
Abstract
Numerous researches have studied the development of robotics, especially socially assistive robots (SAR), including the NAO robot. This small humanoid robot has a great potential in social assistance. The NAO robot’s features and capabilities, such as motricity, functionality, and affective capacities, have been studied in various contexts. The principal aim of this study is to gather every research that has been done using this robot to see how the NAO can be used and what could be its potential as a SAR. Articles using the NAO in any situation were found searching PSYCHINFO, Computer and Applied Sciences Complete and ACM Digital Library databases. The main inclusion criterion was that studies had to use the NAO robot. Studies comparing it with other robots or intervention programs were also included. Articles about technical improvements were excluded since they did not involve concrete utilisation of the NAO. Also, duplicates and articles with an important lack of information on sample were excluded. A total of 51 publications (1895 participants) were included in the review. Six categories were defined: social interactions, affectivity, intervention, assisted teaching, mild cognitive impairment/dementia, and autism/intellectual disability. A great majority of the findings are positive concerning the NAO robot. Its multimodality makes it a SAR with potential.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the last decade, robot’s industry has expanded at an impressive speed. From the first industrial robot, Unimate, invented by George Devol in 1954 and commercialised by him and Joseph Engelberger in 1961, this field of research has come a long way [1]. We can now see all kinds of robots emerging, from the athletic robots to the socially assistive ones. They are all widely used in numerous contexts. Robotics represents a great avenue to contribute to solve problems, e.g. the engorgement of health care system, developing specific functions in many populations and stimulation of cognitive functions in elderly. According to [1], there are five robotics generation: Prototypes of Robotic, Robotics Arms, Walking Robots, Behavior Based Robots and Humanoid Robots. Currently, we are in the fifth generation of the development of robotics, namely the Humanoid Robots, since 1996. Thus, humanoid robots could be named socially assistive robots (SAR) because of their ability to simulate empathy by mimicking human gesture and to perceive emotions when programmed [2, 3].
Two main literature review on SARs have been published in the last few years, both concerning socially assistive robot for elderly [4, 5]. No literature review on SARs in general were found. First, [5] categorize the assistive robots for elderly in two categories, rehabilitation robots (assistive robotic devices) and socially assistive robots. The rehabilitation robots include intelligent wheelchair and exoskeletons. The second main category is socially assistive robot, which is itself divided in two types, namely service type robots and companion type robots. The service type robots are used to assist the person in daily activities, like eating, bathing and getting dressed. The Care-o-bot is an example of a service type robot [6]. The companion type robots are used to improve psychological well-being and health. The NAO robot would be part of this category, but there is not much studies concerning its uses until 2012. Furthermore, these categories are not exclusive; a social robot can be used in rehabilitation experiences or the other way around. The authors conclude their review by saying that companion type robots have proven to be effective in improving mood, loneliness and connection with others.
Since there has been numerous studies concerning SAR, [4] aimed to establish their value in eldercare. Thus, they described five roles that can be fulfilled by the robot, which are: (1) affective therapy, (2) cognitive training, (3) social facilitator, (4) companionship and (5) physiological therapy. The main findings of this study are that SAR significantly improved cognitive results, sociability and loneliness in line with the second, third and fourth roles. However, these positive effects have not been found in the affective therapy. Indeed, SAR enhances mood, but the improvement is comparable to a soft toy or a placebo robot, so one might question the financial benefits of using the robot for this only purpose. Finally, for the last set, physiological therapy, studies find positive effects of the robot on blood pressure. Although, they are hard to interpret because many external variables could influence the results obtained, like interaction with others or the affective therapy role of the robot (calming down the participant). Further research is thus needed to clarify the real impact of the robots.
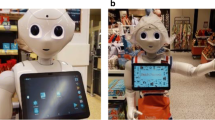
In this paper, we focus on the studies that exploit one specific model of humanoid robot, namely the NAO robot (Fig. 1). It is important to note that the NAO robot was referred to as the ZORA (Zorg [Health], Ouderen [Elderly person], Revalidatie [Rehabilitation], Animatie [Animation]) robot in some studies [7]. The ZORA robot is in fact a software specifically designed for rehabilitation and elderly care. The software is combined to the NAO robot and was named ZORA, but the platform used is the NAO. The NAO (or ZORA) is a biped robot that is 58 cm tall [8]. Launched in 2006, it has evolved from the first to the most recent version, namely the sixth one, in 2018 (see [9] for a presentation of the original design of the robot). It has 25 liberty degrees, allowing it to move and to adapt to the environment, two 2D cameras, seven tactile sensors, four directional microphones and speakers to interact with humans and the environment. Vocal recognition and dialogue are available in 20 different languages. Therefore, due to theses characteristics, the NAO is considered as an appropriate SAR. We decided to concentrate our review on this robot for several reasons. First, it is one of the most popular humanoid robots in the world. It is widely used in research, education and in healthcare services. Second, its relatively low price makes it both an affordable robot and an effective one. Third, the software used to program the robot, Choregraphe, is easy to use, which facilitates its usability among professionals who are not trained in robotics. Finally, since it is a polyvalent robot, assembling all the studies using it into one paper provides an overview of what has been done yet and where we can go in the future.

Softbank robotics Europe
The aim of this literature review is to collect every study that used the NAO robot, no matter the context, into one paper. To the best of our knowledge, there is no other study that focuses only on what has been done with this robot without being limited to a particular population (e.g. the elderly). This study will thus provide a better understanding of what could be more exploited concerning the NAO robot’s abilities for future research.
2 Methodology
2.1 Research Strategy
Four databases were exploited: PsychINFO, Computer & Applied Sciences Complete, ACM Digital Library and International Journal of Social Robotics. Since the aim of the present work is to review all the studies using the NAO robot, no matter the context, the research key words used were “NAO robot” and “Zora robot”, so that every research paper mentioning these robots were spotted. Only the studies written in English were included and there were no restriction concerning publication date. The papers found vary from 2012 to 2019 probably because the NAO robot was launched to the public in 2011. Therefore, it seems reasonable to assume that most clinical studies were published the next year or later. Also, studies focusing on technical progress on the robot were excluded, since it does not fulfill the purpose of this review. We observed, just as [4] did, that many studies have only a few participants or are just exploratory studies. It was decided that studies would not be excluded based on their methodological quality (e.g. sample size, lack of control of external variables) because this field of research is still new. Therefore, there are not many studies with strong methodology. Although, some studies lacked important information about the sample like number of participants, sex or gender, age, and characteristics (e.g. neurotypical, autism, dementia) and were excluded. In summary, if the study contained all the methodological information, it was included, but if information was missing, it was excluded.
2.2 Study Selection
The authors filtered the publications in a three-step assessment process based on the work of [4], as showed in Fig. 2. First, papers found using the key words “NAO robot” or “ZORA robot” were selected according to their title and index terms. Second, the abstracts were read to assess if the NAO was used experimentally in the studies and how (e.g. as a companion or a therapist assistant). Finally, full texts were read to evaluate the relevance of the studies with the purpose of this review. The first author proceeded to the review of the studies, and it was then validated by the other authors.

Schematic review process
2.2.1 Title and Keyword Assessment
In this first filter, only exclusion criteria were used, since the title does not always say much about what is said in the article. There were two exclusion criteria. First, when it was clear that the article assessed a technical improvement (e.g., programming, adding technical devices, improving functionalities like walking, movement, etc.). Second, the title sometimes clearly announced that the robot involved in the study was not the NAO. The fact was verified afterwards scanning the text. This could be explained by the fact that all the studies mentioning the NAO robot (or ZORA) were found, even when it was mentioned once in the introduction section or cited in the paper. In this phase, we were more sensible than specific to make sure not to exclude relevant papers.
2.2.2 Abstract Assessment
The abstract was then read to evaluate if the study seems to correspond to the purpose of the study. This phase was also more sensible than specific, so when in doubt, the study was selected for the text assessment. Here, exclusion criteria were also related to technical improvements and not using the NAO robot. Also, studies that clearly did not use the physical robot in an experimental context were excluded (e.g., virtual robot only, testing technical improvement). Papers that did not focus on the interaction between the robot and the human were excluded. For example, studies on acceptability only were excluded because there are reviews on the subject (e.g., Conti, Di Nuovo, Buono, & Di Nuovo, 2017). Finally, if the abstract clearly pointed that the sample did not interact with the robot (e.g., surveys), they were excluded.
2.2.3 Text Assessment
This filter is meant to be more specific than sensible. Therefore, only the papers fulfilling the purpose of the present survey, which is the use of the NAO robot in different contexts, were included. Exclusion criteria still included technical improvement, use of another robot than the NAO and acceptability only. It was also decided that studies would not be excluded based on their methodological quality. However, some papers lacked important information about sample (gender, age, and context) and were therefore excluded. Inclusion criteria were use of the NAO in an experimental setup, interaction between a robot agent and a human agent, comparison of the NAO with other robots. Studies on both technical improvements and the effect of these improvements on the interaction were included, but not the one that only tested the efficacy of the improvements. Finally, when more than one paper was found regarding the same study (e.g. congress communication and article on the same study), the most complete paper, which was usually the most recent publication, was kept.
2.3 Data Synthesis and Analysis
To synthesize the information found, groups were made according to the general theme and population with which the robot was used. These categories were decided retrospectively because they offer the better classification system to what was presented in the articles. This strategy is based on the work of [4], who also created subjective categories for the robot’s use.
3 Results
3.1 Search Results
Initially, 227 papers were found in the different databases and were selected for the review (see “Appendix” for the full list). The Fig. 2 represents the schematic review process of the articles. The final sample of studies that were reviewed is composed of 70 publications, all using the NAO robot. Together, the studies include 2 880 participants.
The studies selected will be presented according to the six defined categories: social interactions, affectivity, intervention, assisted teaching, mild cognitive impairment/dementia, and autism/intellectual disability. The categories were identified retrospectively to facilitate the understanding of the robot’s use.
3.2 Social Interactions
The studies focusing on social interactions in general were grouped in this category. Those studies (1403 participants) assess particularly the relationship between the human and the robot: attitudes of the users toward the robots, social engagement of the users (e.g. gaze, duration of speech, distance between robot and user), influence of matching personalities between human and robot, and general communication (Table 1).
3.2.1 Attitudes
Eight studies (578 participants) focused on the effect of the robot on the participants’ attitude. In a Japanese study, two NAO robots were used in a hotel to inform the guests about multiple services [9, 10]. The authors wanted to evaluate how users respond to robot’s different types of verbal interaction. In order to do so, they investigated if either direct or indirect (robot talking to the other robot) speech had the biggest impact on guests. The direct form of speech was represented by the robot giving information directly to the guests, whereas the indirect speech was represented by two NAO robots sharing information to each other, therefore giving the information indirectly to the guests. The results show that direct speech is more attractive to the guests, while indirect speech enhances human–human interactions. In another study also investigating the effects of direct or indirect speech, but this time with product advertising, the authors did not observe any difference between the two types of speech for changing the participants’ attitude towards the advertised product [11]. The results of the two previous studies show that the effect of direct and indirect speech is still not clear in human–robot interaction. Then, [12] examined the effect of the robot making communication errors (e.g. repeating itself, asking the user to repeat or not answering at all when it is supposed to) on the relation between the participant and the robot. The authors observed that the earlier the errors appear (i.e. at the beginning of the interaction) the better it is for the robot’s influence, which is preserved. Otherwise, latter errors will affect the capability of the robot to influence the user. In addition, if the errors occur after a good performance from the robot, they will be more harmful to the relation between the human and the robot. The authors explain this phenomenon by the contrast effect, a concept well known in social psychology [36]. In short, it refers to the fact that if one develops a positive attitude towards the object of attitude (in this case, the interaction with the robot), negative experiences will influence the person more, since it contrasts with the initial attitude. Therefore, if the errors occur at the beginning of the interaction, the attitude is not totally formed, and the robot can recover from this initial negative assumption. Also, [13] assessed the effects of the NAO being an in-group or an out-group member on the participants’ perception about the robot. To do so, they assigned the participants to different groups (i.e., blue or green group). In the in-group condition (blue team), participants were told the NAO was part of their team, whereas in the green group, the robot was not part of the team, but still present in the activity. Results showed that the participants perceived the NAO more positively and were more willing to interact with it when it was an in-group member than when it was not. In another study, using the Prisoner’s Dilemma and the Ultimatum Game, [14] found that participants cooperated more with the human than with the robot. The human was also perceived as more open and agreeable. However, they explain this result with the fact that even if they did not want neither of the agents (robot or human) to display emotions, they had no control over nonverbal body language of the human agent. Also, when the robot (and the human) used the Tit for Tat (TfT) technique (cooperate in first round, then copy what the other person chose for the next rounds), they were perceived as more extroverted and agreeable. In [15], they examined how human build rapport with a robot. They observed that the participants engaged in positive social behaviors such as thanking and complimenting the robot, which enhanced the rapport-building. Finally, the two last studies [16, 17] show that human tend to perceive the robot as trustworthy and are willing to follow their lead when facing an ambiguous decision.
3.2.2 Social Engagement
Ten studies (552 participants) investigated the social engagement in human–robot interactions. First, three studies were conducted to observe children-robot interaction. Two studies observed young children in a pretend play (or role play) and a playing game interaction with the NAO robot [18, 19]. In the first one, the authors observed that the children recognised the gender of the robot and adapted their behavior according to gender-based social rules. In line with this finding, concerning proxemics, they observed that children in general did not change their distance between them and the robot or decreased it when facing a male gender robot. However, when they were facing a female gender robot, boys significantly increased their distance between them and the robot. This finding indicates that: (1) children can recognize the gender identity of a robot and, (2) they interact with them considering gender-based social norms (gender separation). In addition, [20], who conducted a similar study on proxemics between children and robots, observed that younger children tend to stay further from the robot. Although, in their subsequent study, [19] observed that younger children are not able to identify correctly the gender of the robot, but they prefer to interact with a same-gender robot. Contrarily, older children recognised the gender of the robot. According to them, the matching gender was not important to children, although some mood variations were observed, being lower in opposite-gender condition than in the same-gender condition. Interestingly, children had more positive reactions when interacting with a female robot, regardless of their own gender. In two other Australian experimental studies, children were playing a snakes and ladders game and vocabulary learning with the robot [21, 22]. The aim of the studies was to assess the social engagement of the children with the robot concerning eye-gaze, gestures towards robot, etc. in a long-term interaction. Results show that the children’s social engagement was consistent throughout the sessions and that positive emotional feedback from the robot enhanced social engagement and learning. Also, duration of verbal responses increased, whereas facial expressions decreased over the sessions. Then, an experimental study conducted with adults evaluated their social engagement in the form of helping behavior induced by mimicry [23]. Their study is based on the chameleon effect, which triggers when someone mimics behaviors, postures or mannerisms of someone else [37]. This effect was shown to increase the mimicker’s likability. In this study [23], mimicry from the robot should enhance the helping behavior of the participant because of this increase in likability. The authors noted that a high mimicry rate (83%) increases likability of the robot, and therefore generates a positive impression of the robot. Also, the authors observed that the increased likability resulting from the high mimicry rate promoted willingness to help the NAO (form of social engagement) when the participants were explicitly asked to do so. Another study assessed the entertainment value of the NAO robot with adult participants playing the game Mastermind with the robot [24]. The authors observed that the behavioral pattern displayed by the robot resulted in more laughter, which effectively indicates an entertainment value of the robot. Two studies examined the engagement of children in learning activities. In [25], they observed that the embodiment (physical or virtual) did not impact their learning. They mention that it could be explained by the novelty effect, since the interactions lasted a short time. Although, they advanced that children spent more time looking at the physical robot than at the virtual robot, suggesting more social engagement. In their study, [26] use a physical and a virtual robot to teach children on healthy habits. They conclude that having a motivational agent (either physical or virtual robot) enhances healthy habit change. What the physical robot added was that the children achieved more their goals when interacting with this type of embodiment. Finally, [27] used the NAO robot in a theatre play as an actor in a care scenario. They wanted to see how the audience would respond. Interestingly, the play was perceived as engaging, entertaining and realistic, even though there were some technical problems. The robot was perceived as alive, responsive, kind, pleasant, intelligent and more.
3.2.3 Matching Personalities
Three studies (75 participants) evaluated the importance of matching personalities in the interactions between a human and a robot. Results show that a robot that matches the participant’s personality is essential for an appropriate interaction (e.g., extrovert robot for extrovert participant) and that a robot that adapts to the personality of the participant seems more engaging and natural than a robot that does not [28]. In an experimental study where the authors exposed participants to a stressing game and were coached by a robot with different personalities, the performance was not always increased when the participant was coached by a robot with a matching personality [29]. Finally, another study included other personality factors than extroversion and introversion, namely openness and neuroticism [30]. Results show that the mental state of the participant seemed to be in relation with the behavior the participants adopted during the interaction. In fact, positive mental states were related with more social engagement (longer duration of speech, laughter, short reaction time), whereas negative states were related with less social engagement (lack of laughter, negative speech and failure in the game). More work must thus be done to understand better the effects of personality in human–robot interactions.
3.2.4 Communication
Finally, one last important facet of social interaction concerns general aspects of communication, assessed by five studies (198 participants). It is known that when interacting with a robot, humans tend to use the same signals as in human–human interactions [31]. In this first study, the authors observed human–robot interactions and saw that participants tended to adapt to the robot’s need and capabilities, but this was sometimes difficult probably because of the lack of transparency in the robot’s verbal cues. Another study aimed to assess the influence of the robot’s gender [32]. When questioning participants in a preliminary study, results showed that people characterised the male voice as more trustworthy and were more willing to share personal information him. Although, when testing this fact experimentally, the robot’s gender seemed to be irrelevant because firstly, participants shared information equally with both robot’s genders. Secondly, some participants did not distinguish the robot’s gender (identify the wrong gender or describe the robot as genderless). More studies need to be done on how the gender of the robot affects human–robot interactions. Then, a study investigated the importance of sociofeedback given by the robot through audio messages and gestures [33]. In fact, it was found that audio messages are essential in delivering a sociofeedback, but gestures help to increase the clarity of the feedback, which is appreciated by the participants. Another study [35] concluded that iconic gesture is an important component of the communication, and in this study, on recall. Finally, the last study compared the participants’ responses to social actions (e.g., greeting and goodbye) and practical actions (e.g., handing the questionnaire) made by the robot [34]. The outcomes of the study were that practical actions were more responded when participants felt familiarity, the social actions were intensified when robot’s sociability was higher, and that the more practical actions were adequately responded by the participants, the more they responded to social actions.
3.3 Affectivity
Nine studies (291 participants) assessed the affectivity value of the NAO robot. To be an effective SAR, it is essential for the robot to be able to perceive and express emotions [3]. Also, according to the same authors, empathy, or the capacity to demonstrate that one’s feelings are understood or shared, is a necessary capacity for a robot to have, since it is crucial to social interactions (Table 2).
3.3.1 Emotion Expression
Since the NAO robot cannot express emotions through facial expression, unless with changing colors eye LED, one might think that this is an obstacle to emotion expression for this robot. Nonetheless, six studies (254 participants) assessed the NAO robot’s emotional expression capabilities through affective bodily expressions. In the first two studies, the authors implemented affective bodily expressions [38, 39]. Cohen, Looije and Neerincx [38] assessed the recognition rate, meaning that the robot (NAO or iCat) expressed an emotion (e.g. sad, happy, fear) and the child had to recognize it. Then, they compared the recognition rates of the NAO, which expressed emotions through postures, and of the iCat robot, which used facial expression. Results show that in general, recognition rates were significantly higher for the iCat than for the NAO, but when comparing each emotion separately, there is no significant difference between the two recognition rates, which shows that both robots can express emotions and that facial expression is not an essential component of emotional expression. They also found that expressing the emotion in a context enhanced the recognition of that affective state. Furthermore, children mentioned that they preferred the NAO robot to the iCat, because the NAO seems to be perceived as more trustworthy and friendly. Also, in [42], they conclude that children can identify emotions displayed by a NAO robot correctly, and they add that there is no significant difference between them and adults apart from anger emotion. This emotion was less perceived by the children. The results of another study show that bodily expression of the robot’s mood has a contagion effect on the participants, explicitly and implicitly. The robot’s mood influenced the participants’ performance in the difficult condition of an imitation game, a positive mood from the robot having a negative effect on performance because the participants were more entertained [40]. In addition, in a Swedish experimental study, participants had to communicate emotions to the robot through touch [41]. The results showed that males and females conveyed emotions to the robot differently from one another. Females tended to touch the NAO longer, to touch more locations and to use more varied ways to touch the robot for every emotion. However, the participants touched the robot longer when expressing sadness, regardless of the gender. Finally, in [43], they evaluated how humans perceived the robot’s emotions through human nonverbal behavior (moving head, arms, torso) and robotic-specific nonverbal behavior (changes in eyes color). They conclude that both nonverbal behaviors increase the perceived animacy of the robot, positive affect and self-disclosure. They also add that combining these behaviors increase these characteristics even more. Thus, when the NAO told its happy story, participants felt more positive and less negative.
3.3.2 Empathy
Three studies (37 participants) evaluated the role of empathy of the NAO robot interaction with participants. Considering affective factors is essential when investigating social interactions between a robot and a human [3]. In an experimental study, [2] assessed the robot’s empathic behavior and the participants’ perception of the robot’s empathy. In this study, the robot correctly realised the intended empathic goal, since it was recognized by the participants. Thus, the robot’s cognitive empathy (understanding of the participant’s emotion) was higher than its affective empathy (feel the participant’s emotion), regardless of age and gender. In the last study in this category, [44] used a quiz game to assess the children’s perception of an affective and a non-affective NAO robot. While the affective robot enhanced positive expression, behavior and empathy perceived by the children, the non-affective robot was perceived as more trustworthy. Although, the affective robot was preferred by the children because of its bodily expression of emotions and its adaptability to the children.
3.4 Intervention
Thirteen studies (519 participants) investigated the use of a NAO robot as a therapist. The robot was used as an interviewer, in evaluation/recommendations, and in physical interventions (Table 3).
3.4.1 Interviewer
Three studies (32 participants) assessed the interviewer value of the NAO robot. The first study compared the NAO robot to a human interviewer to conduct an employment interview [45]. Results showed no significant difference between the human and the robot interviewers, which suggests that the NAO robot is a conceivable interviewer. Then, a pilot study introduced a NAO robot in a working environment [46]. The robot had to motivate the workers to get up of their chair and to follow the robot in doing a routine. The authors observed that the employees rarely rejected the request from the robot and almost always performed the routine. Also, they noted that the robot helped breaking the hierarchical boundaries. In another study, a NAO robot was programmed to conduct a motivational interview [47]. Motivational interview is a psychological intervention that enhances behavior changes. In this study, the robot had to encourage physical activity among the participants. The main positive outcomes were that the participants enjoyed their interaction with the robot and liked the neutrality of the robot. Participants felt unhurried since the robot did not interrupt them, and more comfortable since the robot did not judge them. Some participants even pointed out that the interview had an impact on their behavioral change.
3.4.2 Evaluation and Recommendations
Three studies (215 participants) evaluated the potential of the NAO robot as a therapist. In an experimental study with children of 9.5 years old (in average) having cancer, the authors used a robot as a psychologist assistant [48]. The robot participated in a therapy with a psychologist for children having cancer and they were compared to a control group having a conventional therapy with a psychologist only. The study’s results show that using a robot as a psychologist decreased anxiety, depression and anger significantly when compared to the control group having the traditional psychotherapy. Authors advance that the robot, just like peers, increase the children’s self-esteem and make them feel more supported than with an adult. Also, the authors conclude that a humanoid robot was useful to calm the children by teaching them about their illness and methods to relax and to take control of their situation. In another study, the robot was used to do a medical interview simulation and was compared with a human physician [49]. Albeit both human and robot were significantly credible on credibility scale, the human physician was rated higher in credibility than the robot and had a greater positive impact on the patients. Although, this relationship between credibility and physician (human or robot) was mediated by the perceived social presence of the physician, which was higher for the human. Thus, using a NAO robot in combination with traditional physician in a medical interview might be a great avenue in the health service system. In the last study, the NAO robot was used to assess the stress level of the participants using a low to high level of politeness [50]. Then the robot made recommendations on how to reduce the participant’s stress. Results of the study show that the robot needs to adapt its politeness level to the different users, because a high level of politeness is not always appropriate, and does not always have positive effects on the user’s compliance to the robot’s recommendations on how to reduce the user’s stress. The authors conclude by saying they believe that human-like robots might be a great avenue in the healthcare service because they might be perceived as more acceptable helpers than other technologies.
3.4.3 Medical and Physical Interventions
Seven studies (272 participants) used the NAO robot and three studies (109 participants) as a rehabilitation assistant. The robot had to assist a physiotherapist by showing the movements to the patients. The main findings were that the robot enhanced the quality of the movements of the patients, more than a virtual robot, probably because of its physical presence [51]. In addition, the robot adapted the speed of the movement to the patient, which made the patients pay more attention to the movements performed by the robot. When the NAO performed a movement slowly, patients also adapted to the pace of the robot, which improved the quality of their movements. Two main issues were noted in the studies. First, due to the robot’s physical limitation, some movements were not correctly modeled by the robot (i.e. the optimal distance for some movements was not reached by the robot, so by the patients too). Also, there were some trust issues from the therapists concerning the advices given by the robot in the other study, but the authors mentioned that it was probably due to the therapists’ short exposure time to the robot [52]. Nevertheless, the robot was well accepted by the patients, the therapists and the parents for the study with children [58]. In a similar study concerning paediatric rehabilitation, [54] achieved similar results, saying that the robot was well accepted by the children. The professionals also agreed that it would be an interesting tool to use in rehabilitation. Three studies [55,56,57] used the ZORA robot as a rehabilitation assistant. The first two studies focused on children with physical disabilities. The robot was used in rehabilitation sessions, taking the professional role of instructor, demonstrator, etc. The authors wanted to see if a robot-based intervention would help in achieving goals in four domains: movement skills, communication skills, cognitive skills and attention skills [55, 56]. The professionals (physiotherapists, speech language therapists and others) were present in the session. The main outcome of these studies is that the robot enhanced achievement of goals, especially in the movement and communication skills. Also, using the robot allowed the professionals to concentrate all their attention on the observation of the patient, which they appreciated. The last study was also a pilot study to incorporate a ZORA robot in a geriatric rehabilitation hospital and in two service care homes [57]. Participants mainly mentioned that using a robot requires many adjustments and resources like knowledge, skills, time and organizational infrastructures. Also, when planning to use the robot, participants pointed out the necessity to know what the customers’ needs are in advance. Nevertheless, participants enjoyed the robot and thought it was cute and sympathetic. Although, there were problems with people that had vision or hearing impairments (e.g., small robot size, quiet voice, no lip-reading possible). Finally, one study used the NAO robot with children diagnosed with diabetes [53]. The NAO assisted in the weekly appointments and educated them on diabetes. The results showed that the children appreciated their interactions with the robot and that it made their visit more positive.
3.5 Assisted Teaching
Another field of application of SAR that has been explored is robot-assisted teaching. Ten studies (401 participants) assessed the utility and effects of a NAO robot in this type of environment. Particularly, the robot was used as a teaching-assistant in schools, for sign language learning and as a trainer-assistant (Table 4).
3.5.1 Schools
Seven studies (206 participants) used the robot in a classroom. The participants were all aged between 9 and 12 years old. NAO would be a great avenue to assist teaching in the future because it uses multi-modal interaction that meets all three sensorial modalities essential in learning, namely auditory, visual and kinaesthetic [58]. Also, the children think that using a robot to assist teaching is a positive idea. According to [59], children as young as six years-old are adequately cognitively developed to be able to interact with a NAO robot. In one of the studies, children specifically appreciated the fact that the NAO robot was programmed to adapt to their emotions (understand children’s feelings and share its own emotions), memory (e.g., remembering name or previous performance) and personality (being introvert or extravert according to the child’s personality) [60]. In addition, when the NAO robot is compared to another robot (in this case, EMYS robot), children perceive the NAO as more friendly, pleasant and empathic, probably due to its capacity to express emotions through body language [61]. Although, the three papers mention some limitations in the usability of the NAO robot in schools. Mainly, the robot would have to follow the learning rhythm of the children, because they do not learn at the same pace, and to not make fast moves or quick responses so the children do not get scared of the robot. Furthermore, one of the greatest challenges would be to address the technological difficulties that could be experienced in a long-term children-robot interaction. Another study used the NAO robot in a robotic-assisted language learning class [63]. The authors wanted to see how the robot could reduce the anxiety of learning a new language. They conclude that the robot helped to reduce the participants’ anxiety, enabling them to learn better. The students were reassured by the mistakes the robot would make (intentionally), were less anxious when their name was called out and had more fun in the class. Concerning academic education of adults, an experimental study exploited the NAO robot to perform a patient simulation [62]. The participants had to perform a common behavioral procedure with the patient (NAO or human). Results showed that the performance of the participants were similar when facing a robot or a human actor. In addition, the learnings the participants made could be generalized to working with real children. Finally, an interesting article [64] used the robot in a reversed teaching experimental study. They used the NAO to act like a child that learns how to write, and the children had to teach it how to write letters. They observed that the children improved their own writing when the robot was learning than when it was not. They also pointed out that children liked being the robot’s tutor and it had positive impact on their self-evaluation.
3.5.2 Sign-Language
Two studies (183 participants) examined the NAO robot’s potential in teaching sign language. Both studies compared participants with and without sign language acquaintance. The two researches come to the same conclusion that sign language knowledge influences the performance [65, 66]. Effectively, if one already has experience in sign language, one might be able to recognize the signs faster and more accurately than the participant that has no knowledge in this language. In addition, if the robot’s movements are not precise enough, the participant with anterior experience would be able to differentiate the target words from other words that look alike when signed but have different meanings. Also, the two studies noted that physically embodied robots are way more effective than virtual robots. The effect of sign language acquaintance is important when interacting with the physical robot, whereas this effect is not present when confronted to a virtual robot, since the performance of each group (with and without sign language acquaintance) had similar performances with the virtual robot. The main limit in the usability of the robot in this field of research might be its limited physical capacities, since it only has four fingers.
3.5.3 Trainer-Assistant
Finally, the last study (12 participants) evaluated the effectiveness of a dancing activity among hospitalised children [67]. The robot had to demonstrate the movements and the child had to imitate them. The authors concluded that the robot enhanced participation and involvement of the child, probably because of the creativity and active participation the activity required, instead of following instructions only. Although, the study noted a decreased of involvement over the sessions. Long-term studies will be necessary to assess the effect of long-term interaction with robot teaching assistants.
3.6 Mild Cognitive Impairment and Dementia
Five studies (185 participants) used the NAO robot with participants with mild cognitive impairment or dementia. Two studies focused on intervention among elderly with dementia or with mild cognitive impairment. The two other studies were more interested in the interaction between elderly and the robot (its acceptability) (Table 5).
3.6.1 Robot-Assisted Intervention
Three studies (128) used the NAO robot in interventions with participants with dementia or mild cognitive impairment. The first study used a memory training program to assess cognitive functions, e.g. episodic memory, verbal long-term memory, short-term memory, visual attention, etc. as main outcome measure [68]. They also measured anxiety and depression symptoms. According to them, the NAO increased the participants’ attention during the task and decreased depressive symptoms. The second study focusing on therapy for elderly with dementia is a comparative study involving the NAO robot, the Paro and a dog [69]. In this study, the NAO was compared to the Paro robot, but not with the dog. Interesting results concerning the NAO were that it decreased apathy, delusions and irritability. When compared to the Paro, there is no significant difference between them. The two studies conclude that a robot-assisted approach would be a great avenue as a non-pharmacological intervention, since it enhances engagement from the users and improves global neuropsychiatric symptoms when a robot is included in therapy sessions. Even if this robot represents a good alternative to pharmacological treatments, some studies are evaluating the use of a NAO robot to perform a medication sorting task to help people that need to take multiple medications (see [73]). In another study among elderly participants, [70] included the NAO robot in the KSERA system (Knowledgeable SErvice Robots for Aging). This system is an intelligent apartment containing captors and intelligent devices to help elder people to live longer in their home, independently. Although this study did not imply patients with dementia or mild cognitive impairments, it is interesting because of the possible avenue concerning this population. In the study, participants accepted and used the KSERA system more when interacting with a NAO. It was perceived as harmless, trustworthy, and comforting. The NAO robot seems like a good agent to connect the elderly with the KSERA system and with the external world.
3.6.2 Interactions and Acceptability
The two other studies (57 participants) focused on how the robot was useful and how the elderly perceived it. In the first Greek pilot study, they conducted a focus group where participants experimented the Email-Handler and Cognitive exercise RApps (see [71] for more information). The results of the focus group indicate that the robot must be as simple to use as possible for elderly with dementia or mild cognitive impairment, so nothing that requires memory like passwords or complicated commands. It must be clear enough for them to understand the robot. Nevertheless, participants enjoyed their time with the robot and found it easy to use. Finally, an experimental study (49 participants) observed the subjects interacting with the NAO [72]. Most of the participants enjoyed their interaction with the robot. Also, interestingly, they pointed out that age and dementia, but not the gender, influenced negatively the interaction between the user and the robot.
3.7 Autism and Intellectual Disability
Seven of the collected studies (81 participants) assessed the utility of the NAO robot with participants diagnosed with autism spectrum disorder (ASD) or an intellectual disability (ID). All the studies on ASD concerned children, and one of them also assessed adults with ASD. One final study compared the effects of the NAO robot between ASD and ID participants (Table 6).
3.7.1 Autism
Six studies (70 participants) assessed the social engagement among ASD participants with the NAO robot. A first study used a motor imitation task to see how children with autism would respond. Results were variable and the authors suggested that there might exist subgroups of children with autism that would behave differently to the robot [74]. Indeed, more recently, [75] proposed three subgroups with different behavioral response to the robot in their first study. In this second one, they compared how participants from each group behaved when interacting with the robot. Children from the first group had more difficulty to focus their attention on the robot. The second and third groups did not switch their attention from the robot to another stimulus in the environment. The child from the third group was the only one to interact with the robot (wave back at it). Also, [78] experimented a joint attention task among ASD children. The authors observed that when both human and robot agents used cues like pointing, gazing or giving vocal instructions, the children’s performance to the task increased. Albeit, pointing was the most engaging cue, more than gaze and vocal instructions. Two other studies concluded that the robot facilitated social engagement of ASD children. In the first one [76], the social engagement was reflected by an increase in the frequency of eye contact, its duration and the frequency of verbal initiation. In the second research [77], the NAO robot assisted music therapy sessions for 6 weeks. Over the weeks, the authors observed that the children increasingly imitated the robot, while the therapist’s prompts decreased. Then, only one study (32 participants) compared ASD children with typical development (TD) ones [79]. In the NAO robot condition, both groups had lower performances in a joint attention elicitation task than in the human condition, although ASD children had an even lower score than TD ones. The authors proposed that the NAO robot was less engaging than the human partner. It was the only study to achieve a more negative outcome from the NAO robot. All the other studies observed that ASD children showed interest in the robot. The NAO robot represents a good avenue for future intervention programs, since it could be used as an example to imitate or to do modeling training for ASD children to practice social interaction (i.e., eye contact; [76]).
3.7.2 Intellectual Disability
Finally, only one study (11 participants) included adult participants with intellectual disability or ASD. In the study, the authors used interaction activities and a Bingo Musical activity, executed by the NAO, with participants diagnosed with ASD or ID [80]. According to the results, patients with ID do not interact the same way ASD participants do. In fact, participants with ID showed lower engagement toward the robot and they had more difficulty to follow the instructions given by a robot than by a human, whereas the opposite effect is seen with ASD participants. The main utility of the NAO concerning ID participants would be to decrease the workload of the caregivers. Indeed, using NAO robot lowers the mental demand and effort required to the caregivers to take care of the participant.
4 Discussion
Robotics evolved at an incredible speed, and the NAO robot is one of the most popular models. A great variety of studies have been done on this subject. The aim of the present survey is to bring together as many articles as possible investigating the utility of the NAO robot. Since the growing literature on the subject might be overwhelming, this study helps in knowing at what point we are in using the NAO robot as a SAR. In order to differentiate the different roles of the robot, six categories of usability were created subjectively by the authors, namely social interactions, affectivity, intervention, assisted teaching, mild cognitive impairment/dementia, and autism/intellectual deficiency.
In the first category, social interactions, it was shown that understanding the factors involved in the interactions between a human and a robot is crucial. The NAO robot can be used as an advertiser to influence people by communicating through different kind of speech (direct and indirect). In addition, enhancing social engagement of a robot is a very important part of the interactions, since it allows the users to be more comfortable with the robot and increases likability and positive attitude towards the robot. Also, the personality seems to be an important variable in the human–robot interactions, especially extroversion. The studies show that matching personalities might improve the relationship with a robot, although this effect is still unclear, and more studies are needed to be done. The communication process and perceptions of the robot are essential when investigating the social interactions between a human and a robot.
In the affectivity category, the main outcome from the authors is that it is essential for a SAR in general to be an empathic device. Studies have shown that an empathic robot is well perceived by the participants because it can understand their emotions and express emotions through gestures. Effectively, since the NAO robot cannot use facial expression to express its emotions, authors show that using audio information and body gesture is enough for the participants to correctly recognise the conveyed emotions.
The intervention category shows a great avenue of the NAO robot. In fact, authors show that it has great potential in interviewing and in intervention, particularly in motivational therapy in the presented studies. Also, the robot was able to evaluate participants using tests and to make recommendations after classifying them in certain categories. Authors advance that SARs could have a great potential in healthcare system, since it is multifunctional and is perceived as more acceptable by people. In addition, the NAO was used to assist physical intervention by modeling the movements to the patients. Although the robot was useful to improve the quality of the movements done by the participants, the physical limitations of the robot are still an obstacle, since some movements were not optimally modeled by the NAO.
The studies in the category of assisted training all mention that using a NAO robot as a teacher or a coach is a great technology improvement, even though some obstacles are still in the way. In schools, students seem to appreciate the contact with the robot. Its efficacy in this field of application is mainly due to its multimodal interaction, since it uses the auditive, visual and kinaesthetic modalities when interacting with the students. There are some limits to the robot in assisted teaching, such as following the learning rhythm of the children, technical problems and physical limitations (more important in sign language teaching).
Using the robot in mild cognitive impairment and dementia patients is a promising avenue in future research. As [4] show in their review on SAR in elderly, they are widely experimented in this field of application. Although, there are not that many studies investigating usability of the NAO robot among this population. The studies presented show a positive impact of the NAO when interacting with people with dementia or mild cognitive impairment. It is easy to use, and it can either be a cognitive trainer or a companion.
Finally, the last category consisted of studies dedicated to the use of a NAO robot with participants having either ASD or ID. Using a NAO robot to improve social relations skills among this population is effective, since modeling learning. Nonetheless, studies’ results vary concerning social engagement, since one says the robot enhances it, whereas another say it does not. More studies are needed to improve our knowledge on the effect of using a NAO robot with this population. Also, since the field of research is still new, studies are developing ways to use the robot to help in the diagnosis of ASD (see [81]).
4.1 Limitations
The first limitation of this literature review is the probability to have excluded or to have not found a relevant article on the subject. Even if the initial set of studies did not include that many studies (N = 139), there is a risk that some studies were not spotted or were excluded too quickly. Also, the fact that we did not have interrater agreement in our study selection process could be a limitation, even though all the authors validated the list.
Second, the categories that were made in this review are totally subjective, which might not be as representative as other possible categories. In addition, some studies could have been classified in more than one category, but the choice was made according to the main outcomes. Therefore, the reliability of the categories could be questioned.
Finally, even if methodological quality was not an exclusion criterion, some studies do not mention the sex or the age of the participants, which means that the results must be interpreted with caution. Also, some sample sizes were very small and limits the power of the analysis and the results of these studies.
4.2 Future Research
As mentioned before, SAR is an expending literature and it will continue to grow in the next years, because of all the technological advances that are made. In fact, more research needs to be done in all the field of applications explored in this review, since new progress is made every day concerning robots. Although, future studies must consider how the humans interact and perceive the robots, and how the robot can adapt to the people to create a personalized interaction. Also, as mentioned in [4], future studies should be more careful when choosing outcome measures, since performance or social interaction components such as laughter or duration of eye-gaze are not certainly relatable measures. Finally, the duration of almost all the studies are very limited, so it would be very interesting to investigate the effects of a cohabitation with a humanoid robot. Long-term studies are needed to assess such type of effects.
5 Conclusion
This study focused on one specific robot, the NAO robot. This robot is a SAR that is used in various contexts because of it’s multifunctionality. Although its usability presents a positive avenue, there is still room for progress, whether concerning the methodological issues of the studies or the technological improvements that are to come. According to the studies presented in this review, the NAO robot has a great potential as a SAR because of its capability to be adaptative and multifunctional. The NAO seems to benefit to both the professionals that would use them and to the users who will interact with it.
Studying human–robot interaction is a complex field of research. Six categories were defined in the presented surveys: social interactions, affectivity, intervention, assisted teaching, mild cognitive impairment/dementia, and autism/intellectual disability. The NAO robot showed both strengths and weaknesses in these categories. First, social interactions are essential to be assessed to understand how human–robot interactions work. It was found that the attitude of the participants towards the robot is mainly positive, but this relation can be modified by the technical errors made by the robot. Also, reversely, the robot can influence the user’s attitude in advertisement. Moreover, the effects of matching personalities are not clear in the presented results. It would be interesting to explore other dimensions of the personality than only extroversion and introversion, as Bechade, Dubuisson Duplessis, Sehili et Devillers (2015) tried to do. Second, affectivity is a key component in interactions between users and robots. The NAO robot is an effective platform to both perceive and express emotions accurately using bodily embodied expressions. In addition, it can be programmed to be an empathic robot. Third, as a therapy assistant, results show that the NAO reduced stress and anxiety in a psychological therapy. It is also effective in enhancing motivation among participants, but long-term studies are needed to clarify this effect. In physical therapy, the NAO is a great model for the participants to imitate, despite some physical limitations of the robot, which limit the movements it can do. Fourth, the robot was an efficient teacher or a coach assistant. Its greatest advantage is its use of multiple learning modalities (visual, auditive and kinaesthetic). However, disadvantages consisted of adapting to the rhythm of the children, technical issues and physical limitations. Fifth, with mild cognitive impairment and dementia patients, the NAO robot seems to be a good cognitive trainer and companion. Finally, concerning participants with ASD or ID, the NAO robot was very practical in improving social skills by modeling learning.
To conclude, the use of the NAO robot is very large and has a great potential, and research still needs to be done to better understand these constructs. We think that multidisciplinary teams can consider exploiting the robot for more advanced applications.
References
Roshidul H, Shariff ARBM, Blackmore BS, Aris IB, Ramli ARB, Hossen J (2010) High adoption of behavior based robotics in the autonomous machines. J Inf Syst Technol Plan 3(6):30–41
De Carolis B, Ferilli S, Palestra G (2016) Simulating empathic behavior in a social assistive robot. Multimed Tools Appl 76(4):5073–5094. https://doi.org/10.1007/s11042-016-3797-0
De Carolis B, Ferilli S, Palestra G, Carofiglio V (2015) Modeling and simulating empathic behavior in social assistive robots. In: Proceedings of the 11th biannual conference on Italian SIGCHI chapter. ACM, pp 110–117
Abdi J, Al-Hindawi A, Ng T, Vizcaychipi MP (2018) Scoping review on the use of socially assistive robot technology in elderly care. In: BMJ Open. England, vol 8, p e018815 https://doi.org/10.1136/bmjopen-2017-018815
Broekens J, Heerink M, Rosendal H (2009) Assistive social robots in elderly care: a review. Gerontechnology 8(2):94–103
Graf B, Hans M, Schraft RD (2004) Care-O-bot II—development of a next generation robotic home assistant. Autonomous Robots 16(2):193–205
Martinez-Martin E, del Pobil AP (2018) Personal robot assistants for elderly care: an overview. In: Personal assistants: emerging computational technologies. Springer, Cham, pp 77–91
SoftBankRobotics. NAO. Available: https://www.softbankrobotics.com/emea/fr/nao
Gouaillier D, Hugel V, Blazevic P, Kilner C, Monceaux J, Lafourcade P, et al (2009) Mechatronic design of NAO humanoid. In: 2009 IEEE international conference on robotics and automation. IEEE, pp 769–774
Pan Y, Okada H, Uchiyama T, Suzuki K (2015) On the reaction to robot’s speech in a hotel public space. Int J Soc Rob 7(5):911–920. https://doi.org/10.1007/s12369-015-0320-0
Lopez A, Ccasane B, Paredes R, Cuellar F (2017). Effects of using indirect language by a robot to change human attitudes. In: Proceedings of the companion of the 2017 ACM/IEEE international conference on human–robot interaction. ACM, pp 193–194
Lucas GM, Boberg J, Traum D, Artstein R, Gratch J, Gainer A, et al (2018) Getting to know each other: the role of social dialogue in recovery from errors in social robots. In: Proceedings of the 2018 ACM/IEEE international conference on human–robot interaction. ACM, pp 344–351
Kuchenbrandt D, Eyssel F, Bobinger S, Neufeld M (2013) When a robot’s group membership matters. Int J Soc Rob 5(3):409–417. https://doi.org/10.1007/s12369-013-0197-8
Sandoval EB, Brandstetter J, Obaid M, Bartneck C (2016) Reciprocity in human–robot interaction: a quantitative approach through the prisoner’s dilemma and the ultimatum game. Int J Soc Robot 8(2):303–317
Seo SH, Griffin K, Young JE, Bunt A, Prentice S, Loureiro-Rodríguez V (2018) Investigating people’s rapport building and hindering behaviors when working with a collaborative robot. Int J Soc Robot 10(1):147–161
Wang B, Rau PLP (2019) Influence of embodiment and substrate of social robots on users’ decision-making and attitude. Int J Soc Robot 11(3):411–421
Stanton CJ, Stevens CJ (2017) Don’t stare at me: the impact of a humanoid robot’s gaze upon trust during a cooperative human–robot visual task. Int J Soc Robot 9(5):745–753
Sandygulova A, O’Hare, GMP (2016) Investigating the impact of gender segregation within observational pretend play interaction. In 2016 11th ACM/IEEE international conference on human–robot interaction (HRI). IEEE, pp 399–406
Sandygulova A, O’Hare GM (2018) Age-and gender-based differences in children’s interactions with a gender-matching robot. Int J Soc Robot 10(5):687–700
Tokmurzina D, Sagitzhan N, Nurgaliyev A, Sandygulova A (2018). Exploring child–robot proxemics. In: Companion of the 2018 ACM/IEEE international conference on human–robot interaction. ACM, pp 257–258
Ahmad MI, Mubin O, Orlando J (2017) adaptive social robot for sustaining social engagement during long-term children–robot interaction. Int J Hum Comput Interact 33(12):943–962. https://doi.org/10.1080/10447318.2017.1300750
Ahmad MI, Mubin O, Shahid S, Orlando J (2019) Robot’s adaptive emotional feedback sustains children’s social engagement and promotes their vocabulary learning: a long-term child–robot interaction study. Adapt Behav 27(4):243–266. https://doi.org/10.1177/1059712319844182
Shinohara Y, Mitsukuni K, Yoneda T, Ichikawa J, Nishizaki Y, Oka N (2018) A humanoid robot can use mimicry to increase likability and motivation for helping. In: Proceedings of the 6th international conference on human–agent interaction. ACM, pp 122–128
Johnson DO, Cuijpers RH, Pollmann K, van de Ven AAJ (2016) Exploring the entertainment value of playing games with a humanoid robot. Int J Soc Rob 8(2):247–269. https://doi.org/10.1007/s12369-015-0331-x
Kennedy J, Baxter P, Belpaeme T (2015) Comparing robot embodiments in a guided discovery learning interaction with children. Int J Soc Robot 7(2):293–308
Ros R, Oleari E, Pozzi C, Sacchitelli F, Baranzini D, Bagherzadhalimi A et al (2016) A motivational approach to support healthy habits in long-term child–robot interaction. Int J Soc Robot 8(5):599–617
Jochum E, Vlachos E, Christoffersen A, Nielsen SG, Hameed IA, Tan ZH (2016) Using theatre to study interaction with care robots. Int J Soc Robot 8(4):457–470
Aly A, Tapus A (2015) Towards an intelligent system for generating an adapted verbal and nonverbal combined behavior in human–robot interaction. Auton Robots 40(2):193–209. https://doi.org/10.1007/s10514-015-9444-1
Dang T-H-H, Tapus A (2014) Stress game: the role of motivational robotic assistance in reducing user’s task stress. Int J Soc Robot 7(2):227–240. https://doi.org/10.1007/s12369-014-0256-9
Bechade L, Dubuisson Duplessis G, Sehili M, Devillers L (2015). Behavioral and emotional spoken cues related to mental states in human–robot social interaction. In: Proceedings of the 2015 ACM on international conference on multimodal interaction. ACM, pp 347–350
Pelikan HRM, Broth M (2016) Why that nao? How humans adapt to a conventional humanoid robot in taking turns-at-talk. In Proceedings of the 2016 CHI conference on human factors in computing systems. ACM, pp 4921–4932
Behrens SI, Egsvang AKK, Hansen M, Møllegård-Schroll AM (2018) Gendered robot voices and their influence on trust. In: Companion of the 2018 ACM/IEEE international conference on human–robot interaction. ACM, pp 63–64
Tahir Y, Dauwels J, Thalmann D, Magnenat Thalmann N (2018) A user study of a humanoid robot as a social mediator for two-person conversations. Int J Soc Robot. https://doi.org/10.1007/s12369-018-0478-3
Baddoura R, Venture G (2013) Social vs useful HRI: experiencing the familiar, perceiving the robot as a sociable partner and responding to its actions. Int J Soc Robot 5(4):529–547. https://doi.org/10.1007/s12369-013-0207-x
van Dijk ET, Torta E, Cuijpers RH (2013) Effects of eye contact and iconic gestures on message retention in human–robot interaction. Int J Social Robot 5(4):491–501
Sherman SJ, Ahlm K, Berman L, Lynn S (1978) Contrast effects and their relationship to subsequent behavior. J Exp Soc Psychol 14:340–350
Cahrtrand Tanya L, Bargh John A (1999) The Chameleon effect: the perception-behavior link and social interaction. J Person Soc Psychol 76(6):893–910
Cohen I, Looije R, Neerincx MA (2014) Child’s perception of robot’s emotions: effects of platform, context and experience. Int J Soc Robot 6(4):507–518. https://doi.org/10.1007/s12369-014-0230-6
Read R, Belpaeme T (2016) People interpret robotic non-linguistic utterances categorically. Int J Soc Robot 8(1):31–50. https://doi.org/10.1007/s12369-015-0304-0
Xu J, Broekens J, Hindriks K, Neerincx MA (2015) Mood contagion of robot body language in human robot interaction. Auton Agent Multi-Agent Syst 29(6):1216–1248. https://doi.org/10.1007/s10458-015-9307-3
Andreasson R, Alenljung B, Billing E, Lowe R (2017) Affective touch in human–robot Interaction: conveying Emotion to the Nao Robot. Int J Soc Robot 10(4):473–491. https://doi.org/10.1007/s12369-017-0446-3
Beck A, Cañamero L, Hiolle A, Damiano L, Cosi P, Tesser F, Sommavilla G (2013) Interpretation of emotional body language displayed by a humanoid robot: a case study with children. Int J Soc Robot 5(3):325–334
Rosenthal-von der Pütten AM, Krämer NC, Herrmann J (2018) The effects of humanlike and robot-specific affective nonverbal behavior on perception, emotion, and behavior. Int J Soc Robot 10(5):569–582
Tielman M, Neerincx M, Meyer J-J, Looije R (2014) Adaptive emotional expression in robot-child interaction. In: Proceedings of the 2014 ACM/IEEE international conference on human–robot interaction. ACM, pp 407–414
Ahmad MI, Mubin O, Patel H (2018). Exploring the potential of NAO robot as an interviewer. In: Proceedings of the 6th international conference on human–agent interaction. ACM, pp 324–326
Brandstetter J, Liebman N, London K (2015) Fidgebot: working out while working. In: Proceedings of the tenth annual ACM/IEEE international conference on human–robot interaction extended abstracts. ACM, pp 149–150
da Silva JGG, Kavanagh DJ, Belpaeme T, Taylor L, Beeson K, Andrade J (2018) Experiences of a motivational interview delivered by a robot: qualitative study. J Med Intern Res 20(5):e116
Alemi M, Ghanbarzadeh A, Meghdari A, Moghadam LJ (2015) Clinical application of a humanoid robot in pediatric cancer interventions. Int J Soc Robot 8(5):743–759. https://doi.org/10.1007/s12369-015-0294-y
Edwards A, Omilion-Hodges L, Edwards C (2017) How do patients in a medical interview perceive a robot versus human physician? In: Proceedings of the companion of the 2017 ACM/IEEE international conference on human–robot interaction. ACM, pp 109–110
Lee N, Kim J, Kim E, Kwon O (2017) The influence of politeness behavior on user compliance with social robots in a healthcare service setting. Int J Soc Robot 9(5):727–743. https://doi.org/10.1007/s12369-017-0420-0
López Recio D, Márquez Segura E, Márquez Segura L, Waern A (2013) The NAO models for the elderly. In: Proceedings of the 8th ACM/IEEE international conference on human–robot interaction. IEEE Press, pp 187–188
Carrillo FM, Butchart J, Knight S, Scheinberg A, Wise L, Sterling L, McCarthy C (2018) Adapting a general-purpose social robot for paediatric rehabilitation through in situ design. ACM Trans Hum Robot Interact 7(1):12. https://doi.org/10.1145/3203304
Looije R, Neerincx MA, Peters JK, Henkemans OAB (2016) Integrating robot support functions into varied activities at returning hospital visits. Int J Soc Robot 8(4):483–497
Pulido JC, González JC, Suárez-Mejías C, Bandera A, Bustos P, Fernández F (2017) Evaluating the child–robot interaction of the NAOTherapist platform in pediatric rehabilitation. Int J Soc Robot 9(3):343–358
van den Heuvel RJ, Lexis MA, de Witte LP (2017) Robot ZORA in rehabilitation and special education for children with severe physical disabilities: a pilot study. Int J Rehabil Res 40(4):353
van den Heuvel RJF, Lexis MAS, de Witte LP (2020) ZORA robot based interventions to achieve therapeutic and educational goals in children with severe physical disabilities. Int J of Soc Robot 12:493–504. https://doi.org/10.1007/s12369-019-00578-z
Niemelä M, Melkas H (2019) Robots as social and physical assistants in elderly care. In: Human-centered digitalization and services. Springer, Singapore, pp 177–197
Majgaard G, Brogaard Bertel L (2014). Initial phases of design-based research into the educational potentials of NAO-robots. In: 2014 9th ACM/IEEE international conference on human–robot interaction (HRI). IEEE, pp 238–239
Arias-Aguilar JA, Palacios-Villavicencio ML, Bretado-Gallegos R, Medina-Nieto MA, Ruiz AB, Rodríguez-López V, Estrada-Bautista J (2017) Analysis of children: humanoid robot interaction to support social skills development. In: Proceedings of the XVIII international conference on human computer interaction. ACM, p 10
Ahmad MI, Mubin O, Orlando J (2016). Children views’ on social robot’s adaptations in education. In: Proceedings of the 28th Australian conference on computer–human interaction. ACM, pp 145–149
Deshmukh A, Janarthanam S, Hastie H, Lim MY, Aylett R, Castellano G (2016) How expressiveness of a robotic tutor is perceived by children in a learning environment. In: 2016 11th ACM/IEEE international conference on human–robot interaction (HRI). IEEE, pp 423–424
Kazemi E, Stedman-Falls LM (2016) Can humanoid robots serve as patient simulators in behavior analytic research and practice? Behav Anal Res Pract 16(3):135–146. https://doi.org/10.1037/bar0000046
Alemi M, Meghdari A, Ghazisaedy M (2015) The impact of social robotics on L2 learners’ anxiety and attitude in English vocabulary acquisition. Int J Soc Robot 7(4):523–535
Chandra S, Dillenbourg P, Paiva A (2019) Children teach handwriting to a social robot with different learning competencies. Int J of Soc Robot. https://doi.org/10.1007/s12369-019-00589-w
Köse H, Uluer P, Akalın N, Yorgancı R, Özkul A, Ince G (2015) The effect of embodiment in sign language tutoring with assistive humanoid robots. Int J Soc Robot 7(4):537–548. https://doi.org/10.1007/s12369-015-0311-1
Köse H, Yorganci R, Algan EH, Syrdal DS (2012) Evaluation of the robot assisted sign language tutoring using video-based studies. Int J Soc Robot 4(3):273–283. https://doi.org/10.1007/s12369-012-0142-2
Ros R, Baroni I, Demiris Y (2014) Adaptive human–robot interaction in sensorimotor task instruction: from human to robot dance tutors. Robot Auton Syst 62(6):707–720. https://doi.org/10.1016/j.robot.2014.03.005
Pino O, Palestra G, Trevino R, De Carolis B (2019) The humanoid robot NAO as trainer in a memory program for elderly people with mild cognitive impairment. Int J Soc Robot. https://doi.org/10.1007/s12369-019-00533-y
Valentí Soler M, Agüera-Ortiz L, Olazarán Rodríguez J, Mendoza Rebolledo C, Pérez Muñoz A, Rodríguez Pérez I et al (2015) Social robots in advanced dementia. Front Aging Neurosci 7:133. https://doi.org/10.3389/fnagi.2015.00133
Johnson DO, Cuijpers RH, Juola JF, Torta E, Simonov M, Frisiello A et al (2014) Socially assistive robots: a comprehensive approach to extending independent living. Int J Social Robot 6(2):195–211
Tsardoulias EG, Kintsakis AM, Panayiotou K, Thallas AG, Reppou SE, Karagiannis GG et al (2017) Towards an integrated robotics architecture for social inclusion—the RAPP paradigm. Cogn Syst Res 43:157–173. https://doi.org/10.1016/j.cogsys.2016.08.004
Sarabia M, Young N, Canavan K, Edginton T, Demiris Y, Vizcaychipi MP (2018) Assistive robotic technology to combat social isolation in acute hospital settings. Int J Soc Robot 10(5):607–620. https://doi.org/10.1007/s12369-017-0421-z
Wilson JR, Lee NY, Saechao A, Tickle-Degnen L, Scheutz M (2018) Supporting human autonomy in a robot-assisted medication sorting task. Int J Soc Robot 10(5):621–641
Tapus A, Peca A, Aly A, Pop C, Jisa L, Pintea S et al (2012) Children with autism social engagement in interaction with Nao, an imitative robot: a series of single case experiments. Interact Stud 13(3):315–347. https://doi.org/10.1075/is.13.3.01tap
Chevalier P, Tapus A, Martin J-C, Isableu B (2015) Social personalized human-machine interaction for people with autism: defining user profiles and first contact with a robot. In: Proceedings of the tenth annual ACM/IEEE international conference on human–robot interaction extended abstracts. ACM, pp 101–102
Chung EYH (2018) Robotic intervention program for enhancement of social engagement among children with autism spectrum disorder. J Dev Phys Disabil 31(4):419–434. https://doi.org/10.1007/s10882-018-9651-8
Beer JM, Boren M, Liles KR (2016) Robot assisted music therapy: a case study with children diagnosed with autism. In: The eleventh ACM/IEEE international conference on human robot interaction. IEEE Press, pp 419–420
David DO, Costescu CA, Matu S, Szentagotai A, Dobrean A (2018) Developing joint attention for children with autism in robot-enhanced therapy. Int J Soc Robot 10(5):595–605
Anzalone SM, Tilmont E, Boucenna S, Xavier J, Jouen A-L, Bodeau N et al (2014) How children with autism spectrum disorder behave and explore the 4-dimensional (spatial 3D+time) environment during a joint attention induction task with a robot. Res Autism Spectrum Disorders 8(7):814–826. https://doi.org/10.1016/j.rasd.2014.03.002
Shukla J, Cristiano J, Oliver J, Puig D (2019) Robot assisted interventions for individuals with intellectual disabilities: impact on users and caregivers. Int J Soc Robot. https://doi.org/10.1007/s12369-019-00527-w
Petric F, Kovacic Z (2020) Design and validation of MOMDP models for child–robot interaction within tasks of robot-assisted ASD diagnostic protocol. Int J of Soc Robotics 12:371–388. https://doi.org/10.1007/s12369-019-00577-0
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: List of the Reviewed Articles
Appendix: List of the Reviewed Articles
-
Aagela, H., Holmes, V., Dhimish, M., & Wilson, D. (2017, March). Impact of video streaming quality on bandwidth in humanoid robot NAO connected to the cloud. In Proceedings of the Second International Conference on Internet of things, Data and Cloud Computing (pp. 1–8).
-
Abdolmaleki, A., Lau, N., Reis, L. P., Peters, J., & Neumann, G. (2016). Contextual policy search for linear and nonlinear generalization of a humanoid walking controller. Journal of Intelligent & Robotic Systems, 83(3–4), 393–408.
-
Ahmad, M. I., Mubin, O., & Orlando, J. (2016a, November). Children views’ on social robot’s adaptations in education. In Proceedings of the 28th Australian Conference on Computer-Human Interaction (pp. 145–149). ACM.
-
Ahmad, M. I., Mubin, O., & Orlando, J. (2016b, November). Effect of Different Adaptations by a Robot on Children’s Long-term Engagement: An Exploratory Study. In Proceedings of the 13th International Conference on Advances in Computer Entertainment Technology (pp. 1–6).
-
Ahmad, M. I., Mubin, O., & Orlando, J. (2017). Adaptive Social Robot for Sustaining Social Engagement during Long-Term Children–Robot Interaction. International Journal of Human–Computer Interaction, 33(12), 943–962. doi: 10.1080/10447318.2017.1300750
-
Ahmad, M. I., Mubin, O., & Patel, H. (2018, December). Exploring the Potential of NAO Robot as an Interviewer. In Proceedings of the 6th International Conference on Human–Agent Interaction (pp. 324–326). ACM.
-
Ahmad, M. I., Mubin, O., Shahid, S., & Orlando, J. (2019). Robot’s adaptive emotional feedback sustains children’s social engagement and promotes their vocabulary learning: a long-term child–robot interaction study. Adaptive Behavior, 27(4), 243–266. doi: 10.1177/1059712319844182
-
Alameda-Pineda, X., & Horaud, R. (2015). Vision-guided robot hearing. The International Journal of Robotics Research, 34(4–5), 437–456.
-
Albo-Canals, J., Martelo, A. B., Relkin, E., Hannon, D., Heerink, M., Heinemann, M., … & Bers, M. U. (2018). A pilot study of the KIBO robot in children with severe ASD. International Journal of Social Robotics, 10(3), 371–383.
-
Alemi, M., Ghanbarzadeh, A., Meghdari, A., & Moghadam, L. J. (2015). Clinical Application of a Humanoid Robot in Pediatric Cancer Interventions. International Journal of Social Robotics, 8(5), 743–759. doi: 10.1007/s12369-015-0294-y
-
Alemi, M., Meghdari, A., & Ghazisaedy, M. (2015). The impact of social robotics on L2 learners’ anxiety and attitude in English vocabulary acquisition. International Journal of Social Robotics, 7(4), 523–535.
-
Alibeigi, M., Rabiee, S., & Ahmadabadi, M. N. (2017). Inverse kinematics based human mimicking system using skeletal tracking technology. Journal of Intelligent & Robotic Systems, 85(1), 27–45.
-
Aly, A., & Tapus, A. (2012, March). Prosody-driven robot arm gestures generation in human–robot interaction. In Proceedings of the seventh annual ACM/IEEE international conference on human–robot Interaction (pp. 257–258).
-
Aly, A., & Tapus, A. (2013, March). A model for synthesizing a combined verbal and nonverbal behavior based on personality traits in human–robot interaction. In 2013 8th ACM/IEEE International Conference on human–robot Interaction (HRI) (pp. 325–332). IEEE.
-
Aly, A., & Tapus, A. (2015). Towards an intelligent system for generating an adapted verbal and nonverbal combined behavior in human–robot interaction. Autonomous Robots, 40(2), 193–209. doi: 10.1007/s10514-015-9444-1
-
Ames, A. D., Cousineau, E. A., & Powell, M. J. (2012, April). Dynamically stable bipedal robotic walking with NAO via human-inspired hybrid zero dynamics. In Proceedings of the 15th ACM international conference on Hybrid Systems: Computation and Control (pp. 135–144).
-
Andreasson, R., Alenljung, B., Billing, E., & Lowe, R. (2017). Affective Touch in Human–Robot Interaction: Conveying Emotion to the Nao Robot. International Journal of Social Robotics, 10(4), 473–491. doi: 10.1007/s12369-017-0446-3
-
Antonietti, A., Martina, D., Casellato, C., D’Angelo, E., & Pedrocchi, A. (2019). Control of a humanoid nao robot by an adaptive bioinspired cerebellar module in 3d motion tasks. Computational intelligence and neuroscience, 2019.
-
Anzalone, S. M., Boucenna, S., Ivaldi, S., & Chetouani, M. (2015). Evaluating the engagement with social robots. International Journal of Social Robotics, 7(4), 465-478.
-
Anzalone, S. M., Tilmont, E., Boucenna, S., Xavier, J., Jouen, A.-L., Bodeau, N., … Cohen, D. (2014). How children with autism spectrum disorder behave and explore the 4-dimensional (spatial 3D+time) environment during a joint attention induction task with a robot. Research in Autism Spectrum Disorders, 8(7), 814–826. doi: 10.1016/j.rasd.2014.03.002
-
Arce, F., Zamora, E., Sossa, H., & Barrón, R. (2018). Differential evolution training algorithm for dendrite morphological neural networks. Applied Soft Computing, 68, 303–313.
-
Arias-Aguilar, J. A., Palacios-Villavicencio, M. L., Bretado-Gallegos, R., Medina-Nieto, M. A., Ruiz, A. B., Rodríguez-López, V., & Estrada-Bautista, J. (2017, September). Analysis of children: humanoid robot interaction to support social skills development. In Proceedings of the XVIII International Conference on Human Computer Interaction (p. 10). ACM.
-
Atzeni, M., & Recupero, D. R. (2018, June). Deep learning and sentiment analysis for human–robot interaction. In European Semantic Web Conference (pp. 14–18). Springer, Cham.
-
Augello, A., Infantino, I., Manfrè, A., Pilato, G., Vella, F., & Chella, A. (2016). Creation and cognition for humanoid live dancing. Robotics and Autonomous Systems, 86, 128–137.
-
Bacula, A., & LaViers, A. (2018, June). Character recognition on a humanoid robotic platform via a Laban movement analysis. In Proceedings of the 5th International Conference on Movement and Computing (pp. 1–8).
-
Baddoura, R., & Venture, G. (2013). Social vs. Useful HRI: Experiencing the Familiar, Perceiving the Robot as a Sociable Partner and Responding to Its Actions. International Journal of Social Robotics, 5(4), 529–547. doi: 10.1007/s12369-013-0207-x
-
Bao, Y., & Cuijpers, R. H. (2017). On the imitation of goal directed movements of a humanoid robot. International Journal of Social Robotics, 9(5), 691–703.
-
Baraka, K., & Veloso, M. M. (2018). Mobile service robot state revealing through expressive lights: Formalism, design, and evaluation. International Journal of Social Robotics, 10(1), 65–92.
-
Baranwal, N., Singh, A. K., & Nandi, G. C. (2017). Development of a Framework for Human–Robot interactions with Indian Sign Language Using Possibility Theory. International Journal of Social Robotics, 9(4), 563–574.
-
Bechade, L., Dubuisson Duplessis, G., Sehili, M., & Devillers, L. (2015, November). Behavioral and Emotional Spoken Cues Related to Mental States in Human–Robot Social Interaction. In Proceedings of the 2015 ACM on International Conference on Multimodal Interaction (pp. 347–350). ACM.
-
Beck, A., Cañamero, L., Hiolle, A., Damiano, L., Cosi, P., Tesser, F., & Sommavilla, G. (2013). Interpretation of emotional body language displayed by a humanoid robot: A case study with children. International Journal of Social Robotics, 5(3), 325–334.
-
Beck, A., Stevens, B., Bard, K. A., & Cañamero, L. (2012). Emotional body language displayed by artificial agents. ACM Transactions on Interactive Intelligent Systems (TiiS), 2(1), 1–29.
-
Bertacchini, F., Bilotta, E., & Pantano, P. (2017). Shopping with a robotic companion. Computers in Human Behavior, 77, 382–395.
-
Beer, J. M., Boren, M., & Liles, K. R. (2016, March). Robot Assisted Music Therapy: A Case Study with Children Diagnosed with Autism. In The Eleventh ACM/IEEE International Conference on Human Robot Interaction (pp. 419–420). IEEE Press.
-
Behrens, S. I., Egsvang, A. K. K., Hansen, M., & Møllegård-Schroll, A. M. (2018, March). Gendered Robot Voices and Their Influence on Trust. In Companion of the 2018 ACM/IEEE International Conference on Human–Robot Interaction (pp. 63–64). ACM.
-
Belpaeme, T., Vogt, P., Van den Berghe, R., Bergmann, K., Göksun, T., De Haas, M., … & Papadopoulos, F. (2018). Guidelines for designing social robots as second language tutors. International Journal of Social Robotics, 10(3), 325–341.
-
Björling, E. A., Rose, E., Davidson, A., Ren, R., & Wong, D. (2019). Can we keep him forever? Teens’ engagement and desire for emotional connection with a social robot. International Journal of Social Robotics, 1–13.
-
B. KA, A. A., Mullapudi, A. K., Ebert, D., Phadnis, N., & Middha, R. (2016, June). HTKS Game for executive functions disorder using NAO Robot. In Proceedings of the 9th ACM International Conference on PErvasive Technologies Related to Assistive Environments (pp. 1–2).
-
Brandstetter, J., Liebman, N., & London, K. (2015, March). Fidgebot: Working Out while Working. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human–Robot Interaction Extended Abstracts (pp. 149–150). ACM.
-
Bremner, P., & Leonards, U. (2016). Iconic gestures for robot avatars, recognition and integration with speech. Frontiers in psychology, 7, 183.
-
Broadbent, E., Feerst, D. A., Lee, S. H., Robinson, H., Albo-Canals, J., Ahn, H. S., & MacDonald, B. A. (2018). How could companion robots be useful in rural schools?. International Journal of Social Robotics, 10(3), 295–307.
-
Cañamero, L., & Lewis, M. (2016). Making new “New AI” friends: designing a social robot for diabetic children from an embodied AI perspective. International Journal of Social Robotics, 8(4), 523–537.
-
Cao, H. L., Esteban, P. G., Simut, R., Van de Perre, G., Lefeber, D., & Vanderborght, B. (2017). A collaborative homeostatic-based behavior controller for social robots in human–robot interaction experiments. International Journal of Social Robotics, 9(5), 675–690.
-
Cao, H. L., Esteban, P. G., Simut, R., Van de Perre, G., Lefeber, D., & Vanderborght, B. (2017). A collaborative homeostatic-based behavior controller for social robots in human–robot interaction experiments. International Journal of Social Robotics, 9(5), 675–690.
-
Cao, H. L., Jensen, L. C., Nghiem, X. N., Vu, H., De Beir, A., Esteban, P. G., … & Vanderborght, B. (2019). DualKeepon: a human–robot interaction testbed to study linguistic features of speech. Intelligent Service Robotics, 12(1), 45–54.
-
Chandra, S., Dillenbourg, P., & Paiva, A. (2019). Children Teach Handwriting to a Social Robot with Different Learning Competencies. International Journal of Social Robotics, 1–28.
-
Chevalier, P., Tapus, A., Martin, J.-C., & Isableu, B. (2015, March). Social Personalized Human–Machine Interaction for People with Autism: Defining User Profiles and First Contact with a Robot. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human–Robot Interaction Extended Abstracts (pp. 101–102). ACM.
-
Chung, E. Y. H. (2018). Robotic Intervention Program for Enhancement of Social Engagement among Children with Autism Spectrum Disorder. Journal of Developmental and Physical Disabilities, 31(4), 419–434. doi: 10.1007/s10882-018-9651-8
-
Cohen, I., Looije, R., & Neerincx, M. A. (2014). Child’s Perception of Robot’s Emotions: Effects of Platform, Context and Experience. International Journal of Social Robotics, 6(4), 507–518. doi: 10.1007/s12369-014-0230-6
-
Collander, C., Tompkins, J., Lioulemes, A., Theofanidis, M., Sharifara, A., & Makedon, F. (2017, June). An Interactive Robot-based Vocational Assessment Game using Lego Assembly. In Proceedings of the 10th International Conference on PErvasive Technologies Related to Assistive Environments (pp. 346–353).
-
Conti, D., Commodari, E., & Buono, S. (2017). Personality factors and acceptability of socially assistive robotics in teachers with and without specialized training for children with disability. Life Span and Disability, 20(2), 251–272.
-
Conti, D., Di Nuovo, S., Buono, S., & Di Nuovo, A. (2017). Robots in education and care of children with developmental disabilities: a study on acceptance by experienced and future professionals. International Journal of Social Robotics, 9(1), 51–62.
-
Cuayáhuitl, H., & Kruijff-Korbayová, I. (2012, June). An interactive humanoid robot exhibiting flexible sub-dialogues. In Proceedings of the 2012 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies: Demonstration Session (pp. 17–20). Association for Computational Linguistics.
-
Dang, T.-H.-H., & Tapus, A. (2014). Stress Game: The Role of Motivational Robotic Assistance in Reducing User’s Task Stress. International Journal of Social Robotics, 7(2), 227–240. doi: 10.1007/s12369-014-0256-9
-
da Silva, J. G. G., Kavanagh, D. J., Belpaeme, T., Taylor, L., Beeson, K., & Andrade, J. (2018). Experiences of a Motivational Interview Delivered by a Robot: qualitative Study. Journal of medical Internet research, 20(5), e116.
-
David, D. O., Costescu, C. A., Matu, S., Szentagotai, A., & Dobrean, A. (2018). Developing joint attention for children with autism in robot-enhanced therapy. International Journal of Social Robotics, 10(5), 595–605.
-
De Beir, A., Cao, H. L., Esteban, P. G., Van de Perre, G., Lefeber, D., & Vanderborght, B. (2016). Enhancing emotional facial expressiveness on NAO. International Journal of Social Robotics, 8(4), 513–521.
-
De Carolis, B., Ferilli, S., & Palestra, G. (2016). Simulating empathic behavior in a social assistive robot. Multimedia Tools and Applications, 76(4), 5073–5094. doi: 10.1007/s11042-016-3797-0
-
De Carolis, B., Ferilli, S., Palestra, G., & Carofiglio, V. (2015, September). Modeling and Simulating Empathic Behavior in Social Assistive Robots. In Proceedings of the 11th Biannual Conference on Italian SIGCHI Chapter (pp. 110–117). ACM.
-
Delaborde, A., Tahon, M., Barras, C., & Devillers, L. (2009, November). A Wizard-of-Oz game for collecting emotional audio data in a children–robot interaction. In Proceedings of the International Workshop on Affective-Aware Virtual Agents and Social Robots (pp. 1–3).
-
Deshmukh, A., Janarthanam, S., Hastie, H., Lim, M. Y., Aylett, R., & Castellano, G. (2016, March). How expressiveness of a robotic tutor is perceived by children in a learning environment. In 2016 11th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 423–424). IEEE.
-
Deshmukh, A., Jones, A., Janarthanam, S., Hastie, H., Ribeiro, T., Aylett, R., … & Papadopoulos, F. (2015, May). An empathic robotic tutor in a map application. In Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems (pp. 1923–1924).
-
Edwards, A., Omilion-Hodges, L., & Edwards, C. (2017, March). How do Patients in a Medical Interview Perceive a Robot versus Human Physician?. In Proceedings of the companion of the 2017 ACM/IEEE International Conference on Human–Robot Interaction (pp. 109–110). ACM.
-
Elbasiony, R., & Gomaa, W. (2018). Humanoids skill learning based on real-time human motion imitation using Kinect. Intelligent Service Robotics, 11(2), 149–169.
-
Erden, M. S. (2013). Emotional postures for the humanoid–robot nao. International Journal of Social Robotics, 5(4), 441–456.
-
Fernández-Llamas, C., Conde, M. Á., Rodríguez-Sedano, F. J., Rodríguez-Lera, F. J., & Matellán-Olivera, V. (2017). Analysing the computational competences acquired by K-12 students when lectured by robotic and human teachers. International Journal of Social Robotics, 1–11.
-
Flemisch, T., Viergutz, A., & Dachselt, R. (2014, March). Easy authoring of variable gestural expressions for a humanoid robot. In Proceedings of the 2014 ACM/IEEE international conference on Human–robot interaction (pp. 328–328).
-
Garcia Becerro, F., Sousa, S., Slavkovik, M., & van der Torre, L. (2012). Selecting judgment aggregation rules for NAO robots: an experimental approach. Selecting judgment aggregation rules for NAO robots: an experimental approach, 1403–1404.
-
Garrell, A., Villamizar, M., Moreno-Noguer, F., & Sanfeliu, A. (2017). Teaching robot’s proactive behavior using human assistance. International Journal of Social Robotics, 9(2), 231–249.
-
Graf, B., Hans, M., & Schraft, R. D. (2004). Care-O-bot II—Development of a Next Generation Robotic Home Assistant. Autonomous Robots, 16(2), 193–205.
-
Grollman, D. H. (2018). Avoiding the Content Treadmill for Robot Personalities. International Journal of Social Robotics, 10(2), 225–234.
-
Hadfield, S. (2015). US Air Force Academy. ACM SIGCSE Bulletin, 47(1), 3–3.
-
Hadfield, S. M., Coulston, C. S., Hadfield, M. G., & Warner, L. B. (2016, February). Adventures in K-5 STEM Outreach Using the NAO Robot. In Proceedings of the 47th ACM Technical Symposium on Computing Science Education (pp. 697–697).
-
Hall, L., Hume, C., Tazzyman, S., Deshmukh, A., Janarthanam, S., Hastie, H., … & Corrigan, L. J. (2016, March). Map reading with an empathic robot tutor. In 2016 11th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 567–567). IEEE.
-
Hu, Y., Sirlantzis, K., Howells, G., Ragot, N., & Rodríguez, P. (2016). An online background subtraction algorithm deployed on a NAO humanoid robot based monitoring system. Robotics and Autonomous Systems, 85, 37–47.
-
Huang, W., Xiao, X., & Xu, M. (2019). Design and implementation of domain-specific cognitive system based on question similarity algorithm. Cognitive Systems Research, 57, 20–24.
-
Ismail, L. I., Verhoeven, T., Dambre, J., & Wyffels, F. (2019). Leveraging robotics research for children with autism: a review. International Journal of Social Robotics, 11(3), 389–410.
-
Jochum, E., Vlachos, E., Christoffersen, A., Nielsen, S. G., Hameed, I. A., & Tan, Z. H. (2016). Using theatre to study interaction with care robots. International Journal of Social Robotics, 8(4), 457–470.
-
Johnson, D. O., & Cuijpers, R. H. (2019). Investigating the effect of a humanoid robot’s head position on imitating human emotions. International Journal of Social Robotics, 11(1), 65–74.
-
Johnson, D. O., Cuijpers, R. H., Juola, J. F., Torta, E., Simonov, M., Frisiello, A., … & Meins, N. (2014). Socially assistive robots: a comprehensive approach to extending independent living. International journal of social robotics, 6(2), 195–211.
-
Johnson, D. O., Cuijpers, R. H., Pollmann, K., & van de Ven, A. A. J. (2016). Exploring the Entertainment Value of Playing Games with a Humanoid Robot. International Journal of Social Robotics, 8(2), 247–269. doi: 10.1007/s12369-015-0331-x
-
Johnson, D. O., Cuijpers, R. H., & van der Pol, D. (2013). Imitating human emotions with artificial facial expressions. International Journal of Social Robotics, 5(4), 503–513.
-
Joubert, O. R. (2015). L’enfant autiste, le robot, et l’enseignant: une rencontre sociétale. Enfance, (1), 127–140.
-
Juang, L. H., & Zhang, J. S. (2018). Robust visual line-following navigation system for humanoid robots. Artificial Intelligence Review, 1–18.
-
Karayaneva, Y., & Hintea, D. (2018, February). Object recognition algorithms implemented on NAO robot for children’s visual learning enhancement. In Proceedings of the 2018 2nd International Conference on Mechatronics Systems and Control Engineering (pp. 86–92).
-
Kazemi, E., & Stedman-Falls, L. M. (2016). Can humanoid robots serve as patient simulators in behavior analytic research and practice?. Behavior Analysis: Research and Practice, 16(3), 135–146. doi: 10.1037/bar0000046
-
Kennedy, J., Baxter, P., & Belpaeme, T. (2015). Comparing robot embodiments in a guided discovery learning interaction with children. International Journal of Social Robotics, 7(2), 293–308.
-
Kennedy, J., Baxter, P., & Belpaeme, T. (2017). Nonverbal immediacy as a characterisation of social behaviour for human–robot interaction. International Journal of Social Robotics, 9(1), 109–128.
-
Kofinas, N., Orfanoudakis, E., & Lagoudakis, M. G. (2015). Complete analytical forward and inverse kinematics for the NAO humanoid robot. Journal of Intelligent & Robotic Systems, 77(2), 251–264.
-
Köse, H., Uluer, P., Akalın, N., Yorgancı, R., Özkul, A., & Ince, G. (2015). The Effect of Embodiment in Sign Language Tutoring with Assistive Humanoid Robots. International Journal of Social Robotics, 7(4), 537–548. doi: 10.1007/s12369-015-0311-1
-
Köse, H., Yorganci, R., Algan, E. H., & Syrdal, D. S. (2012). Evaluation of the Robot Assisted Sign Language Tutoring Using Video-Based Studies. International Journal of Social Robotics, 4(3), 273–283. doi: 10.1007/s12369-012-0142-2
-
Kuchenbrandt, D., Eyssel, F., Bobinger, S., & Neufeld, M. (2013). When a Robot’s Group Membership Matters. International Journal of Social Robotics, 5(3), 409–417. doi: 10.1007/s12369-013-0197-8
-
Kumar, P. B., Rawat, H., & Parhi, D. R. (2019). Path planning of humanoids based on artificial potential field method in unknown environments. Expert Systems, 36(2), e12360.
-
Lathuilière, S., Massé, B., Mesejo, P., & Horaud, R. (2019). Neural network based reinforcement learning for audio–visual gaze control in human–robot interaction. Pattern Recognition Letters, 118, 61–71.
-
Lim, A., & Okuno, H. G. (2015). A recipe for empathy. International Journal of Social Robotics, 7(1), 35–49.
-
Lee, N., Kim, J., Kim, E., & Kwon, O. (2017). The Influence of Politeness Behavior on User Compliance with Social Robots in a Healthcare Service Setting. International Journal of Social Robotics, 9(5), 727–743. doi: 10.1007/s12369-017-0420-0
-
Liu, J., & Urbann, O. (2016). Bipedal walking with dynamic balance that involves three-dimensional upper body motion. Robotics and Autonomous Systems, 77, 39–54.
-
Looije, R., Neerincx, M. A., Peters, J. K., & Henkemans, O. A. B. (2016). Integrating robot support functions into varied activities at returning hospital visits. International Journal of Social Robotics, 8(4), 483–497.
-
Lopez, A., Ccasane, B., Paredes, R., & Cuellar, F. (2017, March). Effects of Using Indirect Language by a Robot to Change Human Attitudes. In Proceedings of the companion of the 2017 ACM/IEEE international conference on human–robot interaction (pp. 193–194). ACM.
-
López Recio, D., Márquez Segura, E., Márquez Segura, L., & Waern, A. (2013, March). The NAO models for the elderly. In Proceedings of the 8th ACM/IEEE international conference on Human–robot interaction (pp. 187–188). IEEE Press.
-
Lorenz, T., Weiss, A., & Hirche, S. (2016). Synchrony and reciprocity: Key mechanisms for social companion robots in therapy and care. International Journal of Social Robotics, 8(1), 125–143.
-
Lucas, G. M., Boberg, J., Traum, D., Artstein, R., Gratch, J., Gainer, A., … & Nakano, M. (2017, October). The role of social dialogue and errors in robots. In Proceedings of the 5th International Conference on Human Agent Interaction (pp. 431–433).
-
Lucas, G. M., Boberg, J., Traum, D., Artstein, R., Gratch, J., Gainer, A., … Nakano, M. (2018, February). Getting to Know Each Other: The role of social dialogue in recovery from errors in social robots. In Proceedings of the 2018 ACM/IEEE International Conference on Human–Robot Interaction (pp. 344–351). ACM.
-
Majgaard, G., & Brogaard Bertel, L. (2014, March). Initial phases of design-based research into the educational potentials of NAO-robots. In 2014 9th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 238–239). IEEE.
-
Martí Carrillo, F., Butchart, J., Knight, S., Scheinberg, A., Wise, L., Sterling, L., & McCarthy, C. (2018). Adapting a general-purpose social robot for paediatric rehabilitation through in situ design. ACM Transactions on Human–Robot Interaction (THRI), 7(1), 12. doi: 10.1145/3203304
-
Matthieu, C., & Dominique, D. (2015, November). Artificial companions as personal coach for children: the interactive drums teacher. In Proceedings of the 12th International Conference on Advances in Computer Entertainment Technology (pp. 1–4).
-
Mazzeo, G., & Staffa, M. (2019). TROS: Protecting Humanoids ROS from Privileged Attackers. International Journal of Social Robotics, 1–15.
-
McCarthy, C., Butchart, J., George, M., Kerr, D., Kingsley, H., Scheinberg, A. M., & Sterling, L. (2015, December). Robots in rehab: towards socially assistive robots for paediatric rehabilitation. In Proceedings of the annual meeting of the australian special interest group for computer human interaction (pp. 39–43).
-
McColl, D., & Nejat, G. (2014). Recognizing emotional body language displayed by a human-like social robot. International Journal of Social Robotics, 6(2), 261–280.
-
Meriçli, C., Veloso, M., & Akın, H. L. (2012). Multi-resolution corrective demonstration for efficient task execution and refinement. International Journal of Social Robotics, 4(4), 423–435.
-
Michieletto, S., Tosello, E., Pagello, E., & Menegatti, E. (2016). Teaching humanoid robotics by means of human teleoperation through RGB-D sensors. Robotics and Autonomous Systems, 75, 671–678.
-
Min, H., Luo, R., & Zhu, J. (2016). Goal-directed affordance prediction at the subtask level. Industrial Robot: An International Journal.
-
Mirnig, N., Stollnberger, G., Giuliani, M., & Tscheligi, M. (2017, March). Elements of humor: How humans perceive verbal and non-verbal aspects of humorous robot behavior. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human–Robot Interaction (pp. 211–212).
-
Mohammad, Y., & Nishida, T. (2015). Why should we imitate robots? Effect of back imitation on judgment of imitative skill. International Journal of Social Robotics, 7(4), 497–512.
-
Moshkina, L., Park, S., Arkin, R. C., Lee, J. K., & Jung, H. (2011). TAME: Time-varying affective response for humanoid robots. International Journal of Social Robotics, 3(3), 207–221.
-
Mubin, O., Henderson, J., & Bartneck, C. (2013, December). Talk ROILA to your Robot. In Proceedings of the 15th ACM on International conference on multimodal interaction (pp. 317–318).
-
Mubin, O., Khan, A., & Obaid, M. (2016, November). # naorobot: exploring Nao discourse on Twitter. In Proceedings of the 28th Australian Conference on Computer–Human Interaction (pp. 155–159)
-
Mwangi, E., Barakova, E., Zhang, R., Diaz, M., Catala, A., & Rauterberg, M. (2016, October). See where i am looking at: Perceiving Gaze Cues with a NAO robot. In Proceedings of the fourth international conference on human agent interaction (pp. 329–332).
-
Mwangi, E., Barakova, E. I., Díaz-Boladeras, M., Mallofré, A. C., & Rauterberg, M. (2018). Directing attention through gaze hints improves task solving in human–humanoid interaction. International journal of social robotics, 10(3), 343–355.
-
Nap, H. H., & Cornelisse, L. (2019). Zorgrobotica: geen science fiction meer. TVZ-Verpleegkunde in praktijk en wetenschap, 129(1), 20–23.
-
Nassour, J., Hénaff, P., Benouezdou, F., & Cheng, G. (2014). Multi-layered multi-pattern CPG for adaptive locomotion of humanoid robots. Biological cybernetics, 108(3), 291–303.
-
Nefti-Meziani, S., Manzoor, U., Davis, S., & Pupala, S. K. (2015). 3D perception from binocular vision for a low-cost humanoid robot NAO. Robotics and autonomous systems, 68, 129–139.
-
Niemelä, M., & Melkas, H. (2019). Robots as social and physical assistants in elderly care. In Human–centered digitalization and services (pp. 177–197). Springer, Singapore.
-
Nieuwenhuisen, M., & Behnke, S. (2013). Human-like interaction skills for the mobile communication robot Robotinho. International Journal of Social Robotics, 5(4), 549–561.
-
Novikova, J., & Watts, L. (2015). Towards artificial emotions to assist social coordination in HRI. International Journal of Social Robotics, 7(1), 77–88.
-
Obaid, M., Kistler, F., Häring, M., Bühling, R., & André, E. (2014). A framework for user-defined body gestures to control a humanoid robot. International Journal of Social Robotics, 6(3), 383–396.
-
Ou, Y., Hu, J., Wang, Z., Fu, Y., Wu, X., & Li, X. (2015). A real-time human imitation system using kinect. International Journal of Social Robotics, 7(5), 587-600.
-
Pan, Y., Okada, H., Uchiyama, T., & Suzuki, K. (2015). On the Reaction to Robot’s Speech in a Hotel Public Space. International Journal of Social Robotics, 7(5), 911–920. doi: 10.1007/s12369-015-0320-0
-
Pelikan, H. R. M., & Broth, M. (2016, May). Why That Nao?: How humans adapt to a conventional humanoid robot in taking turns-at-talk. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (pp. 4921–4932). ACM.
-
Peng, H., Hu, H., Chao, F., Zhou, C., & Li, J. (2016). Autonomous robotic choreography creation via semi-interactive evolutionary computation. International Journal of Social Robotics, 8(5), 649–661.
-
Petric, F., & Kovacic, Z. (2019). Design and Validation of MOMDP Models for Child–Robot Interaction Within Tasks of Robot-Assisted ASD Diagnostic Protocol. International Journal of Social Robotics, 1–18.
-
Pino, O., Palestra, G., Trevino, R., & De Carolis, B. (2019). The Humanoid Robot NAO as Trainer in a Memory Program for Elderly People with Mild Cognitive Impairment. International Journal of Social Robotics, 1–13. doi: 10.1007/s12369-019-00533-y
-
Piumsomboon, T., Clifford, R., & Bartneck, C. (2012, March). Demonstrating Maori Haka with kinect and nao robots. In Proceedings of the seventh annual ACM/IEEE international conference on Human–Robot Interaction (pp. 429–430).
-
Pulido, J. C., González, J. C., Suárez-Mejías, C., Bandera, A., Bustos, P., & Fernández, F. (2017). Evaluating the child–robot interaction of the NAOTherapist platform in pediatric rehabilitation. International Journal of Social Robotics, 9(3), 343–358.
-
Read, R., & Belpaeme, T. (2016). People Interpret Robotic Non-linguistic Utterances Categorically. International Journal of Social Robotics, 8(1), 31–50. doi: 10.1007/s12369-015-0304-0
-
Reppou, S. E., Tsardoulias, E. G., Kintsakis, A. M., Symeonidis, A. L., Mitkas, P. A., Psomopoulos, F. E., … & Gkiokas, A. (2016). RAPP: A Robotic-Oriented Ecosystem for Delivering Smart User Empowering Applications for Older People. International Journal of Social Robotics, 1–14. doi: 10.1007/s12369-016-0361-z
-
Ribeiro, T., Alves-Oliveira, P., Di Tullio, E., Petisca, S., Sequeira, P., Deshmukh, A., … & Papadopoulos, F. (2015, March). The Empathic Robotic Tutor: Featuring the NAO Robot. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human–Robot Interaction Extended Abstracts (pp. 285–285).
-
Rioux, A., & Suleiman, W. (2018). Autonomous SLAM based humanoid navigation in a cluttered environment while transporting a heavy load. Robotics and Autonomous Systems, 99, 50–62.
-
Ros, R., Baroni, I., & Demiris, Y. (2014). Adaptive human–robot interaction in sensorimotor task instruction: From human to robot dance tutors. Robotics and Autonomous Systems, 62(6), 707–720. doi: 10.1016/j.robot.2014.03.005
-
Ros, R., Oleari, E., Pozzi, C., Sacchitelli, F., Baranzini, D., Bagherzadhalimi, A., … & Demiris, Y. (2016). A motivational approach to support healthy habits in long-term child–robot interaction. International Journal of Social Robotics, 8(5), 599–617.
-
Rosenthal-von der Pütten, A. M., & Hoefinghoff, J. (2018). The more the merrier? effects of humanlike learning abilities on humans’ perception and evaluation of a robot. International Journal of Social Robotics, 10(4), 455–472.
-
Rosenthal-von der Pütten, A. M., Krämer, N. C., & Herrmann, J. (2018). The effects of humanlike and robot-specific affective nonverbal behavior on perception, emotion, and behavior. International Journal of Social Robotics, 10(5), 569–582.
-
Rudhru, O., Ser, Q. M., & Sandoval, E. (2016, March). Robot Maori Haka: Robots as cultural preservationists. In 2016 11th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 569–569). IEEE.
-
Ruiz-del-Solar, J., Palma-Amestoy, R., Marchant, R., Parra-Tsunekawa, I., & Zegers, P. (2009). Learning to fall: Designing low damage fall sequences for humanoid soccer robots. Robotics and Autonomous Systems, 57(8), 796–807.
-
Saduanov, B., Tokmurzina, D., Alizadeh, T., & Abibullaev, B. (2018, March). Brain–Computer Interface Humanoid Pre-trained for Interaction with People. In Companion of the 2018 ACM/IEEE International Conference on Human–Robot Interaction (pp. 229–230).
-
Sandoval, E. B., Brandstetter, J., Obaid, M., & Bartneck, C. (2016). Reciprocity in human–robot interaction: a quantitative approach through the prisoner’s dilemma and the ultimatum game. International Journal of Social Robotics, 8(2), 303–317.
-
Sandygulova, A., & O’Hare, G. M. P. (2016, March). Investigating the Impact of Gender Segregation within Observational Pretend Play Interaction. In 2016 11th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 399–406. IEEE.
-
Sandygulova, A., & O’Hare, G. M. (2018). Age-and gender-based differences in children’s interactions with a gender-matching robot. International Journal of Social Robotics, 10(5), 687–700.
-
Sarabia, M., Young, N., Canavan, K., Edginton, T., Demiris, Y., & Vizcaychipi, M. P. (2018). Assistive Robotic Technology to Combat Social Isolation in Acute Hospital Settings. International Journal of Social Robotics, 10(5), 607-620. doi: 10.1007/s12369-017-0421-z
-
Saunderson, S., & Nejat, G. (2019). How robots influence humans: A survey of nonverbal communication in social human–robot interaction. International Journal of Social Robotics, 11(4), 575–608.
-
Schillaci, G., Bodiroža, S., & Hafner, V. V. (2013). Evaluating the effect of saliency detection and attention manipulation in human–robot interaction. International Journal of Social Robotics, 5(1), 139–152.
-
Seo, S. H., Griffin, K., Young, J. E., Bunt, A., Prentice, S., & Loureiro-Rodríguez, V. (2018). Investigating people’s rapport building and hindering behaviors when working with a collaborative robot. International Journal of Social Robotics, 10(1), 147–161.
-
Ser, Q. M., Rudhru, O., & Sandoval, E. B. (2016, March). Robot Maori Haka. In 2016 11th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 549–549). IEEE.
-
Shafii, N., Reis, L. P., & Rossetti, R. J. (2011, June). Two humanoid simulators: Comparison and synthesis. In 6th Iberian Conference on Information Systems and Technologies (CISTI 2011) (pp. 1–6). IEEE.
-
Shahbazi, H., Jamshidi, K., Monadjemi, A. H., & Eslami, H. (2014). Biologically inspired layered learning in humanoid robots. Knowledge-Based Systems, 57, 8–27.
-
Shahbazi, H., Parandeh, R., & Jamshidi, K. (2016). Implementation of imitation learning using natural learner central pattern generator neural networks. Neural Networks, 83, 94–108.
-
Sheikhi, S., Babu Jayagopi, D., Khalidov, V., & Odobez, J. M. (2013, December). Context aware addressee estimation for human robot interaction. In Proceedings of the 6th workshop on Eye gaze in intelligent human machine interaction: gaze in multimodal interaction (pp. 1–6)
-
Shinohara, Y., Mitsukuni, K., Yoneda, T., Ichikawa, J., Nishizaki, Y., & Oka, N. (2018, December). A Humanoid Robot Can Use Mimicry to Increase Likability and Motivation for Helping. In Proceedings of the 6th International Conference on Human–Agent Interaction (pp. 122–128). ACM.
-
Shukla, J., Cristiano, J., Oliver, J., & Puig, D. (2019). Robot Assisted Interventions for Individuals with Intellectual Disabilities: Impact on Users and Caregivers. International Journal of Social Robotics, 1–19. doi: 10.1007/s12369-019-00527-w
-
Singh, A. K., & Nandi, G. C. (2016). NAO humanoid robot: Analysis of calibration techniques for robot sketch drawing. Robotics and Autonomous Systems, 79, 108–121.
-
Spataro, R., Chella, A., Allison, B., Giardina, M., Sorbello, R., Tramonte, S., … & La Bella, V. (2017). Reaching and grasping a glass of water by locked-in ALS patients through a BCI-controlled humanoid robot. Frontiers in human neuroscience, 11, 68.
-
Stanton, C. J., & Stevens, C. J. (2017). Don’t stare at me: the impact of a humanoid robot’s gaze upon trust during a cooperative human–robot visual task. International Journal of Social Robotics, 9(5), 745–753.
-
Striepe, H., Donnermann, M., Lein, M., & Lugrin, B. (2019). Modeling and Evaluating Emotion, Contextual Head Movement and Voices for a Social Robot Storyteller. International Journal of Social Robotics, 1–17.
-
Sun, Z., & Roos, N. (2018). Dynamically stable walk control of biped humanoid on uneven and inclined terrain. Neurocomputing, 280, 111–122.
-
Suay, H. B., & Chernova, S. (2011, March). Humanoid robot control using depth camera. In Proceedings of the 6th international conference on Human–robot interaction (pp. 401–402). ACM.
-
Tahir, Y., Dauwels, J., Thalmann, D., & Magnenat Thalmann, N. (2018). A User Study of a Humanoid Robot as a Social Mediator for Two-Person Conversations. International Journal of Social Robotics, 1–14. doi: 10.1007/s12369-018-0478-3
-
Tahir, Y., Rasheed, U., Dauwels, S., & Dauwels, J. (2014, March). Perception of humanoid social mediator in two-person dialogs. In Proceedings of the 2014 ACM/IEEE international conference on Human–robot interaction (pp. 300–301).
-
Tapus, A., Peca, A., Aly, A., Pop, C., Jisa, L., Pintea, S., … David, D. O. (2012). Children with autism social engagement in interaction with Nao, an imitative robot: A series of single case experiments. Interaction Studies, 13(3), 315–347. doi: 10.1075/is.13.3.01tap
-
Testart, J., Del Solar, J. R., Schulz, R., Guerrero, P., & Palma-Amestoy, R. (2011). A real-time hybrid architecture for biped humanoids with active vision mechanisms. Journal of Intelligent & Robotic Systems, 63(2), 233–255.
-
Tielman, M., Neerincx, M., Meyer, J.-J., & Looije, R. (2014, March). Adaptive emotional expression in robot–child interaction. In Proceedings of the 2014 ACM/IEEE international conference on Human–robot interaction (pp. 407–414). ACM.
-
Tokmurzina, D., Sagitzhan, N., Nurgaliyev, A., & Sandygulova, A. (2018, March). Exploring Child–Robot Proxemics. In Companion of the 2018 ACM/IEEE International Conference on Human–Robot Interaction (pp. 257–258). ACM.
-
Toprak, S., Navarro-Guerrero, N., & Wermter, S. (2018). Evaluating integration strategies for visuo-haptic object recognition. Cognitive computation, 10(3), 408–425.
-
Torta, E., Cuijpers, R. H., & Juola, J. F. (2013). Design of a parametric model of personal space for robotic social navigation. International Journal of Social Robotics, 5(3), 357–365.
-
Torta, E., van Heumen, J., Piunti, F., Romeo, L., & Cuijpers, R. (2015). Evaluation of unimodal and multimodal communication cues for attracting attention in human–robot interaction. International Journal of Social Robotics, 7(1), 89–96.
-
Tsardoulias, E. G., Symeonidis, A. L., & Mitkas, P. A. (2015). An automatic speech detection architecture for social robot oral interaction. In Proceedings of the Audio Mostly 2015 on Interaction With Sound (pp. 1–8).
-
Tuisku, O., Pekkarinen, S., Hennala, L., & Melkas, H. (2019). Robots do not replace a nurse with a beating heart. Information Technology & People.
-
Turp, M., González, J. C., Pulido, J. C., & Fernández, F. (2019). Developing a robot–guided interactive Simon game for physical and cognitive training. International Journal of Humanoid Robotics, 16(01), 1950003.
-
Tutsoy, O., Erol Barkana, D., & Colak, S. (2017). Learning to balance an NAO robot using reinforcement learning with symbolic inverse kinematic. Transactions of the Institute of Measurement and Control, 39(11), 1735–1748.
-
Uluer, P., Akalın, N., & Köse, H. (2015). A new robotic platform for sign language tutoring. International Journal of Social Robotics, 7(5), 571–585.
-
Valentí Soler, M., Agüera-Ortiz, L., Olazarán Rodríguez, J., Mendoza Rebolledo, C., Pérez Muñoz, A., Rodríguez Pérez, I., … & Felipe Ruiz, S. (2015). Social robots in advanced dementia. Frontiers in aging neuroscience, 7, 133. doi: 10.3389/fnagi.2015.00133
-
Valtazanos, A., & Ramamoorthy, S. (2013, March). Evaluating the effects of limited perception on interactive decisions in mixed robotic domains. In 2013 8th ACM/IEEE International Conference on Human–Robot Interaction (HRI) (pp. 9–16). IEEE.
-
Valtazanos, A., & Ramamoorthy, S. (2013, May). Bayesian interaction shaping: Learning to influence strategic interactions in mixed robotic domains. In Proceedings of the 2013 international conference on Autonomous agents and multi-agent systems (pp. 63–70).
-
Vanderelst, D., & Winfield, A. (2018). An architecture for ethical robots inspired by the simulation theory of cognition. Cognitive Systems Research, 48, 56–66.
-
van Dijk, E. T., Torta, E., & Cuijpers, R. H. (2013). Effects of eye contact and iconic gestures on message retention in human–robot interaction. International Journal of Social Robotics, 5(4), 491–501.
-
van den Heuvel, R. J., Lexis, M. A., & de Witte, L. P. (2017). Robot ZORA in rehabilitation and special education for children with severe physical disabilities: a pilot study. International journal of rehabilitation research. Internationale Zeitschrift fur Rehabilitationsforschung. Revue internationale de recherches de readaptation, 40(4), 353.
-
van den Heuvel, R. J., Lexis, M. A., & de Witte, L. P. (2019). ZORA Robot Based Interventions to Achieve Therapeutic and Educational Goals in Children with Severe Physical Disabilities. International Journal of Social Robotics, 1–12.
-
van der Woerdt, S., & Haselager, P. (2019). When robots appear to have a mind: The human perception of machine agency and responsibility. New Ideas in Psychology, 54, 93–100.
-
van Straten, C. L., Peter, J., & Kühne, R. (2019). Child–Robot Relationship Formation: A Narrative Review of Empirical Research. International Journal of Social Robotics, 1–20.
-
Vänni, K. J., & Salin, S. E. (2017, November). A need for service robots among health care professionals in hospitals and housing services. In International Conference on Social Robotics (pp. 178–187). Springer, Cham.
-
Vänni, K. J., & Salin, S. E. (2019). Attitudes of professionals toward the need for assistive and social robots in the healthcare sector. In Social Robots: Technological, Societal and Ethical Aspects of Human–Robot Interaction (pp. 205–236). Springer, Cham.
-
Xu, J., Broekens, J., Hindriks, K., & Neerincx, M. A. (2015). Mood contagion of robot body language in human robot interaction. Autonomous Agents and Multi-Agent Systems, 29(6), 1216–1248. doi: 10.1007/s10458-015-9307-3
-
Wallkötter, S., Joannou, M., Westlake, S., & Belpaeme, T. (2017, October). Continuous Multi-Modal Interaction Causes Human–Robot Alignment. In Proceedings of the 5th International Conference on Human Agent Interaction (pp. 375–379).
-
Wang, B., & Rau, P. L. P. (2019). Influence of Embodiment and Substrate of Social Robots on Users’ Decision-Making and Attitude. International Journal of Social Robotics, 11(3), 411–421.
-
Wen, S., Sheng, M., Ma, C., Li, Z., Lam, H. K., Zhao, Y., & Ma, J. (2018). Camera recognition and laser detection based on EKF-SLAM in the autonomous navigation of humanoid robot. Journal of Intelligent & Robotic Systems, 92(2), 265–277.
-
Wigdor, N., Fraaije, A., Solms, L., de Greeff, J., Janssen, J., & Blanson Henkemans, O. (2014, March). The NAO goes to camp. In Proceedings of the 2014 ACM/IEEE international conference on Human–robot interaction (pp. 110–110).
-
Wilke, C., Götz, S., & Richly, S. (2013, March). JouleUnit: a generic framework for software energy profiling and testing. In Proceedings of the 2013 workshop on Green in/by software engineering (pp. 9–14).
-
Willemse, C. J., & van Erp, J. B. (2019). Social touch in Human–robot interaction: Robot-initiated touches can induce positive responses without extensive prior bonding. International journal of social robotics, 11(2), 285–304.
-
Wilson, J. R., Lee, N. Y., Saechao, A., Tickle-Degnen, L., & Scheutz, M. (2018). Supporting human autonomy in a robot-assisted medication sorting task. International Journal of Social Robotics, 10(5), 621–641.
-
Wykowska, A., Kajopoulos, J., Obando-Leiton, M., Chauhan, S. S., Cabibihan, J. J., & Cheng, G. (2015). Humans are well tuned to detecting agents among non-agents: examining the sensitivity of human perception to behavioral characteristics of intentional systems. International Journal of Social Robotics, 7(5), 767–781.
-
Xu, J. (2014, May). Body language of humanoid robots for mood expression. In Proceedings of the 2014 international conference on Autonomous agents and multi-agent systems (pp. 1711–1712).
-
Zanatto, D., Patacchiola, M., Cangelosi, A., & Goslin, J. (2019). Generalisation of Anthropomorphic Stereotype. International Journal of Social Robotics, 1–10.
-
Zeller, F., Smith, D. H., Duong, J. A., & Mager, A. (2019). Social Media in Human–Robot Interaction. International Journal of Social Robotics, 1–14.
-
Zhu, T., Zhao, Q., Wan, W., & Xia, Z. (2017). Robust regression-based motion perception for online imitation on humanoid robot. International Journal of Social Robotics, 9(5), 705–725.
Rights and permissions
About this article

Cite this article
Robaczewski, A., Bouchard, J., Bouchard, K. et al. Socially Assistive Robots: The Specific Case of the NAO. Int J of Soc Robotics 13, 795–831 (2021). https://doi.org/10.1007/s12369-020-00664-7
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-020-00664-7