
Abstract
This paper studies karst cave and soil cavity development in the process of karst collapse as a means of disaster prevention and control. Using the karst area of the Shandong section of the Beijing–Shanghai high-speed railway as a test area, a numerical simulation method is presented as well as the model test to study the characteristics of typical radar images of different types of karst caves and soil cavities. By combining theoretical analysis with field test results, the method and characteristic standards for nondestructive testing using ground-penetrating radar to determine the grouting effect on a karst roadbed are given. The radar spectrum characteristics are analyzed for a cave, water-filled cave, clay-filled cave, karst cave with dense grouting and karst cave with grouting that is not dense. Comprehensive analysis of the results of indoor model testing and numerical analysis, combined with the engineering practice of evaluating the effect of grouting treatment in the selected section of the Beijing–Shanghai high-speed railway, clarifies the basic characteristics of map recognition of radar detection of karst grouting. The morphological characteristics of the karst caves in the geological radar images are usually composed of many hyperbolic strong reflection waves. Multiple-reflection wave groups of high amplitude, low frequency, and equal distance indicate the side wall of the cave. The bottom interface of the cave is not obvious, although when the bottom part of the cave is filled with water or clay, silt, sand and gravel material. The bottom of the reflection wave will be enhanced. When the cave is filled with material, the electromagnetic wave energy decays rapidly, the high-frequency part is absorbed, and the reflection is mostly low frequency wave. The characteristics of radar images of the slurry distribution area are obvious in the grouting zone. A horizontal direction results in arc-shaped distribution, and a vertical direction has more regular distribution. The results of the study are helpful in the exploration of karst caves and soil caves, and the evaluation of the effect of grouting treatment in mitigating karst collapse.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Karst collapse is a geological process in which the rock and soil above a karst cave deform or breakdown as a result of natural or manmade activities and collapse to form a pit or hole in the ground. Karst collapse is divided into two types: bedrock collapse and overlying soil layer collapse. The former refers to the collapse of the bedrock roof of a rock cave; the latter refers to the collapse of loose materials that overlay the rock cave. Karst collapse can result from many factors, such as a decline in the groundwater level, vibration load and other factors that lead from the development of a karst cave and contribute to expansion until the roof collapses, resulting in karst collapse (Galve et al. 2012; Mingtang et al. 2000; Zheng 2010).
Extensive research and production practice has been carried out domestically and internationally in the field of karst disaster detection. Yee proposed finite-difference time-domain (FDTD) as a new method for numerical computation of electromagnetic fields. Renhai Li and other scholars published related articles, and discussed the application of geological radar in karst collapse detection (Liu et al. 2011). A significant amount of drilling verification has confirmed that ground-penetrating radar, which has been widely used in the field of engineering as a very effective method of nondestructive testing, has a high detection accuracy and is also able to reach depths that can meet the demand of many engineering constructions (Guo 2009; Jiang et al. 2008).
In this paper, numerical simulation and model testing are used to study the typical radar characteristics of a karst cave and a soil cavity in the process of karst collapse. Based on theoretical analysis and field testing, the evaluation method for the effectiveness of grouting treatment of the karst subgrade section is established. The results of the study are helpful in the exploration of karst caves and soil caves, and in evaluation of the effect of grouting in the treatment of karst collapse.
Model and simulation
Theoretical analysis
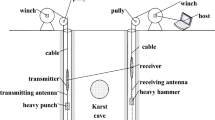
As a geophysical testing method, ground-penetrating radar (GPR for short) has been widely used in the field of engineering and with great effectiveness. The working principle of geological radar is to transmit a high-frequency electromagnetic wave (T) and receive echo electromagnetic wave (R) to accurately describe the underground structure. Figure 1 is a schematic diagram of how geological radar work.

Schematic of geological radar
Radar-transmitting antenna T transmits a high-frequency electromagnetic wave signal (20 MHz–2 GHz). When confronted with an electrical differential interface (dielectric constant, conductivity, permeability), the electromagnetic wave signal reflects and at the distance X, the reflected wave signal is received by antenna R. The electromagnetic wave’s effective travel time is (Wang 2007):
where t is the electromagnetic wave two-way travel time (TWT) (ns), V is the propagation velocity of electromagnetic wave in medium (m/ns), H is the depth (m) of the target body and X is the distance between the antennae (m). The velocity of electromagnetic wave V and dielectric constant ε have the following relations (Wang 2007):
At present, the dielectric constant is calculated using three methods: the radar signal amplitude reflection coefficient method, the wave velocity analysis method and the inversion method. Because the radar data include travel time information, X information and the information for the dielectric constant, the position and depth of the target body can be indirectly obtained. The excited source wavelet used in this experiment is the modulated Gaussian pulse source. In addition, the frequency of the electromagnetic wave is directly related to the detection of depth and resolution. Based on different requirements for depth detection and accuracy, a different center frequency must be used. The selection of the radar’s center frequency is controlled mainly by the resolution (Wang 2007):
where f is the radar’s center frequency and S the spatial resolution that must be achieved. Second, taking into account the skin effect of electromagnetic waves and the ground’s absorption of higher frequency radar waves, combined with empirical parameters, the ideal setting for the probe in railway subgrade in general is 80 MHz. The forward modeling of the electromagnetic wave signal is based on Maxwell’s theory of electromagnetic waves. The Maxwell equation group is (Wang 2007):
where t is the time (s), qv is the voltage density (C/m3), E is the electric field strength and H is the magnetic field strength. Forward modeling of the radar (GPR) electromagnetic wave signal is achieved using the finite-difference method to solve the Maxwell equation.
A two-dimensional finite-difference algorithm is used to divide the (x–z) plane (Fig. 2). In the diagram, the lower left indicates grid origin (0, 0) and the grid is set to the minimum partition (Δx–Δz). The electromagnetic field components of different positions in (x–z) space are, respectively:

Finite-difference schematic
where EZ, HX and HY are the different values of the electric field and the magnetic field.
Karst cave simulation
Calculation model and parameter selection
The calculation model is based on the Jinan section of the Beijing–Shanghai high-speed railway subgrade: DIK422 + 350~DK429 + 550. The strata in this section from top to bottom are Qapl in Quaternary Upper Pleistocene Series (Q3al + pl), Qdpl in Quaternary Mid-Pleistocene Series (Q2dl + pl), Lower Ordovician(O1) limestone, mud limestone, Upper Cambrian (ϵ3) shale, Middle Cambrian (ϵ2) limestone and Yanshan period diorite (δ5). In these strata, the limestone is gray green, has a cryptocrystalline texture and oolitic structure, and is thick bedded and weakly weathered. The dissolution is serious, and karst cave and karst trough have developed. Part of the karst cave and dissolution cutter is filled with clay, gravel soil and water. The cave diameter is generally between 0.1 and 6.4 m, and the maximum diameter of the air-filled cave is 3.3 m. Geophysical exploration results show that the limestone dissolution above 20 m depth is serious. In a part of the section, the corrosion severity is below 10 m depth.
Considering underground water level, karst development types and the rules of the Beijing–Shanghai high-speed railway subgrade, five kinds of geophysical simulation models are established: the air-filled cave, the water-filled cave, the clay-filled cave, the karst cave filled with dense grout and the karst cave filled with non-dense grout. Specific parameters of the models are shown in Table 1. Figure 3 is a schematic diagram of the geophysical model corresponding to the different types of karst model. Each model is divided into three layers: sandy clay, clay and limestone. The five models above are shown in order from top to bottom. To highlight the radar image characteristics of karst cave, the model is simplified that the limestone is homogeneous, and the underground water and the soil are considered as an integrity with a higher relative dielectric constant (Ren 2012).

Cave schematic geological model
Radar response characteristics of karst cave
A complete simulation section (Fig. 4) is obtained using a GPR simulation of the karst roadbed of the Beijing–Shanghai high-speed railway. The map shows the cave area identified in the radar simulation, with data in gray (left) and wiggle (right). In Fig. 4a, the fact that the radar reflected wave was in the same phase and the formation was at a consistent, continuous level indicates there is no curve reflection in the bedrock area, reflecting energy balance. Figure 4b shows the cave has regionalized characteristics, specifically, a strong electromagnetic wave reflection at the top of the cavity, and then the radar wave is pulled back in the cavity and forms a cross-shaped reflection signal that results from the air in middle of the cave. The internal reflection energy is strong. Figure 4c shows the characteristics of an electromagnetic wave in a water-filled cavity. The reflection signal at the top of the cavity becomes weak and a small arc develops. Because water absorbs the electromagnetic wave, the reflection of the electromagnetic wave inside the cavity gradually fades. The signal is without clutter and crossing, with multiple low-strength reflection phenomena. In Fig. 4d, which depicts a cavity filled with clay, the reflection signal is further reduced. The internal reflection signal becomes weak, and the multiple reflections are reduced. Figure 4e shows the electromagnetic wave reflection effect diagram of a cave with dense grouting. With the exception of the weak reflection signal that appears at the boundary of cave, there is almost no signal reflection in the cavity. Figure 4f shows the radar simulation of a cave in which the grouting is not dense. Its characteristics are similar to those of the cave with dense grouting, which can be accurately determined by the amplitude and frequency.


Different types of void filling simulation renderings
To describe the characteristics of the cavity more accurately, we conducted amplitude spectrum analysis of the radar simulation charts for different types of cavity filling. Figure 5 shows the numerical simulation of electromagnetic waves for different types of filling material. As illustrated, the reflection amplitude of the air-filled cave is strongest, and the time difference between the top and bottom reflection signals is lowest. The reflection energy at the top and bottom of the soil-filled cave is lower compared to the water-filled cave. An analog can be found in the amplitude diagram of the reflection signal amplitude at the top and bottom of the cave with less dense grouting, which is obviously stronger than that of the cave with dense grouting, but the reflection amplitude signal remains relatively weak, although the internal reflection signal is relatively clean compared to the clay-filled cave.

Different types of analog amplitude cave
Analysis of the radar signal spectrum overcomes the error caused by solely visual observation. The air-filled cave shows a strong top and bottom reflection radar signal (Fig. 6). The bottom reflection signal of a water-filled cave is weakened, and the top signal appears stronger and disorderly. The spectrum signal of a clay-filled cave is more regular, and returns a simple two-reflection signal. Spectral attenuation for the cave with dense grouting is small and the signal is more uniform. When the grouting in the cave is not dense, a simple multiple-wave reflection phenomenon appears in the cavity region, and the signal spectrum remains characteristically wide.

Analysis of the electromagnetic spectrum of different types of cave
Physical modeling of soil cavity
To ensure the similarity of the physical model to the geological model, field sampling was conducted to determine the karst geological structure of the test area. Soil was then brought to the laboratory for manual preparation in which it was compacted by layers to ensure that particle size distribution, water content and density of the physical model were similar to the test area soil.
This model test mainly had the following purposes:
-
1.
Collect the typical geological radar profile images of the experimental model and study the characteristics of the geological radar image of the underlying soil cave.
-
2.
Study the reflection signal based on the response of PVC pipe with different diameters and depth to the receiving signal of the geological radar to determine the accuracy and resolution of ground-penetrating radar detection.
-
3.
Analyze the influence of the acquisition parameters for the radar image by comparing those parameters with and identifying differences from the geological radar image of the same anomaly area.
-
4.
Summarize rules for the identification of the geological radar image that are used to guide the actual project by comparing the geological radar images obtained by the model test with the actual profile of the model.
Test model
A 1 m × 1.5 m × 1 m wooden box was designed with different depths of soil inside. Sections of 0.5-m-long PVC tube with diameters of 5 cm and 10 cm were used to carry out testing (Fig. 7). The following experimental models were designed to simulate the soil cave.

Test instruments and equipment
The sections of PVC tube were used to replace the soil hole, and were arranged in soil parallel to the transverse direction. The PVC tube port sealed to prevent soil from entering the tubes and impacting the test results. The geometric model of the indoor test is shown in Fig. 8.

Schematic of the cave model
Within the depth of 1 m, the 900M antenna has a higher resolution than 400M antenna, so in the range of 15 ns, the 900M antenna can accurately reflect the actual situation of the internal model.
Test results analysis/processing
The results of the analysis of the geological radar image for the cavity model (Fig. 9) are as follows:

Empty model radar image
-
1.
Because the dielectric constant of air is zero, it differs greatly from the dielectric constant of the surrounding medium. In the interface of cave and soil, obvious reflection anomalies exist in the radar profiles and waveforms. Also, because of the differences of the cave area size, with greater burial depth, the reflection signal in the profile increases when the cavity size increases.
-
2.
As shown in the figure, the reflected signal and the boundary diffraction are overlaid at the bottom of the cave, which results in the inflection point in the profile. Therefore, the position of the turning point can be used to identify the bottom reflection signal.
-
3.
The dielectric difference between the cave area and the surrounding medium results in the existence of a hole boundary phenomenon in the electromagnetic wave diffraction. Therefore, the actual range of cave can be inferred from the size of the diffraction wave.
Field test and standard of evaluation method of grouting effect detection
Radar image recognition before and after grouting treatment
Numerical simulation was carried out to evaluate the differences in radar images obtained before and after grouting in a karst cave. Although the geological condition of the test section can be found in the survey report and drilling test, it is difficult to know the exact size and location of the cave, the distribution characteristics of the slurry after grouting and how dense the grouting is. The most intuitive and persuasive analysis of radar imagery is to find a karst cave that can be observed, carry out grouting, and then test radar images obtained before and after filling. The advantage of this test is that it allows for observation of the shape and size of the karst cave, and slurry distribution and solidification, all of which increase the reliability of the analysis results.
A cave in the test area with a relatively ideal shape, location and wiring environment was selected to carry out the test. The cave is approximately oval with width of 0.8 m, depth of 1.2 m and height of about 1.0 m. The diameter of the opening is about 0.25 m and the depth of the cave is about 2 m. The upper part is cultivated land and the ground is flat. From the ground, 0–1.5 m is the silty clay and the limestone is below 1.5 m, the jointed joints of the rock mass are developed, and the weathering is more serious. The depth to groundwater table is 6.1 m. The effect before and after grouting is shown in Fig. 10. Taking the karst cave as research object, detection was carried out from upper part. The antenna frequency is 400 MHz and the dot spacing is 0.5 m. Test results are shown in Fig. 11.

The grouting effect of karst cave before and after grouting

Radar image before and after grouting
Comparison of the radar images before and after grouting, combined with the results of typical radar images obtained from the previously conducted numerical simulation, leads to a better understanding of the differences in the radar images obtained before and after grouting.
-
1.
Before grouting, the radar image aligned with typical karst cave image characteristics embodied in the strip reflection on the left and right sides of the karst cave, which are curved horizontally, indicating the karst cave is hyperbolic.
-
2.
After grouting, the radar image of the cave does not show the hyperbolic reflection groups typical of karst caves, nor does it shown any obvious differences from the surrounding medium. Furthermore, the brightness of the image is entirely abnormal, which shows that the radar image of a well-filled cave is similar to that of intact limestone.
Analysis method of grouting effect evaluation
The results of field testing, indoor simulation testing and model testing provide an evaluation index and standard system for radar detection analysis of the effect of grouting as a treatment for avoiding karst collapse (Chen 2014).
The grouting effect can be evaluated from the following aspects based on radar image analysis:
-
1.
The grouting effect of using different directions should generally be evaluated from two aspects, namely horizontal (shallow) and vertical (deep).
-
2.
The grouting effect of using different medium layers generally requires assessing the subcover soil layer and the underlying rock layer.
Radar detection technology is still under development, and its accuracy needs to be further improved. The results of the analysis are still more complex; therefore, the data presented here represent qualitative research only, and is mainly divided into two categories, namely whether the effect of grouting is good and poor.
Since good and poor have no significant quantitative indicators, the preliminary classification criteria are as follows:
Good The grouting effect has reached our expected goal by meeting or exceeding the design requirements.
Poor The grouting effect has not reached our expected goal by failing to meet the design requirements.
To understand the differences between the radar image characteristics from the above two aspects, we will take the experimental section of the radar image as an example to be analyzed, and then expand on that analysis to obtain the corresponding evaluation standard.
-
1.
Radar image features of horizontal and vertical depth
The geological conditions of the section are as follows: 0–7.0 m below the surface layer is yellow brown and hard plastic silty clay. The lower part is weathered limestone in green gray. The karst cave is moderately developed in this section. The karst caves appear after 2.5–4.5 m of the rock stratum as bead-shaped type, and the karst hole rate is 47%. The depth to groundwater table ranged from approximately 3 to 5 m.
Uniformity of grouting effect in the horizontal direction The left side in Fig. 12 shows a phase axis waveform that is regularly and uniformly distributed, and has no obvious chaotic reflection and scattering region, suggesting that the slurry distribution is uniform, indicating good grouting effect. The mark on the right shows a waveform indicating phase axis disorder and the emergence of wide range of irregular region, suggesting uneven horizontal distribution of slurry resulting in poor grouting effect.

Radar image comparison of horizontal grouting reinforcement effect
Uniformity of grouting effect in the vertical direction Figure 13 is the radar image of two adjacent holes after grouting. The phase axis waveform of hole 1 shows the waveform distribution is uniform from top to bottom, and there is little change in the reflection energy, which indicates that the slurry achieved good grouting. In the vertical direction, the phase axis waveform of hole 2 is unevenly distributed and the reflection wave energy gradually decreases from top to bottom, which indicates that slurry distribution was not uniform, so the grouting effect is poor.

Radar image comparison of vertical grouting reinforcement effect
-
2.
Characteristics of radar images in soil and rock
Uniformity of grouting effect in soil layer Figure 14 is a radar image of a measuring line in the middle of which the phase axes are mainly in strip, vein and dendritic distribution. The interface shows small periods and large amplitudes, which indicate that the grouting effect is good. The mark in the figure shows no such feature, which means that the slurry is not evenly distributed and the grouting effect is poor.

Radar image contrast of slurry distribution uniformity within the soil layer
Uniformity of grouting effect in rock strata As shown in the right lower part of Fig. 15, energy clusters are distributed evenly and a strong reflective light stripe exists only in part. The energy attenuation is relatively slow, and the detection distance is deep and with strong regularity. Low-amplitude reflection wave groups form frequently, and the waveform is evenly distributed and without clutter, and the automatic gain gradient is small, leading to the conclusion that the grouting effect is good. The left lower part of the figure shows the following characteristics: the phase axis and wave clutter, with great period and amplitude. At the same time, strong interference, scattering and diffraction phenomena indicate a fracture zone, and the grouting effect is poor.

Radar image contrast of slurry distribution uniformity within the rock stratum
Grouting effect detection and evaluation standard
Based on the above research results, the grouting effect evaluation system (Table 2) is established, which has great significance and reference value for guiding similar projects in the future.
Conclusions
Based on numerical simulation and model testing, and according to the characteristics of the radar detection image of karst caves and soil caves and analysis indexes, an identification standard is established. Combined with the field test results, the identification index system and the characteristic standard of the radar detection of shallow buried karst cave are established. Specific conclusions are as follows:
-
1.
According to the radar image reflection wave group, the phase axis, waveform and other features, the location and size of karst caves and intact limestone can be determined. The radar images and waveform characteristics of karst caves are usually expressed as followed: the morphological characteristics of the karst caves in the geological radar images are usually composed of many hyperbolic strong reflection waves. Multiple reflective wave groups of high amplitude, low frequency and equal interval indicate intact limestone. The reflection wave is stronger when the cave is empty or filled with water.
-
2.
According to the diffraction phenomena of electromagnetic waves in the radar image, the location and scale characteristics of shallow soil caves can be determined. These characteristics are embodied in the following aspects: in the interface of cave and soil, there are obvious reflection anomalies in radar profiles and waveforms. Also, differences in the cave area size determined using greater burial depth show that the reflection signal in the profile increases as the cavity size increases. At the bottom of the cave, the reflected signal and the boundary diffraction are overlaid at the bottom of the cave, which results in the inflection point in the profile. Therefore, the position of the turning point can be used to identify the bottom reflection signal. Finally, the dielectric difference between the cave area and the surrounding medium results in the existence of a hole boundary phenomenon in the electromagnetic wave diffraction. Therefore, the actual range of cave can be inferred from the size of the diffraction wave.
-
3.
The radar image of an area with good grouting effect has characteristics similar to those of intact rock strata, whereas the radar image of an area with poor grouting effect shows a more chaotic waveform. This difference makes it possible to judge the distribution of the underground medium after the grouting treatment.
-
4.
The characteristics of radar images of the slurry distribution area are obvious in the grouting zone. A horizontal direction results in arc-shaped distribution, and a vertical direction has more regular distribution. There is an association between the reflection wave phase axis and the distribution of the underground slurry, such that a strong reflection wave phase axis occurs in the area with good slurry distribution, while the area with poor slurry distribution shows an absence of a strong reflection wave in the larger area.
References
Chen Z (2014) Model test on grouting quality detection of karst subgrade by high density resistivity method. Southwest Jiaotong University
Galve JP, Guerrero J, Alonso J, Diego I (2012) Optimizing the application of geosynthetics to roads in sinkhole-prone areas on the basis of hazard models and cost-benefit analyses. Geotext Geomembr 34:80–92
Guo M (2009) Technology research on real-time monitoring for treatment effect of karst geological conditions in Beijing-Shanghai High-speed Railway. Beijing Jiaotong University
Jiang X, Lei M, Gu W, Zhang M (2008) Soil cave monitoring and sinkhole prediction in linear engineering: summarization. Carsol Sin 2:172–176
Liu K, Liu H, Pei J (2011) GPR simulation analysis of karst collapse. Chin J Eng Geophys 8(3):334–338
Mingtang L, Xiaozhen J, Yu L, Zhou L (2000) The risk assessment of karst collapse in urban area—a case study in Liupanshui, Guizhou, China. Chin J Geol Hazard Control 4:26–30
Ren X (2012) Study on grouting detection method and assessment indicators of karst roadbed grouting effect in Nanning-Guangzhou Railway. Southwest Jiaotong University
Wang M (2007) Research on forward numerical simulation and indoor experiment of GPR in highway tunnel lining. Tongji University
Zheng X (2010) Research on genetic mechanism and risk evaluation of karst collapse in Guanghua Basin. Central South University
Acknowledgements
This work was supported by the Natural Science Foundation (Grant No. 41672339).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is a part of the Topical Collection in Environmental Earth Sciences on Karst Hydrogeology: Advances in Karst Collapse Studies, edited by Dr. Zhou Wanfang.
Rights and permissions
About this article

Cite this article
Bai, M., Chen, Y., Wang, C. et al. Radar spectral analysis and evaluation of the effect of grouting treatment in karst caves and soil caves. Environ Earth Sci 77, 795 (2018). https://doi.org/10.1007/s12665-018-7980-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12665-018-7980-7