
Abstract
Cleaning dirty spaces is a very important task for human beings to maintain their quality of life. Recently, many high-rise buildings have been constructed, and their façades are easily contaminated by dust and pollution, especially in Asian countries such as China and Korea. Human workers are cleaning the façades, which are mostly made of glass, by hanging on to a gondola or rope, which entails spending a long time in midair, and this is dangerous work due to the risk of falling. To help humans avoid this dangerous and hard work, many researchers have tried to develop unmanned façade-cleaning robots; however, there are many issues to be solved before cleaning robots become efficient and popular. In this survey, we investigate and analyze robots used for cleaning building façades and glass. The robot are classified by types of climbing and attaching mechanisms, and their cleaning methods, mobility, and obstacle-overcoming performances are analyzed. In this paper, we also include for discussion some suggestions for making the robots more effective in real environments, and we expect that our work can provide reference to assist in the development of façade-cleaning robots for the real world.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Green technology leads to a better quality of life for humans. Humans try to improve their quality of life by observing their surrounding environment. Cleaning is a representative example of a process that improves the quality of life by preventing contamination and giving rise a feeling of well-being. Recently, the need for a clean life has led to the development of more technology, such as room cleaning robots [1, 2] and air purifying machines [3].
Contamination of a building’s façade is a significant problem worldwide, especially in Asian countries such as Korea and China. As industries are developed, more pollution is generated, dirtying building façades or glass. Human workers clean building façades manually by using suspended gondolas or ropes, which involves difficult and dangerous work. In Korea, an investigation indicates that 15 workers lost their lives during façade-cleaning work in 2016 [4]. It is also very tedious work, as it takes a long time to clean the façade of a large building.
Façade cleaning is a big market, estimated at 10 billion USD [5, 6]Footnote 1 in 2017, with potential for rapid increase. As the number of high-rise buildings has increased, the market is also increased, and high-rise buildings are being constructed worldwide, with an especially dramatic increase in construction in China [5]. This increasing trend will undoubtedly continue in the near future.
Many researchers have suggested different types of façade-cleaning robots. From scientific research, such as bio-inspired robots, to commercially available products, researchers have tried to penetrate the façade-cleaning robot market for the last few decades. In due course, the efforts of researchers will open up the façade-cleaning market to commercial robotic products, and it is expected that robots can fully replace humans, so they no longer have to do this hard and dangerous work.
The authors investigated façade-cleaning robots and analyzed their climbing mechanisms, cleaning methods, and application issues. Typically, the façade-cleaning robot consists of a wall-climbing device, and a cleaning device. The wall-climbing device can be classified by the locomotion and attachment mechanisms. Investigation methods and classification results on recently developed façade-cleaning robots are given in Sect. 2, while Sect. 3 presents the results gained from investigating the operating environments facing commercialized robots on the buildings in Gangnam, Korea. Sections 4–6 describe the investigation and analysis of robots based on their ability to overcome obstacles, and on their cleaning performance, mobility, and maneuverability, with analysis on recently developed robots presented in Sect. 7. Finally, Sect. 8 includes discussion and conclusion, and we identify the challenging issues that must be overcome for façade-cleaning robots to widen their applicability.
2 Investigation of Façade-Cleaning Robots and Classification
Façade-cleaning robots developed by researchers in the last few decades are summarized in Table 1 [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62]. Both commercially available robots and research prototypes are included. Wall-climbing robots not currently used for cleaning purposes but with payload capacity on glass surfaces are included, in recognition of their potential availability as robots.
The investigated robots are classified by two characteristics: locomotion and attachment mechanisms, as shown in Table 1. For locomotion, we classify the robots into four categories: track, wheel, walking, and hybrid types. Many commercially available façade-cleaning robots use either tracked or hybrid types of locomotion, and several examples are also found that use the walking style. For attachment mechanisms, four categories are defined: vacuum suction, vortex suction/magnetic adhesion, wire/rope, and bio-inspired types. For the bio-inspired attachment mechanisms, there is currently no commercial product example, but we include the mechanism as a potential future possibility. In all, sixteen categories are used to define the classifications of façade-cleaning robots; the types with functional indices are shown in Sect. 4, after first reviewing building environmental conditions in Sect. 3.
3 Environmental Investigation
To define the requirements for the robots’ functionality, investigating the environmental conditions in which they would operate is very important. As the numbers of high-rise buildings rapidly increase [6], so does their variation. To develop an efficient façade-cleaning robot, the robot must be able to clean all different types of buildings effectively.
We investigated high-rise buildings in Gangnam, Korea. Gangnam has many high-rise buildings, and they have many different types of façades, such as flat glass surface, rounded glass surface, obstacles, and inverted-sloped surface, as shown in Fig. 1. To collate detailed building information, we used “Daum Road View [63] ”, and measured the data based on these images: we also visited Gangnam sites to ground-truth the reliability of the data collected from the website. We investigated all buildings used as offices and retail premises, 276 in all, in Dec. 2017. We excluded apartments, as we found that they are not easy to define completely, in terms of their shapes and surfaces.

Examples of high-rise buildings in Gangnam. a Flat glass surface, b rounded glass surface, c 100-mm obstacle with signs, and d glass surface with inverse slope
Table 2 provides the building data based on façade materials, existence of signs, shape of the bottom and tops, and the size of steps. As we expected, most large surfaces of high-rise building are composed of glass with zinc panels, indicating that cleaning glass surfaces is the most important aspect of the façade-cleaning mission. For the shape of bottoms and tops, many buildings have retail premises at ground level while most building tops are simply flat. In addition, many buildings have advertising signs on their facades, extending across the second to fifth floors.
One of the most important environmental conditions for robot design is the profile variation, or “step size,” of buildings, which is shown in the bottom rows of Table 2. Half of the buildings include steps less than 100 mm on their vertical surfaces, including their signs, while the accumulated numbers are 88% for less than 400-mm steps and 96% for less than 500-mm steps. Therefore, the ability to overcome high obstacles is required for a robot cleaner to clean most high-rise buildings.
Based on this investigation of their operating environment, we concluded that the basic attributes a robot would need, to effectively clean façades, could be summarized as follows: (a) good cleaning performance (CP) for glass surfaces, (b) good “obstacle overcoming capability” (OOC), (c) high locomotion speed for fast cleaning, and (d) a high level of maneuverability, to assist cleaning speed and also to facilitate ease of installation and retrieval. We then applied these criteria to the robots inventoried in Sect. 2.
4 Obstacle Overcoming Capability/Cleaning Performance
The first two criteria to determine the performance of façade-cleaning robots (including some wall-climbing robots with potential for use as cleaning robots) are the obstacle overcoming capability (OOC) and cleaning performance (CP). As discussed earlier, the OOC is necessary, while CP is definitely the main function of a façade-cleaning robots. To analyze performance, we defined the levels of each criterion, as shown Table 3. The OOC is ranked according to five levels of obstacle height, and the CP is classed according to the cleaning principles applied.
Figure 2 shows the analysis results for the robots identified in Table 1, and as shown in Fig. 2, many of these just focused on flat surface climbing ability and did not have any cleaning devices. For the OOC, the multi-track robot, which comprises vacuum suction attachment and with tracked locomotion, has the highest score, by designing the tracks with multi-linked mechanism. The vacuum suction functioned robots, denoted in red, have relatively high OOC compared to the other robots, regardless of their locomotion method.

Obstacle overcoming capability (OOC) and the cleaning performance (CP) of façade-cleaning robots
For the CP, there are some successful robot examples that use vacuum suction and wire/rope attachment mechanisms. Mostly, vortex suction robots use the dry clean or diatomite methods, and the wire/rope robots use water cleaning. Some examples in the right side of Fig. 2 use water cleaning with a squeezing mechanism to maximize the CP, while having limited OOC. The IPC Eagle [47] robot with wire/rope attachment was seen as a reliable solution, using the water cleaning method and with level one OOC, as shown in Fig. 2.
It is important to note that none of the robots examined showed both high OOC with high CP, and the authors believe this indicates that more design work is required to design a popular robotic solution that exhibits both high OOC and CP simultaneously.
5 Cleaning Speed Analysis
One important characteristic of façade-cleaning robots is their agility. We analyzed the agility using two indices, absolute speed and relative speed based on body length, and the results are shown in Fig. 3. As shown, the absolute speed and relative speed show a positive proportional relation. Generally, the vortex suction/magnet type is faster in both absolute and relative terms. The ROPERIDE [45] with wire/rope attachment and Kotay et al. [41]. with translational locomotion, show the highest absolute speed over all climbing robots. For relative speed, there are some good examples from the bio-inspired attachment types, with Waalbot [57] showing high agility by utilizing a wheel-leg mechanism. Combot [31] with magnetic track is also an important example of high speed movement on a vertical surface.

Climbing speed of façade-cleaning robots in terms of absolute speed (cm/s) and relative speed (absolute speed/body length)
6 Maneuverability
The steering ability of a façade-cleaning robot is important for fast cleaning, as is ease of installation and retrieval. Typically, climbing robot design is focused on vertical climbing ability, with steering ability thought less important: nonetheless, our work indicates that steering ability, that is, maneuverability, is a very crucial aspect in the development of an efficient façade-cleaning robot.
Figure 4 portrays the maneuverability of façade-cleaning robots. It is important to note that the wire/rope suspension type robots (represented by cyan colors) do not have steering ability, although they have achieved high performances in the previous analyses of OOC, CP, and speed. Discounting wire/rope suspension type robots, no significant difference has been found in the steering ability exhibited by robots using different locomotion and attachment methods. The track and wheel robots all have relatively high maneuverability by skid steering compared with the wire/rope functioned robots.

Maneuverability of façade-cleaning robots
7 Recent Directions for Façade-Cleaning Robots
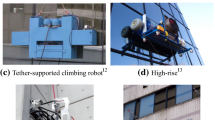
To advance their dominance in the façade-cleaning robot market, many companies and laboratories have recently been trying to develop optimal solutions. Figure 5 shows examples of recently released commercial products that are mostly still at the prototype stage. Bisoh in Japan has suggested a solution using a rail system installed on the building to facilitate stable movement of the robot on the façade [64] (Fig. 5a), and also developed a specialized hub system, to insert and retrieve the robot from the guide rail (Fig. 5b). Korean researchers proposed a similar cleaning system concept a few years ago [65]. They also conducted research on control method of the robotic system and published paper recently [66]. Guide-rail types of robots have big advantages in stability, but there is a limitation in that the guide-rail needs to be constructed on buildings. The authors believe this method can be a good solution for the façade-cleaning automation, on the basis of the assumption that future high-rise buildings are designed with consideration of the need for the rail equipment to be installed.

Other approaches relate to the use of existing equipment on the high-rise building or using a hybrid type of locomotion, and different attachment mechanisms. Skypro in Cyprus has a conceptual design using a cleaning device on a gondola system [67] (Fig. 5c), while the authors are trying to develop a similar robotic device with support from the Korean government [68]. Pufeng Intelligent Tech. in China has announced a window cleaning robot that uses wire, tracked suction pads, and thrusters with tilting ability in the media [69] (Fig. 5d). By applying the three different adhesion mechanisms, this robot can maintain its position despite significant external disturbances.
As the complexity of design is increased, the possibility of failure and complexity of control are also increased; however, the authors note that the performance of recently developed cleaning devices has improved. For example, to save cleaning solvent, use of squeezing devices has recently received attention from researchers [70], and to achieve high cleaning performance overall, reliability is very important, and must be fully researched.
Portable cleaning robot with small scale is one direction of the commercialized robot such as Windowmate [32] and Winbot [30]. Recently, several robotic platform are suggested by researchers with similar suction mechanisms [71, 72]. Some modular concept to design a window cleaning robots are presented [73, 74]. There are many different types of tries to realize automated façade cleaning including green manufacturing of dry adhesives [75, 76], and they are continued until the big automated cleaning market is open.
8 Conclusions
The authors surveyed façade-cleaning robots for high-rise buildings in terms of their application in the replacement of human workers with robotic solutions. The investigated robots were classed in terms of their locomotion and attachment mechanisms, and information on their operating environment in Gangnam’s high-rise buildings was summarized to determine the feasibility of the robotic solutions in real world applications. The façade-cleaning robots were analyzed using several criteria, such as OOC, CP, climbing speed, and steering capability, with the latter two closely related to the locomotion and attachment methods used. Some recently developed robots were also analyzed.
The authors conclude that although many robotic solutions have been suggested by researchers, there is no single popular solution commercially available yet. Requirements for high OOC and CP are not easily fulfilled by existing solutions; speed is also very important, in terms of robotic solutions’ efficiency, and the wire/rope type has superior performance in this regard, although this type has limitations in terms of its steering capability.
Apart from the façade-cleaning robot itself, there are other issues to be overcome in order for a solution to be popular: ease of installation, retrieval, and operation in the real world are essential, and the business model shows that it is very important that the robot can be operated by a building’s owner, or by cleaning agents.
Overall, the authors hope these problems can be resolved by researchers, and that automated robotic solution can shortly be used in the dangerous and difficult working conditions currently faced by human workers. The automated façade-cleaning robotic system can help to improve the life quality of the human beings, and to make the environments to be cleaner. Also, some types of the façade cleaning robot can be easily applied to solar-cell cleaning to improve the energy efficiency [77].
References
Roomba, iRobot, http://www.irobot.com/For-the-Home/Vacuuming/Roomba.aspx. Accessed 11 May 2018.
Robot Vacuums, Samsung Electronics, https://www.samsung.com/us/home-appliances/vacuums/. Accessed 11 May 2018.
Air Engine, Balmuda, https://www.balmuda.com/jp/airengine/. Accessed 11 May 2018.
Korea occupational safety & health agency, http://www.kosha.or.kr/www/boardView.do?menuId=554&contentId=373432&boardType=A2. Accessed 11 May 2018.
Skyscraper. (2018). http://www.skyscrapercenter.com/countries. Accessed 11 May 2018.
How much do commercial window clenaers cost?, Kompareit, https://www.kompareit.com/business/cleaning-commercial-window-cost.html. Accessed 11 May 2018.
Kim, H., Kim, D., Yang, H., Lee, K., Seo, K., Chang, D. & Kim, J. (2006). A wall climbing robot with vacuum caterpillar wheel system operated by mechanical valve. In: Proc. of the 9th Int’l Conf. on Climb. and Walk. Rob. (pp. 28-33).
Zhu, J., Sun, D., & Tso, S. (2002). Development of a tracked climbing robot. Journal of Intelligent and robotic Systems, 35, 427–444.
Yano, T., Suwa, T., Murakami, M., & Yamamoto, T. (1997). Development of a semi self-contained wall climbing robot with scanning type suction cups. In: Proc. of the 1997 IEEE/RSJ Int. Conf. Intel. Rob. And Sys. (pp. 900–905).
Longo, D., Muscato, G. and Sessa, S., “Simulation and locomotion control for the Alicia3 climbing robot. In: Proc. of the 22nd Int. Sym. on Auto. and Rob. in Const. (pp. 843–850).
Miyake, T., Ishihara, H., & Tomino, T. (2008). Vacuum-based wet adhesion system for wall climbing robots-lubricating action and seal action by the liquid. In: Proc. of the 2008 IEEE Int. Conf. on Rob. and Bio. (pp. 1824–1829).
Gambao, E., & Hernando, M. (2006) Control system for a semi-automatic facade cleaning robot. In: Proc. of the 2006 Int. Sym. on Auto. and Rob. in Const. (pp. 406–411).
Balaguer, C., Gimenez, A., & Jardon, A. (2005). Climbing robots’ mobility for inspection and maintenance of 3D complex environments. Autonomous Robots, 18(2), 157–169.
Pack, R. T., Christopher, J. L., & Kawamura, K. (1997). A rubber actuator-based structure-climbing inspection robot. In: Proc. of the IEEE Int. Conf. on Rob. and Auto (pp. 1869–1874).
Hirose, S., & Arikawa, K. (2000). Coupled and decoupled actuation of robotic mechanisms. In: Proc. of the IEEE Int. Conf. on Rob. and Auto (pp. 33–39).
Minor, M., Dulimarta, H., Danghi, G., Mukherjee, R., Tummala, R. L. and Aslam, D., “Design, implementation, and evaluation of an under-actuated miniature biped climbing robot,” Proc. of the IEEE/RSJ Int. Conf. on Int. Rob. and Sys., pp. 1999-2005, 2000.
Loc, V. G., Kang, T. H., Song, H. S., & Choi, H. R. (2005). Gait planning of quadruped walking and climbing robot in convex corner environment. In: Proc. of the Int. Conf. on Cont., Auto. and Sys. (pp. 314–319).
Luk, B. L., Cooke, D. S., Galt, S., Collie, A. A., & Chen, S. (2005). Intelligent legged climbing service robot for remote maintenance applications in hazardous environments. Robotics and Autonomous System, 53(2), 142–152.
Krosuri, S. P., & Minor, M. A. (2003). A multifunctional hybrid hip joint for improved adaptability in miniature climbing robots. In: Proc. of the IEEE Int. Conf. on Rob. & Auto. (pp. 312–317).
Brockmann, W. (2006). Concept for energy-autarkic, autonomous climbing robots. In: Proc. of the 9th Int. Conf. on Climb. and Walk. Rob (pp. 121–128).
Wang, Z., Bao, G., Zhang, L., & Yang, Q. (2007). Development and control of flexible pneumatic wall-climbing robot. Journal of Central South University of Technology, 16, 0961–0970.
Hobot-198, Hobot Technology Inc. (2018). http://www.hobot.com.tw/Products_list_Window_Robot_198.php. Accessed 28 Apr 2018.
Zhang, H., Zhang, J., Wang, W., Liu, R., & Zong, G. (2007). “A series of pneumatic glass-wall cleaning robots for high-rise buildings. Industrial Robot: An International Journal, 34(2), 150–160.
Imaoka, N., Roh, S., Yusuke, N., & Hirose, S. (2010). SkyScraper-I: Tethered whole windows cleaning robot. In: Proc. of IEEE/RSJ Int. Conf. on Int. Rob. and Sys. (pp. 5460–5465).
Rosa, G. L., Messina, M., Muscato, G., & Sinatra, R. (2002). A low-cost lightweight climbing robot for the inspection of vertical surfaces. Mechatronics, 12(1), 71–96.
Backes, P. G., Bar-Cohen, Y., & Joffe, B. (1997). The multifunction automated crawling system (MACS). In: Proceedings of IEEE International Conference on Robotics and Automation (pp. 335–340).
Bach, F. R.-W., Rachkov, M., Seevers, J., & Hahn, M. (1995). High tractive power wall-climbing robot. Automation in Construction, 4(3), 213–224.
Apostolescu, T. C., Udrea, C., Duminica, D., Ionascu, G., Bogatu, L., & Cartal, L.A. (2011). Development of a climbing robot with vacuum attachment cups. In: Proc. of Int. Conf. on Inno.
TRIPILLAR, EPFL, Switzerland. (2018). http://mobots.epfl.ch/. Accessed 28 Apr 2018.
Winbot, Ecovacs. (2018). https://www.ecovacs.com/us/winbot-window-cleaning-robot/. Accessed 28 Apr 2018.
Lee, G., Wu, G., Kim, S. H., Kim, J. & Seo, T. (2012). Combot: compliant climbing robotic platform with transitioning capability and payload capacity. In: Proc. of the IEEE Int. Conf. on Rob. and Auto (pp. 2737–2742).
Windowmate, RF. (2018.) http://www.mywindowmate.com/c02/c02_011.php/. Accessed 28 Apr 2018.
Hillenbrand, C., Schmidt, D., & Berns, K. (2008). CROMSCI: Development of a climbing robot with negative pressure adhesion for inspections. Industrial Robot: An International Journal., 35(3), 228–237.
Shang, J., Bridge, B., Sattar, T., Mondal, S., & Brenner, A. (2008). “Development of a climbing robot for inspection of long weld lines. Industrial Robot: An International Journal, 35(3), 217–223.
Sanchez, J., Vazquez, F., & Paz, E. (2006). Machine vision guidance system for a modular climbing robot used in shipbuilding. In: Proceedings of the 9th International Conference on Climbing and Walking Robots (pp. 893–900).
Han, S.-C., Kim, J., & Yi, H.-C. (2009). A novel design of permanent magnet wheel with induction pin for mobile robot. International Journal of Precision Engineering and Manufacturing, 10(4), 143–146.
Morris, W., & Xiao, J. (2008). City-climber: Development of a novel wall-climbing robot. Journal of Student Res, 1, 40–45.
Menon, C., & Sitti, M. (2006). A biomimetic climbing robot based on the Gecko. Journla of Bionic Engineering, 3(3), 115–125.
Santos, D., Kim, S., Spenko, M., Parness, A., & Cutkosky, M. (2007) Directional adhesive structures for controlled climbing on smooth vertical surfaces. In: Proceedings of the IEEE Int. International Conference on Robotics and Automation (pp. 1262–1267).
Armada, M., Prieto, M., Akinfiev, T., Fernandez, R., Gonzalez, P., Garcia, E., et al. (2005). On the design and development of climbing and walking robots for the maritime industries. Maritime Research, 2(1), 9–32.
Kotay, K., & Rus, D. L. (1996). Navigating 3D steel web structures with an inchworm robot. In: Proceedings of the International Conference on Intelligent Robots and Systems (pp. 368–375).
Faina, A., Souto, D., Deibe, A., Lopez-Pena, F., Duro, R. J., & Fernandez, X. (2009). Development of a climbing robot for grit blasting operations in shipyards. In: Proceedings of the IEEE International Conference on Robotics and Automation (pp. 200–205).
Wang, W., Tang, B., Zhang, H., & Zong, G. (2010). Robotic cleaning system for glass facade of high-rise airport control tower. Industrial Robot: An International Journal, 37(5), 469–478.
Elkmann, N., Kunst, D., Krueger, T., Lucke, M., Bohme, T., Felsch, T., & Sturze, T. (2004). SIRIUSc: facade cleaning robot for a high-rise building in Munich, Germany. In: Proceedings of the 7th Internation Conference of Climbing and Walking Robots. (pp. 1033–1040).
Kim, T., Kim, J., Seo, K., Kim, H., Lee, G., Kim, J., et al. (2014). Design and control of a cleaning unit for a novel wall-climbing robot. Applied Mechanics and Materials, 541–542, 1092–1096.
Akinfiev, T., Armada, M., & Nabulsi, S. (2009). Climbing cleaning robot for vertical surfaces. Industrial Robot: An International Journal, 36(4), 352–357.
Highrise. (2018). IPC Eagle, http://www.ipceagle.com/products/highrise. Accessed 28 Apr 2018.
Manntech. (2018). Façade cleaning systems. http://www.manntech.de/en/index.html?home/products/facade_cleaning/facade_cleaning.html (retrieved at Apr. 28, 2018)
Warszawski, A. (1999). Industrialized and automated building systems-a managerial approach (2nd ed.). Abingdon: Taylor & Francis.
Qian, Z., Zhao, Y., Fu, Z., & Cao, Q. (2006). Design and realization of a non-actuated glass-curtain wall-cleaning robot prototype with dual suction cups. International Journal of Advanced Manufacturing Technology, 30, 147–155.
Schraft, R. D., Brauning, U., Orlowski, T., & Hornemann, M. (2000). Automated cleaning of windows on standard facades. Automation in Construction, 9, 489–501.
Seo, T., & Sitti, M. (2013). Tank-like module-based climbing robot using passive compliant joints. IEEE/ASME Transactions on Mechatronics, 18(1), 397–408.
Unver, O., & Sitti, M. (2010). Tankbot: A palm-size, tank-like climbing robot using soft elastomer adhesive treads. International Journal of Robotics Research, 29(14), 1761–1777.
Daltorio, K., Gorb, S., Peressadko, A., Horchler, A. D., Ritzmann, R. E. & Quinn, R. D. (2006). A robot that climbs walls using micro-structured polymer feet. In: Proceeedings of the 8th Climbing and Walking Robots (pp. 131–138).
Chung, W.K., Li, J., Chen, Y., and Xu, Y. (2011). A novel design of movable gripper for non-enclosable truss climbing. In: Proceeedings of the International Conference on Robotics and Automation (pp. 519–525).
Waal-E. (2018). NanoRobotics Lab, https://www.youtube.com/watch?v= k80fKwsga40/(retrieved at Apr. 28, 2018).
Murphy, M. P., Tso, W., Tanzini, M. and Sitti, M. (2006). Waalbot: an agile small-scale wall climbing robot utilizing pressure sensitive adhesives. In: Proceeedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3411–3416).
Balaguer, C., Gimenez, A., & Abderrahim, M. (2002). ROMA robots for inspection of steel based infrastructures. Industrial Robot: An International Journal, 29(3), 246–251.
Provancher, W. R., Jensen-segal, S. I., & Fehlberg, M. A. (2010). ROCR: an energy-efficient dynamic wall-climbing robot. IEEE/ASME Transactions on Mechatronics, 16(5), 897–906.
Serna, M. A., Avello, A., Briones, L., & Bustamante, P. (1998). ROBICEN: A pneumatic climbing robot for inspection of pipes and tanks. Lecture Notes in Control and Information Science, 232, 325–334.
Liu, Y., & Seo, T. (2018). AnyClimb-II: dry-adhesive linkage-type climbing robot for uneven vertical surfaces. Mechanism and Machine Theory, 124, 197–210.
Zhu, J., Sun, D., & Tso, S.-K. (2003). Application of a service climbing robot with motion planning and visual sensing. Journal of Robotic Systems, 20(4), 189–199.
Daum Road View. (2018). http://map.daum.net/. Accessed 26 Apr 2018.
Bisoh, Japan. (2018). https://www.bisoh.co.jp/product/permanent/window/. Accessed 26 Apr 2018.
Moon, S. M., Shin, C. Y., Hun, J., Oh, K. W., & Hong, D. (2015). Window cleaning system with water circulation for building façade maintenance robot and its efficiency analysis. International Journal of Precision Engineering and Manufacturing-Green Technology, 2(1), 65–72.
Lee, Y. S., Kim, S. H., Gil, M. S., Lee, S. H., Kang, M. S., Jang, S. H., et al. (2018). The study on the integrated control system for curtain wall building façade cleaning robot. Automation in Construction, 94, 39–45.
Skyprocy, Cyprus. (2018). http://www.skyprocy.com/. Accessed 26 Apr 2018.
Joo, I., Hong, J., Yoo, S., Kim, J., Kim, H. S., & Seo, T. (2019). Parallel 2-DoF manipulator for wall-cleaning applications. 101, 209–217.
Pufeng Intelligent Technology Co. Ltd., China, https://www.youtube.com/watch?v=4bV4azh5sO0. Accessed 26 Apr 2018.
Hong, J., Yoo, S., Joo, I., Kim, J., Kim, H. S., & Seo, T. (2019). Optimal parameter design of a cleaning device for vertical glass surfaces. International Journal of Precision Engineering and Manufacturing. https://doi.org/10.1007/s12541-019-00043-x.
Mir-Nasari, N., Siswoyo, H., Ali, M. H. (2018) Portable autonomous window cleaning robot. In: Proc. of Int’l Conf. on Robotics and Smart Manufacturing, 133, (pp. 197–204).
Abramson, S., Levin, S., Gur, D. (2017). Window cleaning robot. US patent, US20170164797A1, 2017.
Nansai, S., Elara, M. R., Tun, T. T., Veerajagadheswar, P., & Pathmakumar, T. (2017). A novel nested reconfigurable approach for a glass façade cleaning robot. Inventions, 2(3), 18.
Nansai, S., Onodera, K., Elara, M. R. (2017). Development of a modular robot for glass façade cleaning robot. In\:Proc. Of Int’l Conf. on Advanced Engineering (pp. 704–714).
Ko, H., Yi, H., & Joeng, H. E. (2017). Wall and ceiling climbing quadruped robot with superior water repellency manufacturing using 3D printing (UNIclimb). International Journal of Precision Engineering and Manufacturing-Green Technology, 4(3), 273–280.
Yi, H., Hwang, I., Sung, M., Lee, D., Kim, J. H., Kang, S. M., et al. (2014). “Bio-inspired adhesive systems for next-generation green manufacturing. International Journal of Precision Engineering and Manufacturing-Green Technology, 1(4), 347–351.
Choi, H., & Jeong, S. (2018). A review on eco-friendly quantum dot solar cells: materials and manufacturing process. International Journal of Precision Engineering and Manufacturing-Green Technology, 5(2), 349–358.
Acknowledgements
This research was supported by the National Research Foundation of Korea (NRF) Grant funded by the Ministry of Science and ICT for First-Mover Program for Accelerating Disruptive Technology Development (NRF-2018M3C1B9019309 and NRF-2018M3C1B9088328). The authors thank to Robust Design Engineering Laboratory members of Seoul National University for helping to investigate the Gangnam Building data.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Seo, T., Jeon, Y., Park, C. et al. Survey on Glass And Façade-Cleaning Robots: Climbing Mechanisms, Cleaning Methods, and Applications. Int. J. of Precis. Eng. and Manuf.-Green Tech. 6, 367–376 (2019). https://doi.org/10.1007/s40684-019-00079-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40684-019-00079-4