
Abstract
There are many researches on the seed-metering device of sugarcane planter at present. However, the researches on the seed compensator device are sparse. Missing-seeding exists in the sugarcane planter, which often lead to economic loss. This paper presented a description of seed compensator device for matching with the seed-metering device. The device could solve the problem that the qualified rate was not high enough and the process of filling and clearing seeds was discontinuous. According to the analysis of the movement of seeds in the replanting process, the form of the replanting structure was determined, and the four structural parameters that affect the performance were determined: the sprocket speed, the height of the right wall of the slot, the baffle angle, and the offset distance of baffle. ADAMS was used to simulate the movement of the replanting device. And the optimal parameter values were obtained, which were 20 rpm, 24 mm, 85° and 15 mm, respectively. According to the optimal structure parameters, the experiment was carried out on the self-made experiment platform of seed compensator device. The results displayed the seed compensator device had favorable performance for seeds filling and clearing, which could realize continuous replanting for the seed-metering device and reduce missed-seeding in the process of sugarcane planting. The mean values of each index were: the empty slot rate was 1.10%, the blocking rate was 3.79%, the replanting rate was 1.29%, and the qualification rate was 96.21%. Three single-factor experiments were carried out according to the working conditions. The experiment has shown that the device was not affected by speed fluctuations. And it could meet the replanting requirements when the seeding speed was less than 17.2r/min and the number of continuous missing-seeding was less than 2.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
China is the third largest sugarcane plantation country in the world. Guangxi in the south of China occupies 60% of the total planting area and is one of the main sugarcane planting areas (Ruggeri et al. 2019; Shi et al. 2019; Huang et al. 2015). Transversal sugarcane planter with seed pre-cutting can continuously complete furrow, seeding, fertilization, soil covering, film covering and other links, which has the advantages of high automation, less seed and high yield (Naik et al. 2013; Lu et al. 2020). Although the existing sugarcane planters in China can meet the basic functions of sugarcane planting, missing-seeding and uneven planting are common, most of the links require manual operation, which is prone to miss. With broadcasting phenomenon, the missing rate reached 6% (Han et al. 2019; Zhang et al. 2020a, b). Missing-seeding will directly affect the quality of seeding, so artificial reseeding needs to reduce the missing-seeding rate. Thanks to sugarcane planting will be covered with soil, it is difficult to find the missing location of seeds and reseed timely. Artificial reseeding requires re-furrowing, seeding, fertilization, which intensifies manual labor and affects economic benefits.
The reseeding system is designed to reduce missed seeding and improve seeding quality. Scholars and institutions at home and abroad had conducted related research on the missed broadcast technology. Singh et al. (2011) designed an electronically controlled seed metering device to achieve precise sowing of okra seeds through real-time monitoring of the seeding process. Al-Yamani and Krishna have developed a missing seeding detection and compensator system, which can effectively improve the real-time performance and reseeding speed of the seeding state (Al-Yamani et al. 2005; Krishna et al. 2004). In order to solve the problem of loss sowing for the spoon-chain metering, Niu et al. (2016) designed a capacitive missing seed detection sensor. The capacitance sensor had reliable detection and good replanting effect. The replanting quantification rate has reached 84.6%. Zhu et al. (2014) designed and produced an automatic reseeding device that was composed of both a reseeding device and a seed-metering device. Through the transcending rotation of the seed-metering device, the position-free reseeding was realized, and the reseeding quantification rate reached 92.98%, which improved the seeding quality. Xia et al. (2007) used ADAMS to build a virtual prototype model and perform optimization analysis. The seed compensator based on the optimal simulation parameters can achieve 83.2% replenishment rate in the experiment, which improved the sowing rate of the precision sowing soybean machine. Through dynamic and kinematics simulation analysis of the replanting process, He et al. (2020) determined the main factors affecting the replanting effect and designed the replanting device. The device used a photoelectric sensor to detect missed sowing, so as to replant the sugarcane planter. The replanting rate of the device reached 93.97%, which effectively improved the planting efficiency of seeds.
There are few researches on seed compensator devices for long striped seeds in China at present, especially sugarcane. So it is of great significance to design a seed compensator device that is compatible with planters and has stable performance (Cao et al. 2016). The compensator device is an auxiliary device for the seed-metering device, and its function is to refill the seed to the empty chain of the seed-metering device to reduce the missing-seeding rate and improve the sowing quality. The seed-metering device has two types of missing seeds: intermittent and continuous missing seeds. Therefore, the seed compensator device needs to be able to operate continuously and smoothly to achieve real-time accurate seeding.
Aiming at the problems of high missing-seeding and poor continuity of replanting rate of transversal sugarcane planter with seed pre-cutting, this paper presented a seed compensator device matching with seed-metering for the transversal planter. The seed compensator device was designed, based on the analysis of the movement of seeds during the replanting process. The designed seed compensator device was simulated and analyzed in ADAMS to verify the continuity of seed filling and seed cleaning. And the self-made experiment platform was used to verify the continuity performance of the device under the optimal parameters.
Material and Methods
Transversal Double-Bud Sugarcane Planter
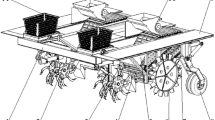
The transversal double-bud sugarcane planter (Fig. 1) adopts the method of deep seeding and shallow covering, which is conducive to the emergence of seeds and lodging resistance. It is composed of furrow openers, seed-metering, fertilizers, seed compensators and soil cover unit (Zhong et al. 2021).

Schematic view of the transversal planter. 1 Cane box, 2 seed compensator device, 3 cane box activity platform, 4 seed-metering device, 5 depth adjustment auxiliary wheel, 6 soil-covering device, 7 earth wheel, 8 fertilizer, 9 sugarcane box, 10 furrow opener, 11 frame
Seed Compensator Device
The seed compensator device (Fig. 2) is arranged on the first grade elevator chain of the seed-metering, and mainly composes of storage box, lifting mechanism, baffle, and roller rake.

Schematic drawing of seed compensator device. 1 Sprocket wheel, 2 storage box, 3 margin detection sensor, 4 seeds, 5 lifting mechanism, 6 chain groove, 7 baffle,8 storage space, 9 storage detection sensor, 10 deflector, 11 roller rake
Storage Box
The storage box is a container for storing pre-cutting seeds, which is equipped with lifting mechanism to separate the seeds from the roller rake. The back face of storage box is set in an arc shape to avoid interference between the seeds and the lifting mechanism. The box should have a certain capacity to avoid frequent artificial filling. The activity platform can hold about 1000 seeds each time, so the box should be able to hold 50 seeds according to the missing rate of 5%.
Lifting Mechanism
The lifting mechanism consists of sprocket, chain and chain grooves. When the seeds were filled into the chain grooves along the back face of the box, the chain would drive the chain grooves to lift the seeds into the storage space. But the seeds in the lifting mechanism do not need to be seed directly, so there is no need to strictly limit seeds in each groove.
Storage Space
The storage space is formed between the two baffles. Each layer of the storage space can accommodate only one seed, but it can accommodate up to 5 ~ 6 seeds. The seeds are arranged in layers in the storage space and then filled to the roller rake.
Roller Rake
As the actuator of the seed compensator device, the working state of roller rake determines the qualification rate. The slot in the roller rake is used to store seeds. Because the roller rake is the last link, each groove just holds seed. The radian of the roller rake blades and the different wall height around the slot can cooperate with the baffle to transfer the excess seeds back to the storage space.
Working Principle
The seed compensator device is matched with the seed-metering device, which is used to replenish seeds to the seed-metering device (Fig. 3). When the first elevator chain groove of the seed-metering device is empty, the seed compensator device will drop seeds and fill the empty groove to avoid missing seed. And the seeds are putted into the storage box ahead of time. The seed compensator is divided into three steps of lifting, preparation and replenishing.

Working schematic of seed compensator device

Seed compensator detection system. 1 Missing detection sensor, 2 first elevator chain groove, 3 sprocket for seed-metering device, 4 metering speed detection sensor, 5 seed, 6 roller rake, 7 deflector, 8 initial point detection sensor
Firstly, the seeds are filled into the chain groove under the action of its own gravity and the extrusion force between seeds. Because the chain groove transmission has certain requirements for the posture of seeds, the seeds in the box need to be arranged in order. It will cause a buzzer alarm when the margin sensor detects that there are not enough seeds in the storage box. And then it needs to manually add seeds to the box. The storage detection sensor sends out a signal when the seeds are insufficient in the storage space (less than two seeds). The PLC controller receives the signal and drives the lifting motor to be started. Then, the lifting mechanism acts to lift the seeds from the bottom to the top of the mechanism.
Then, when the seeds reach the top of the lifting mechanism, the seeds slide along the chain groove until it leaves the groove and then makes a similar horizontal throwing movement into the storage space. Each layer of the seed storage space can only hold one seed. And it can be accommodated about 5–6 seeds. When there is enough sugar cane in the seed storage space, the sensor will send out a signal and the lifting motor will be turned off under the control of the PLC.
Finally, when the planter starts normal operation, the missing seed detection sensor (Fig. 4) detects the seeds in the chain groove of the seed-metering device. When there is no seed in the chain groove, the sensor sends out a signal of missing seed, and the PLC controller drives the roller rake motor to rotate a certain angle. After that the seed falls into the first elevator chain groove, and the excess seed will be pulled back to the storage space. With the action of the roller rake, the seed in the roller rake will be thrown out along the deflector and enter the chain groove of the seed-metering device. The device completes the replenishing operation.
Movement Analysis
Movement Analysis of Seeds in the Storage box
The back face of the storage box plays the role of storing seeds and auxiliary lifting seeds. Under the condition of no external force, the reasonable radian of the storage box can make the seeds fill into the chain groove by their own gravity. If the radian is too large, the pressure of seeds on the chain will increase and cause the lifting difficult. When the radian is too small, it is difficult to fill the seeds and easy to cause empty groove, which affects the continuity of the replenshing. The movement of seeds on the back face of the storage box is analyzed (Fig. 5).

Seed filling performance analysis
To analyze the force of seeds,
where \(m\) is the weight of seeds (kg), g is the acceleration of gravity (m/s2), \(F_{N}\) is the supporting force of the back face of the reseeding box for the seeds (N), µ is the coefficient of sliding friction between seed and steel plate, and \(\alpha\) is initial angle of back face of reseeding box (°).
The static friction coefficient between seed and steel plate is 0.211 by calculation (Li et al. 2020), which can be substituted in the formula to obtain the critical initial angle 11.91° for static single seed filling. In order to ensure that single seed can be filled successfully and the lifting resistance is not too high, the initial angle is 15°.
The gap between grooves will be small when the two chain grooves are in the same horizontal line. And it not only can completely avoid the seed being stuck and causing damage to the seed, but also prevent the seed from interfering with the lifting mechanism and interrupt the lifting action. Therefore, when a chain groove begins to move away from the back face of the box, the next chain groove must be about to break away from the sprocket covering angle. Then, the final angel of back face of the box is almost parallel to the chain. Storage box size is shown in Fig. 6.

Storage box size
The Effect of the Lifting Mechanism Tilt Angle on the Filling Performance
The research on chain drive has become mature, and the research group has also done a lot of research on the chain-roller seed-metering in the early stage (Ma et al. 2020). The research showed that the tilt angle of the lifting mechanism had a significant effect on the filling performance. The smaller the tilt angle is, the better performance seed fills, but the higher reseeding rate is. When it is large, the replanting rate reduces and the structure is compact, but the seeds are easy to drop down during the lifting process so as to result in missing-seeding. Force analysis diagram of lifting process is shown in Fig. 7.

Force analysis diagram of lifting process
In order to make the chain groove to replenish the seeds steadily, the force analysis of the seeds is according to the Darren Bell principle.
where \(\beta\) is the tilt angle of the lifting mechanism (°), \(\theta\) is the bending angle of the chain groove (°), \(D\) is the sprocket diameter (m), \({\text{v}}_{a}\) is the chain speed (m/s), \(\mu_{2}\) is the static friction coefficient between seed and seed, \(F_{N1}\) is the support force for seeds (N), \(F_{N2}\) is the support force of chain grooves on seeds (N), \(F_{f1}\) is the friction force of chain groove on seed (N) and \(F_{f2}\) is the seed inertial centrifugal force (N).
Substituting the corresponding parameters obtains \(\beta \ge 20.94^\circ\). When the tilt angle of the lifting mechanism is greater than 20.94°, the seeds can be smoothly replenished into the chain groove. Based on the experiment and subsequent simulation verification, when the lifting angle was 65°, the lifting chain groove has no empty grooves and the amount of seeds was mostly two at different speeds, indicating that the sugarcane seeds could fill the chain groove with favorable performance. It verified the rationality of the lifting mechanism design.
Design of the Chain Groove
Effectively lifting seed can reduce the sprocket speed and increase the torque. At the same time, it can ease the burden of the motor and reduce the cost. However, too many seeds may cause insufficient kinetic energy when they are thrown out, and seeds cannot enter the storage space. Therefore, the chain groove is bent at an angle to remove unnecessary seeds, so that one or two canes can be kept in each groove. A force analysis on the chain groove is shown in Fig. 8.

Force analysis on the chain groove
where \(\gamma\) is the angle between seed centerline and vertical line (°), \(a\) is the centroid acceleration(m/s2),\(d\) is the diameter of seed (mm), \(\omega\) is the angular acceleration (rad/s2), \(I\) is the moment of inertia (kg.m2), \(\mu_{1}\) is the rolling friction coefficient between seeds, \(F_{f1}\) is the friction between seeds, and \(F_{N1}\) is the support force for seeds (N).
After substituting relevant parameters, the critical included angle of seed rolling is γ = 17.92°. It is calculated that the bending angle θ of chain groove is 25°, which could meet the loading requirements of chain groove.
Movement Analysis of the Chain Seeding Process
The seeds will slide when the chain groove round the equilibrium position, and then, the seeds are thrown into the storage space in an oblique throwing motion. Analyses of these two processes separately are shown in Fig. 9.

Chain groove seeding diagram
The following formula is obtained according to the kinetic energy theorem:
where \(W_{G}\) is the work of gravity (J), \(W_{r}\) is the work of centrifugal force (J), \(W_{f}\) refers to the work of frictional force (J), \(h_{1}\) is the vertical of the seed before movement(m), \(h_{2}\) is the vertical of seed sliding out of the chain groove(m), \(s_{1}\), \(s_{2}\) are the distance of seed sliding (m), \(v_{1}\), \(v_{2}\) are the end speed of the seed sliding out of the chain groove (m/s), \(\varphi\) is the angular speed of sprocket (rpm), \(r_{0}\) is the distance from sprocket center to chain groove (m), and \(l\) is the bending length of the chain groove (m).
It can be obtained from the above formula:
It could be seen that the change of the throwing speed of the seeds was closely related to the angular velocity of the sprocket and the sliding distance of the seeds on the chain groove. In other words, the throwing speed of the seeds is closely related to the sprocket speed and the seed size.
Design of the Roller Rake
The seed compensator device is driven by a stepping motor, and the acceleration of the roller rake is affected by the size of the roller rake and the torque of the motor. Under the condition of a certain torque of the motor, the smaller the size of the roller rake is, the smaller the moment of inertia and the better the acceleration performance is. The roller rake should be as small as possible to increase the reliability of the device when the device needs to be started frequently. In this study, the seed was selected as the research object, and the specific data are in Table 1.
In order to facilitate the filling seeds (Luo et al.2007), the width L of the groove should be 10% larger than the maximum diameter of seed.
The depth of the groove should be equaled to or less than the average diameter of seed for ensuring that only a seed can be entered into the groove each time,
when \({\text{d}}_{\max } = 38{\text{mm}}\),\(d_{m} = 35{\text{mm}}\), roller rake slot size is shown in Fig. 10.

Roller rake slot size
The diameter of the roller rake is a key factor affecting the performance of the filling. The larger the diameter of the roller rake is, the more slots can be arranged. The smaller the rotation angle of the replenishing is, the shorter the replenish response time is. However, larger diameter means larger structure, mass and moment of inertia. Observation during the test (He et al. 2020) found that the quantification rate of filling increased linearly with the increase in the number of slot, and when the number of slot is 8 or 10, the quantification rate was better. When the number of slot is in a small amount, and the seeds storage is insufficient, which will lead to missed seeds. When the number of slot is too large, there are too many cane storage tanks, which are prone to block.
The working mode of the roller rake is similar to the type wheel seed-metering device, and its diameter should be within 80 ~ 260 mm (Zhang et al. 2020a, b). According to the slot spacing is 0.5L design, the minimum circumference of the roller rake is \(S\).
The diameter of the reseeding roller rake is \(D_{0}\),
Considering the size and the quantification rate of filling, the number of roller slot is fixed as 8, and other parameters are substituted to obtain \(D_{0} > 192.78{\text{mm}}\), and \(D_{0} = 200{\text{mm}}\).
Analysis of Roller Rake on the Cleaning Performance
When the storage space continuously provides seeds for the roller rake, continuous multiple seeds enter the slot of the roller rake, which are prone to replant. In order to achieve accurate filling seed, the seed compensator device needs to ensure that only one seed can be accommodated in the slot. Multiple seeds will squeeze with the baffle, causing replanting to be interrupted. So it is necessary to remove the redundant seeds. However, the removal of seeds is achieved by baffle and the roller rake blades. Therefore, the force analysis of the seeds removal process is carried out. Under normal conditions, the excess seeds can be lifted by the roller rake blades as shown in Fig. 11.
where \(N_{1}\) is the supporting power of seed storage baffle to seeds (N), \(N_{2}\) is the supporting force of roller rake blades on seeds (N), \(f_{1}\) is the friction force of storage baffle on seeds (N), \(f_{2}\) is the friction force of roller rake blades on seeds (N), \(\theta_{0}\) is the angle between the common tangent of the seed and the blade of the roller rank and the horizontal(°), and \(M\) is the moment (N·m).

Performance analysis of clearing

Seed model
It was calculated that \(\theta_{0}\) is 23.86°. When the angle between the common tangent line of the seed and the blade and the horizontal line is greater than 23.86°, the excess seeds can be cleaned, and \(\theta_{0}\) is in contact with the seed and the blade. In other words, the seed cleaning effect is related to the height of the right wall slot, the angle of the baffle, and the offset distance of the baffle.
Motion Simulation
The quantification rate of being thrown into storage space was correlated with the sprocket speed and seed size. The seeds clearing performance of the roller rake is related to the angle \(\theta_{0}\). In other words, it is related to the blade arc of the roller rake, the angle of the seed storage baffle and the offset distance of the baffle. Therefore, the virtual simulation analysis was carried out on the seed compensator device to verify the continuity of the device and prepare for the subsequent experiment.
Simulation Model Establishment
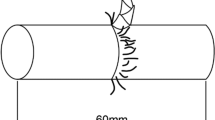
In order to simulate the movement of seeds closer to the real situation, seeds were designed as slightly curved cones like Fig. 12, and length of double-buds seeds is 320 mm. A total of 23 seeds of three sizes are placed in the storage box.

Simulation model of seed compensator device
SolidWorks has the advantage of modeling building. A complex seed compensator device assembly model was established on the SolidWorks software and then imported into ADAMS for kinematic analysis. Seed compensator device simulation model is shown in Fig. 13.
Material Parameter Setting
The model material parameters are shown in Table 2.
In order to produce relative motion of each mechanism, constraints should be added to each component (Table 3). The work of applying contact is huge, so the macro command is used to add contact force.
The seed planter is pulled forward by the Lovol tractor, and the field operation speed of the tractor is 3.07 km/h ~ 7.02 km/h. Recorded in high-definition video, the sowing speed of the seed-metering device is 1 s /root when the tractor moves forward at the speed of 3.07 km/h. The relationship between tractor speed and sprocket speed and sowing speed is shown in Table 4.
Sprocket Speed
Therefore, five sprocket speeds were set for the five gears of Lovol tractor (Table 5). The experiment conditions were as follows: The height of right slot was 24 mm, the baffle angle was 90°, and the offset distance was 10 mm.
The simulation experiment results of different speeds of lifting mechanism are shown in Table 6. The results shown that there is no empty chain groove, and the loading capacity of chain groove is mostly 2 seeds under different speed conditions. The lifting efficiency is high, and the performance of filling seeds into chain groove is good, which verifies the reasonable design of storage box and lifting mechanism. However, when the sprocket speed is 18.33 rpm and 19.17 rpm, the maximum storage is small. In the case of continuous rotation of the roller rake, when the sprocket speed is 18.33 rpm, the leakage of the roller rake appears. When the sprocket speed is 20 rpm, 20.83 rpm and 21.67 rpm, the maximum seed storage space is good and can meet the requirements, but the speed of 20 rpm is lower and the motor pressure is smaller. In conclusion, the sprocket speed of 20 rpm is more suitable. (Table 7).
In order to explore the influence of seed size on seed filling performance, three seed speeds with different sizes were selected for analysis when the sprocket speed was 20 rpm. The size matching of seeds in the chain groove is shown in Fig. 14 and 25–30 mm seed is at the bottom of the chain groove.

Seed sizes match

Speed comparison of different seed sizes
The speed comparison diagram of seed seeds with different sizes is shown in Fig. 15. The dimensions of PART 134, PART_ 138, PART _ 136 are 20–25 mm, 25–30 mm and 30–35 mm, respectively. There are speed differences among different seed sizes, and the speed increases with the increase in seed size. Therefore, seed size has an impact on the speed of seeds into storage space, which is consistent with the previous theoretical research results.

Seed movement track
In order to explore the influence of sprocket speed on seed filling performance, seeds with a diameter of 25–30 mm are selected in the chain groove. The statistical results show that the speed of seeds with the same size fluctuates at different speeds, but there is no obvious regularity. It is proved that the effect of sprocket speed on seed filling speed is not significant. According to the analysis in combination with formulas (22) and (23), the coefficient order of \(\varphi^{{2}}\) is lower than that of \(g\), so the influence of small change of sprocket speed on seeds filling speed is not obvious. At this time, the seed filling kinetic energy is mainly transformed by gravity potential energy, and the speed fluctuation is caused by chain vibration. Track the movement track of seed, as shown in Fig. 16.
The Height of Right Slot
The blade of the roller rake is an important factor affecting the performance of the roller rake. The blade arc of the roller rake can be changed by changing the height of the right wall of the slot of the roller rake. The stress of seed in the process of filling into the roller rake will change with different blade arc. The fluidity of seed filling into the roller rake can be reflected by the change of contact force between seeds and the baffle. Experiment conditions are the following: The sprocket speed is 20 rpm, the baffle angle is 90°, and the offset distance is 10 mm. The experiment level is shown in Fig. 17, among them, 36 mm is the control group.

Simulation model of the height of the right wall
The simulation experiment results of the right wall height of different slots are shown in Fig. 18. The results show that when the right wall height of the slot is 16 mm, 28 mm, and 32 mm, a great contact forces appears. At this time, seeds are squeezed by the roller rake and baffle, resulting in seed sticking, and discontinuous replenishing. Although no seed sticking occurs at 36 mm height, the maximum contact force is close to 5000 N, which would also cause great damage to seeds. When the height of the right wall of the slot is 20 mm and 24 mm, the contact force is low and about 100 N, there is no damage to buds and blocking, and the seed clearing effect is good. Further comparison shows that when the height of the right wall of the slot is 24 mm, the contact forces density of greater than 50 N is 26.07% and the density of contact force less than 20 mm is 34.78%, and the seed clearing effect of the roller rake is the best.

Contact force of seeds at different heights on the right wall of the slot
Baffle Angle
The baffles arrange the seeds to be replenished in an orderly manner. And it interacted with the roller rake to clean excess seeds in the slot of the roller rake at the same time, which ensured that the roller rake has one seed per groove. The baffle angle has an important effect on the replenishing and cleaning performance of the seed compensator device. The experiment conditions are set as follows: The sprocket speed is 20 rpm, the height of the right wall of the slot is 24 mm, the offset distance is 10 mm, and the experiment level is shown in Fig. 19.

Baffle angle model
The experiment results of different baffle angles are shown in Fig. 20. Tremendous force was being exerted on the baffle when the baffle angle was 80° and 100°. That would result in discontinuous reseeding as the seed was squeezed against the baffle and roller rake. The maximum contact force decreased gradually when the baffle angle increases from 85° to 95°. And the maximum force at the angle of 95° was 80.83 N. However, the force was mostly distributed around 25 N and did not exceed 50 N at the angle of 85°, which was small and evenly distributed in this case. Therefore, when the baffle angle was 85°, the seed clearing ability is the best and the damage to cane species was small.

Seeds contact force under different baffle angle
Offset Distance of Baffle
In order to explore the influence of the offset distance on the seed filling performance of the roller rake, the contact force between seeds and the baffle under each offset distance was analyzed. Experiment condition is as follows: The sprocket speed is 20 rpm, the height of the right wall of the slot is 24 mm, and the baffle angle is 90°. The experiment level is shown in Fig. 21.

Offset distance of baffle model
The simulation experiment results of different offset distances are shown in Fig. 22. The results show that the maximum value of contact force is very large when the offset distance is 0 mm and 5 mm, indicating that seeds are sticking under these two offset distances, leading to the interruption of replenishing. However, with the increase in the offset distance, the phenomenon of seeds sticking disappeared, and the maximum contact forces of seeds and baffle were 103.57 N, 89.43 N and 101.16 N, respectively. The maximum contact forces tended to decrease first and then increase when the offset distance was greater than 10 mm, but the changes were small. However, the contact forces did not exceed 100 N when the offset distance was 15 mm. So the best offset distance was 15 mm.

Seeds contact force under different offset distances
Experimental Set Up
The instruments and equipment used in experiment platform (Fig. 23) include: self-made seed compensator device, photoelectric tachometer, digital Vernier caliper, and digital camera. The whole mechanism was powered by the motor, and important parameters of the experiment platform are shown in Table 7.

Self-made experiment platform. 1 Roller rake motor, 2 roller rake, 3 lifting motor, 4 storage box, 5 lifting mechanism, 6 baffle, 7 deflector, 8 first elevator chain grooves
Index
Lifting efficiency and continuity are the import indicators to measure the performance of the seed compensator device. The purpose of the test was to verify whether the optimized reseeding device could continuously lift seed seeds from the reseeding box and whether the filling of seeds in the reseeding roller rake was interrupted. Therefore, the main parameter of the experiment was empty slot rate, seed sticking rate and replanting rate.
The lifting performance is determined by the efficiency of the groove to lift seeds which are specifically expressed as the number of empty grooves (no seeds filling in chain grooves) in the continuous lifting process.
The seed clearing performance of the seed compensator device is reflected by the filling state of seeds in the slot of the roller rake. Specifically, whether the seeds are replanted or stick in the groove is expressed by the replanting rate, blocking rate and qualification rate:
Performance of Equipment
According to theoretical analysis and simulation results, the optimal level of each factor was selected to carry out the verification experiment. The levels were 20 rpm of the sprocket speed, 24 mm of the right wall height, 85°of the baffle angle, and 15 mm for the offset distance. However, tractor speed was slow when walking in the field. The research group had previously verified that the sprocket speed has no significant effect on the quantification rate of replanting, and the previous simulation also verified that the sprocket speed has no significant effect on the speed of seed throwing in the storage space. Finally, this paper selected 10 rpm as the sprocket speed to do experiment according to the actual situation.
Before the test, the lifting mechanism should be checked to prevent that it cannot work normally. At first, start the lifting motor without seeds, measure the speed with Laser Speedometer. Next set the lifting speed at 10 rpm, and adjust the roller rake speed at 10 rpm. Then, 50 seeds of double-buds would be placed in the storage box in an orderly manner. During the experiment, a high-definition digital camera was used to record each seed replenish, and finally, result is shown in Table 8.
The experiment was repeated for 8 times with 50 seeds each time. The qualification rate of seed filling was high overall with an average of 96.21%, which effectively reduces the leakage of seed-metering device and improves the planting efficiency. The maximum rate of seed sticking was 6%, and the average rate was 3.79%. The average rate of empty grooves was 1.10%, which meant that the back face of the storage box and the lifting mechanism had good filling performance, and which ensures that the space will not be interrupted due to the poor supply of seeds by the lifting mechanism. The highest replanting rate was 4.17%, which met the production requirements. And the situation of reseeding and seeds blocking appeared during the experiment are shown in Fig. 24.

Reseeding and seeds blocking
The quantification rate of the best original seed compensator device suitable for sugarcane planters was 93.7%, and its replanting rate is 1.69%. In addition, due to structural problems such as the curvature of the rear end of the storage box and the unreasonable baffle, the seeds were missed. Therefore, it can be seen that the performance of the device has been better improved. The seed compensator device has favorable performance of filling and clearing seeds, which can realize continuous replanting and reduce seed leakage in the process of seed planting.
Single Factor of Experiments
Actually, the speed of the transversal sugarcane planter is often not unstable. There will be a certain range of fluctuations due to the complex field environment. And the number of empty slot in the first grade elevator chain is also random. Physical platform experiments are carried out in the laboratory for situations that may occur in actual working conditions. Explore the adaptability of seed compensator device to different working conditions under different seeding speeds, different consecutive missed numbers and different speed change rates.
Results and Discussion
In order to experiment the influence of the quantification rate of replanting under different working conditions, the quantification rate as an indicator was selected, and five-level single-factor experiments were carried out on the seeding speed, the number of consecutive missing seeds, and the speed change rate. The experiment counted 30 seeds orientation in each group, and each experiment repeated three times for each level and took the average value. The single-factor test results are shown in Table 9.
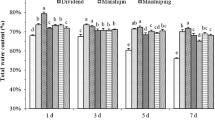
According to the single-factor experiment results, the relationship between seeding speed, the number of consecutive missing seeds, speed change rate and qualification rate is shown in Fig. 25

The trend chart of qualification rate
The variance analysis was carried out on the experiment results, and the analysis results are shown in Table 10.
The quantification rate showed a downward trend with the increase in seeding speed, but it had a high quantification rate when the seeding speed was less than 17.12 rpm. When the seeding speed was greater than 17.12 rpm, the quantification rate was obviously reduced. The high seeding speed would shorten the detection time of the sensor, resulting in a major recognition error. At the same time, the analysis of variance on the experimental data showed that the P value of the seeding speed on the quantification rate was 0.000, which confirmed that the seeding speed had a significant impact on the quantification rate.
The quantification rate presented a trend of increasing first and then decreasing, but the overall decrease and the change range were small (less than 10%). And it could be 90% quantification rate when the number of consecutive missed seeds was less than 3 roots. The variance results shown that the P value was 0.046, indicating that the number of consecutive missed seeds had a significant impact on the s quantification rate.
The quantification rate first rose linearly and then decreased with the change of the speed change rate and then stabilized. It also reached the maximum at 0% speed change rate. Both were in an inverted V shape, but the overall quantification rate changed slightly (less than 5%), indicating that the compensator system had nice adaptability to speed fluctuations. The variance results showed that the P value was 0.688, indicating that the speed change rate had no significant influence on the recognition rate and the quantification rate.
In summary, a single-factor experiment was carried out according to the selected seeding speed, the number of continuous missing seeds and the rate of speed change. The results showed that the seeding speed and the number of continuous missing seeds had a significant impact on the quantification rate, and the speed change rate had no effect on the quantification rate. The compensator system had a better speed following ability when it was less than 17.12r/min, and maintained a better quantification rate with fewer missing seeds. The system was less affected by the fluctuation of speed, indicating that the system could be achieved under different working conditions and demonstrated excellent work performance.
Conclusion
-
(1)
This paper designed a seed compensator device for the transversal double-bud sugarcane planter with seed pre-cutting to solve the following problems. It could handle the question of high missing rate for seed-metering device, and deal with the issue of the poor continuity for the seed compensator. According to the movement analysis of seed during the replanting process, its main parameters were determined by simulation experiments.
-
(2)
The simulation results manifested that the sprocket speed had no significant effect on the speed of seed throwing in the storage space, but the size of seed had a significant effect on the rate of seed casting. The slot height of the right wall is too low or too high would lead to the phenomenon of stuck seed. When the slot height is 24 mm, the roller rake has the best seed cleaning effect. The closer the baffle angle was to 90°, the lower the probability of seed sticking occurred. When the baffle angle was 85°, the lower frequency of contact force was the best. With the increase in the offset distance, the probability of card species decreases.
-
(3)
The verification experiment of the seed compensator device was carried out on the self-developed experiment platform to verify the continuity of seed filling and seed cleaning. It was proved that the seed compensator device could match the seed-metering device, reduce the seed leakage rate and improve the economic benefit. The mean values of each index were 1.10% of the empty slot rate, 3.79% of the seed sticking rate, 1.29% of the replanting rate and 96.21% of the qualification rate.
-
(4)
The single-factor experiment showed that the compensator system had a better speed following ability when it was less than 17.12r/min, and maintains a better quantification rate with fewer missing seeds. Moreover, it was less affected by the fluctuation of speed.
References
Al-Yamani, A.A., S. Mitra, and E.J. McCuskey. 2005. Optimized Reseeding By Seed Ordering and Encoding. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems 24 (2): 264–270.
Cao, Y.L. 2016. Improvement and experiment of 2CZQ-2 type sugarcane planter. South China Agricultural University.
Han, J., S. Wen, Q.T. Liu, J.Y. Wu, J.C. Xu, J.R. Wu, C.H. Ou, and W.H. Yan. 2019. Design and experiment of pre-cutting type sugarcane planter. Journal of South China Agricultural University 40 (04): 109–118.
He, Y.L., F. Wu, S.P. Li, T.X. Liu, Y.F. Yu, and Z.L. Deng. 2020. Design and experiment of replenishment system for sugarcane horizontal planter. Transactions of the Chinese Society for Agricultural Machinery 51 (01): 94–102.
Huang, Y.Q., X.B. Wang, K. Yin, and M.Z. Chen. 2015. Design and experiments of buds-injury-prevention system based on induction-counting in sugarcane-seeds cutting. Transactions of the Chinese Society of Agricultural Engineering 31 (18): 41–47.
Krishna, C.V., A. Jas, and N.A. Touba. 2004. Achieving high encoding efficiency with partial dynamic LFSR reseeding. ACM Transactions on Design Automation of Electronic Systems 9 (4): 500–516.
Li, S.P., W. Zhang, Z.X. Huang, R. Xiang, H.N. Mo, and J.C. Hu. 2020. Stability of carriages of self-propelled sugarcane transporters based on discrete element method. Transactions of the Chinese Society for Agricultural Machinery 51 (02): 374–382.
Lu, Q.Y., R. Li, Z.X. Zheng, S.J. Hong, and S.N. Wang. 2020. Design and prototype experiment of a new type sugarcane planter. Journal of Agricultural Mechanization Research 42 (02): 79–84.
Luo, X.W., T. Liu, E.C. Jiang, and Q. Li. 2007. Design and experiment of hill sowing wheel of precision rice direct-seeder. Transactions of the Chinese Society of Agricultural Engineering 03: 108–112.
Ma, F.L., T.X. Liu, S.P. Li, X.H. Luo, F. Wu, and Y.F. Yu. 2020. Design and Experiment of Transverse planter for Pre–cut Sugarcane. Transactions of the Chinese Society for Agricultural Machinery 51 (07): 72–81.
Naik, R., N.V. Nair, S.J.K. Annamalai, and N.R. Prasad. 2013. Studies on mechanization of planting of sugarcane bud chip settlings raised in portrays. Sugar TeCh 15 (1): 27–35.
Niu, K., L.M. Zhou, Y.W. Yuan, Y.C. Liu, and X.F. Fang. 2016. Design and experiment on automatic compensation system of spoon-chain potato metering device. Transactions of the Chinese Society for Agricultural Machinery 47 (S1): 76–83.
Ruggeri, G., and S. Corsi. 2019. An analysis of the Fairtrade cane sugar small producer organizations network. Journal of Cleaner Production 240 (10): 118191.
Shi, C.Y., M.L. Wang, X.R. Liu, H.L. Huang, D.Q. Zhou, and G.R. Deng. 2019. Node recognition for different types of sugarcane based on machine vision. Journal of Computer Applications 39 (04): 1208–1213.
Singh, T.P., and D.M. Mane. 2011. Development and laboratory performance of an electronically controlled metering mechanism for okra seed. AMA, Agricultural Mechanization in Asia, Africa and Latin America 42 (2): 63–69.
Xia, J.F., C.Y. Xu, and Y. Zhou. 2007. Virtual prototype design and analysis of seed compensator based on ADAMS. Journal of Huazhong Agricultural University 3: 149–152.
Zhang, H.B., J. Zhao, G.R. Hu, L.X. Bu, Z.W. Wang, C. Qi, B. Han, and J. Chen. 2020a. Parameter optimization of wheat seeding device with nest round wheel. Journal of Agricultural Mechanization Research 42 (09): 139–144.
Zhang, Q.Y., S. Wen, D.P. Feng, and T. Li. 2020b. Design and experiment of automatic seeding system for pre-cutting seed sugarcane planter. Journal of Hubei Polytechnic University 36 (03): 1–7.
Zhong, J.Q., L.M. Tao, S.P. Li, F.L. Ma, and Y.L. Chen. 2021. Design and evaluation of a novel transversal double-bud sugarcane planter with seed pre-cutting. Sugar Tech. https://doi.org/10.1007/s12355-020-00927-7.
Zhu, R.X., S.Q. Ge, C.Y. Zhai, X.L. Yan, Y.P. Shi, C.X. Li, and S.S. Huang. 2014. Design and experiment of automatic reseeding device for miss-seeding of crops with large grain. Transactions of the Chinese Society of Agricultural Engineering 30 (21): 1–8.
Acknowledgements
The research presented in this paper was partially supported by Key project of Guangxi science and Technology development (2018AB01002), Open Project of state Key Laboratory for protection and Utilization of Subtropical Agricultural Biological Resources (SKLCUSA-b201706), and Research on critical technologies and mechanisms of continuous precise planting for transversal double-bud sugarcane planters (52165009).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gan, F., Liang, Y., Zhang, Y. et al. Design and Experiment of Seed Compensator Device for Transversal Sugarcane Planter with Seeds Pre-Cutting. Sugar Tech 24, 1551–1569 (2022). https://doi.org/10.1007/s12355-021-01092-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12355-021-01092-1