
Abstract
With the availability of very high resolution multispectral imagery, it is possible to identify small features in urban environment. Because of the multiscale feature and diverse composition of land cover types found within the urban environment, the production of accurate urban land cover maps from high resolution satellite imagery is a difficult task. This paper demonstrates the potential of 8 bands capability of World View 2 satellite for better automated feature extraction and discrimination studies. Multiresolution segmentation and object based classification techniques were then applied for discrimination of urban and vegetation features in a part of Dehradun, Uttarakhand, India. The study demonstrates that scale, colour, shape, compactness and smoothness have a significant influence on the quality of image objects achieved, which in turn governs the classified result. The object oriented analysis is a valid approach for analyzing high spatial and spectral resolution images. World View 2 imagery with its rich spatial and spectral information content has very high potential for discrimination of the less varied varieties of vegetation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The last decade has seen a rush of high spatial resolution satellites with spatial resolutions varying from 5.8 m (LISS–IV, IRS P-6) to 0.6 m (Quickbird PAN). Much of the focus on earth observation missions had been on improving the spatial and the radiometric resolutions, with the radiometry improving up to 11 bits. The spectral resolution in all these cases was limited to 3/4 broader bands of multispectral data. It can be said that spectral resolution of conventional multi-spectral satellite imagery finds the limitations in terms of number and contiguity of bands. To overcome this limitation new instruments that could collect numerous bands in precisely defined spectral regions were developed leading to satellite hyper spectral remote sensing. The limitation again in these cases was the low spatial resolution. Due to enormous volume of data in this case, issues related to data redundancy, dimensionality reduction and processing techniques emerged. The need of the hour was a high spatial, high spectral and high radiometric resolution satellite sensor giving the best of the three worlds. To rescue came with the launch of World view −2 satellite on 8th October 2009 with 8-band capability in Coastal Blue, Blue, Green, Yellow, Red, Red Edge and two bands in Near-Infrared at 2.0 m high spatial resolution, a higher spatial panchromatic resolution of 0.5 m (resampled) at 11 bits of radiometry. Most of the studies on discrimination of vegetation species and urban types have been carried out using airborne hyper spectral data. The conventional method that was employed in these cases was using the images that were acquired by airborne hyper spectral scanner system and a spectral library was created from field/laboratory spectro-radiometer data to detect patterns of spectral response potentially for discriminating mineral building surfaces and synthetic material (Moreira and Galvão 2010).
With the availability of very high spatial resolution multispectral imagery from sensors like IKONOS (1 m PAN, 4 m Multispectral 4 spectral bands) and Quickbird, (0.6 m PAN, 2.4 m Multispectral 4 spectral bands) it is possible to find urban features and trees in an urban environment. For high resolution image processing object based methods are widely applied and accepted. Previous work done using the above methods mainly compared the accuracy improvement on pixel based classification by object based classification (Gao et al. 2006; Luyao and Ling 2008; Kumar 2009; Gao et al. 2011). Because of the diverse composition of features in an urban environment, extracting urban features from high resolution imagery is a difficult task. In urban area, previous work focused on extracting either buildings (Kumar 2009) or roads (Kumar et.al. 2008) or boundaries (Kumar et. al. 2009, Tiwari et al. 2009) where high resolution image was segmented and classified to obtain requisite buildings (Kumar and Shrivastava 2009) and roads. Peijun Li (2010) proposed hierarchical segmentation using shape descriptors for multilevel object based classification. Detailed vegetation map production using object based technique was demonstrated by Mathieu et al. (2007). De Kok et al. (1999) used object oriented approach using texture analysis to extract different forest types. Shreshtra (2003), compared the forest type extraction using multi resolution data ranging from IKONOS PAN and multispectral merged (1 m), LISS III and PAN merged (5.8 m), ETM PAN and multispectral merged(15 m) where he claimed that more forest types could be interpreted on IKONOS than on other resolution images. In all of the above studies high spatial resolution image in 4 spectral bands was used. Small features could be identified due to high spatial resolution but species discrimination and material identification is hindered due to limited spectral information. In this study an attempt has been made to utilize the high spatial and spectral information content available in the imagery from World View −2 to discriminate between forest species and urban building material in an urban environment.
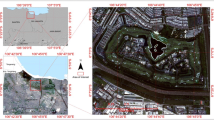
Study Area and Data Used
The study area chosen for this project is Dehradun (30° 19' N latitude and 78° 20' E longitude), which is the capital of Uttarakhand state of India. The Dehradun city is situated in the southern part of the Uttarakhand state and bounds of city has grown beyond Rispana Rao and Bindal Rao on the east and west respectively, Himalayan ranges on the north and Sal (Shorea Robusta) forest in the south. The test site 3.58 km2 is located between geographic extent of 30° 19' 58" N to 30° 20' 46 " N (latitude) and 77° 59' 30" E to 78° 0' 57" E (longitude). The test site, a part of Forest Research Institute (FRI) was selected because of the wide diversity of known vegetation types and different building material types present.
WorldView-2 is Digital Globe’s second next-generation 8-Band Multispectral Satellite was launched on 8 October 2009. It is a satellite with high spatial and high spectral resolution. It captures 46 cm (resampled to 50 cm) panchromatic imagery, and is the first commercial satellite to provide 1.84 m resolution (resampled to 2.0 m), 8-band multispectral imagery. The high spatial resolution enables the discrimination of fine details, like vehicles, shallow reefs and even individual trees in an orchard, and the high spectral resolution provides detailed information on such diverse areas as the quality of the road surfaces, the depth of the ocean, and the health of plants. (www.digitalglobe.com). The characteristics of the satellite is summarized in Table 1. An ortho rectified image of Dehradun, Uttarakhand, India acquired by World View −2 on 26th April 2010 was used to explore the potential of four new bands introduced in high resolution imagery.
Methodology
The image was checked for accuracy at three points, for which the Ground control points were acquired by Differential GPS technique. The RMS error at three points was 1.58 pixel, 2.62 pixel and 3.9 pixel respectively with an average RMS error of 2.69 pixels. The single band panchromatic imagery and the 8 band multispectral imagery were preprocessed in two steps. In the first step raw digital numbers were converted to radiances and subsequently the radiance values were converted to top of atmospheric reflectance.
Conversion to Top-of-Atmosphere Reflectance
For analyzing data in multispectral domain, it is common practice to convert multispectral data into reflectance before performing the analysis. It is important when the goal is to produce accurate spectral signatures of species level classification. Therefore, the image was processed to convert the digital numbers (DN) to the top-of-atmosphere (TOA) reflectance. The shape of the top-of-atmosphere spectral radiance curves, as a function of wavelength, is dominated by the shape of the solar curve. The conversion method is adapted from Updike and Comp (2010). The DN’s of both panchromatic and multispectral image were converted to TOA Reflectance values. The multispectral TOA reflectance image (2.0 m) was fused with TOA reflectance panchromatic image (0.5 m) using Gram Schmidt (GS) orthogonalization technique to obtain an 8 band multispectral band at 0.5 m spatial resolution. The GS technique was preferred over others owing to the property that all the 8 bands are used as compared to three bands in other cases. Even though the spatial resolution of multispectral bands of world view 2 is high (2.0 m), the fusion was carried out to utilize the detailed textural information present in Panchromatic Band at 0.5 m spatial resolution. The spectral signatures along dominant vegetation types and different urban structures in the study area have been obtained using merged TOA reflectance image.
Multiresolution Segmentation and fuzzy Classification
The first step in object-based classification is to segment the image into homogenous, non overlapping regions of related content. The image was segmented using a multi-resolution segmentation approach which is a bottom-up region merging technique starting with one-pixel objects. In numerous iterative steps, smaller image objects are merged into bigger ones. Throughout the segmentation procedure, the whole image is segmented and image objects are generated based upon several adjustable criteria of homogeneity or heterogeneity in color and shape. The outcome of the segmentation algorithm is controlled by a scale factor and a heterogeneity criterion. Scale parameter indirectly influences the average object size, which determines the maximal allowed heterogeneity of the objects that may occur when merging of two image objects. The heterogeneity criterion includes two mutually exclusive properties: colour and shape. Colour refers to the spectral homogeneity whereas shape considers the semantic characteristics of the objects. Shape is divided into two equally exclusive properties: smoothness and compactness. A pixel neighborhood function may be used to determine whether an image object should be grown or whether a new image object should be created. The user specifies the spectral and spatial shape parameters (compactness and smoothness) criteria and the neighborhood function logic. Once a segment patch exceeds the user-specified parameters, it stops growing. The final result is a new segmented image consisting of image objects that contain relatively homogeneous spectral and spatial characteristics (Baatz and Schape 1999).
Results and Discussion
Visual Interpretation and Feature Identification
Using reflectance values there is a possibility to better balance colour when a colour composite is created for visualization purposes. Figure 1 illustrates the composite NIR2, Red egde and Yellow. Very Good enhancement of vegetation cover and different species is obtained in this composite. It shows different shades of hues for specially aiding vegetation species identification and discrimination. Individual trees are well distinguished within a residential area; their various colours clearly indicated the possibility to identify tree species. The true colour composite and the standard FCC aid in urban roof material and road type discrimination. The high spatial resolution helps in identification individual tree crowns and building roofs types and different road materials.

False Colour Composite (8-NIR,6- Red Edge,4-Yellow)
Reflectance Profile and Signature Extraction
The spectral profile along dominant vegetation types and different urban structures (roads and building roofs) in the study area was obtained. The graph of world view reflectance profile (Fig. 2) illustrates that the maximum slope exists between red edge and the red band and between Yellow and red band for different tree types. Hence it was expected that computing ratios of these bands will highlight the different vegetation presents in the area. Reflectance profile along different building roofs (Fig. 3) indicate that all building roof types can be extracted .

Spectral Reflectance profile along different vegetation species

Spectral Reflectance profile along different building types
Image Classification Based on Object Oriented Image Analysis
The basic element of an object oriented approach is the image object or segment not single pixel . The first step in object-based classification is to segment the image into homogenous, non overlapping regions of related content. The image was segmented using a multi-resolution segmentation approach. The selection of the optimum scale parameter and heterogeneity criteria depends on the spectral and spatial resolution of the data and the nature of the features to be extracted. They are determined using a iterative approach with different parameters and by the visually comparing how well the segmented image objects match the feature boundaries in the image. For this reason a multilevel hierarchical image segmentation was carried out on seven different scale factors suitable for extracting urban and vegetation features in the study area. Since there are eight layers in the data and the spatial resolution is very high, colour as well as shape plays an important role. Once an appropriate scale factor was identified, the colour and shape criterion were modified again to refine the shape of the image objects. Once suitable parameters are identified, the pixels having a homogeneous pattern are grouped into image objects. For the study area, the image was segmented in seven different levels with scale parameters ranging from 80 with an increment of 20 with a constant shape factor of 0.3, compactness and smoothness of 0.1 and 0.9 respectively. Different image objects have different spectral, shape, and hierarchical characteristics. The image was classified based on Fuzzy supervised classification.
Segmentation Parameter Quality
The accuracy of the classified result depends on the correct identification of the homogenous image objects and the image object identification depends on segmentation parameters like scale, colour, shape- compactness and smoothness. Choosing these parameters mainly depend on visual discrimination of the image segments. The low scale parameter resulted in very small segments where one object is broken down into many small segments. Hence a low scale parameter results in over segmentation. A high scale parameter results in more general segments and more than one object is generalized resulting in under segmentation of the image. It was observed that the vegetation objects and urban features were well defined at Level 5 with a scale parameter of 160 and which was used for further image analysis.
Feature Space Selection
The standard pixel based classifiers have a well defined and limited feature space, mainly consisting of original satellite data. However, the feature space in object oriented method can consider a wide range of variables like layer values, shape descriptors, textures and hierarchy. Hence difficulty arises in selecting the features which express the essential character of a class. Selecting optimum features for class description is also crucial task as increasing the number of features increase the computation time. It is often said that performance of a classifier can be improved by adding additional features. The performance does improve upto a certain point as additional features are added and then after a limit it deteriorates, which has been defined as curse of dimensionality or Hughes phenomenon. (Hughes, 1968 & Alonso et al. 2011) Hence each class should be described with minimum number of features as possible. It was observed that while using 4 bands, shape and texture descriptors are useful to identify different tree species, in comparison when using the 8 bands the need for complex feature is limited resulting in reduced computation time. The selected feature space includes Mean, Standard deviation, ratio based Layer values and Dissimilarity, homogeneity, correlation based on Haralick Texture parameters.
The class hierarchy or classification scheme used for object based classification is presented in figure and the classified map is presented in Fig. 4. Accuracy Assessment with error matrix computation was carried out using Test and Training Masks. An overall accuracy of 90.93 % with a kappa of 0.88 was achieved with this approach.

Classified Map and the classification scheme
Conclusions
Urban environments have high diversity of residential and industrial materials. Combined use of high spatial/spectral resolution data has attracted increasing interest to improve this knowledge and thereby facilitate mapping. The study area consists mainly of plantation of Chirpine (Pinus roxburghii), Sal (Shore Robusta), Eucalyptus (Eucalyptus globulus), Bamboo (Bambusa), Teak (Techtona grandis) and mixed. These were classified in IKONOS data as well as Quickbird data owing to their high spatial resolutions. However more varied tree species specially those that occupy small area could not be distinguished in them. These were clearly identified in WorldView 2 data owing to its high spectral resolution in addition to its high spatial resolution. The less varied varieties like Agasthis robusta, Terminalia Tomentosa, Morus alba, Ficus etc. could be distinguished from each other owing to the new and additional spectral bands and high spatial resolution of the World View 2. The ratios (NIR2- Red/NIR2 + Red, NIR2/Yellow + Red, RedEdge-Yellow/RedEdge + Yellow) were found specially useful for discriminating between healthy and unhealthy vegetation and different vegetation species. Bands that were most effective in discrimination of vegetation species in the order are NIR 2, NIR1, Red Edge, Green and Yellow. It is evident from the study that more variety of vegetation species could be identified as compared to results obtained in Shrestha (2003).
Different Buildings roofs appear in different colours, concrete roof building appear white, Tarred sloping roof of main building appears bluish grey,tin roof mainly red painted appears green. The metalled road has similar colour as some of building but it could be selected due to continuity. The ratio NIR1 by Green and NIR2 by Green was able to differentiate between new and old metalled roads. The ratio values were low for the new roads and high for the old roads in the study area. Urban features emerged better than in Kumar M. (2009). In this study it has been established that object based techniques were useful in extracting building’s shapes and in discriminating different vegetation types using high spatial and spectral resolution data of World View 2.
References
Alonso, M.C., Malpica, J.A. and Agirre, A.M. (2011). Consequences of the hughes phenomenon on some classification Techniques. ASPRS 2011 Annual Conference, Milwaukee, Wisconsin May 1–5, 2011.
Baatz, Z. M., & Schape (1999). A object-oriented and multi-scale image analysis in semantic networks. In: Proc of the 2nd International Symposium on Operation alizarin of Remote Sensing. August 16-20th 1999. Ensehede ITC.
De Kok, R., Schneider, T., Baatz, M., Ammer, U. (1999). Object based image analysis of high resolution data in the alpine forest area. citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.40 accessed on 3rd August 2010
Gao, Y., Mas, J. F., Maathuis, B. H. P., Xiangmin, Z., & van Dijk, P. M. (2006). Comparison of pixel-based and object oriented image classification approaches - a case study in a coal fire area, Wuda, Inner Mongolia, China. International Journal of Remote Sensing, 27(18), 4039–4055.
Hughes, G. F. (1968). On the mean accuracy of statistical pattern recognizers. IEEE Transactions on Information Theory, IT-14, 55–63.
Kumar, M., Sonali, R., and M.K. Mamgain, Evaluation of cartographic potential of Cartosat-1 and IKONOS high resolution imagery for updating large scale guide maps I T P I Journal 5: 2 (2008) 33–38
Kumar, M., Tiwari, P.S., Pande, H., & Dadhwal, V.K. (2009). A semi-automatic segmentation approach procedure for agriculture field boundary extraction in remotely sensed imagery, Indian Society of Remote Sensing Symposia, Nagpur,India.
Kumar, M. & Shrivastava, N. (2009). Multiresolution Segmentation And Classification Based Building Extraction Using Merged CARTOSAT And LISS IV Data, Indian Society of Remote Sensing Symposia, Nagpur,India.
Kumar, N. (2009). Enhance your Analysis with WorldView-2’s Eight Spectral Bands Map Asia 2009 http://www.gisdevelopment.net/technology/rs/ma09_210.htm accessed on 3rd August 2010
Luyao, H. & Ling, N. (2008). Object-Oriented Classification of High Resolution Satellite Image for Better Accuracy, Proceedings of the 8th International Symposium on Spatial Accuracy Assessment in Natural Resources and Environmental Sciences Shanghai, P. R. China, June 25–27, 2008, pp. 211–218
Moreira, R. C., & Galvão, L. S. (2010). Variation in spectral shape of urban materials. Remote Sensing Letters, 1(3), 149–158. First published on: 31 March 2010.
Peijun L., Jiancong G., Haiqing, X., & Xiaobai X. (2010). Multilevel object based image classification over urban area based hierarchical image segmentation and invariant moments http://www.isprs.org/proceedings/XXXVIII/4-C1/Sessions/Session11/6001_Li_Proc.pdf accessed on 3rd August 2010
Mathieu, R., Aryal, J., & Chong, A. K. (2007). Object-based classification of Ikonos imagery for mapping large-scale vegetation communities in urban areas. Sensors, 7, 2860–2880.
Shrestha, H. L. (2003). Comparative Evaluation of Different Spatial Resolution data for Timber Volume Estimation, IIRS – ITC M.SC Thesis.
Tiwari, P.S., Pande, H., & Kumar M. (2009). Potential of IRS P-6 LISS IV for agriculture field boundary delineation. Journal of Applied Remote Sensing, Vol. 3, 033528; doi: 10.1117/1.3133306, Published 22 April 2009.
Updike, T., and Comp C. (2010). Radiometric Use of Worldview-2 Imagery. Nov. 1st, 2010. http://www.digitalglobe.com/downloads/Radiometric_Use_of_WorldView-2_Imagery.pdf
Gao, Y., Mas, J. F., Kerle, N., & Navarrete Pacheco, J. A. (2011). Optimal region growing segmentation and its effect on classification accuracy. International Journal of Remote Sensing, 32(13), 3747–3763.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Kumar, M., Roy, P.S. Utilizing the Potential of World View −2 for Discriminating Urban and Vegetation Features Using Object Based Classification Techniques. J Indian Soc Remote Sens 41, 711–717 (2013). https://doi.org/10.1007/s12524-012-0257-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12524-012-0257-9