
Abstract
In this paper, we delve into the study of Lie symmetries and conservation laws for fractional partial differential equations featuring mixed derivatives of fractional and integer orders. Firstly, we explore the Lie symmetries permitted by the (2+1)-dimensional time-fractional dissipative long-wave system. Subsequently, leveraging these symmetries, we reduce the original (2+1)-dimensional partial differential equations to (1+1)-dimensional counterparts. We then proceed to develop explicit power series solutions along with several exact solutions. Lastly, employing the concept of nonlinear self-adjointness in the fractional context, we establish the conservation properties of the system, resulting in the derivation of novel non-trivial conservation law.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Since the 19th century, linear system theory can no longer meet the needs of reality, thus promoting the rapid development of nonlinear system theory. Among them, nonlinear partial differential equations, as a hotspot in the field of nonlinear scientific research, have been widely used to describe problems in many fields such as mathematics, physics, chemistry, sociology and biology [1,2,3,4]. With the continuous progress of science and technology, many phenomena cannot be described by integer-order differential equations only. For example, in the financial field, stock price fluctuations are affected by a variety of factors, including market sentiment, policy changes, etc. These changes have memory effects and cannot be simply described by integer-order nonlinear differential equations. Thus, the rapid development of fractional order nonlinear differential equations is promoted. Various methodologies for solving fractional partial differential equations have been proposed and developed by scholars both domestically and internationally. These include the first integration method [5], the F-expansion method [6, 7], and the fractional sub-equation method [8, 9], among others.
The Lie symmetry group theory is crucial in analyzing integer-order PDEs, particularly for constructing their exact solutions, and has been extensively developed [10,11,12]. Consequently, many researchers have extended this theory to fractional PDEs. In literature [13,14,15], Professor Zhang and his team studied the symmetry determination and nonlinearization of nonlinear temporal fractional partial differential equations, its local symmetric structure and potential symmetry, and the symmetric structure of multidimensional temporal fractional partial differential equations. These research results are of great significance to the development of symmetry analysis of fractional differential equations. The main idea of the Lie group is that the order of a differential equation can be constructively lowered by 1 place if the equation does not change under the conditions of the Lie transformation. Through this theory, scientists have unified the previous haphazard solution methods and proposed symmetric and group-invariant solutions, simplifying the troubles that existed in the computational process.
Recently, studies [16,17,18] have examined the following dissipative long-wave system:
The (2+1)-dimensional dissipative long-wave system delineates the hydrodynamic water wave model in broad channels or open seas of finite depth. It also serves as an illustrative tool for nonlinear wave propagation in dissipative mediums. In [16], the authors discovered new families of non-traveling wave solutions using an extended projective Riccati equation method. In [17], a set of innovative rational solutions, along with their interactive counterparts, were discovered through the fusion of exponential and quadratic functions. In [18], several fresh exact interaction solutions were explicitly obtained, including trigonometric wave-soliton and soliton-trigonometric wave combinations, achieved through the application of Riccati expansion.
In this paper, we expanded the Lie symmetry analysis to encompass the (2+1)-dimensional time fractional dissipative long-wave system, presented as follows:
Up to now, most of the types of partial differential equations of fractional order studied using the Lie symmetry method are in the form of pure fractional order of time, pure fractional order of space, or both, while Lie symmetry results for partial differential equations with mixed derivatives of fractional and integer orders are very limited. Moreover, when both spatial and time fractional order derivatives play an important role, the mixed derivatives may have different physical significance. Therefore it is necessary to study this class of equations. The symbol \(D^\alpha _t\) represents the Riemann-Liouville fractional derivative, defined in [19,20,21], namely,
for \(t>a\). We denote the operator \(_{0}D^{\alpha }_{t}\) as \(D^{\alpha }_{t}\) throughout this paper, while \(D^{-\alpha }_{t}=I^{\alpha }_{t}\) is Riemann-Liouville fractional integral.
The objectives of this paper include deriving the symmetry, one-parameter Lie transformation group, exact solutions, optimal system, similarity reduction, and conservation laws for the models under consideration. To the best of the author’s knowledge, these findings have not been reported elsewhere.
2 Lie symmetry analysis of Eq. (1.2)
Drawing upon the Lie group method [22,23,24], we can define a one-parameter Lie group of infinitesimal transformations that operate on both the independent and dependent variables
where \(t^*, x^*, y^*, \tau , \xi , \theta , \eta \) and \(\zeta \) represent real functions of t, x, y, u, and v, while \(\epsilon \) serves as a parameter for the infinitesimal transformation.
The generators of Lie point symmetry for a One-Parameter Lie Group (2.1) can be represented in vector form
where \(\tau , \xi , \theta , \eta , \zeta \) meet the following conditions:
with
The prolongation of the operator X takes on the following form
where the explicit expressions for \(\eta ^{t}_{\alpha }\), \(\eta ^{x}\), \(\zeta ^x\),\(\zeta ^{y}\), \(\eta ^{xx}\), \(\zeta ^{xy}\), \(\zeta ^{xxy}\) can be found in reference [25, 26]. Given the absence of a chain rule for fractional derivatives, we posit that \(\zeta \) is linear in v. Employing the generalized Leibniz rule [25], we derive the expression for \(\zeta ^{ty}_{\alpha +1}\) as follows
Substituting the expression \(\eta ^{t}_{\alpha }\), \(\eta ^{x}\), \(\zeta ^x\),\(\zeta ^{y}\), \(\eta ^{xx}\), \(\zeta ^{xy}\), \(\zeta ^{xxy}\), and \(\zeta ^{ty}_{\alpha +1}\) into (2.3) and equating the coefficients of various derivatives of u and v to zero, we deduce the infinitesimals as follows
where \(c_1\), \(c_2\) and \(c_3\) are arbitrary constants. So system (1.2) admits the three-dimension Lie algebra spanned by
3 Similarity reductions and invariant solutions of System (1.2)
In this section, reduction equations for System (1.2) are derived using the Lie Symmetry Generators (2.8). These reduction equations enable the construction of analytic solutions for System (1.2).
Case 1: \(X_2=\frac{\partial }{\partial x }\)
The characteristic equation associated with the group generator \(X_2\) is
The subsequent group-invariant solutions can be acquired as follows:
By substituting (3.2) into System (1.2), we derive the ensuing reduced system:
from which, we can obtain the following solution:
where \(F_1(y)\) and \(F_2(y)\) are arbitrary functions about y. Figure 1 illustrates the dynamic behavior of the solution (3.4) under varying parameters.

Contour plot of solution (3.4) for \(F_1(y)=y^2, F_2(y)=sin(y)\)
Case 2: \(X_3=\frac{\partial }{\partial y }\)
The characteristic equation corresponding to the group generator \(X_3\) is
By solving the above system, we can obtain the following invariant and invariant solutions
By substituting (3.6) into System (1.2), we derive the ensuing reduced system:
from which, we can obtain the following solution:
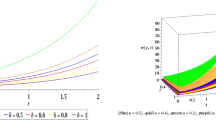
where a, b are arbitrary constants and H(t) is an arbitrary function on t. Figure 2 illustrates the dynamic behavior of the solution (3.8) under varying parameters.

Contour plot of solution (3.8) for \(a=1, b=1, H(t)=t^{0.2},t^{0.4},t^{0.6}\)
Case 3:
\(X_1=t\frac{\partial }{\partial t }+\frac{\alpha }{2 }x\frac{\partial }{\partial x }-\frac{\alpha }{2 }u\frac{\partial }{\partial u }-\frac{\alpha }{2 }v\frac{\partial }{\partial v }\)
The characteristic equation associated with the group generator \(X_1\) is as follows:
Hence, we derive the similarity variables as follows \(xt^{-\frac{\alpha }{2 }}\), y, \(ut^{\frac{\alpha }{2 }}\) and \(vt^{\frac{\alpha }{2 }} \). Thus, we deduce the invariant solution of system (1.2) as follows
Theorem 3.1
The similarity transformations \(u(t,x,y)=t^{-\frac{\alpha }{2 }}f(\omega _1,\omega _2), v(t,x,y)=t^{-\frac{\alpha }{2 }}g(\omega _1,\omega _2),\) with the similarity variables \(\omega _1=xt^{-\frac{\alpha }{2 }}\), \(\omega _2=y\) reduces system (1.2) to the (1+1)-dimensional fractional partial differential system given by
where \((\mathcal {P}^{\iota ,\kappa }_{\delta _1,\delta _2})\) is the left-hand Erdélyi-Kober fractional differential operator defined by
where
is the left-hand Erdélyi-Kober fractional integral operator.
Proof
For \(0<\alpha <1\), the Riemann–Liouville time fractional derivative of v(t, x, y) can be obtained as follows:
Assuming \(r=\frac{t }{s}\), we have
Because of \(\omega _1=xt^{-\frac{\alpha }{2}}\) and \(\omega _2=y\), the following relation holds:
Hence, we arrive at
Similarly
Meanwhile,
This completes the proof. \(\square \)
Finding exact solutions to the reduced system (3.11) is challenging. Next we use the power series method to derive the power series solution of the reduced system (3.11). Let us assume
then
and
where \(B(p,q)=\int _{0}^{1}x^{p-1}(1-x)^{q-1}dx\) is a beta function, and \(\alpha \) must satisfy \(1-\frac{(n+1)\alpha }{2}>0\) and \(1-\alpha >0\).
Similarly
Substituting (3.15)–(3.17) into the reduced system (3.11) and equating the coefficients of different powers of \(\omega _1^n\omega _2^m\), we can obtain the explicit expressions of \(a_{n,m}\) and \(b_{n,m}\). That is,
For \(n,m\geqslant 0\), we have
where \(a_{n,m},b_{n,m},b_{m,0}\ (n=0,1; m=0,1,2,\cdots )\) are arbitrary constants. It means that the power series solution of system (3.11) is
Therefore, the power series solution of system (1.2) is
Remark
Following the method outlined in [27] and utilizing the explicit function theorem from [28], the power-series solutions provided by system (3.21) are proven to be convergent. The details of the proof are omitted here.
4 Conservation laws of system (1.2)
We utilize the concept of nonlinear self-adjointness to identify conservation laws for system (1.2). A local conservation law of system (1.2) is expressed as follows [11, 12, 29]
This holds identically for all solutions of system (1.2). Moreover, \((C_t, C_x, C_y)\) is referred to as the conserved current, where \(C_t, C_x\), and \(C_y\) are functions of t, x, y, as well as u, v, and their integer-order derivatives, fractional derivatives, and fractional integrals.
First, we will prove that system (1.2) is nonlinearly self-adjoint, as demonstrated in [29]. Following this, we will construct new, nontrivial conservation laws for system (1.2). We begin by assuming that the formal Lagrangian of system (1.2) is defined as follows
where \(\Phi _1\) and \(\Phi _2\) are three newly introduced dependent variables. According to the principle of functional extremum, we know that a necessary condition for the variation of the formal Lagrangian (4.2, \(J [u, v] = \int _{\mathbb {R}} dx \int _{\mathbb {R}} dy \int _{0}^{T} Ldt\), to have an extreme value is that the adjoint equations \( \delta L / \delta u = 0 \) and \(\delta L / \delta v = 0 \), are satisfied, where the Euler-Lagrange operators are defined as follows [30, 31]
The adjoint operator of \( \partial _t^\alpha \) is the right Caputo derivative \( ^C_t\partial _T^\alpha \), and system (1.2) is deemed nonlinearly self-adjoint when the adjoint equations, given nontrivial substitutions as \( \Phi _1 = \phi (t,x, y, u, v)\), and \(\Phi _2 = \rho (t,x, y, u, v)\), where \( \Phi _1^2 + \Phi _2^2 \ne 0\), satisfy the following conditions [32]
The functions \(k_i(t, x, y, u, v)( i = 1, 2, 3, 4)\) remain undetermined. By nullifying the coefficients of both the time-fractional derivatives and the integer-order derivatives of u and v, we establish a set of equations to determine \( k_i(t, x, y, u, v)\) for \( i = 1, 2, 3, 4\). Solving this system furnishes the necessary substitutions for nonlinear self-adjointness. It becomes evident that \(\phi (t, x, y, u, v) = c_1\), and \( \rho (t, x, y, u, v) = c_2\), where \( c_1^2 + c_2^2 \ne 0 \), confirming the nonlinear self-adjointness of system (1.2).
We utilize both the Noether identity and the nonlinear self-adjointness method to derive conserved vectors for system (1.2). The Noether identity associated with system (1.2) is represented as
Here, I represents the identity operator, \(N^t, N^x\), and \(N^y\) denote the Noether operators, PrX is determined by (2.5), and the Euler operators \(\frac{\delta }{\delta u}\) and \(\frac{\delta }{\delta v}\) are defined in (4.3).
To begin, we shift the terms \(W_1 \frac{\delta }{\delta u}\) and \(W_2 \frac{\delta }{\delta v}\) from the right side of Eq. (4.4) to the left side. Then, we apply the identity (4.4) to L, yielding
Rephrase prX as follows
where \(W_1=\eta -\tau u_t-\xi u_x-\theta u_y, W_2=\zeta -\tau v_t-\xi v_x-\theta v_y\), and \(D^\alpha _t \) is the fractional total derivative.
Lastly, we substitute Eqs. (4.3) and (4.6) into Eq. (4.5), and set \( c_1 = c_2 = 1 \). Then, employing integration by parts,
we acquire the following parts
where
which satisfies \(D_tJ(f(t),g(t))=f(t)_tI^{1-\alpha }_Tg(t)-g(t)_0I^{1-\alpha }_tf(t)\).
Thus, we can derive the general formula for the conservation law of system (1.2)
Next, leveraging the conservation law formula from (4.8) and the Lie symmetries outlined in (2.8), we construct several conservation laws for system (1.2).
Case 1: \(X_2=\frac{\partial }{\partial x }\)
The characteristic functions of \(X_2\) is
Therefore, for \(0<\alpha <1\),
which implies \(D_t(C^t)+D_x(C^x)+D_y(C^y)=-D_t(\Delta _1)-D_x(\Delta _2).\) Consequently, \(D_t(C^t+\Delta _1)+D_x(C^x+\Delta _2)+D_y(C^y)=0\) holds true universally, resulting in a trivial conservation law.
Case 2: \(X_3=\frac{\partial }{\partial y}\)
The characteristic functions of \(X_3\) is
Therefore, for \(0<\alpha <1\),
which implies \(D_t(C^t)+D_x(C^x)+D_y(C^y)=-D_y(\Delta _1)-D_y(\Delta _2)\). Consequently, \(D_t(C^t)+D_x(C^x)+D_y(C^y+\Delta _1+\Delta _2)=0\) holds true universally, resulting in a trivial conservation law.
Case 3: \(X_1=t\frac{\partial }{\partial t }+\frac{\alpha }{2 }x\frac{\partial }{\partial x }-\frac{\alpha }{2 }u\frac{\partial }{\partial u }-\frac{\alpha }{2 }v\frac{\partial }{\partial v }\)
The characteristic functions of \(X_1\) is
Therefore, for \(0<\alpha <1\),
These three conserved vectors give a new nontrivial conservation law for system (1.2), that is \(D_t(C^t)+D_x(C^x)+D_y(C^y)=(1-\alpha )\Delta _1+(1-\alpha )\Delta _2=0\), where the multiplier is \((1-\alpha ,1-\alpha )\).
5 Conclusion
Currently, most fractional partial differential equations studied using the Lie symmetry method are either purely of fractional time order or purely of fractional space order, encompassing both forms. However, there are very few results regarding the Lie symmetries of partial differential equations that involve mixed derivatives of fractional and integer orders. In this paper, we conduct Lie symmetry and conservation law analyses for the time-fractional (2+1)-dimensional dissipative long-wave system featuring Riemann-Liouville time-fractional derivatives. We identify explicit Lie symmetries and utilize them to reduce the system. Furthermore, we develop a power series solution and exact solutions. Additionally, we establish a general conservation law formula using the nonlinear self-adjointness method and derive significant conservation law.
Data availibility
No data were used for this work.
References
Fan, E.: Extended tanh-function method and its applications to nonlinear equations. Phys. Lett. A 277(4–5), 212–218 (2000)
Manafian, J., Lakestani, M.: Abundant soliton solutions for the Kundu–Eckhaus equation via tan \((\psi (\xi ))\)-expansion method. Optik 127(14), 5543–5551 (2016)
Raza, N., Zubair, A.: Bright, dark and dark-singular soliton solutions of nonlinear Schrödinger’s equation with spatio–temporal dispersion. J. Mod. Optic. 65(17), 1975–1982 (2018)
Raza, N., Rafiq, M.H., Kaplan, M., et al.: The unified method for abundant soliton solutions of local time fractional nonlinear evolution equations. Res. Phys. 22, 103979 (2021)
Ekici, M., Mehmet, M., et al.: Optical soliton perturbation with fractional-temporal evolution by first integral method with conformable fractional derivatives. Optik 127(22), 10659–10669 (2016)
Yıldırım, Y.: Optical solitons with Biswas–Arshed equation by F-expansion method. Optik 227, 165788 (2021)
Li, C., Chen, L., Li, G.: Optical solitons of space-time fractional Sasa–Satsuma equation by F-expansion method. Optik 224, 165527 (2020)
Ala, V., Demirbilek, U., Mamedov, K.R.: An application of improved Bernoulli sub-equation function method to the nonlinear conformable time-fractional SRLW equation. Aims Math. 5(4), 3751–3761 (2020)
Esen, H., Ozdemir, N., Secer, A., et al.: Solitary wave solutions of chiral nonlinear Schr\(\ddot{o}\)dinger equations. Mod. Phys. Lett. B 35(30), 2150472 (2021)
Kumar, S., Kumar, D., Kumar, A.: Lie symmetry analysis for obtaining the abundant exact solutions, optimal system and dynamics of solitons for a higher-dimensional Fokas equation. Chaos Soliton. Fract. 142, 110507 (2021)
Bluman, G W.: Applications of symmetry methods to partial differential equations. Springer, (2010)
Olver, P.J.: Applications of Lie groups to differential equations. Springer Science & Business Media, (1993)
Zhang, Z.Y.: Symmetry determination and nonlinearization of a nonlinear time-fractional partial differential equation. P. Roy. Soc. A-Math. Phys. 476(2233), 20190564 (2020)
Zhang, Z.Y., Lin, Z.X.: Local symmetry structure and potential symmetries of time-fractional partial differential equations. Stud. Appl. Math. 147(1), 363–389 (2021)
Zhang, Z.Y., Zheng, J.: Symmetry structure of multi-dimensional time-fractional partial differential equations. Nonlinearity 34(8), 5186 (2021)
De-Sheng, L., Hong-Qing, Z.: New families of non-travelling wave solutions to the (2+ 1)-dimensional modified dispersive water-wave system. Chin. Phys. 13(9), 1377 (2004)
Ren, B., Ma, W.X., Yu, J.: Rational solutions and their interaction solutions of the (2+ 1)-dimensional modified dispersive water wave equation. Comput. Math. Appl. 77(8), 2086–2095 (2019)
Liang, J., Wang, X.: Consistent Riccati expansion for finding interaction solutions of (2+ 1)-dimensional modified dispersive water-wave system. Math. Method. Appl. Sci. 42(18), 6131–6138 (2019)
Podlubny, I.: Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Elsevier, (1998)
Hilfer. R.: Applications of fractional calculus in physics. World scientific, (2000)
Kilbas, A.A., Srivastava, H.M., Trujillo, JJ.: Theory and applications of fractional differential equations. Elsevier, (2006)
Feng, W.: On symmetry groups and conservation laws for space-time fractional inhomogeneous nonlinear diffusion equation. Rep. Math. Phys. 84(3), 375–392 (2019)
Liu, J.G., Yang, X.J., Feng, Y.Y., et al.: Symmetry analysis of the generalized space and time fractional Korteweg-de Vries equation. Int. J. Geometr. Methods Modern Phys. 18(14), 2150235 (2021)
Liu, J.G., Zhang, Y.F., Wang, J.J.: Investigation of the time fractional generalized (2+ 1)-dimensional Zakharov-Kuznetsov equation with single-power law nonlinearity. Fractals 31(05), 2350033 (2023)
Sahadevan, R., Prakash, P.: On Lie symmetry analysis and invariant subspace methods of coupled time fractional partial differential equations. Chaos Soliton. Fract. 104, 107–120 (2017)
Sahadevan, R., Bakkyaraj, T.: Invariant analysis of time fractional generalized Burgers and Korteweg-de Vries equations. J. Math. Anal. Appl. 393(2), 341–347 (2012)
Gao, B., Zhang, Y.: Symmetries and conservation laws of the Yao-Zeng two-component short-pulse equation. Bound Value Probl. 2019, 1–16 (2019)
Rudin, W.: Principles of mathematia analysis, McGraw Hill, (1953)
Ibragimov, N.H.: Nonlinear self-adjointness and conservation laws. J. Phys. A-Math. Theor. 44(43), 432002 (2011)
Agrawal, O.P.: Fractional variational calculus and the transversality conditions. J. Phys. A: Math. Gen. 39(33), 10375 (2006)
Frederico, G.S.F., Torres, D.F.M.: A formulation of Noethers theorem for fractional problems of the calculus of variations. J. Math. Anal. Appl. 334, 834–846 (2007)
Lukashchuk, S.Y.: Conservation laws for time-fractional subdiffusion and diffusion-wave equations. Nonlinear Dynam. 80, 791–802 (2015)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Confict of interest
The authors have no conflict of interest to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shi, Y., Feng, Y. & Yu, J. Invariant analysis of the time-fractional (2+1)-dimensional dissipative long-wave system. Rend. Circ. Mat. Palermo, II. Ser (2024). https://doi.org/10.1007/s12215-024-01108-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12215-024-01108-1
Keywords
- Lie symmetry analysis
- Time-fractional (2+1)-dimensional dissipative lone-wave system
- Conservation laws
- Invariant solutions