
Abstract
The analysis of damage process and the characterization of damaged rock masses through numerical models are the most difficult and challenging tasks in geotechnical engineering. This review paper describes and collects information regarding the causes of damage in the rocks and damage models (constitutive and hybrid damage models) for rock damage analysis. The main objective of this review is to discuss the causes of damage process, characterization, constitutive modes, and impact of natural changes on the selection of damage model. The review suggests that releasable strain energy, crack propagation and coalescence, joints, natural changes, and engineering disturbance are the main causes of rock fracture and damage. Most studies showed that a wider range of rock mass characterization will be required to create an ideal numerical model due to the rock reality, inelasticity, fractures, anisotropy, and inhomogeneity. Hybrid models are more efficient computationally as compared with the constitutive models. The review concludes that numerical models are also applicable tools to understand damage scale, damage degree and type, damage location, and damage occurrence time in the rocks.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In the rock damage process, the mechanical properties of the rocks are continuously diminished due to the natural changes. Several phenomena and processes could contribute in the damage of rocks, for example, integrity loss in the rock masses. Rock integrity loss and failure are energy dissipation phenomena (Zhang et al. 1999), and the strain energy releases during the failure process of rocks which causes damage or fracture (Solecki and Conant 2003). Sometimes, damage and bed separation develop because of water pressure and gas outburst in a magmatic rock which results in the breakdown of the parent rock. The geological defect, goaf collapse, mining engineering, rock burst, and landslide mechanism are also key factors of damage in the rock masses. The processes such as the exhumation of radioactive mineral, seismicity, coupling water, hydraulic fracture growth, and joint propagation could cause damage in the jointed rocks and rock structure (Zhou and Wang 2017). In the bulk and jointed rocks, the damage development, formation of the disturbed zone, and excavation damage zone are affected by the different factors such as excavation methods and stress distribution (Chang and Lee 2004; Golshani et al. 2007). So, the geology and geophysics fields enabled many researchers to understand the damage scale, damage location, and damage occurrence time in the rocks based on microseismic monitoring and modelling technique (Gibowicz and Kijko 2013).
Persistence of the discontinuities also creates fracture and damage in the rocks (Einstein et al. 1983) and weakens the intact rock by propagating the continuous crack results in massive failure (Goodman and Shi 1985). Brittle fracture processes were observed in the rocks during initial loading. The final failure in the rocks is analyzed with crack initiation, crack propagation, rupture, and strength degradation phenomena (Eberhardt et al. 1998; Martin and Chandler 1994). Therefore, rock stability controlling factor such as the amount of discontinuities and strength parameters has become the major concern in the fracturing process (Goh 2000; Mccombie and Wilkinson 2002). The fracture surface is a combination of the cracks and preexisting discontinuities (Chen et al. 2005). Fracture continuation may be pursued after the development of a damage zone and crack arrest before crack tip. Furthermore, a chain of cracks has been observed which created fracture that finally caused failure and damage in the rocks (Ponson et al. 2007). So, various rocks showed different types of fracture network, such as heterogeneous rocks have mostly shown brittle fracture (Ma et al. 2011). Non-homogeneous rocks show ductile fracture (Chen et al. 2004).
Damage models have been also created to predict the damage state and damage degree in the rocks. Within the constitutive damage model, the mechanical response of rock components (i.e., joints and intact rock) works as discrete entities. The relations between these components have been taken into account during the rock damage process simulation. On joint plane, constitutive and continuum damage models are very helpful to sketch interaction between the joints. The rock joints show stretching behavior which is strongly associated with the increase of normal stresses and shear stresses. Andersson and Dverstorp (1987) linked normal and shear stresses to address the shortcoming in the rocks near rough crack surface by using three-dimensional (3D) model. The combination of mechanical formulations and empirically based relations has been used to determine the stress–displacement relation of the rock joints through assorted damage models (Patton 1966). A shear strength rock model was used by Barton and Choubey (1977) for the purpose of discontinuity analysis, joint accounting, disaster analysis, simulation of joint surface roughness, and influence of joint roughness nature of the rocks. But these empirical models were only capable for predicting the shear strength of the rocks during propagation of the damage process (Li 1989). Under the normal compression and during shearing, the linear increment in stresses can be described by practicable continuum model (Cai and Horii 1992). The isotropic damage model, an anisotropic damage model, and an elastoplastic model have been typically identified from the triaxial test (Shao and Khazraei 1994). Carol et al. (1997) presented cracking model, sea bottom shape model, shear cracking model, and binomial rock model for a polynomial rock by using the application of continuum damage mechanics. A variation in distribution flaws and fracture network has been observed during rock failure mechanism with microscopic dynamic rock damage constitutive model and prototypical rock model (Yin et al. 2014).
Multi-scale monitoring data was used to characterize and back-calculate rock shear strength parameters (Cai et al. 2001). Also, the shear strength of the jointed rocks was evaluated by a probabilistic damage model (Duzgun et al. 2002) and with the yield function (Wang et al. 2003). The interactions between the jointed and bulky rocks were totally neglected as the joint behavior was simulated for modelling of the joint interaction (Su et al. 2004). The authors also reported that the joints were distributed within the failure zone. This failure zone would interrupt the extension of an elastic damage model, where anisotropy generally is not significant for modelling purpose and hard to characterize it. Joint width was also taken into account to capture key characteristics of the joints in rocks to separate softening hardening rules (Schreyer and Sulsky 2016). Some scholars suggested the numerical model for the analysis damage in the jointed rocks such as Fu et al. (2017) who proposed an elastic–brittle model to simulate the failure mechanism in the brittle rock mass. The authors also simulated the damage of the jointed rock and reported that two-dimensional and three-dimensional numerical models are effective and efficient to tackle the cracking problems in the jointed rocks. Turichshev and Hadjigeorgiou (2017) successfully used bonded particle models (BPM) for veined rock. Yin and Meng (2019) have also made great contribution in this arena.
The target of this review manuscript is to present the causes, difficulties in capturing the rock reality, damage models, and expected future developments in numerical models (constitutive and hybrid models) in the field of geotechnical engineering and rock mechanics. This review paper also provides summarized information regarding the characterization of the rock masses for ideal damage model and the impact of natural changes on the selection of suitable model. The effectiveness of numerical models for the rock failure and damage mechanism analysis is also provided.
Causes of damage in rocks
Isotropic strain energy
The cause for the common difficulty in modelling the behavior of rock masses is that rocks are non-homogeneous materials. Rocks are also non-elastic, discontinuous, anisotropic, and largely heterogeneous materials. Rocks are under continuous load by land uplifting/subsidence, tectonic movements, earthquakes, tides, and glaciation cycles. A rock block is a permeable medium containing liquids, air and natural gases, under fluid pressures, temperature, and complex conditions (in situ) of stresses. These stresses cause release of strain energy which resulted in damage. Strain energy is an energy dissipated during the newly formed area of fracture surface. The reason is that the energy which is provided to a crack tip for it to propagate must be equal with the quantity of energy dissipated due to the formation of new crack surfaces. This dissipated amount causes crack initiation which leads to damage in the rocks. The causing factors of rock damage are also damage behavior and mechanical properties (Dusseault and Gray 1992). Within the condition of initial loading, rock layers exhibit different deformation modes in plastic range. Due to the influence of triaxiality, the ductile plastic damage process in a rock is linear with effective stress. The effective stress can be analyzed through continuum damage variable (Matzenmiller et al. 1995) and releasable strain energy (Steffler et al. 2003).
Rock failure process can be characterized as an instability incident due to induced energy during the damage development (Xie et al. 2009). The total energy is always in the principal stress space as presented in Fig. 1. The release of energy and dissipation of energy causes strength weakening, damage, and deformation of rocks (Peng et al. 2015). Every deformation mode of rocks approaches many forms of energy (Fig. 1), like plastic energy approaches to total strain energy and recoverable strain energy during loading process of rocks. Kinetic energy is produced during energy dissipation and failure process of rocks. Surface energy approaches to the initiation, coalescence, and propagation of multi-cracks in rocks. The total amount of damage was related to volumetric strain (Zhou et al. 2018). Within the source dimension, the total energy release by rock damage process is ΔU, Δū is the dissipation energy, and the seismic energy is ΔU′ as shown in Fig. 1. The relation of dissipation energy with releasable strain energy can be drawn as Fig. 1.

The relation between dissipation energy and releasable strain energy (after Zhao et al. 2017)
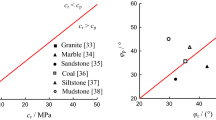
The releasable energy stores in the shape of elastic energy, and it can be changed into the radiation or kinetic energy which results in damage and decrease of mechanical parameters (i.e., elastic modulus) as presented in Table 1. However, stress levels are mostly defined by the deviator stress. The stress ratio (σcd/σc) varies between 1.0 and 0.71, and the stress ratio (σci/σc) varies between 0.60 and 0.36 in different rock types as presented in Table 1.
Crack initiation
Rocks contain a large number of discontinuities resulting from different geological processes. In different rock masses, cracks are widespread which are influenced by the deformation behavior and long-term stability of rock engineering structures. The crack propagation in different amounts is also the main cause of damage in rocks. Therefore, damage initiation analyzing laws often explain the constant-turning stress limit for brittle rocks (Martin 1993) to study microcrack growth and damage process. Pre-peak fragile damage usually starts during uniaxial compression loading (Eberhardt et al. 1999), which results in decrease in strength properties and progressive failure of rocks. On the other hand, induced stress increases the crack growth mostly in loaded rock masses as shown in the right portion of Fig. 2.

The geometry and density of a crack critically influence the deformation process and resisting strength characters of a rock sample. Stress–strain curve of rock specimen is divided into five zones under uniaxial compression (Fig. 2). In Fig. 2, the existing cracks gradually closed under axial stress (see initial stage I) and on one occasion, they are closed as shown in the stage II. The stress–strain curve turns out to be linear. When axial stress continues to rise and crack volume increased, then new cracks start to form in the stage III. In this stage, the additional stress can increase if further cracking will be needed. At the beginning of the stage IV, the entire volumetric strain setbacks and in this stage crack growth are unstable and faster. Macro-range failure develops at ultimate strength which can be seen in the stage V. The stress–strain curve in the upper left portion of Fig. 2 is plotted to identify the four essential stress levels (points), namely top to bottom, peak strength (σf), crack damage stress (σcd), crack initiation stress (σci), and crack closure stress (σcc), respectively. A better understanding of these stress stages will contribute to rock engineering field such as rock damage process investigation, stability analysis of rock structures, rock mass excavation, radioactive waste storage, and mining engineering project.
Failure occurs mostly at the critical length of a crack, and total surface energy is increased parallel with crack propagation (Fig. 2). The failure process of a rock layer is typified with the deformation level (Cai et al. 2004). On the other hand, particular rock damage process is singly encountered when the density of crack is adequate to make tensile spalls or shear band (see bottom left portion of Fig. 2). This form was described mostly as the damage stress state of the cracks (Diederichs et al. 2004). Unstable crack growth has been also mentioned as the crack damage stress threshold (σcd) in the volumetric strain curve through the point of reversal (Fig. 2). A condition at which the correlation of the crack length with the applied stress ends to happen and other factors, such as the propagation process, is controlled by the crack growing velocity. The initiation, procreation, and coalescence of flaws are correlated with the large quantity of energy dissipation which aims in disintegration transition from thin fracture to universal pulverization (Yuan et al. 2011).
Crack coalescence
On the account of fracture mechanics theory, the final deformation of rock is mostly due to the multi-crack coalescence. Complicated interaction between brittle fracture propagation and existing natural discontinuities is the basic reason of failure or big tensile cracks in undamaged rocks. Brittle rock masses exhibited crack coalescence which contained two coplanar fissures and flaws (Park and Bobet 2010). The crack inclination angle and ligament length of crack have an inordinate effect on the process of the crack coalescence in different rocks (Wong and Li 2013). The crack coalescence is observed inside the surface of the granite rock depending on the crack dip angle as shown in Fig. 3. When primary cracks initiate in the rocks, unrecoverable strain energy is produced at the crack tip. This unrecoverable strain energy caused crack initiation, propagation, and coalescence in the rock masses (Malicki and Madejski 2015). For example, from crack propagation to coalescence in a single step, the failure of jointed rock may be a chain failure (Fig. 3). The chain failure of a jointed rock usually occurs due to the propagation of cracks in the direction of the fracture (Sarfarazi et al. 2014), because the crack propagation and coalescence have a crucial effect on the surface of jointed rock which leads in progressive failure or damage as shown in Fig. 3. Also, the fracture or damage can be explained during the energy dissipation process which was followed by crack coalescence and propagation by focusing on the cracking behavior in granite rocks (Cheng et al. 2016). According to Fig. 3, the most of rock cracks are visible which are totally due to coalescence of microcracks.

Rock synthetic model, showing the pre-existing cracks propagation to coalescence and surface failure. Figure modified after Gao et al. (2017)
Natural changes
Characteristics of short- and long-term changes in rock are mostly due to naturally change in climate. It is noticed that the weathering wetting cycles and drying cycles mostly influence rock bedding planes. In short-term rock weathering processes (mechanical and chemical processes), slake durability index parameter has been considered a key effecting factor of rocks (Gokceoglu and Aksoy 2000). The effects of weathering cycles on the strength of a rock indicated that the weathering processes mostly depend on the location and the lithology in the coastal areas (Duperret et al. 2005). Moreover, the weathering profile of shallow landslides in non-welded ignimbrite rock beneath the slope face is infiltrating water and water flux. These are normal to ridge which provides slid material of non-welded ignimbrite rock (Crozier 2010). The influence of temperature changes, volcanic activities, precipitation, earthquake shaking, human actions, and snow melting is also the main cause of rock disaster, damage, and landslides, like Wenchuan earthquake that occurred in the southwest part of China which caused heavy loss of ecological degradation and geological disasters (Cui et al. 2011). Rainstorms, earthquake, and catastrophic debris flows are also considered key factors which cause slid of rock surfaces (Tang et al. 2012). Beniston (2016) has described rock falls, rock avalanches, debris flows, landslides, and original nutrient, flaws which cause erosion, infiltration, and change in bulk density. The debris flows and mountain collapses mostly occur due to the induced earthquake result in the subsequent disaster, death of existing trees, and change in geometric parameters (slope angle and height) of marl rocks (Miscevic and Vlastelica 2014). In semi-arid hot climate, the interaction between slope position and climate type influences the parent rock surface position, nutrient, restoration measures, and chemical properties (Lin et al. 2017).
Stresses in any rock layer are mostly redistributed under the influence of gas extraction, extraction time, drilling, and blasting disturbance which increase the damage process and growth of new cracks near the pre-existing discontinuities (Cheng et al. 2018). From Fig. 4, it can be clearly observed that the damage degree increased by increasing the extraction time and the amount of maximum damage degree was founded at the initial stage of extraction. On the other hand, damage degree was decreased away from the discontinuity. With rising the extraction period, the active stress and the gas pressure reduced gradually, which increased the damage degree at different scale as shown in Fig. 4. This is also highlighted by Cheng et al. (2018) at the same location of discontinuity. The authors reported that when the extraction period was fixed at that time, the damage was smaller and the damage degree of the effected rock stratum decreased at the early stage. Furthermore, by increasing the gas drainage time more than 50 days, the increasing range of the damage degree of the rock model remains constant. Many rock models have been established previously on the basis of climatic profile of the study area; among them, some are presented in Table 2 with wide literature source.

Simulation of damage in coal stratum around discontinuity with extraction time. Results are re-analyzed after Cheng et al. (2018)
Identification of damage type
One-dimensional damage is defined as the area ratio between damage part and whole part of a rock block. To identify the damage state and damage type in rock, a similar numerical model was regenerated after Zhao et al.’s (2017) study in Fast Lagrangian Analysis of Continua (FLAC)) software. Fixed and total displacement constraints were assumed at the side and the bottom of the constitutive model, respectively. Based on rock damage model, Fig. 5 shows the damage development in a rock unit. With maximum allowable tensile and shear displacements, the damage has been explained as shear damage or tensile damage as presented in Fig. 5. The normalizing tensile and shear displacements have been used to calculate the damage type (Zhao et al. 2017). Figure 5 a describes the damage state of rock material ranging from 0 to 1. In Fig. 5a, dark red color is showing the maximum damaged area. Damage type can be seen in Fig. 5b, i.e., pure tensile or shear damage, where 0 and 1 represent pure shear and pure tensile damage, respectively. Figure 5 b is also used to predict type and amount of damage, where dark-orange and light-blue colors are related with tensile and shear damage, respectively. In demonstrating the time series, the progression of damage value equal to 0.1 is considered as a minor extent of damage remarkably disturbed within tension field.

Identification of the rock damage process based on finite damage model. a Damage degree. b Damage type
A large number of damage models have been developed to simulate or identify the damage process in rocks over the years. Most notable among them are with persistent joints in rock mass; a dynamic constitutive damage model was used by Liu et al. (2015). A plasticity damage model for intact rock was presented by Unteregger et al. (2015). The constitutive damage model has been used by Zhao et al. (2017). Discrete element model was selected for damage and deformation investigation of salt rock (Muller et al. 2018). Damage mechanical model was created for fatigue damage analysis in jointed rock masses (Yang et al. 2019).
To capture such kind of damage and effectively characterize the rock reality in detail in computational damage models, it is compulsory to be able to comprise the following silent-features during modelling:
-
The in situ condition of rock stress
-
The existence of natural discontinuities (fractures, cracks, and flaws)
-
The pre-existing state of water pressure and temperature
-
Heterogeneity in material and in parameters at different locations
-
Dissimilarities of parameters in different directions
-
Dissimilarities of parameters at different scales
These features can be assimilated actually through the damage model which totally depends on the modelling techniques used and physical processes involved. So, both the consequent rock engineering design and modelling will cover particular findings.
Characterization of rocks for damage model
Modelling is linked to specific or generic rocks. Various types of damage models have been proposed based on initial boundary conditions and the rock properties. For example, at a specific location, the elastic model of a rock requires knowledge of the elastic parameters and the in situ stress state of rock. If damage model is to integrate the core components of rock reality, inelasticity, fractures, inhomogeneity, and anisotropy including surface disaster than a wider rock mass characterization are required.
The problems facing during the rock characterization are as follows:
-
It is not easy to characterize the in situ rock stress over the all section to be modeled.
-
On a larger scale, rock parameters could not signify the values because measured in the laboratory.
-
Rock parameters could have to be calculated from realistic characterization methods.
-
It is not easy to quantify the uncertainty during the rock property estimation.
-
It is difficult and more important to clearly represent the equivalent properties or fractures, i.e., continuum models vs. discontinuum.
-
How can we combine rock characterization method and numerical modelling technique to be calibrated?
-
How can we provide some direction on whether it is a satisfactory method technically examined the rock characterization?
It is difficult (but not impossible) to provide the essential rock characterization limits due to these difficulties. We can overcome these problems by carefully considering the suitable relation between numerical models and rock characterization. Various kinds of rock property characterization will need to create a suitable numerical model for rock damage analysis. Consequently, the demand of whether the computational models are effective in apprehending the rock certainty links to both the related rock property characterization and the numerical modelling method.
Jelinek (1981) has characterized the anisotropy degree, difference shape factor, and shape factor in fabric of magnetic rocks. Extension theory has been used to check the influence of evaluation index and to perform quantitative analysis on rocks for damage analysis (Ghaboussi and Barbosa 1990). The authors also characterized the evaluation index, force, displacement, slope effecting factors, instability characterization coefficient, key blocks, and slope discrete mass through numerical model. The feasible and convenient evaluation method between injury loss and unconfined compressive strength of carbonate was characterized by Carter and Lajtai (1992) based on quantitative relation. Coefficient of the instability of key blocks and impact amount of key blocks which combined the key block weight with the instability characterization coefficient were characterized based on analytic hierarchy process (Shakoor and Brown 1996). The movement increasing factors of rock structures like transient forces, shear stresses, normal stresses, lateral pressure and loading forces, climatic effect, and factor of safety were characterized by Yang et al. (2015). The characterization factor of safety for rock slope stability investigation conjunctive with instability characterization coefficient has been applied in speculative analysis for practical engineering fields (Zhao et al. 2015). Also, the authors reported that multi-index evaluation and multi-level evaluation systems can be considered as a useful technique to measure quantitative texture and the weight of key blocks of metamorphic and igneous rocks. The basic information about creep degradation mechanism in the red-layer rock can be found in Deng et al.’s (2016) study. On the basis of the information of key blocks, a feasible and convenient evaluation method was applied to characterize the stability of rock slope within the framework of Geotechnical Structure and Model Analyzing (GeoSMA-3D) computer program by Wang et al. (2018).
Damage models of rocks
Constitutive models
The typical constitutive models, with unusual considerations of fracture influences, are the numerical models that have been established generally on the theory of plasticity and elasticity. Linear elastic models, based on the Hooke’s law, are still by distant the most extensively assumed hypothesis for the determination of mechanical behavior of the hard rock masses. Constitutive models of rocks have been developed by Kachanov (1958) using continuum damage mechanics theory. This theory serves as a bridge, (Oliver 2000) and is very diligently associated to both fracture and continuum mechanics. This one has a convinced parallelism, in the formulation, with the plastic numerical models, such as it is restricted by normality rules. So, damage evolution laws are much appropriate in the place of movement laws. The damage mechanics theory also has a particular benefit in study of ductile–brittle deformation modes of rock material and in the estimation of the strain localization factors during the initiation of rock damage process. A comprehensive literature on the development, characteristics, trends, and weaknesses of damage mechanism is given in De Borst’s (2002) research. Hence, the mechanics of damage and associated constitutive models have been developed to study strain localization phenomena, rock fracture, and strength degradation of rocks (Kawamoto et al. 1988). An extensive study has been also published previously on damage models based on rock types. Some recently created constitutive models are summarized in Table 3.
For practical rock engineering issues, the constitutive models of rocks are one of the most essential constituents of numerical explanations. These models are included for both fractured rock masses and rock fractures. To make the presentation clearer and the hottest developments in the numerical modelling field, the damage models are mostly grouped in to two types according to traditional application areas and their different formulation platforms: classical constitutive models, viscosity and time effects, failure criteria, homogenization and size effects, rock fracture models, and damage mechanics models. Numerical and experimental investigations (e.g., the investigation of propagation of acoustic wave in fracture rocks under unloading or loading processes) have been used to model both non-linear and dynamic behavior of rock with discrete element method (Ravazzoli et al. 2003). Numerical discontinuum model has been considered a vigorous tool to performed dynamic and static analyses for damage mechanism (Bhasin and Kaynia 2004). Near the excavation damage zone, geo-hydro-mechanical processes can predict damage in salty rock, plastic clay, and crystalline rock with damage model. Figure 6 shows a rock damage model process initiation in fracture rock block. This damage model was developed in the framework of FLAC computer code. All constitutive numerical models are provided in Dynamic Link Library (DLL) files to all users (Itasca 2012). A minor quantity of microseismic events can be seen in Fig. 6a with comparatively small amount of damage in the range of 0.2–0.4. Microseismic events increase as shown in Fig. 6b with large amount of damage degree (0.5–0.9). Also, plastic zone can be found in Fig. 6b based on rock block damage model.

Simulation of tectonic damage process within the network of FLAC software. a Damage zone consists of fault planes parallel to joints. b As strain increases, joint cluster reactivates as a slip surface because joint clusters are common due to core erosion, and fluid flow can cause damage. Damage process is re-simulated after Zhao et al. (2017)
The main purpose of this review is to collect numerical models for damage analysis and establish a network for systematically evaluating, testing, and studying rock damage process. This includes evaluating the most significant parameters and observing even if a rock damage model, with a statistical result in similar rock grounding damage, is suitable. In the simulation of rock damage process, damage models have also been created on the basis of damage extension theory under one-dimensional conditions. Due to further development in damage extension theory, damage model concept becomes a vigorous tool (Brady et al. 1973; Dragon and Mroz 1979). Continuum damage model has also been largely used to explain rocks joint behavior and continuum damage variables (Chaboche 1988; Simo and Ju 1987). Continuum damage mechanics is based on the irreversible process of thermodynamics. Damage theory is a fast emerging second form of the proportional tensor to establish damage model of discontinuous rock masses, because fracture behavior and deformation process of rocks are usually relevant to damage models, like net stress and damage variable (Valliappan et al. 1990). Final concepts of damage model was presented by Cao et al. (2010) with the help of anisotropic damage model within the network of a finite element (FM) modelling tool (Sormunen 2014). The shape of a damage model also plays a key role in the analysis of damage such as sea bottom shape model was selected to predict the weathering effects on the surface of a polynomial rock mass (Sormunen et al. 2016a). It is impossible to adopt anisotropic damage theory directly for fractured and jointed rock material to develop three-dimensional damage model (Hu et al. 2018; Zhao et al. 2017). Some rock damage models are presented in Table 3. These models have been used to study the damage process in rock media.
In modelling requirements, rock engineering projects are becoming more demanding, one of which might be to consist hybrid thermo-hydro-mechanical behavior into the computational damage model. An adequate damage model is needed for the whole information of the physical, shear strength and geometrical parameters of a damaged rock mass. So, the problem in numerical modelling is how to generate a satisfactory damage model. A constitutive model does not have to be perfect and complete: it only has to be suitable for the purpose. The constitutive models (damaged models) of rock, containing those for both damaged rock and rock damage, for practical rock mechanics issues, are the most significant constituents of numerical solutions and one of the most continuously and intensively studied topics in rock engineering and rock mechanics. The recent improvements in the area are briefly presented with rock type reinforced by literature sources in Table 3.
For these ins and outs, rock mechanics modelling is an art and a science. They require empirical judgments but rest on a scientific foundation sustained by accumulated skills. This is a case for the reason that the quality and quantity for rock engineering analyses of the supporting data can never be comprehensive, even yet they can be faultlessly well-defined in computational models. Modelling steps of fractured rocks and damage models demands high-performance computer codes and numerical methods, especially regarding material heterogeneity, fracture representations, scale effects, and coupling with fluid flow. It is frequently unnecessarily preventive to use individual numerical model to be responsible for acceptable illustrations for the most significant mechanisms and features. The numerous process codes or hybrid models are repeatedly adopted in mishmash in repetition.
Hybrid models
In rock engineering, field hybrid models are basically used for flow and stress/deformation issues in fractured rocks. Finite element model/boundary element model (FEM/BEM) and discrete element model/boundary element model (DEM/BEM) are the core types of hybrid models. Zienkiewicz et al. (1977) proposed the hybrid FEM/BEM first time. Coupled FE/BE models are much resourceful computationally, and within the finite element (FE) region, they are also capable to deal with the non-linear behavior of discontinuous rock masses. Hybrid FEM/DEM models are also established as an equivalent elastic continuum for simulating far-fractured near-field. The hybrid BEM/DEM model was proposed by Lorig and Brady (1984). This hybrid model is a useful tool for the analysis of conjunctive hydro-mechanical process in fractured rock masses. Lemos (1987) implemented the hybrid FEM/DEM model into Universal Distinct Element Code (UDEC). The basic principle is to provide the region of a boundary element model (which encloses the distinct element model zone) as a “super” rock block which can be used as contact representations in standard distinct element model (DEM), and along the interfaces, it has direct interactions with DEM region. The basic conditions are as follows: (a) along the interfaces, the “kinematic continuity” of the dualistic zone for the period of the time-marching process is similar, and (b) near the interface, the elastic parameters of the dualistic zone are also similar.
For mixed hydro-mechanical study on fractured rocks, with the help of BEM approaches, Wei and Hudson (1998) developed a hybrid discrete-continuum models by using combinations of discrete fracture network (DFN) and DEM. DFN and DEM models are used as near-field of cracked rock mass. BEM is used to represent the dominance of fractures, stress/deformation, fluid flow, and the far-field of rock blocks in a continuum along near-field. By separating BEM, DEM, and DFN codes, the equations of motion and flow can be resolved individualistically with the help of time-marching process. These models (BEM, DEM, and DFN) are hybrid through a core linking algorithm.
There are also some other hybrid (coupled) models, besides the above conventional hybrid models, which gain the benefit of dissimilar arithmetical approaches. Pottler and Swoboda (1986) presented a beam-BEM couple model using the same principle as the hybrid FEM/BEM model to determine the support behavior. Sugawara et al. (1988) introduced a BEM couple model for the simulation of non-linear behavior of rock cavern on the basis of characteristics method.
Pan and Reed (1991) have introduced a couple FEM/DEM model, in which the FEM region consists of non-linear material behavior and DEM can have rigid blocks in any region. The algorithm techniques place the simulation of FEM into the time-marching process of DEM. Subsequently, the region of finite element model is an elastic continuum and the blocks in distinct element model region are rigid.
The micromechanical hybrid model (FEM/BEM) can provide the global stress–strain response and information about microstructure evolution through the distribution of crack density parameter as compared with phenomenological models (Fig. 7). Figure 7 presents the hybrid (FEM/BEM) damage model, damage degree, and non-uniform feature of crack growth in rosette at the peak stress. To describe the damage state of the rocks, it is necessary to define a diversity of damage variables and the relationship with rock and the energy change. Therefore, the relationship between the releasable strain energy and seismic energy acquired from microseismic monitoring is practical. Guo et al. (2017) presented rock integrity index borehole televiewers (RMIBT) method to analyze the damage process through digital borehole televiewer data. Considering the purpose of exploratory study and the complexity of engineering computation on damage investigation by source constraints, it can be assumed before the happening of microseismic events that there is no damage in the rock to create a suitable hybrid model.

A rosette FEM/BEM hybrid damage model of granite rock
As compared with sample FE model, the coupled BEM/FEM models are much effective computationally, with some extra advantage of being able in the FE region to deal with the non-linear behavior of brittle like materials, using the advantages of FEM. However, symmetrized BEM equation may affect these advantages. In this direction, a potential forward step is to use the Galerkin binary integration methods in the region of boundary element model, so that the ultimate stiffness matrix of BEM is automatically symmetric, and then, this can be directly implanted in the absolute hybrid FEM/BEM matrix without any errors occurred by synthetic “summarization.”
On the other hand, there are still some issues concerning to the damage models as: It is truth that due to our inadequate information about the physical and mechanical behavior of damaged rock masses and rock damages, “all-inclusive” damage models do not exist today. However, damage models are still largely and useful tools for generic studies, conceptual understanding, complex rock engineering problems, rock damage process analysis, slope stability analysis, tunnel design, and dam design.
Application of damage models
Many scholars have been used damage models successfully to study the damage behavior and damage degree in rock masses and rock structures to overcome the engineering problems, such as Lemaitre (1985) used damage mechanic model to study damage of ductile rocks. Sormunen et al. (2016b) used rock shape models to investigate grounding damage. Zhao et al. (2017) established rock damage model by considering releasable strain energy to study damage process in rocks. Li et al. (2017) established the constitutive damage model with the help of Weibull distribution power function distribution for every main types of rock masses to study microdamage process. Zheng et al. (2018) have successfully implemented parallel layer model (PLM) to investigate the influence of the thickness of blast injury zone on the rock surface. Zhou et al. (2018) established a hybrid fluid–solid numerical model to simulate the damage process in rocks considering the effects of water and joints. Silva et al. (2018) established Holmberg and Persson (H-P) model to estimate peak particle velocity (PPV) around a blast hole and also analyzed the harms of blasting on rocks. Zhou et al. (2018) used rock damage model to study damage process, water, microseismicity, and coupling joints. Liu et al. (2018) established damage constitutive model to investigate mechanical properties in coal rock. Shuguang et al. (2018) introduced a non-linear creep damage model of surrounding rocks in the Fuxin Hengda coal mine and also used in the stability analysis of jointed rock masses. Yang et al. (2019) modified the mechanical properties of rocks based on a damage mechanical model.
Also, in reality, the hydro-mechanical behavior of large damage, damage zones, and faults under massive rock block cannot be captured up to date within numerical model. This shortage of study in this respect leads to the absence of an appropriate damage model. Mostly, rock damage and fracture are usually acquired from the laboratory investigations with limited size range, 100–400 mm. This size may not be largely sufficient to influence the stationarity threshold, depending on the irregularity characteristics of the surfaces of the cracks.
Conclusion
The review concluded that the strain energy, crack initiation, crack coalescence, and natural changes influence the strength properties of the rock masses. The effect of the multiple cracks and a single crack on the rocks has various impacts at the different crack initiation stages. The numerical “models” are now primary parts in research for rock engineering, rock mechanics, and geotechnical engineering fields. Two-dimensional and three-dimensional numerical models are effective and efficient tools to tackle the cracking problems in rocks dealing with numerous elements. To simulate the damage of rocks, boundary element model (BEM) is more appropriate and the best tool for solving large-scale problems, compared with the FDM and FEM. The constitutive and hybrid damage models for rock engineering and rock mechanics rely on the quantity and quality of the physical and mechanical behaviors of the individual cracks and the characterization of a crack geometry.
References
Ahmed Z, Wang S, Hashmi MZ, Zhu C, Zishan Z, Jierula A, Pengyu W (2020) Failure analysis of rock cut slope formed by layered blocks at Fort Munro, Pakistan. AJGS 13:1–11
Andersson J, Dverstorp B (1987) Conditional simulations of fluid flow in three-dimensional networks of discrete fractures. Water Resour Res 23:1876–1886
Backblom G (2008) Excavation damage and disturbance in crystalline rock: results from experiments and analyses. SKB
Barla M, Piovano G, Grasselli G (2011) Rock slide simulation with the combined finite-discrete element method. Int J Geomech 12:711–721
Barton N, Choubey V (1977) The shear strength of rock joints in theory and practice. Rock Mech 10:1–54
Beniston M (2016) Environmental change in mountains and uplands. Routledge
Bhasin R, Kaynia AM (2004) Static and dynamic simulation of a 700-m high rock slope in western Norway. Eng Geol 71:213–226
Bieniawski ZT (1967) Mechanism of brittle fracture of rock: part I-theory of the fracture process. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts. Elsevier 395–406
Brady B, Duvall W, Horino F (1973) An experimental determination of the true uniaxial stress-strain behavior of brittle rock. Rock Mech 5:107–120
Cai M, Horii H (1992) A constitutive model of highly jointed rock masses. Mech Mater 13:217–246
Cai M, Kaiser P, Martin C (2001) Quantification of rock mass damage in underground excavations from microseismic event monitoring. Int J Rock Mech Min Sci 38:1135–1145
Cai M, Kaiser P, Tasaka Y, Maejima T, Morioka H, Minami M (2004) Generalized crack initiation and crack damage stress thresholds of brittle rock masses near underground excavations. Int J Rock Mech Min Sci 41:833–847
Cao WG, Zhao H, Li X, Zhang YJ (2010) Statistical damage model with strain softening and hardening for rocks under the influence of voids and volume changes. Can Geotech J 47:857–871
Carol I, Prat PC, Lopez CM (1997) Normal/shear cracking model: application to discrete crack analysis. J Eng Mech 123:765–773
Carter BJ, Lajtai EZ (1992) Rock slope stability and distributed joint systems. Can Geotech J 29:53–60
Chaboche JL (1988) Continuum damage mechanics: part II-damage growth, crack initiation, and crack growth. J Appl Mech 55:65–72
Chang SH, Lee CI (2004) Estimation of cracking and damage mechanisms in rock under triaxial compression by moment tensor analysis of acoustic emission. Int J Rock Mech Min Sci 41:1069–1086
Chen S, Yue Z, Tham L (2004) Digital image-based numerical modeling method for prediction of inhomogeneous rock failure. Int J Rock Mech Min Sci 41:939–957
Chen JP, Shi BF, Wang Q (2005) Study on the dominant orientations of random fractures of fractured rock masses. Rock Mech Eng 24:241–245
Chen L, Wang J, Zong Z, Liu J, Su R, Guo Y, Jin Y, Chen W, Ji R, Zhao H (2015) A new rock mass classification system QHLW for high-level radioactive waste disposal. Eng Geol 190:33–51
Cheng H, Zhou X, Zhu J, Qian Q (2016) The effects of crack openings on crack initiation, propagation and coalescence behavior in rock-like materials under uniaxial compression. Rock Mech Rock Eng 49:3481–3494
Cheng H, Zhang N, Yang Y, Dong Y, Peng W (2018) 3-D dynamic evolution analysis of coal-rock damaged field and gas seepage field during the gas extraction process. J Natural Gas Sci Eng 56:444–454
Crozier MJ (2010) Deciphering the effect of climate change on landslide activity: a review. Geomorphology 124:260–267
Cui P, Chen XQ, Zhu YY, Su FH, Wei FQ, Han YS, Liu HJ, Zhuang JQ (2011) The Wenchuan earthquake (May 12, 2008), Sichuan province, China, and resulting geohazards. Nat Hazards 56:19–36
De Borst R (2002) Fracture in quasi-brittle materials: a review of continuum damage-based approaches. Eng Fract Mech 69:95–112
Deng H, Zhou M, Li J, Sun X, Huang Y (2016) Creep degradation mechanism by water-rock interaction in the red-layer soft rock. Arab J Geosci 9:601
Diederichs M, Kaiser P, Eberhardt E (2004) Damage initiation and propagation in hard rock during tunnelling and the influence of near-face stress rotation. Int J Rock Mech Min Sci 41:785–812
Dragon A, Mroz Z (1979) A continuum model for plastic-brittle behaviour of rock and concrete. Int J Eng Sci 17:121–137
Duperret A, Taibi S, Mortimore RN, Daigneault M (2005) Effect of groundwater and sea weathering cycles on the strength of chalk rock from unstable coastal cliffs of NW France. Eng Geol 78:321–343
Dusseault M, Gray K (1992) Mechanisms of stress-induced wellbore damage. SPE Formation Damage Control Symposium. Society of Petroleum Engineers
Duzgun H, Yucemen M, Karpuz C (2002) A probabilistic model for the assessment of uncertainties in the shear strength of rock discontinuities. Int J Rock Mech Min Sci 39:743–754
Eberhardt E, Stead D, Stimpson B, Read R (1998) Identifying crack initiation and propagation thresholds in brittle rock. Can Geotech J 35:222–233
Eberhardt E, Stead D, Stimpson B (1999) Quantifying progressive pre-peak brittle fracture damage in rock during uniaxial compression. Int J Rock Mech Min Sci 36:361–380
Einstein H, Veneziano D, Baecher G, Oreilly K (1983) The effect of discontinuity persistence on rock slope stability. International journal of rock mechanics and mining sciences and geomechanics abstracts. Elsevier 227–236
Fakhimi A, Carvalho F, Ishida T, Labuz J (2002) Simulation of failure around a circular opening in rock. Int J Rock Mech Min Sci 39:507–515
Fonseka G, Murrell S, Barnes P (1985) Scanning electron microscope and acoustic emission studies of crack development in rocks. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts. Elsevier 273–289
Fu JW, Zhang XZ, Zhu WS, Chen K, Guan JF (2017) Simulating progressive failure in brittle jointed rock masses using a modified elastic-brittle model and the application. Eng Fract Mech 178:212–230
Gao W, Dai S, Xiao T, He T (2017) Failure process of rock slopes with cracks based on the fracture mechanics method. Eng Geol 231:190–199
Ghaboussi J, Barbosa R (1990) Three-dimensional discrete element method for granular materials. Int J Numer Anal Methods Geomech 14:451–472
Gibowicz SJ, Kijko A (2013) An introduction to mining seismology. Elsevier
Goh AT (2000) Search for critical slip circle using genetic algorithms. Civ Eng Syst 17:181–211
Gokceoglu C, Aksoy H (2000) New approaches to the characterization of clay-bearing, densely jointed and weak rock masses. Eng Geol 58:1–23
Golshani A, Oda M, Okui Y, Takemura T, Munkhtogoo E (2007) Numerical simulation of the excavation damaged zone around an opening in brittle rock. Int J Rock Mech Min Sci 44:835–845
Gonzalez-Nicieza C, Alvarez-Fernandez M, Menendez-Diaz A, Alvarez-Vigil A (2006) A comparative analysis of pillar design methods and its application to marble mines. Rock Mech Rock Eng 39:421–444
Goodman RE, Shi Gh (1985) Block theory and its application to rock engineering. Prentice-Hall Englewood Cliffs, NJ
Guo HS, Feng XT, Li SJ, Yang CX, Yao ZB (2017) Evaluation of the integrity of deep rock masses using results of digital borehole televiewers. Rock Mech Rock Eng 50:1371–1382
Hatzor Y, Palchik V (1997) The influence of grain size and porosity on crack initiation stress and critical flaw length in dolomites. Int J Rock Mech Min Sci 34:805–816
Heo JS, Lee CI, Jeon SK (2004) Measurement of acoustic emission and source location considering anisotropy of rock under triaxial compression. Key Eng Mater Trans Tech Publ 270-273:1574–1579
Hu Y, Ms L, Wu X, Zhao G, Li P (2018) Damage-vibration couple control of rock mass blasting for high rock slopes. Int J Rock Mech Min Sci 103:137–144
Itasca (2012) FLAC-3D (version 5.0) user manual. Itasca Cons Group Inc, Minneapolis
Jelinek V (1981) Characterization of the magnetic fabric of rocks. Tectonophysics 79:63–67
Jiang T, Shao J, Xu W, Zhou C (2010) Experimental investigation and micromechanical analysis of damage and permeability variation in brittle rocks. Int J Rock Mech Min Sci 47:703–713
Kachanov LM (1958) Time of the rupture process under creep conditions, Izy Akad. Nank SSR Otd Tech Nauk 8:26–31
Kawamoto T, Ichikawa Y, Kyoya T (1988) Deformation and fracturing behaviour of discontinuous rock mass and damage mechanics theory. Int J Numer Anal Methods Geomech 12:1–30
Lemaitre J (1985) A continuous damage mechanics model for ductile fracture. J Eng Mater Technol 107:83–89
Lemos J (1987) A hybrid distinct element computational model for the half-plane, MSc thesis, Department of Civil Engineering, University of Minnesota
Li B (1989) Contact density model for stress transfer across cracks in concrete. Journal of the Faculty of Engineering, the University of Tokyo 9-52
Li G, Tang CA (2015) A statistical meso-damage mechanical method for modeling trans-scale progressive failure process of rock. Int J Rock Mech Min Sci 74:133–150
Li Y, Jia D, Rui Z, Peng J, Fu C, Zhang J (2017) Evaluation method of rock brittleness based on statistical constitutive relations for rock damage. J Pet Sci Eng 153:123–132
Li X, Li X, Li H, Zhang Q, Zhao J (2018) Dynamic tensile behaviours of heterogeneous rocks: the grain scale fracturing characteristics on strength and fragmentation. Int J Impact Eng 118:98–118
Lin Y, Deng H, Du K, Li J, Lin H, Chen C, Fisher L, Wu C, Hong T, Zhang G (2017) Soil quality assessment in different climate zones of China’s Wenchuan earthquake affected region. Soil Tillage Res 165:315–324
Liu H, Lv S, Zhang L, Yuan X (2015) A dynamic damage constitutive model for a rock mass with persistent joints. Int J Rock Mech Min Sci 75:132–139
Liu X, Tan Y, Ning J, Lu Y, Gu Q (2018) Mechanical properties and damage constitutive model of coal in coal-rock combined body. Int J Rock Mech Min Sci 110:140–150
Lorig L, Brady B (1984) 13 A hybrid computational scheme for excavation and support design in jointed rock media. Design and performance of underground excavations: ISRM Symposium-Cambridge, UK, Thomas Telford Publishing 105–112
Ma G, Wang X, Ren F (2011) Numerical simulation of compressive failure of heterogeneous rock-like materials using SPH method. Int J Rock Mech Min Sci 48:353–363
Malicki M, Madejski B (2015) The impact of damage in Inconel 718 on hardness measured by the Vickers method. Fatigue of Aircraft Structures 2015:69–79
Martin CD (1993) The strength of massive Lac du Bonnet granite around underground openings
Martin C, Chandler N (1994) The progressive fracture of Lac du Bonnet granite. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts. Elsevier 643–659
Matzenmiller A, Lubliner J, Taylor R (1995) A constitutive model for anisotropic damage in fiber-composites. Mech Mater 20:125–152
Mccombie P, Wilkinson P (2002) The use of the simple genetic algorithm in finding the critical factor of safety in slope stability analysis. Comput Geotech 29:699–714
Miscevic P, Vlastelica G (2014) Impact of weathering on slope stability in soft rock mass. J Rock Mech Geotech Eng 6:240–250
Muller C, Fruhwirt T, Haase D, Schlegel R, Konietzky H (2018) Modeling deformation and damage of rock salt using the discrete element method. Int J Rock Mech Min Sci 103:230–241
Oliver J (2000) On the discrete constitutive models induced by strong discontinuity kinematics and continuum constitutive equations. Int J Solids Struct 37:7207–7229
Pan X, Reed M (1991) A coupled distinct element-finite element method for large deformation analysis of rock masses. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts. Elsevier 93–99
Park C, Bobet A (2010) Crack initiation, propagation and coalescence from frictional flaws in uniaxial compression. Eng Fract Mech 77:2727–2748
Patton FD (1966) Multiple modes of shear failure in rock. 1st ISRM Congress. International Society for Rock Mechanics
Peng R, Ju Y, Wang J, Xie H, Gao F, Mao L (2015) Energy dissipation and release during coal failure under conventional triaxial compression. Rock Mech Rock Eng 48:509–526
Ponson L, Auradou H, Pessel M, Lazarus V, Hulin JP (2007) Failure mechanisms and surface roughness statistics of fractured Fontainebleau sandstone. Phys Rev E 76:036108
Pottler R, Swoboda G (1986) Coupled beam-boundary-element model (BE-BEM) for analysis of underground openings. Comput Geotech 2:239–256
Ravazzoli C, Santos J, Carcione J (2003) Acoustic and mechanical response of reservoir rocks under variable saturation and effective pressure. J Acoust Soc Am 113:1801–1811
Sarfarazi V, Ghazvinian A, Schubert W, Blumel M, Nejati H (2014) Numerical simulation of the process of fracture of echelon rock joints. 47:1355–1371
Schreyer H, Sulsky D (2016) Constitutive and numerical framework for modeling joints and faults in rock. Int J Numer Anal Methods Geomech 40:1253–1283
Shakoor A, Brown C (1996) Development of a quantitative relationship between unconfined compressive strength and Los Angeles abrasion loss for carbonate rocks. Bull Int Assoc Eng Geol 53:97–103
Shao J, Khazraei R (1994) Wellbore stability analysis in brittle rocks with continuous damage model. Rock Mechanics in Petroleum Engineering. Society of Petroleum Engineers
Shuguang Z, Wenbo L, Hongmiao L (2018) Creep energy damage model of rock graded loading. Results in Physics
Silva J, Worsey T, Lusk B (2018) Practical assessment of rock damage due to blasting. International Journal of Mining Science and Technology
Simo J, Ju J (1987) Strain-and stress-based continuum damage models-II. Comput Aspects Int J Solids Struct 23:841–869
Solecki R, Conant RJ (2003) Advanced mechanics of materials. Oxford University Press on Demand
Sormunen OV (2014) Ship grounding damage estimation using statistical models. Proceedings of the PSAM’12 Conference 22-27
Sormunen OVE, Castren A, Romanoff J, Kujala P (2016a) Estimating sea bottom shapes for grounding damage calculations. Mar Struct 45:86–109
Sormunen OVE, Korgesaar M, Tabri K, Heinvee M, Urbel A, Kujala P (2016b) Comparing rock shape models in grounding damage modelling. Mar Struct 50:205–223
Steffler E, Epstein J, Conley E (2003) Energy partitioning for a crack under remote shear and compression. Int J Fract 120:563–580
Su C, Wei Y, Anand L (2004) An elastic–plastic interface constitutive model: application to adhesive joints. Int J Plast 20:2063–2081
Sugawara K, Aoki T, Suzuki Y (1988) A coupled boundary element-characteristics method for elasto-plastic analysis of rock caverns. ISRM International Symposium. International Society for Rock Mechanics and Rock Engineering
Tang C, Van Asch TW, Chang M, Chen G, Zhao X, Huang X (2012) Catastrophic debris flows on 13 August 2010 in the Qingping area, southwestern China: the combined effects of a strong earthquake and subsequent rainstorms. Geomorphology 139:559–576
Turichshev A, Hadjigeorgiou J (2017) Development of synthetic rock mass bonded block models to simulate the behaviour of intact veined rock. Geotech Geol Eng 35:313–335
Unteregger D, Fuchs B, Hofstetter G (2015) A damage plasticity model for different types of intact rock. Int J Rock Mech Min Sci 80:402–411
Valliappan S, Murti V, Wohua Z (1990) Finite element analysis of anisotropic damage mechanics problems. Eng Fract Mech 35:1061–1071
Wang J, Ichikawa Y, Leung C (2003) A constitutive model for rock interfaces and joints. Int J Rock Mech Min Sci 40:41–53
Wang F, Wang S, Hashmi MZ, Xiu Z (2018) The characterization of rock slope stability using key blocks within the framework of GeoSMA-3D. Bull Eng Geol Environ:1–16
Wang S, Ahmed Z, Hashmi MZ, Pengyu W (2019a) Cliff face rock slope stability analysis based on unmanned arial vehicle (UAV) photogrammetry. JG Geo-Energy Gf Geo-Resour 5:333–344
Wang S, Zhang Z, Wang C, Zhu C, Ren Y (2019b) Multistep rocky slope stability analysis based on unmanned aerial vehicle photogrammetry. 78:260
Wei L, Hudson JA (1998) A hybrid discrete-continuum approach to model hydro-mechanical behaviour of jointed rocks. Eng Geol 49:317–325
Williams HM, Peslier AH, Mccammon C, Halliday AN, Levasseur S, Teutsch N, Burg JP (2005) Systematic iron isotope variations in mantle rocks and minerals: the effects of partial melting and oxygen fugacity. Earth Planet Sci Lett 235:435–452
Wong LNY, Li HQ (2013) Numerical study on coalescence of two pre-existing coplanar flaws in rock. Int J Solids Struct 50:3685–3706
Xie H, Li L, Peng R, Ju Y (2009) Energy analysis and criteria for structural failure of rocks. J Rock Mech Geotech Eng 1:11–20
Xu Y, Dai F, Xu N, Zhao T (2016) Numerical investigation of dynamic rock fracture toughness determination using a semi-circular bend specimen in split Hopkinson pressure bar testing. Rock Mech Rock Eng 49:731–745
Yang S, Jiang Y, Xu W, Chen X (2008) Experimental investigation on strength and failure behavior of pre-cracked marble under conventional triaxial compression. Int J Solids Struct 45:4796–4819
Yang T, Shi W, Wang P, Hl L, Yu Q, Li Y (2015) Numerical simulation on slope stability analysis considering anisotropic properties of layered fractured rocks: a case study. Arab J Geosci 8:5413–5421
Yang W, Zhang Q, Ranjith P, Yu R, Luo G, Huang C, Wang G (2019) A damage mechanical model applied to analysis of mechanical properties of jointed rock masses. Tunn Undergr Space Technol 84:113–128
Yin D, Meng X (2019) Numerical simulation on uniaxial compression failure of a roof rock-coal-floor rock composite sample with coal persistent joint. Geotech Geol Eng 37:13–23
Yin P, Wong R, Chau K (2014) Coalescence of two parallel pre-existing surface cracks in granite. Int J Rock Mech Min Sci 68:66–84
Yuan F, Prakash V, Tullis T (2011) Origin of pulverized rocks during earthquake fault rupture. J Geophys Res Solid Earth:116
Zhang Z, Kou S, Yu J, Yu Y, Jiang L, Lindqvist PA (1999) Effects of loading rate on rock fracture. Int J Rock Mech Min Sci 36:597–611
Zhao B, Xu W, Liang G, Meng Y (2015) Stability evaluation model for high rock slope based on element extension theory. Bull Eng Geol Environ 74:301–314
Zhao L, Zhu Q, Xu W, Dai F, Shao JF (2016) A unified micromechanics-based damage model for instantaneous and time-dependent behaviors of brittle rocks. Int J Rock Mech Min Sci 84:187–196
Zhao Y, Yang T, Zhang P, Zhou J, Yu Q, Deng W (2017) The analysis of rock damage process based on the microseismic monitoring and numerical simulations. Tunn Undergr Space Technol 69:1–17
Zheng H, Li T, Shen J, Xu C, Sun H, Lu Q (2018) The effects of blast damage zone thickness on rock slope stability. Eng Geol 246:19–27
Zhou J, Wang J (2017) Lower bound limit analysis of wedge stability using block element method. Comput Geotech 86:120–128
Zhou X, Yang H (2012) Multiscale numerical modeling of propagation and coalescence of multiple cracks in rock masses. Int J Rock Mech Min Sci 55:15–27
Zhou H, Jia Y, Shao JF (2008) A unified elastic–plastic and viscoplastic damage model for quasi-brittle rocks. Int J Rock Mech Min Sci 45:1237–1251
Zhou X, Bi J, Qian Q (2015) Numerical simulation of crack growth and coalescence in rock-like materials containing multiple pre-existing flaws. Rock Mech Rock Eng 48:1097–1114
Zhou J, Wei J, Yang T, Zhu W, Li L, Zhang P (2018) Damage analysis of rock mass coupling joints, water and microseismicity. Tunn Undergr Space Technol 71:366–381
Zhu Y (2017) A micromechanics-based damage constitutive model of porous rocks. Int J Rock Mech Min Sci 91:1–6
Zhu Q, Shao J (2017) Micromechanics of rock damage: advances in the quasi-brittle field. J Rock Mech Geotech Eng 9:29–40
Zhu W, Tang C (2006) Numerical simulation of Brazilian disk rock failure under static and dynamic loading. Int J Rock Mech Min Sci 43:236–252
Zienkiewicz O, Kelly D, Bettess P (1977) The coupling of the finite element method and boundary solution procedures. Int J Numer Methods Eng 11:355–375
Funding
This work was conducted with supports from the National Natural Science Foundation of China (Grant Nos. 51474050 and U1602232), the Fundamental Research Funds for the Central Universities (N170108029), Doctoral Scientific Research Foundation of Liaoning Province (Grant Nos. 20170540304; 20170520341), and the Research and Development Project of China Construction Stock Technology (CSCEC-2016-Z-20-8).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Responsible Editor: Zeynal Abiddin Erguler
Electronic supplementary material
ESM 1
(PDF 409 kb)
Rights and permissions
About this article

Cite this article
Ahmed, Z., Wang, S., Hashmi, M.Z. et al. Causes, characterization, damage models, and constitutive modes for rock damage analysis: a review. Arab J Geosci 13, 806 (2020). https://doi.org/10.1007/s12517-020-05755-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12517-020-05755-3