
Abstract
This article presents an experimental study that evaluated droop control strategies in DC microgrids with parallel-connected converters. In a decentralized control scheme, it is critical to ensure voltage regulation and load sharing in each converter to maintain a stable operation. Two scenarios are considered: the first involves two converters operating in parallel as voltage mode control, a conventional method discussed in the literature. In the second scenario, a less commonly used method is presented, in which one converter operates in voltage mode control and another operates in current mode control. The proposed decentralized control method is experimentally validated in a DC microgrid using parallel-connected lithium-ion batteries and converters. Load sharing results are examined under conditions with equal droop coefficients, demonstrating equivalent outcomes for specific load steps in both scenarios. However, in the case of different droop coefficients, the alternative method proves to be highly satisfactory, particularly for a broader range of load variations. The results confirm the efficacy of the control method in load sharing and voltage regulation among each converter, as well as the equivalence of control between both scenarios.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
DC microgrids (MGs) offer a promising alternative to traditional centralized electricity distribution, with several advantages over conventional AC power grids. Recent advancements in power electronics have enhanced the efficiency of DC–DC converters (Perez et al., 2018). This advancement aligns with the increasing adoption of DC-based loads and sources, leading to a reevaluation of DC distribution. Moreover, the global shift towards renewable energy sources, driven by environmental and economic factors, further supports the use of inherently DC power sources like photovoltaic and fuel cells (Cantarero, 2020). Additionally, DC MGs facilitate the integration of storage elements, predominantly comprised of batteries and ultra-capacitors that operate on DC (Benlahbib et al., 2020).
DC MGs can integrate renewable energy sources like solar power and provide crucial support for plug-in electric vehicles (Qin et al., 2020). Connecting solar panels directly to DC MGs requires only a single energy conversion step, enhancing efficiency compared to AC connections that necessitate two steps, reducing energy losses associated with DC–AC–DC conversions and thereby improving overall energy conversion efficiency. DC MGs are particularly well-suited for electric vehicle charging, eliminating the need for AC-DC conversion.
Utilizing redundant power sources or local energy storage, DC MGs can significantly enhance power system reliability during outages and operate independently in an islanded mode (Anand et al., 2013). With continued development of cost-effective DC power systems, DC MGs are increasingly attractive in various areas.
In order to ensure the robustness of a DC MG in the face of potential disturbances or failures, the preservation of stability and modularity becomes a requirement. To maintain the optimal performance of parallel-connected converters, voltage regulation and load sharing are essential (Irmak et al., 2019).
The two primary methods for voltage regulation and load sharing in parallel-connected converters are the droop concept and active current sharing. The active current sharing method, a communication network is used to distribute the same internal current reference to each converter, ensuring an even power output across all sources. The master/slave concept is a variant of the active current sharing method, where certain converters are designed to function as voltage sources to regulate the DC bus voltage, while others are current-controlled to facilitate load sharing (Rajagopalan et al., 1996). This approach offers precise voltage regulation and controllable load sharing, but it relies on centralized communication, which may introduce delays and degrade system performance. Additionally, if the master converter malfunctions, the entire system may become inoperative, leading to decreased reliability.
The concept of “droop” for DC voltage systems, as initially introduced by Johnson et al. (1993) and further developed by Jamerson and Mullet (1994), involves a straightforward and decentralized control methodology. This method uses the droop characteristic to regulate the output voltage of each converter in response to load changes. The limitations of the droop characteristic are determined by its slope, which establishes a trade-off between voltage regulation and load sharing, as demonstrated by Karlsson (2002).
Inadequate load distribution in electrical systems can be attributed to several factors, such as variations in component tolerances, dissimilarities in electrical conductors linking converters to a common load, and fluctuations in component characteristics resulting from unequal aging. To mitigate this problem, a number of solutions have been proposed in the literature (Gao et al., 2019).
The majority of research on droop control has predominantly been focused on mechanisms to mitigate the inherent limitations of droop control, especially in situations involving parallel-connected DC–DC converters operating in voltage mode control (VMC).
In the effort to overcome the limitations, a proposal was made for a centralized control system with a secondary control mechanism that employed the voltage shifting technique, as described by Guerrero et al. (2011).
As the research in the field advanced, several distributed control strategies were proposed associated with low bandwidth communication (LBC). Two averaging techniques have been introduced to facilitate this process: static averaging, which employs a centralized controller as described in Anand et al. (2013), and distributive control, as described in Lu et al. (2014). Additionally, dynamic averaging techniques, such as average voltage and average current, have been introduced, which rely on information from neighboring converters (Liu et al., 2015). Another method to achieve secondary control is through an average droop, based on the average voltage and current, as proposed by Wang et al. (2016).
According to the analysis in the DC MG conducted by Liu et al. (2020), enhancing the stability of the parallel-connected converters operated in VMC can be achieved by increasing the droop coefficient and bus capacitor, as evidenced by small-signal modeling and analysis.
Exploring the influence of communication delays on the implementation of outer control loops, such as droop control, has been a key area of investigation. Li et al. (2018) examines the impact of high droop coefficients in small-scale DC microgrids. It proposes a low-pass filter (LPF) method to address significant DC bus voltage oscillations, validated through simulation studies.
Baros et al. (2020) explored the effects of communication delays on the operation of adaptive droop control through simulation analysis. The study analyzed the system’s dynamic response to load step changes under varying delay times and concluded that communication delays have a significant impact on both the stability and performance of the system.
Beerten and Belmans (2013) conducted a study that compared power and current-based droop methods through a simulation of a multi-objective optimization approach for droop control in an HVDC system as a voltage source converter (VSC). The primary objective of this method is to address power and current-sharing issues that may arise due to converter failures. The study concluded that both methods are effective, but the accuracy of power-based droop control reduces with a reduction in droop gains.
Sun et al. (2023) introduces a new approach for determining steady-state power distribution in HVDC systems that utilize VSC with mixed current and power-based droop control. The proposed method enables effective co-regulation of powers and currents in DC grids.
The methodology suggested by Liu et al. (2019) is intended to overcome the limitations of traditional droop methods, which rely on fixed droop curves and constrain the power control flexibility of distributed energy resources. The suggested solution involves implementing an external power-based droop in conjunction with an inner voltage-based droop, which enables distributed energy resources to better track a desired power reference and thereby enhances their power control flexibility.
The impact of DC line impedance on droop control was studied by Gao et al. (2014), with a particular emphasis on current-based droop. Two simulations were proposed in the study to implement droop control for parallel-connected converters in current mode control (CMC), one using the local bus voltage and the other using the global voltage as the feedback signal. The results indicated that the current-based droop with global voltage feedback achieved the most effective current sharing performance.
In the current literature, there are no studies available for droop control involving one converter operating in CMC mode in parallel with another converter operating in VMC mode. Only simulated results for the isolated operation of a converter in CMC mode can be found. Well-established experimental results are exclusively focused on two similar converters operating in VMC mode.
Most of the studies in the existing body of literature predominantly employ non-commercial, low-power converters, with a primary focus on two analogous converters operating in VMC mode. The vast majority of these studies are conducted through simulation or real-time simulation. Notably, these studies do not yield significant findings concerning the incorporation of external control through the utilization of commercial solutions or with a Programmable Logic Controller (PLC). The research aims to establish a foundation for external converter control via a PLC and address challenges in parallel converter operation, emphasizing the need for a custom digital LPF for control loop requirements.
This paper is structured as follows: In Sect. 2, a detailed description of voltage-based and current-based droop control techniques for DC MGs is presented. Section 3 describes the system overview of a DC MG living laboratory. Section 4 provides a comprehensive explanation of the proposed decentralized control and the methodology used for validation. In Sect. 5, the practical results of the control implementation are discussed followed by conclusions and references.
2 Droop Control for DC MGs
In this paper, two distinct droop control methods are presented for power converters. The first method is based on voltage droop, which utilizes the V–I curve and requires the converter to operate in VMC. The mathematical relationship is defined as:
\(V_{_{i}}\) is the output voltage of the i-th converter, \(V_{\text {r}}\) is the initial reference voltage, \(R_{{\text {d}}{_i}}\) is the droop coefficient of the i-th converter, and \(I{_{_i}}\) is the output current of the i-th converter. The voltage droop method maintains a linear output voltage by adjusting the voltage in proportion to the DC bus load. As the load increases, the output voltage decreases proportionally to a constant droop ratio.
The second method is based on current droop, which utilizes the I–V curve. This method requires the converter to operate in CMC. The mathematical relationship is defined as:
\(I_{_i}\) is the output current of the i-th converter for a initial reference voltage \(V_{\text {r}}\), \(V_{_{i}}\) is the output voltage of the i-th converter, and \(R_{{\text {d}}{_i}}\) is the droop coefficient of the i-th converter. The current droop method defines the output current as a function of the voltage difference between the reference voltage and the load voltage. When the load increases, the output current also increases to sustain the constant differential voltage.
To analyze the parallel operation of converters, with one operating as a CMC and the other as a VMC, Thevenin and Norton equivalent circuits can be utilized. Figure 1 illustrates a simplified model of two converters connected in parallel.

Simplified model of two parallel-connected converters with droop control
By applying Kirchhoff’s Voltage Law (KVL) and Current Law (KCL) in the circuit of Fig. 1, the expressions for the converters output currents can be obtained as:
where the initial reference output voltage are represented by \(V_{{\text {r}}_{1}}\) and \(V_{{\text {r}}_{2}}\), while \(R_{{\text {l}}_{1}}\) and \(R_{{\text {l}}_{2}}\) denote the cable resistances up to the loads. \(R_{p}\) represents the load resistance and \(V_{p}\) represents the voltage, while \(I{_{1}}\) and \(I{{_2}}\) denote the output currents of the converters. For simplification, the equivalent output resistance of the converter is denoted as \(R_{{\text {d}}_i}' = R_{{\text {d}}_i} + R_{{\text {l}}_i}\).
The difference between (3) and (4) can be used to demonstrate the deviation in current supplied by each converter, which is written as:
Through the transformation of the Norton equivalent circuit of the converter into an Thevenin’s equivalent circuit, illustrated in Figure 1, it is feasible to establish such as \(V_{{\text {r}}{_2}} = I_{_2}' R_{{\text {d}}_{2}}\).
The difference currents described in (5) consist of two distinct parts: the load current component, \(I_{i}\), and the asymmetric load sharing component, which represents the term that causes current imbalances.
The first trade-off of the technique can be observed, which shows that increasing the droop coefficient enhances load sharing between converters. Elevated loads have the potential to generate uneven currents, especially in cables that link converters and loads with varying resistances.
The difference current between converters is illustrated in Fig. 2, wherein varying magnitudes of line resistance are considered while keeping the droop parameters and the load constant \(R_{{\text {d}}{_i}}\)= 1.2 \(\Omega \) and \(R_{p}\)= 50 \(\Omega \). Notably, the line resistances are altered from 0 \(\Omega \) to 2 \(\Omega \).

Circulating current for variable cable resistances of simulated results
Assuming droop control, the Thevenin equivalent voltage (\(V_{{\text {th}}{{_i}}}\)) of the parallel-connected converters and the equivalent resistance (\(R_{{\text {d}}_{_i}}\)), are given by:
\(I_{p}\), is the sum of the individual currents \(I_{1}\) and \(I_{2}\). It is noteworthy that an increase in the output resistances could potentially cause a deterioration in the regulation of load voltage (\(V_p\)).
In (5) and (6), the inherent limitations of the conventional droop coefficient are illustrated. In essence, selecting a larger droop coefficient facilitates superior load sharing and a lower voltage regulation, whereas choosing a smaller droop coefficient results in suboptimal load sharing and higher voltage regulation.
3 DC Microgrid Laboratory
A experimental setup of a DC MG situated at the Federal University of Paraná (UFPR) in Curitiba, Brazil, is described in this study. The DC MG forms part of a larger MG laboratory that also includes an AC MG connected to the distribution system.
The main purpose of the DC MG system is to generate, store, and distribute electricity to power the loads in the building where it is installed. To meet the power requirements of the available DC loads, a laboratory test bench has been developed within the DC MG.
The testing setup includes a DC bus that is shared and linked with two 30 kW DC–DC converters, which have the capability to function in either VMC or CMC. These converters are then connected to lithium-ion batteries that have a voltage of 50 V and a total capacity of 40 Ah.
In order to assess the performance of control strategies, the laboratory test bench is equipped with a PLC, which facilitates monitoring and control of the converters within the DC MG via a supervisory SCADA control system. The communication network employs the PROFINET I/O protocol in the application layer, and the TCP/IP protocol in the network layer.
The PLC assumes the role of an external controller to enable the implementation of voltage-current droop control. In addition, to simulate rapidly changing load scenarios, the DC MG system employs four resistors as local variable loads, with each load connected to a separate contactor that is controlled by the PLC.
Figure 3 illustrates the devices present in the DC MG laboratory, which serves as an testbed for assessing the efficacy of control strategies. In particular, the figure depicts the bidirectional 30 kW DC–DC power converters, lithium-ion batteries, resistive variable DC loads, and PLC that are integrated into the laboratory setup.

Architectural overview of the test bench
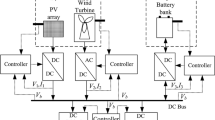
A schematic diagram of the system described is presented in Fig. 4, which displays the electric diagram and the communication between the MG components.

Schematic diagram of the test bench
The cables used to connect the DC bus to the converters have a resistance of 1.95 \(\Omega \)/km. Given the short length of the cables for both converters, it was assumed that their impact on load sharing in the experiments conducted in this study would be negligible.
4 Proposed Control Strategy

Proposed Conventional Method Control for Power Sharing in a DC Microgrid

Proposed Alternate Method Control for Power Sharing in a DC Microgrid
This research proposes a control methodology that utilizes a cascaded loop based on the concept of different time scales. The proposed methodology consists of an outer loop, which employs droop control operating at a slower timescale. The function of the outer loop is to generate a reference value for the inner-loop’s Proportional-Integral (PI) controller, which can regulate either the current or voltage output.
A decentralized control system based on droop control was implemented, using sensors integrated into the converter to measure local voltage and current. The output signal of the droop control is then determined based on either the V–I curve or the I–V curve, which can be derived from (1) and (2), respectively.
The converters are capable of operating in two distinct modes: VMC and CMC. In VMC with voltage droop control, each converter independently regulates its output voltage based on a setpoint voltage. The VMC employs a cascade control approach, where the voltage control acts as the outer loop and specifies a current setpoint for the inner current loop. In this mode the PLC employs a voltage droop control strategy, this involves measuring the current and taking into account the V–I droop curve to adjust the output voltage as needed.
In CMC, the output current is adjusted to match a predefined current setpoint. In this mode, a PLC implements a current droop control, wherein the output current is precisely regulated by monitoring the voltage and considering the I–V current droop curve. This control strategy guarantees a linear output voltage that dynamically adjusts the setpoint current to compensate for any fluctuations in the load resistance.
The study examined two setups that utilize the droop control method. The first setup implemented the conventional method described in existing literature, where two converters were operated in parallel as VMC. Sensors within the converters measured the current output and transmitted the data to a PLC. The PLC then computed a new reference voltage based on the voltage droop curve (V–I) and transmitted it to the inner voltage loop of the respective converter. Figure 5 illustrates the proposed control method for the first scenario.
An alternate approach is investigated in the second setup, where two converters were parallel-connected with droop control—one operating in VCM and the other in CMC. The VMC converter followed the same methodology as described above. In contrast, for the CMC converter, the output voltage was measured by the converter’s sensor and transmitted to the PLC. The PLC calculated a new reference current based on the current droop curve (I–V) and passed it through a LPF using (6). The LPF signal is first filtered by the static current limit before being applied to the inner current loop of the converter. Figure 6 illustrates the proposed control method for the second setup.
The measured parameters \(V_{_1}^{_\prime }\) and \(V_{_2}^{_\prime }\) are the instantaneous voltages measured within the voltage loop of the converter, while \(I_{_1}^{_\prime }\) is the instantaneous current measured within the current loop of the converter.
According to Li et al. (2018), based on the closed-loop transfer function from \(V_{_{\text {r}}}\) to \(V_{_i}\), the introduction of droop control links the oscillations in output current to the closed loop. For frequencies below the crossover frequency, the amplitude of these oscillations cannot be well suppressed due to the 0 dB loop gain. Consequently, the low-frequency oscillations will be further transmitted to the output voltage.
A practical approach to mitigate significant fluctuations in output voltage is by incorporating a LPF into the feedback current.
In order to ensure a controllable time delay response in the alternative topology, the LPF with a specific time constant is utilized. The time constant of LPF plays a crucial role in adjusting the converter’s setpoint. A small time constant may not effectively stabilize the system, while a time constant that is too large may cause the filter to respond too slowly to changes in the referenced value. The digital implementation of the LPF is given by:
which represents a discrete-time LPF in which the output signal y[n] at time step n is a weighted sum of the previous output signal \(y[n-1]\) and the current input signal x[n]. The weighting coefficients are determined by the time constant T and the sampling time Ts, and the filter output is a smoothed version of the input signal with high-frequency components attenuated.
Designing control loops requires careful consideration of the sampling frequency and bandwidth of each loop. Typically, the outer loop has a lower bandwidth than the inner loop, as it has slower dynamics and is responsible for setting the reference for the inner loop.
The current inner loop of the converter operates at a frequency of 500 \(\mu \)s. However, the setpoint adjustment was limited by the manufacturer to a maximum sampling frequency of 250 Hz. To maintain the stability of the system and achieve a quicker and more consistent response, a setup scheme was tested for various time constants in the LPF.
When implementing a current-based droop control, the output of the droop controller can potentially cause voltage spikes or voltage dips that may activate overvoltage or undervoltage protection mechanisms in the converter. This effect is more noticeable during the converter’s initial integration into the system or in response to load changes, particularly when it is operating in an isolated manner. To address this issue, a possible solution is to employ a static current limit that restricts the transient signals from the outer loop before they propagate to the inner loop.
Given that the goal of the studied system is to compare the challenges, advantages, and feasibility of two control methodologies for power sharing in an experimental application, it is assumed that the lithium-ion battery has enough charge for required power demands in all proposed scenarios.
The scenarios were conducted by connecting four resistive loads in parallel and varying the equivalent resistance through the periodic addition and removal of loads from the DC bus. The proposed approach was tested to showcase its practicality and potential, across various operating conditions. To provide a comprehensive analysis of the alternative approach’s capabilities, its performance was compared with existing method in the literature.
5 Experimental Results
5.1 Low-Pass Filter Validation
In order to assess the stability of the inner current loop with varying time constants in the LPF, a single converter was tested in CMC with a consistent load step and two droop coefficients (2.4 \(\Omega \) and 0.6 \(\Omega \)) across four different time constants (0 s, 0.05 s, 0.1 s, and 4 s).
Initially, the converter was connected to the grid in CMC, operating under low load conditions without droop control. After approximately 10 s, the current droop control was activated, and shortly afterward, the grid was subjected to a load step. The output current of the converter was measured for each test, and the results were plotted in Fig. 7.

Output current measurements for different time constants and droop coefficients of experimental results
The study findings indicate that smaller droop coefficients result in increased oscillations for the same load step and time constant for converter in CMC. When droop control is added, it increases oscillations in output current, especially in the low-frequency range.
Specifically, when the time constant is set to zero, the output current becomes unstable as the inner loop updates its value at 100% of the referenced value at a frequency of 250 Hz. Thus, increasing the time constant to 0.1 s improves performance in outer loop and the best results are obtained with time constants greater than 1 s.
To mitigate the effects of the time constant, a safety margin of 4 s was introduced in the experimental setup.
In the absence of specific international DC MG standards, guidelines from established electrical standards were followed. NEC (National Electrical Code) 210.19 allows for a 5% voltage drop (National Electrical Code, 2020). Similarly, IEC (International Electrotechnical Commission) 60364-5-52 permits voltage drops ranging from 3% to 5% (International Electrotechnical Commission, 2009).Furthermore, BS7671, as specified by The Institution of Engineering and Technology, limits voltage drops to the range of 3–5% (Institution of Engineering, 2022). The droop coefficient in this paper was designed to achieve a maximum of 4% voltage regulation, and this was accomplished using a 1.2 ohm.
5.2 Results of the Proposed Control
The study encompassed three scenarios. In the first scenario, converters operated in parallel with identical droop coefficients, both functioning in VMC. In the second scenario, both converters operated in parallel with identical droop coefficients, but one was in VCM, and the other was in CCM. The third scenario examined converters operating in parallel with varying droop coefficients, with one in VMC and the other in CCM.
Two initial scenarios were conducted to assess the effectiveness of control, as depicted in Figs. 6 and 7, respectively.In both scenarios, equivalent resistive loads were used to induce load variations. Table 1 provides an overview of the general equipment parameters employed in the experiments.
To validate the control strategies, this section provides the equations of voltage regulation and current sharing for a DC converter, as presented below:
\(V_{{\text {r}}_{i}}({\%})\) and \(I_{_{i}}({\%})\) represent the percentage values of voltage regulation and current sharing for the i-th converter.
In the first scenario, both DC–DC converters in VMC were connected simultaneously, while in the second scenario, one converter in VMC was connected and after the converter in CMC. In both scenarios, a droop coefficient of 1.2 \(\Omega \) was used for each converter.
Tables 2 and 3 present the measured average output voltage data \(V_{i}\) for each converter, as well as the corresponding voltage regulation \(V_{i}(\%)\) and loading sharing \(I_{i}(\%)\) values, and the equivalent resistance \(R_{p}\) in DC bus for the two scenarios.
The profiles of output voltages and output currents for each converter in their respective scenarios are shown in Figs. 8 and 9, where the equivalent resistances responsible for the load steps are displayed.
When both converters operated as VMC, load sharing was almost uniform across all load steps, and consistent for equal loads at the input and output, with a slight improvement was observed for resistances ranging from 53.33 \(\Omega \) to 26.67 \(\Omega \). In contrast, in the second scenario, there was a significant improvement in load sharing as the load increased for all load steps.

Output voltage and current of experimental results for load steps in conventional droop control method with equal droop coefficients

Output voltage and current of experimental results for load steps in alternate droop control method with equal droop coefficients
The voltage curve remained stable in both scenarios, and proportional voltage regulation was achieved through the implementation of droop coefficients.
Both scenarios yielded comparable overvoltage levels, but the second scenario experienced a longer stabilization time due to the constraints of the native equipment setpoint reading. This limitation resulted in a delay in reaching stability through the use of the LPF.
Considering that conventional droop control relies on droop coefficients and load variations, it has the potential to pose a challenge by causing voltage sag in the DC bus. In order to assess this issue, a comparison is conducted between the voltage sag events observed in the previous scenarios under similar conditions of load variation and load step.
Table 4 presents the absolute value of sag voltage (\({V_{s}}\)), the load resistance (\(R_{p}\)), and the variation of the load resistance, where negative values indicate load input, and positive values represent load output (\(\Delta R_{p}\)).
The voltage sag in the alternative method exhibits minimal fluctuation across all three observed cases, both at the load output and input. The conventional method yields superior results at the load output, whereas inferior outcomes are observed at the load input.
The third scenario was based on the alternative control proposal, which utilized different droop coefficients. The converter in VMC had a droop coefficient of 1.2 \(\Omega \), while the converter in CMC had a droop coefficient of 0.6 \(\Omega \). The measured parameters are presented in Table 5, while Fig. 10 displays the profiles of the output current and output voltage for each converter.
When unequal droop coefficients were utilized, load sharing became directly proportional to the implemented droop coefficients, resulting in an average of approximately one third for the converter operating in CMC mode and two thirds for the converter operating in VMC mode.

Output voltage and current of experimental results for load steps in alternate droop control method with differents droop coefficients
In this scenario, the current curves displayed less oscillation compared to the same loads with equal droop coefficients. Additionally, the variations in load sharing with respect to load were found to be negligible, which was in contrast to what was observed in previous scenario.
This observation indicates that achieving equal load sharing with stable output voltages is a complex task, as the output voltages of the converters are found to be much closer to each other in this scenario. It may be beneficial to explore the use of batteries or converters with different capacities and implementing proportional droop coefficients.
For specific step loads, both methodologies demonstrated similar load-sharing capabilities. However, the second method offers a significant advantage by enabling the reduction of short-circuit currents and providing the ability to implement control strategies at the secondary level using the current signal.
6 Conclusions
The proposed alternative strategy for parallel DC converters in DC microgrids has undergone a thorough evaluation, juxtaposed with the conventional method. External control validation was attained by employing commercial converters in parallel operation with the aid of a PLC.
The VMC converter effectively regulates output voltage, while the CMC converter enhances control over current and current-sharing capabilities. However, this approach may introduce added complexity to the control system. It proves beneficial by allowing the implementation of control strategies externally using a PLC, which utilizes current and voltage signals from each converter.
The project introduced a custom digital LPF, showcasing its essential role in integrating the control loop and affirming its effectiveness. This included assessing the time constant of the LPF and the droop coefficient concerning the reduction of current oscillations. Additionally, it was observed that, for higher currents, the converter in CMC mode exhibits reduced oscillations.
Results indicated that the scheme can maintain voltage stability with a deviation of less than 4% under various load conditions. Furthermore, under specific conditions, the scheme successfully achieved equal current sharing between paralleled converters. The consistency in results between both operation strategies, particularly when the LPF is tailored to a specific load range, underscores the efficacy of the proposed scheme. It is noteworthy that, despite the primary focus on primary control in this paper, the synthetic design of primary control was conducted over a more extended timescale, adding depth to the assessment.
It is important to note that utilizing a combination of VMC and CMC can be advantageous when handling power converters with distinct power capacities. Non-identical converters have distinct control loops and construction aspects, leading to significant load sharing imbalances with even minor differences in output voltage when both converters operate in VMC.
References
Anand, S., Fernandes, B. G., & Guerrero, J. M. (2013). Distributed control to ensure proportional load sharing and improve voltage regulation in low-voltage DC microgrids. IEEE Transactions on Power Electronics, 28(4), 1900–1913. https://doi.org/10.1109/TPEL.2012.2215055
Baros, D., Rigogiannis, N., Papanikolaou, N., & Loupis, M. (2020). Investigation of communication delay impact on DC microgrids with adaptive droop control. In 2020 International symposium on industrial electronics and applications, INDEL 2020 - proceedings (pp. 1–6). IEEE. https://doi.org/10.1109/INDEL50386.2020.9266166
Beerten, J., & Belmans, R. (2013). Analysis of power sharing and voltage deviations in droop-controlled DC grids. IEEE Transactions on Power Systems, 28(4), 4588–4597. https://doi.org/10.1109/TPWRS.2013.2272494
Benlahbib, B., Bouarroudj, N., Mekhilef, S., et al. (2020). Experimental investigation of power management and control of a pv/wind/fuel cell/battery hybrid energy system microgrid. International Journal of Hydrogen Energy., 45(53), 29110–29122. https://doi.org/10.1016/j.ijhydene.2020.07.251
Cantarero, M. M. V. (2020). Of renewable energy, energy democracy, and sustainable development: A roadmap to accelerate the energy transition in developing countries. Energy Research and Social Science, 70(101), 716. https://doi.org/10.1016/j.erss.2020.101716
Gao, F., Gu, Y., Bozhko, S., Asher, G., & Wheeler, P. (2014). Analysis of droop control methods in DC microgrid. In 2014 16th European conference on power electronics and applications, EPE-ECCE Europe 2014. https://doi.org/10.1109/EPE.2014.6910846
Gao, F., Kang, R., Cao, J., & Yang, T. (2019). Primary and secondary control in DC microgrids: A review. https://doi.org/10.1007/s40565-018-0466-5
Guerrero, J. M., Vasquez, J. C., Matas, J., De Vicuna, L. G., & Castilla, M. (2011). Hierarchical control of droop-controlled AC and DC microgrids: A general approach toward standardization. IEEE Transactions on Industrial Electronics, 58(1), 158–172. https://doi.org/10.1109/TIE.2010.2066534
Institution of Engineering and Technology (2022) IET: On-Site Guide (BS 7671:2018+A2:2022), 8th edn. Institution of Engineering and Technology, 23 May 2022.
International Electrotechnical Commission (2009) IEC 60364-5-52:2009, 3rd edn. International Standard
Irmak, E., Guler, N., Kabalci, E., Calpbinici, A. (2019). A modified droop control method for PV systems in Island mode DC microgrid. In 8th international conference on renewable energy research and applications, ICRERA 2019 (pp. 1008–1013). Institute of Electrical and Electronics Engineers Inc. https://doi.org/10.1109/ICRERA47325.2019.8997075
Jamerson, C., & Mullet, C. (1994). Paralleling supplies via various droop methods. Ninth International High Frequency Power Conversion (pp. 68–76).
Johnson, B. K., Lasseter, R. H., Alvarado, F. L., & Adapa, R. (1993). Expandable multiterminal DC systems based on voltage droop. IEEE Transactions on Power Delivery, 8(4), 1926–1932. https://doi.org/10.1109/61.248304
Karlsson, P. (2002). DC distributed power systems—Analysis, design and control for a renewable energy system.
Li, F., Lin, Z., Cao, W., Chen, A., & Wu, J. (2018). A low-pass filter method to suppress the voltage variations caused by introducing droop control in dc microgrids. In 2018 IEEE energy conversion congress and exposition (ECCE) (pp. 1151–1155). https://doi.org/10.1109/ECCE.2018.8557455
Liu, G., Caldognetto, T., Mattavelli, P., et al. (2019). Power-based droop control in DC microgrids enabling seamless disconnection from upstream grids. IEEE Transactions on Power Electronics, 34(3), 2039–2051. https://doi.org/10.1109/TPEL.2018.2839667
Liu, S., Zheng, J., Li, Z., & Liu, X. (2020). A general piecewise droop design method for DC microgrid. International Journal of Electronics., 108(5), 758–776. https://doi.org/10.1080/00207217.2020.1818839
Liu, Y., Wang, J., Li, N., et al. (2015). Enhanced load power sharing accuracy in droop-controlled DC microgrids with both mesh and radial configurations. Energies, 8(5), 3591–3605. https://doi.org/10.3390/en8053591
Lu, X., Guerrero, J. M., Sun, K., et al. (2014). An improved droop control method for dc microgrids based on low bandwidth communication with dc bus voltage restoration and enhanced current sharing accuracy. IEEE Transactions on Power Electronics, 29(4), 1800–1812. https://doi.org/10.1109/TPEL.2013.2266419
National Electrical Code. (2020). National Electrical Code, 2008th edn. National Fire Protection Association (NFPA) and National Board of Fire Underwriters and National Fire Protection Association. National Electrical Code Committee, 1 Batterymarch Park, Quincy, MA 02169-7471, nFPA 70™
Perez, F., Iovine, A., Damm, G, & Ribeiro, P. (2018). Dc microgrid voltage stability by dynamic feedback linearization. In 2018 IEEE international conference on industrial technology (ICIT) (pp. 129–134). https://doi.org/10.1109/ICIT.2018.8352164
Qin, D., Sun, Q., Wang, R., Ma, D., & Liu, M. (2020). Adaptive bidirectional droop control for electric vehicles parking with vehicle-to-grid service in microgrid. CSEE Journal of Power and Energy Systems, 6(4), 793–805. https://doi.org/10.17775/CSEEJPES.2020.00310
Rajagopalan, J., Xing, K., Guo, Y., Lee, F. C., & Manners, B. (1996). Modeling and dynamic analysis of paralleled dc/dc converters with master-slave current sharing control. In Conference proceedings - IEEE applied power electronics conference and exposition - APEC, (2, pp. 678–684). https://doi.org/10.1109/apec.1996.500513
Sun, P., Wang, Y., Khalid, M., Blasco-Gimenez, R., & Konstantinou, G. (2023). Steady-state power distribution in VSC-based MTDC systems and dc grids under mixed P/V and I/V droop control. Electric Power Systems Research, 214,. https://doi.org/10.1016/j.epsr.2022.108798
Wang, P., Lu, X., Yang, X., Wang, W., & Xu, D. (2016). An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Transactions on Power Electronics, 31(9), 6658–6673. https://doi.org/10.1109/TPEL.2015.2499310
Funding
This research has been financially supported by the Coordination for the Improvement of Higher Education Personnel (CAPES), which is a Brazilian Federal Agency for Support and Evaluation of Graduate Education within the Ministry of Education of Brazil.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Guarinho Silva, R.A., Vilela, J.A. Experimental Investigation of Droop Control for Power Sharing of Parallel DC–DC Converters in Voltage and Current Mode Control. J Control Autom Electr Syst (2024). https://doi.org/10.1007/s40313-024-01101-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40313-024-01101-0