
Abstract
Mars orbiter mission (MOM) is India’s first interplanetary mission. MOM was planned to be launched by Polar Satellite Launch Vehicle (PSLV) into an Earth elliptic parking orbit (EPO) in Oct-Nov 2013 utilizing the 2013 opportunity to rendezvous with Mars. This paper covers the mission design and analysis carried out for the MOM/PSLV mission. New software tools were designed and developed to design interplanetary trajectories, to generate total maneuver strategy from earth EPO to target Martian orbit, to design trajectory correction maneuvers in interplanetary cruise phase targeting to desired B-plane parameters and to design Mars orbit insertion maneuver. The launch window and optimum EPO requirements were generated and provided to PSLV. The target Martian orbit was selected considering all the specified s/c platform and payload constraints. Maneuver strategies were designed considering operational constraints and total mission profiles were studied comprising orbital events and Earth-Satellite-Sun geometry and distance characteristics. Non-nominal mission scenarios were studied, comprising launcher dispersions, missing any of the earth phase burns and backup maneuver plans generated. Mars orbit insertion maneuver strategy was designed considering nominal and non-nominal scenarios. MOM was launched on 5th November, 2013 and successfully captured into the desired Martian orbit on 24th September, 2014 achieving the main technological objective of the mission in India’s first interplanetary endeavor.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
One of the main objectives of the first Indian mission to Mars is to develop the technologies required for design, planning, management and operations of an interplanetary mission to Mars. Design and development of models, algorithms and software tools required to realize an orbiter mission to Mars were carried out. Software were designed and developed for the following tasks:
-
Interplanetary trajectory design, employing the Lambert’s algorithm, to compute all the interplanetary trajectory design parameters, given the Earth departure date and transfer time, and to generate the launch opportunities [1, 2]
-
Impulsive Maneuver strategy generation to achieve target Martian orbit
-
Finite Maneuver strategy generation for Earth burns in Earth orbiting phase and Trans-Mars Injection (TMI) to achieve specified Mars arrival trajectory
-
Trajectory correction maneuver planning in interplanetary cruise and Mars arrival phases
-
Mars orbit insertion (MOI) finite maneuver strategy generation
MOM mission scenario is unique, involving transfer of the spacecraft from earth parking orbit phase to Mars transfer trajectory phase in several perigee burns using the main 440 N liquid engine and after nearly ten months of interplanetary cruise, Mars orbit insertion (MOI) employing the same engine. The committed operational life of the s/c in Martian orbit was six months. The mission design and analysis was carried out using the newly developed software.
The s/c mass at lift-off is 1337 kg with dry mass of 485 kg. The s/c has two propellant tanks of 390 l capacity each with maximum propellant loading of about 852 kg. MOM is equipped with a 440 N liquid engine for performing all Earth phase orbit maneuvers and Mars orbit insertion (MOI). The engine is mounted on the negative Roll face. Eight smaller engines of 22 N thrust level each are also mounted on –Roll face with appropriate canting to provide three-axis attitude control and to perform trajectory correction maneuvers (TCM) and orbit maintenance maneuvers. There are star sensors, sun sensors and gyros to provide attitude information. There is an accelerometer package to measure the accelerations due to thrusting and it is used for thruster firing termination when the desired delta-V is accumulated. There are three communications antennae, low gain (LGA), medium gain (MGA) and high gain (HGA). The LGA has a field of view (FOV) of ±90 deg and is used in the Earth phase. The MGA has an FOV of ±40 deg and is used in the early part of the interplanetary cruise phase. The HGA has an FOV of ±2 deg and is used in the later part of the cruise phase and further in the Martian phase. The MOM s/c view in fully deployed configurations is shown in Fig. 1.

MOM s/c view
Launch Period and Launch Window
MOM was planned to be launched by Polar Satellite Launch Vehicle (PSLV) from Satish Dhawan Space Centre (SDSC), Sriharikota Range (SHAR), into an elliptic parking orbit of size 250 × 23,000 km and inclination 19.2 deg. The launch opportunities for Earth to Mars transfer were first studied for various years. The interplanetary transfer trajectory was designed and the delta-v requirements were computed and the optimum launch opportunity and launch period were worked out for the year 2013. The departure hyperbolic trajectory parameters were computed for each case and the initial elliptic parking orbit (EPO) right ascension of ascending node (RAAN) and argument of perigee (AOP) requirements were generated [3]. PSLV met the AOP requirement by introducing an appropriate coast phase in the launch trajectory between the third stage burnout and fourth and final stage ignition.
The departure opportunity for the EPO inclination of 19.2 deg as well as the optimum departure opportunity for the year 2013 is shown in Table 1. The departure trajectory with V-inf declination of 20.2 deg, which is higher than the EPO inclination, was achievable due to the natural increase in inclination due to orbit perturbations during the course of the Earth-centered phase. PSLV could not target to inclination higher than 19.2 due to range safety constraints. A one-month launch period was identified from 2013 Oct 15 to Nov 15, holding Nov 30 as the date of Earth departure with the TMI maneuver [4].
There is one optimum launch time in a day which is determined by the desired RAAN value. Launch window duration of 5 min, starting from the optimum launch time, was provided to PSLV to minimize deviation of RAAN from the optimum value which results in propellant penalty for the Mission. The launch time, determined by the RAAN requirement, and the AOP requirement for 2013 Nov 5 launch are shown in Table 2. The launch time and desired AOP requirements, for each date in the launch period, were given to PSLV. PSLV designed the vehicle trajectory for each day with appropriate coasting phase durations to meet the AOP requirement.
Target Martian Orbit
Mars Orbiter Mission was mainly a technology development driven mission rather than science driven. MOM carried five payloads: Mars color camera (MCC) for optical imaging, Thermal infrared imaging spectrometer (TIS) for study of surface composition and mineralogy, Methane sensor for Mars (MSM), Mars exospheric neutral composition analyzer (MENCA) and Lyman alpha photometer (LAP) for study of Mars upper atmosphere. The targeted Martian orbit size is 500 × 80,000 km. The apoapsis height of 80,000 km is chosen to limit Mars Orbit Insertion (MOI) delta-V and enable realizing the Mission with PSLV. The mission constraints considered for fixing the other orbit parameters of inclination, RAAN and AOP are as follows:
-
Eclipse in Martian orbit should be less than 100 min
-
Proper sun illumination conditions for payload operation should be achieved from first orbit after MOI and imaging from apoapsis region should be possible from first orbit after MOI
-
Illumination was required from apoapsis region for capturing Mars full disc image by the MCC.
-
-
Orbit periapsis altitude should be stable for one year
Three direct orbits and four retrograde orbits with inclinations ranging from 34 deg to 151 deg were analyzed for the Mars Orbiter to meet eclipse, sun illumination for imaging from higher altitudes and orbit stability constraints. The retrograde orbits with inclinations of 142 deg and 151 deg provide imaging opportunities from the first orbit after MOI and imaging from apoapsis region covering full Mars disc is possible from the first orbit. The maximum eclipse duration for the 151 deg inclination orbits is less than 100 min of umbra. The 151 deg inclination orbit is also found to be favorable from the viewpoint of star sensor mounting and minimizing star sensor occultation period [5]. The Martian orbit periapsis altitude variation was studied for all the candidate orbits. It was found that the periapsis is stable for one year in all the cases. The periapsis altitude variation for the retrograde orbit cases is shown in Fig. 2. The selected target Martian orbit is provided in Table 3.

Periapsis height variation
Maneuver Strategy Design
Maneuver strategies were generated and mission profile simulations were carried out, for various launch dates in the launch period. The nominal PSLV EPO orbit parameters are provided in Table 4 for the launch date of Nov 5. The ground station network employed for the Mission is shown in Table 5. The spacecraft control center is located in Bangalore, India, which would support telemetry, tracking and command (TTC) and in all phases of the mission. The Jet Propulsion Laboratory (JPL) Deep Space Network was hired to support MOM TTC and Navigation operations in all phases of the mission. The first nine stations in Table 5 are used in Earth-centered phase, of which the first six are ISRO network stations. The maneuver strategy is designed considering the following constraints:
-
Minimize total Mission delta-V to achieve desired Martian orbit
-
Network visibility for each Liquid Engine Burn (LEB) to the possible extent
-
Perigee stability throughout Earth bound phase
-
Limit number of passes through radiation belts in Earth bound phase
-
MOI in common visibility of Goldstone and Canberra stations
-
De-conflict with NASA’s MAVEN s/c MOI time of 2014 Sep 22, 2 UT
The desired launch time, the EPO AOP and RAAN values were worked out based on the maneuver strategy for each launch date holding the TMI date as Nov 30.
Six liquid engine burns (LEB) are planned around perigee crossings in the earth-centered phase to gradually raise the apogee of the EPO and achieve the mars transfer trajectory (MTT) with the TMI in the sixth burn on 2013 Nov 30. The impulsive maneuver strategy for launch date of Nov 5, in the Earth-centered phase, is provided in Table 6. The first Earth phase burn (EBN#1) was planned at Perigee#6 which is visible to the ISRO ground station at Mauritius. The sub-satellite latitude at perigee crossing was about 18 deg South which was close to Mauritius station latitude. The maneuver strategy was designed such that EBN#2, 3, 4 and the TMI (EBN#6) are scheduled around perigee crossings with sub-satellite longitude close to Mauritius longitude of 57 deg East, so that major part of the burn is covered by Mauritius support. EBN#5 is planned around 305 deg longitude which is visible to Cuiaba station in South America. Adequate time interval was provided between burns for orbit determination, maneuver performance evaluation and further maneuver planning and analysis.
In the TMI, the main targets were to achieve the Mars arrival trajectory with closest approach altitude of 500 km with the time of closest approach around 02:00 UT on 2014 Sep 24. A deterministic trajectory correction maneuver (TCM#1) was planned ten days after TMI, in the interplanetary cruise phase, to achieve the desired Mars arrival trajectory inclination, ascending node and argument of perigee. The Mars arrival trajectory orientation parameters were not targeted in the TMI because they called for attitude biases to be provided in the maneuver. The TMI was planned as an in-plane maneuver without any attitude biases to avoid complicating the maneuver and to minimize the effect of attitude errors during the burn on the Mars transfer trajectory. The nominal TCM#1 plan is summarized in Table 7 showing the B-plane targets corresponding to the desired Martian arrival trajectory. The Mars arrival periapsis time was targeted at 2 UT on 2014 Sep 24 to have support from two DSN stations with 70 m antenna, Goldstone and Canberra, in MOI phase. There was no conflict with MAVEN MOI time since MOM’s MOI was planned two days after MAVEN’s MOI. The MOI impulsive maneuver plan is shown in Table 8. MOI maneuver is an in-plane maneuver to reduce the s/c velocity at the arrival periapsis and capture it into a highly elliptic orbit with apoapsis altitude 80,000 km.
Backup Plans
If any Earth phase burn in the nominal maneuver strategy is missed due to any operational contingency, it has to be carried out at the next opportunity and further maneuver sequence has to be worked out considering network visibility constraint for monitoring each LEB. Backup plans were generated for the case of missing each Earth phase burn. The departure date, 2013 Nov 30, is maintained same for the case of missing any of the first five burns. It was found that there is no significant penalty in the case of missing any of the first five EBNs. In the case of missing the TMI (EBN#6), the departure date is 2013 Dec 4 which is four days later than the nominal departure date of Nov 30. The MOI date for this case is 2014 Oct 3 and MOI delta-V is higher resulting in a penalty of about 27 m/s in delta-V and 5 kg in propellant.
Maneuver Design for Different Launch Dates
The launch period is from 2013 Oct 21 to Nov 15. Maneuver strategies were generated for each launch dates over the launch period considering all the operational constraints. The no. of EBNs is six for launch dates up to Nov 11 and five EBNs are planned for later launch dates. The departure date is Nov 30 for all cases. The total mission impulsive delta-v to acquire Martian orbit varies from 2568 m/s to 2576 m/s over the launch period. The launch window along with EPO AOP requirements were provided to PSLV based on this analysis [4].
Propellant Budget
A detailed propellant budget was generated considering nominal and non-nominal mission scenarios covering following major points:
-
LEB’s and TCM’s to achieve the desired Martian orbit
-
Attitude acquisition and maintenance in all phases of the mission and attitude contingency
-
Launch dispersions, TMI error correction, case of missing nominal TMI opportunity and total delta-V variation over the launch period
-
Martian orbit maintenance for six months
-
Uncertainties in specific impulse, propellant mixture ratio and trapped/unusable propellant
Sun, Earth and Mars Characteristics in s/c Frame
The following studies were carried out to analyze the spacecraft to sun, earth and Mars characteristics in all phases of the mission for the nominal mission scenario.
-
Sun-orbit geometry in earth-centered and Mars-centric phases
-
Earth-satellite-sun angle variation in heliocentric cruise and Martian phases
-
Satellite-earth distance and signal round trip time in heliocentric and Martian orbit phases
-
Satellite-sun distance and solar intensity factor in heliocentric and Martian phases
The results of the above analyses were provided to Project, Power, Thermal and Communication subsystems for their studies and for finalizing the s/c configuration and sub-systems design. The sun-orbit geometry for the initial EPO for launch date of 2013 Nov 5, depicting the s/c roll-sun-pointing orientation and the major orbital events marked, is shown in Fig. 3. The time ticks are at ten minute intervals. The s/c orientation in the Earth orbit phase was with Roll axis pointed along Sun and Yaw axis maintained towards Earth for TTC. Two LGA’s are mounted along +Yaw and –Yaw axis to provide omni coverage during Earth orbit phase. The polarization setting required at the ground station was right hand circular polarization (RCP) for +Yaw side antenna and left hand circular polarization (LCP) for the –Yaw side one. It was decided to maintain Yaw axis towards earth so that the ground station polarization setting would be maintained as RCP. The profile of range vector direction in the s/c frame in terms of two angles, theta between the +Yaw side antenna bore axis and the range vector and phi, azimuth angle of range vector in Roll-Pitch plane measured from +Roll to –Pitch, were generated for each station visibility duration and provided to Communications engineers for their link margins assessment.

Sun-orbit geometry & orbital events in EPO for 2013 Nov 5 launch
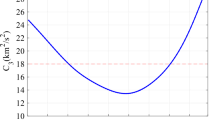
The earth-satellite-sun angle variation in heliocentric cruise phase is shown in Fig. 4. The s/c exits the Earth’s sphere of influence (SOI), at a distance of 925,000 km from the center of Earth, on 2013 Dec 3 at about 19:45 UT. The earth-sat-sun angle is about 114 deg at this point. It gradually decreases to a minimum of 14.8 deg on 2014 Mar 16 after which it increases to reach over 45 deg on 2014 Jul 6. Subsequently, it slowly decreases to over 40 deg at the time of Mars SOI entry which is on 2014 Sep 22.

Earth-satellite-sun angle in cruise phase
The satellite to earth distance variation was studied and the resulting signal round trip time variation in cruise phase is shown in Fig. 5. At the time of Mars orbit insertion, signal round trip time is about 25 min. The satellite-sun distance variation in cruise phase is shown in Fig. 6 and the solar intensity factor variation is shown in Fig. 7, which indicates that the power generation from the solar arrays will gradually decrease to less than 50% over seven months from the beginning of cruise phase.

Two-way signal travel time

Sun-satellite distance in cruise phase

Solar intensity factor
The sun-orbit geometry for the Martian Orbit, after MOI on 2014 Sep 24, is shown in Fig. 8. The variation of earth-satellite-sun angle, which is also the roll-sun angle in the nominal orientation of Martian phase, is shown in Fig. 9 for over two years in Martian orbit phase. The s/c orientation is maintained with roll-earth-pointing for communication and with sun in yaw-roll plane to maximize power generation. The High Gain Antenna (HGA), with bore axis along Roll and FOV of ± 2 deg, is used in this phase. The earth-satellite-sun angle is crossing zero over eight months after MOI in June 2015, which is the first solar conjunction for MOM. The satellite-sun distance variation was studied in Martian phase and the resulting solar intensity factor variation is shown in Fig. 10. The power generation from the solar arrays will reach a minimum of 36%, compared to the generation at 1 AU sun distance, after about 14 months after MOI in November 2015 when the satellite-sun distance is at the maximum. The satellite to earth distance variation was studied and resulting signal round trip time variation in Martian orbit phase is shown in Fig. 11. The maximum signal round trip time of over 42 min occurs about ten months after MOI, in end of July 2015.

Sun-orbit geometry in Martian orbit

Earth-satellite-sun angle

Solar intensity factor (mars phase)

2-way signal travel time
The orbit period is nearly 77 h. The variation of the Mars disc angle subtended at the s/c over an orbit was studied. Around apoapsis, mars disc angle is about 4.7 deg. Around periapsis, mars disc angle is nearly 130 deg.
MOI Burn Orientation Analysis
The sun, earth and mars directions were studied in s/c MOI orientation. The MOI burn is carried out with thrust direction (Roll) along anti-velocity vector around the periapsis point. Pitch is along trajectory normal and Yaw is towards Mars. It was found that both eclipse and occult occur in MOI phase.
The Sun-Satellite-Mars and Earth-Satellite-Mars angle profiles, along with half mars disc angle, are shown in Fig. 12. It can be observed that the Earth-Satellite-Mars angle goes below the half mars disc angle at about four minutes after burn start. This is the start time of occult, where Mars comes in the Earth to s/c line of sight, and it lasts for nearly 24 min. The Sun-Satellite-Mars angle goes below the half mars disc angle at about 6 min before burn start, which is the start of eclipse. Eclipse lasts for nearly 25 min.

Depiction of eclipse and occult events during MOI phase
The earth right ascension variation in s/c frame during MOI burn is shown in Fig. 13. It varies from about 27.4 deg at burn start to about −18.7 deg at burn end. The earth declination in s/c frame is 8.8 deg. The sun right ascension variation in s/c frame during MOI burn is shown in Fig. 14. It varies from about −13 deg at burn start to about −59 deg at burn end. The sun declination in s/c frame is 7.1 deg.

Earth R.A. in s/c frame during MOI phase

Sun R.A. in s/c frame
MOM Maneuver Strategy Realization
MOM was launched into the specified EPO perfectly by PSLV with lift-off at specified time of 09:08:26. The observed launch dispersions were well within 1-sigma of the injection accuracy specifications. Based on the pre-launch analysis, the total impulsive maneuver strategy was first designed. Six EBN’s, with TMI on 2013 Nov 30, one deterministic TCM on 2013 Dec 11 and MOI on 2014 Sep 24 were planned. The orbit determination (OD) solutions were provided by JPL Navigation team. ISRO hired JPL NAV support for OD solutions along with orbit ephemeris (OEM) files, DSN tracking measurements for ISRO OD, maneuver design validation and evaluation of Indian Deep Space Network (IDSN) tracking systems for deep space applications.
The first Earth orbit phase Liquid Engine burn (LEB), EBN#1, was planned around Perigee#6 in Mauritius (MAUR) visibility to impart a delta-V of about 137.7 m/s. The burn start of the nearly seven min burn was shifted earlier by about two minutes to schedule it fully within MAUR visibility. The effect of maneuver execution errors was analyzed. This maneuver was terminated by the set duration timer, which was as per the planned duration. The maneuver performance was very good with the realized delta-V being just about 0.2% higher than expected. All the further LEB’s were planned to be cut-off based on accelerometer accumulated delta-V reaching the uplinked desired delta-V. EBN#2 and EBN#3 were planned around Perigee#9 and #11 in the visibility of Hartebeesthoek (HBK) and MAUR and both maneuvers’ performance was good with delta-V realized as expected due to accelerometer based burn cut-off and with deviation in thrust level being within 1% from expected. EBN#4 was planned around Perigee#13 in MAUR visibility for duration of 319 s to impart a delta-V of 130 m/s. This burn got aborted due to an anomaly in the propulsion system and only 35 m/s delta-V was realized. Details on the anomaly is outside the scope of this paper. One more burn, EBN#4A was planned one revolution later to at Perigee#14 followed by EBN#5 at Perigee#16 to maintain the TMI time to achieve the desired escape trajectory. The TMI was planned on 2013 Nov 30 around Perigee#20 in the visibility of HBK, MAUR and Bangalore stations. In the TMI, the main targets were to achieve the Mars arrival trajectory with closest approach altitude of 500 km with the time of closest approach around 02:00 UT on 2014 Sep 24. The observed pitch and yaw offsets in earlier maneuvers were appropriately accounted for in the attitude steering profile for TMI to precisely realize the burn. Analysis was carried out on the impact on the Mars transfer trajectory considering specified delays in burn start, attitude errors and burn cut-off being earlier or later than nominal. The TMI maneuver operation was very smooth. The burn cut-off occurred 20.6 s earlier than expected due to an over-performance in the liquid engine thrust by 1.27% which caused a slight asymmetry in the burn around the planned burn centroid. It was also found in the maneuver performance evaluation that there was a pitch error of −0.2 deg and no significant yaw error during the burn. Due to these small deviations, the achieved Mars arrival trajectory was with periapsis altitude of about 194,450 km and arrival periapsis time two days earlier than targeted. The total delta-V imparted in the Earth Burns was about 1521.5 m/s. MOM crossed the Earth’s SOI on 2013 Dec 13 with a V_inf right ascension (RA) of 200.5 deg, declination (DEC) of 20.2 deg and magnitude 3.26 km/s.
The TCM#1 was planned ten days after TMI on 2013 Dec 11 with all eight 22 N engines. TCM#1 delta-V magnitude was 7.71 m/s which was about 5 m/s higher than in the pre-launch plan due to the small deviations in TMI operation. The TCM#1 delta-V vector was appropriately oriented in inertial frame targeting to the desired Mars arrival B-plane parameters with periapsis time of 2 UT on 2014 Sep 24. Three more slots were identified for TCM’s after discussion with JPL NAV team - TCM#2 in mid of cruise phase in April 2014, TCM#3 at MOI - 40 days and TCM#4 at MOI – 10 days. After TCM#1, the pattern of the angular momentum desaturations (AMD) on the s/c were observed over a period and the Mission Operations team came up with a model to predict the future AMD pattern till MOI. The trajectory propagation software was modified to account for the predicted AMD’s. TCM#2 was postponed to June 2014 to provide more time to NAV teams of both ISRO and JPL to complete their software modifications and validation. The post-TCM#1 predicted Mars arrival trajectory showed an impact trajectory and also the periapsis time being 65 min later than targeted on 2014 Sep 24. This was due to small errors of within 0.3 deg magnitude in TCM#1 delta-V RA and DEC and delta-V magnitude achieved being 0.03 m/s higher. TCM#2 was planned on 2014 Jun 11, using four 22 N engines, with a delta-V of 1.578 m/s, appropriately oriented, targeting to the desired Mars arrival conditions which were frozen from TCM#1 onwards. There was no communication link with the s/c in TCM#2 orientation since Roll axis, which is the thrust axis, was taken away from Earth direction to point along delta-V direction. The TCM#2 performance deviations were very small, about 11 mm/s higher in delta-V magnitude and less than 0.1 deg error in direction. The post-TCM#2 trends in Mars arrival conditions were monitored with regular orbit determination. The arrival periapsis altitude was over 200 km higher than targeted and the time was very close to targeted.
In the course of the cruise phase, Propulsion team specified that the main Liquid Engine will have to be operated in blow down mode for MOI as they had found that pressure regulation would not be possible after the long cruise period of nearly ten months. It was decided to augment the main engine with eight 22 N engines operating in off-modulation mode and this was called MOI operation Plan A. MOI simulations were carried out considering blow down and augmented mode of operation of the main engine and 8 22 N engines, using thrust and mass flow performance prediction data provided by Propulsion team and effect of performance deviations was analyzed. The minimum delta-V required to be imparted was worked out and stability analysis of capture orbit were carried out. MOI analysis was also carried out assuming no further TCM as well as considering various non-nominal arrival periapsis altitudes. The TCM#3, which was slotted around MOI-40 days, was cancelled and it was decided to perform one final TCM (called TCM#4) with the main Liquid Engine two days before MOI to test its performance before MOI. It was also decided to perform TCM#4 in the nominal Roll-Earth-pointing orientation, which was favorable, targeting mainly the arrival periapsis altitude to 513 km, without loss of communication.
The nominal plan A MOI execution commands sequence was uploaded to the spacecraft ten days before MOI assuming nominal performance of the TCM#4 which was scheduled 41 h before MOI. Contingency maneuver design studies were done to correct for effects of unplanned thruster firings due to any s/c contingency occurring after MOI sequence uplink. In preparation for a contingency case of failure of the main engine, MOI design and analysis was done considering only the eight 22 N engines in blow down mode of operation, which was called MOI operation Plan B. MOI strategy for Plan B was finalized after optimizing the burn arc to get maximum energy change for the delta-V imparted and propellant spent, maintaining the minimum altitude during the burn above 150 km. Some interesting closed orbits with varying stability were found to be achievable for this case. To everyone’s delight, the main engine performed flawlessly when it was fired for nearly 4 s for the final TCM at 9 UT on 2014 Sep 22. Mars orbit insertion was executed as per the uploaded sequence around 2 UT on 2014 Sep 24 and MOM was captured into the desired Martian orbit with periapsis altitude of 419 km, apoapsis altitude of 76,872 km and inclination of 150 deg. The MOM maneuver strategy realization is summarized in Table 9. The total delta-V was slightly more than the launch window results due to impulsive to finite maneuver realization.
Conclusion
The Mars Orbiter Mission design and detailed analysis of nominal and various non-nominal scenarios was carried out. For accomplishing this, new software tools were designed and developed for interplanetary trajectory design, maneuver strategy design and mission profile analysis. The launch window and initial EPO requirements were provided to PSLV to minimize the delta-V cost of the mission. Based on the mission analysis, inputs were provided for finalizing the s/c subsystems design and configuration. The target Martian orbit was selected to meet all the platform and payload constraints. After a perfect launch by PSLV, all the orbit maneuvers meticulously planned and MOM was placed into the desired Martian orbit, achieving the challenging technological objective of the mission in India’s first interplanetary endeavor.
References
Sergeyevsky, A. B., Snyder, G. C., & Cunniff, R. A. (1983). Interplanetary mission design handbook. Volume 1, part 2: Earth to Mars ballistic mission opportunities, 1990-2005
Vallado, D.A.: Fundamentals of Astrodynamics and Applications. Microcosm, Hawthorne (2001)
Carrou, J.P.: Spaceflight Dynamics. Cepadues Editions, Toulouse (1995)
Kiran, B.S., Negi, K., Singh, S.K. et al.: Flight dynamics & mission analysis for Mars Orbiter Mission (Internal Report). ISRO-ISAC-MOM-0979 (2012)
Kiran, B.S., Negi, K., et al.: Target Martian Orbit selection for ISRO Mars Orbiter Mission 67th International Astronautical Congress (IAC), Guadalajara, Mexico, 26–30 September 2016
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Negi, K., Kiran, B.S. & Singh, S.K. Mission Design and Analysis for Mars Orbiter Mission. J Astronaut Sci 67, 932–949 (2020). https://doi.org/10.1007/s40295-019-00199-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40295-019-00199-8