Patrick SKC (2004) Water hydraulics-theory and applications. In: Workshop on Water Hydraulics, Agricultural Equipment Technology Conference (AETC\’04), Louisville, pp. 1–33.
Kunttu P, Koskinen KT, Vilenius M (1999) Low pressure water hydraulics-state of the art. In: Proceedings of 6th Scandinavian International Conference on Fluid Power, SICFP99, Tampere, Finland, pp. 67–75.
Brecher C, Jasper D, Fey M (2017) Analysis of new, energy-efficient hydraulic unit for machine tools. Int J Precis Eng Manuf-Green Technol 4:5–11.
Conrad F, Pobedza J, Sobczyk A, Stecki JS (2003) Experimental-based modelling and simulation of water hydraulic mechatronics test facilities for motion control and operation in environmental sensitive applications areas. In: 1st Intl Conference on Computational Methods in Fluid Power Technology-Methods for Solving practical problems in Design and Control.
Conrad F, Hilbrecht B, Jepsen H (2000) Design of low-pressure tap water hydraulic systems for various industrial applications, SAE Technical Paper 2000-01-2614. Wisconsin: International Off-Highway and Powerplant Congress and Exposition, Milwaukee.
Zuti Z, Shuping C, Xiaohui L, Yuquan Z, Weijie S (2016) Design and research on the new type water hydraulic Axis piston pump. J Press Vessel Technol 138(3):031203.
Chen HX, Chua PS, Lim GH (2006) Dynamic vibration analysis of a swash-plate type water hydraulic motor. Mech Mach Theory 41(5):487–504.
Lee YK, Lee SJ (2013) A bio-mimetic robot arm actuated by micro EHA. In: 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) IEEE, pp. 39–44.
Maddah HA (2016) Polypropylene as a promising plastic: a review. Am J Polym Sci 6(1):1–11.
Pham A., Ahn H (2018) High precision reducers for industrial robots Driving 4th Industrial Revolution: state of arts, analysis, design, performance evaluation and perspective. Int J Precis Eng Manuf-Green Technol 5:519–533.
Kosodo H (2012) Development of micro pump and micro-HST for hydraulics. JFPS Int J Fluid Power Syst 5(1): 6–10.
Luo X, Niu Z, Shi Z, Hu J (2011) Analysis and design of an axial piston water-pump with piston valve. J Mech Sci Technol 25(2):371.
Khalil MB, Svoboda J, Bhat RB (2004) Modeling of swash plate axial piston pumps with conical cylinder blocks. ASME J Mech Des 126(1):196–200.
Kaliafetis P, Costopoulos T (1994) Modeling and simulation of an axial piston variable displacement pump with pressure control. Mech Mach Theory 30(4):599–612.
Manring ND, Johnson RE (1996) Modeling and designing a variable-displacement open-loop pump. J Dyn Syst Meas Control 118:267–272.
Das J, Sujit K, Mishra SK, Kumar A., Kumar N, Paswan R (2014) Modern advancement of hydraulic motor: a review. Appl Mech Mater 592:2179–2183.
Chen HX, Chua PS, Lim GH (2007) Vibration analysis with lifting scheme and generalized cross validation in fault diagnosis of water hydraulic system. J Sound Vibr 301(3–5):458–480.
Burrows CR (2002) Some challenges facing fluid power technology, opportunities for international collaboration and progress to date. In: Proceedings of the JFPS International Symposium on Fluid Power , pp 107–112.
Acknowledgements
The authors would like to thank Mr. Joe Pfaff for his insightful comments and suggestions. The paper was supported by the research grant of the University of Suwon in 2018.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lim, DW., Lee, YK. Design of the swash-plate water hydraulic pump for environment-friendly actuator systems. Int. J. of Precis. Eng. and Manuf.-Green Tech. 8, 1587–1596 (2021). https://doi.org/10.1007/s40684-020-00236-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40684-020-00236-0