
Abstract
The fatigue life prediction of metallic materials is always a tough problem that needs to be solved in the mechanical engineering field because it is very important for the secure service of mechanical components. In this paper, a combined nonlinear ultrasonic parameter based on the collinear wave mixing technique is applied for fatigue life prediction of a metallic material. Sweep experiments are first conducted to explore the influence of driving frequency on the interaction of two driving signals and the fatigue damage of specimens, and the amplitudes of sidebands at the difference frequency and sum frequency are tracked when the driving frequency changes. Then, collinear wave mixing tests are carried out on a pair of cylindrically notched specimens with different fatigue damage to explore the relationship between the fatigue damage and the relative nonlinear parameters. The experimental results show when the fatigue degree is below 65% the relative nonlinear parameter increases quickly, and the growth rate is approximately 130%. If the fatigue degree is above 65%, the increase in the relative nonlinear parameter is slow, which has a close relationship with the microstructure evolution of specimens. A combined nonlinear ultrasonic parameter is proposed to highlight the relationship of the relative nonlinear parameter and fatigue degree of specimens; the fatigue life prediction model is built based on the relationship, and the prediction error is below 3%, which is below the prediction error based on the relative nonlinear parameters at the difference and sum frequencies. Therefore, the combined nonlinear ultrasonic parameter using the collinear wave mixing method can effectively estimate the fatigue degree of specimens, which provides a fast and convenient method for fatigue life prediction.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
For most mechanical components, fatigue failure is the main failure form, for which the ratio is approximately 80%. Fatigue life is the cycle or time of metallic component failure, which is very important for secure service of components (Ref 1). However, because of complex fatigue loading, fatigue life prediction is a very difficult problem.
The common fatigue life prediction methods are the nominal stress method, the local stress method and the stress field intensity method. The nominal stress method (Ref 2) is a traditional fatigue life estimation method. However, this method does not take into account the local plasticity of the notch root, and the equivalent relationship of the standard specimens and structural components is difficult to determine; thus, there is a large discrepancy between predicted life and actual life. The local stress method (Ref 3) is a relatively simple fatigue life estimation method that estimates the fatigue crack initiation life and has high precision, but it does not consider the influence of stress gradient at the stress concentration zone, and there are certain limitations. The stress field intensity method (Ref 4) is a good method for fatigue assessment, but the selection of the size of the notched damage zone and the weight function cause some difficulties and uncertainties in fatigue evaluation. Therefore, it is necessary to select a convenient and effective fatigue life prediction method.
With the development of nondestructive testing techniques, they have been widely applied in aspects of mechanical fields, for example, fatigue damage evaluation. The commonly used nondestructive detection method is the ultrasonic method, which has the characteristics of high resolution, high penetration and no harm to the human body.
The traditional ultrasonic method applies the variation of linear parameters, for example, the wave velocity and ultrasonic attenuation coefficient, for fatigue evaluation. However, linear parameters are not sensitive to earlier fatigue damage or microscopic cracks, which is important for fatigue life prediction. Recent studies have shown that the nonlinear ultrasonic method can effectively evaluate and detect microscopic cracks (Ref 5) and fatigue damage (Ref 6) of materials. The effectiveness of this method is much higher than that of the traditional ultrasonic method (Ref 7, 8). The harmonic generation and nonlinear modulation technique (Ref 9) are two common nonlinear ultrasonic methods. The former is based on the theory that the waveform of driving signals is distorted because a nonlinear elastic response of the material and higher harmonics are generated. In practical application, the average nonlinear parameter in the region between the transmitter and receiver is measured to characterize the damage of a specimen (Ref 8), but the spatial resolution is limited (Ref 10); experimental instruments, transducers and couplers produce nonlinearity; and it is difficult to distinguish whether the measured nonlinearity comes from the fatigue damage or the instruments.
The nonlinear modulation technique is an alternative method to overcome limitations of the harmonic generation method. It applies the theory that a new wave may be generated when two driving signals meet in the material if certain conditions are satisfied (Ref 10). Structural damage of material has a close relationship with the new wave. The technique, based on the vibro-modulation method, is studied in the related literature (Ref 11); however, the frequency of the vibration signal is difficult to precisely control. The ultrasonic modulation technique is widely used and can be divided into two methods depending on the incident directions of the two driving waves: collinear wave mixing and non-collinear wave mixing (Ref 12).
The collinear wave mixing method was used by Jiao et al. (Ref 13) and Li et al. (Ref 14) to detect microscopic cracks and quantitatively evaluate the intergranular corrosion of austenitic stainless steel, and the acoustic nonlinearity parameter was estimated, which was concerned with the corrosion degree of specimens. Liu et al. (Ref 10) presented a new acoustic nonlinearity parameter, which was associated with the interaction of a longitudinal wave and a shear wave in isotropic elastic solids; the parameter was well correlated with the plastic deformation of material.
These studies show the effectiveness of the wave mixing technique in detecting micro-defects and quantitatively evaluating performance degradation. However, there is little information on estimating the fatigue degree and predicting the fatigue life of metal materials (Ref 15). It is necessary to establish a model that can effectively estimate the degree of fatigue and easily predict the fatigue life of metal materials. Because the ultrasonic nonlinear parameter is related to the fatigue state of specimens, the relationship between the ultrasonic nonlinear parameter and fatigue degree can be applied to estimate the fatigue degree of specimens according to the variation rule of the ultrasonic nonlinear parameter in the process of fatigue and the accumulated damage theory.
Therefore, the collinear wave mixing method is applied to estimate the fatigue degree and evaluate the fatigue life of metal materials. First, the influence of driving frequencies on the interaction of two driving signals and damage is studied in order to select the optimal parameter for wave mixing experiments. Then, experiments are conducted on specimens with different fatigue degrees to explore the relationship between the relative nonlinear parameter and fatigue degree; the combined nonlinear ultrasonic parameter is selected to study the relationship; and a model based on the relationship is established to estimate the fatigue degree and predict the fatigue life of metal materials.
Nonlinear Theory of Wave Mixing
When a longitudinal wave propagates in an isotropic solid, the one-dimensional nonlinear elastic wave equation can be written as (Ref 16, 17)
where u(x, t) is the displacement, \( c = \sqrt {{E \mathord{\left/ {\vphantom {E \rho }} \right. \kern-0pt} \rho }} \) is the velocity of the longitudinal wave in the solid, x is the propagation distance, and β is the ultrasonic nonlinear parameter.
Because the nonlinearity of the isotropic solid is very weak, perturbation theory is applied to solve Eq 1; the solution can be expressed as
where \( u^{0} \left( {x,t} \right) \) represents the linear displacement, while \( u^{1} \left( {x,t} \right) \) represents the nonlinear displacement.
Suppose that the nonlinear displacement is concerned with the propagation distance,
where \( \tau = t - {x \mathord{\left/ {\vphantom {x c}} \right. \kern-0pt} c} \) and \( f\left( \tau \right) \) is a new function, which needs to be determined.
Two longitudinal waves with frequencies f 1 and f 2 and amplitudes A 1 and A 2 are given as the driving signals. Regardless of the acoustic attenuation and the initial phase difference, the driving signal is set as
To solve the expression of \( f\left( \tau \right) \), Eq 3 and 4 are substituted into Eq 2 and then into Eq 1,
Equation 2 can be expressed as
From Eq 6, in addition to the driving frequencies f 1 and f 2, there are second harmonic frequencies 2f 1 and 2f 2 and sideband frequencies f 1 + f 2 and f 1 – f 2. The amplitudes of the two driving signals and of the difference and sum frequency signals are A(f 1) = A 1, A(f 2) = A 2, \( A\left( {f_{1} - f_{2} } \right) = \frac{{\beta xA_{1} A_{2} k_{1} k_{2} }}{4} \) and \( A\left( {f_{1} + f_{2} } \right) = \frac{{\beta xA_{1} A_{2} k_{1} k_{2} }}{4} \), where the magnitude of the sideband signals is the same.
If the amplitudes of every frequency are known from measured signals, the nonlinear parameter β can be calculated as (Ref 18)
where k 1, k 2 and x are parameters associated with the system. To simplify the study, the relative nonlinear parameter can be written as
Therefore, the relative nonlinear parameters can qualitatively characterize the nonlinearity of specimens. Because of the ultrasonic attenuation in actual application, the amplitudes of the difference and sum frequency signals are not the same; therefore, the relative nonlinear parameters of difference frequency β - and sum frequency \( \beta_{ + } \) are different when evaluating the nonlinearity of specimens.
Experimental Setup and Specimens
Experimental Setup for Collinear Wave Mixing Technique
The collinear wave mixing experiment based on bilateral incentive uses the RAM-5000 system; the schematic and the physical map of experiments are illustrated in Fig. 1.

(a) The schematic and (b) the physical map of the collinear wave mixing experiment for cylindrically notched specimens
In Fig. 1, the RAM-5000 system generates two 30-cycle tone bursts with frequencies of f 1 and f 2 to excite two piezoelectric transducers T1 and T2 located at the opposite ends of the specimen; the tone bursts pass a 50-Ω matching resistance and an adjustable attenuator to protect transducers. Before the experiment, parameters of the RAM-5000 system are set as listed in Table 1. Transducer T1 acts as a transmitter with central frequency of 2.5 MHz; T2 acts as both a transmitter and a receiver with central frequency of 5 MHz. When two driving signals meet in the specimen where the fatigue damage exists, nonlinear interaction occurs, and a new wave with a frequency of f 2 + f 1 or f 2 − f 1 is produced; the schematic diagram is shown in Fig. 2. The new wave is picked up by the transducer T2 and transferred to the RAM-5000 system, where the function is completed by a diplexer. The receiving signals are recorded with the oscilloscope Tektronix MDO3022. To reduce random error, every experiment is repeated eight times. The relative nonlinear parameters of the difference and sum frequencies are calculated from the frequency spectrum of received signals.

Schematic diagram of the collinear wave mixing technique when two signals meet in the specimen where the fatigue damage exists; the nonlinear interaction occurs; and a new wave with difference or sum frequency is produced
Fatigue Tests
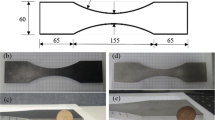
To study the relationship between the relative nonlinear parameter and fatigue damage of specimens, cylindrically notched specimens, which are standard specimens, are used to conduct the collinear wave mixing experiments. There are nine specimens, p1, p2, p3, p4, p5, p6, p7, p8 and p9; the dimensions of the specimens are shown in Fig. 3. The material is 40Cr steel, the length is 200 mm, and the diameter is 22.5 mm; there is a circular groove of depth 5 mm and radius 2.8 mm in the middle of the long direction where the stress is concentrated. To obtain specimens with different damage levels, the fatigue test is conducted on a high-temperature torsion fatigue testing machine MTS809. Specimens p1, p2, p3, p4 and p5 are conducted the interrupt fatigue test to study the relationship between the relative nonlinear parameter and fatigue degree when the theoretical fatigue degree is 0, 15, 25, 35, 45, 55, 65, 75, 85 and 90%; the fatigue test is stopped; and collinear wave mixing experiments are conducted to build the model for fatigue life prediction. Specimens p6 and p7 with different fatigue degrees, 25, 45, 65 and 85%, are test samples to verify the model.

Dimensions of cylindrically notched specimens
When the damage degree of specimens p1, p2, p3, p4 and p5 is 90%, specimens are not broken. To analyze the fatigue fracture morphology, specimens are fractured at the notch position by static tensile; microscopic and macroscopic analyses using a scanning electron microscope (SEM) are applied to identify the fracture. The fracture is also analyzed for specimens p8 and p9 with fatigue degree of 15 and 65%.
The Selection of the Optimal Driving Frequency for the Collinear Wave Mixing Experiment
In the collinear wave mixing experiments, the frequencies of the two driving signals are extremely important to the accuracy and reliability of the experimental results; the selection of optimal driving frequencies must synthetically consider the frequency response of the system consisting of the specimen, transducer and instruments. Figure 4(a) and (b) displays the frequency response of transducer T1 with central frequency 2.5 MHz and T2 with central frequency 5 MHz. From Fig. 4, the driving frequency f 1 is selected at 1.8 MHz, which is fixed, and the exciting frequency f 2 varies from 3.7 to 5.5 MHz. To select the most suitable driving frequency f 2, two specimens with theoretical fatigue degrees of 15 and 90% are selected to conduct the sweep experiment when the frequency f 2 changes and the nonlinear interaction between the two exciting signals and fatigue damage occurs. Using the super heterodyne function of the RAM-5000 system, the amplitudes of sidebands at the difference and sum frequencies are obtained when the driving frequency f 2 changes from 3.7 to 5.5 MHz, as shown in Fig. 5.

Frequency response for the transducer of (a) T1 with a central frequency of 2.5 MHz and (b) T2 with a central frequency of 5 MHz

Amplitude–frequency dependence of sidebands at (a) the difference frequency and (b) the sum frequency detected in specimens with 90 and 15% fatigue damage when the driving signal frequency f 2 changes from 3.7 to 5.5 MHz and the driving frequency f 1 is 1.8 MHz
As seen in Fig. 5(a), when the frequency f 2 is 4.8 and 5.45 MHz, the amplitudes of difference frequency signals reach the local maximum. In Fig. 5(b) when the frequency f 2 is 3.88, 4.55 and 4.8 MHz, the amplitudes of sum frequency signals achieve the local maximum. Comprehensively comparing the amplitudes of the difference and sum frequency signals at 3.88, 4.55, 4.8 and 5.45 MHz, the sidebands’ amplitudes are the local maximum at the difference and sum frequencies when the frequency f 2 is 4.8 MHz, which illustrates that the nonlinearity of specimens is fully displayed when the frequencies of the two driving signals are 1.8 and 4.8 MHz. Therefore, in the collinear wave mixing experiment, two driving frequencies at 1.8 and 4.8 MHz are selected.
Results and Discussion
Results of Collinear Wave Mixing Experiment
As seen in Fig. 5(a) and (b), for the specimen with 15% fatigue degree, the amplitudes of sidebands at the difference and sum frequencies are relatively small; they are below 0.4 V and not sensitive to the variation of driving frequency f 2, illustrating that the nonlinearity of the specimen is very weak. For the other specimen with 90% fatigue degree, the amplitudes of sidebands are quite susceptive to the variation of f 2 and much larger; furthermore, there are multiple local maximums. The variation trend of the amplitudes of sidebands seriously relies on the fatigue or damage degree of specimens and can be used to qualitatively analyze the fatigue degree of specimens.
When the optimal driving frequencies are 1.8 and 4.8 MHz, specimens with different fatigue degrees are tested in the collinear wave mixing experiments. The time domain and frequency spectrum of receiving signals are shown in Fig. 6.

(a) The time domain and (b) the frequency spectrum of the receiving signal in the collinear wave mixing experiment when the driving frequencies are 1.8 and 4.8 MHz
As seen in Fig. 6(a), the receiving signals are transient at the beginning and the end, and steady state in the middle. To exactly analyze the variation rule of the relative nonlinear parameter at the difference and sum frequencies, the fast Fourier transform is utilized to analyze the steady signal. For the frequency spectrum shown in Fig. 6(b), the signals are very complex, and there are several peaks that contain the driving frequencies 1.8 and 4.8 MHz, the first-order sidebands 3 and 6.6 MHz, the second-order sidebands 1.2 and 8.4 MHz, and the second harmonic 3.6 MHz and third harmonic 5.4 MHz of f 1. Because the ultrasonic attenuation is related to the ultrasonic frequency, the amplitudes of the first-order sidebands at the difference and sum frequencies are different, 0.4218 and 0.5521 V, respectively.
The relative nonlinear parameters at the difference and sum frequencies are applied based on amplitudes of fundamental waves and the first-order sidebands to characterize and evaluate the fatigue degree of specimens. The relative nonlinear parameters of the difference frequency β - and the sum frequency \( \beta_{ + } \) for specimens p1, p2 and p3 are calculated from the frequency spectrum of receiving signals; variation curves of the relative nonlinear parameters are shown in Fig. 7 as a function of fatigue degree.

Relationship of the fatigue degree of specimens and the relative nonlinear parameter at (a) the difference frequency and (b) the sum frequency in the collinear wave mixing experiment
As seen in Fig. 7, when the specimens are undamaged, the relative nonlinear parameters at the difference frequency of three specimens are 0.1197, 0.1239 and 0.1187 V−1 in Fig. 7(a), while the parameters at the sum frequency are 0.1387, 0.1418 and 0.1359 V−1 in Fig. 7(b). When the fatigue degree increases to 65%, the parameter at the difference frequency becomes 0.2891, 0.2977 and 0.2886 V−1, and the growth is approximately 140%, while the parameter at the sum frequency increases to 0.3146, 0.3148 and 0.3091 V−1, and the growth is 130%. When the fatigue degree is above 65%, the relative nonlinear parameters at the difference and sum frequencies tend to be saturated. Therefore, Fig. 7 indicates that the relative nonlinear parameters at the difference and sum frequencies for specimens p1, p2 and p3 monotonously increase with the fatigue degree of specimens. Although there are some differences among the three specimens for the same damage degree, the variation trend is consistent. When the fatigue degree of specimens is below 65%, the relative nonlinear parameters increase relatively quickly; above 65% the increase trend becomes slow, especially for the relative nonlinear parameter at the sum frequency.
Because the nonlinearity of metal materials mainly results from dislocations, microscopic cracks and other defects, with the action of alternating load, the stress concentration zone of the specimen would first show dislocation, which is the earlier stage of mechanical performance degradation. Because the dislocations are very few, the nonlinear parameter is relatively small and the increment is low when the fatigue degree is below 15%, as shown in Fig. 7. With the increase in cycles, the dislocation spacing and dislocation density magnify, the stress concentration area appears as microscopic cracks, the size of the cracks gradually increases, and some microscopic cracks begin to merge into macroscopic cracks; thus, the relative nonlinear parameter increases monotonously, and the increment trend is relatively fast when the fatigue degree increases to 65%. When the fatigue degree is greater than 65%, macroscopic cracks of specimen appear and the attenuation coefficient of the material increases. Because the ultrasonic attenuation is related to the square of frequency, the attenuation for the sum frequency signal is higher than that for fundamental waves; therefore, the relative nonlinear parameter at the sum frequency tends to be saturated, while the increment trend of the relative nonlinear parameter at the difference frequency becomes slow. Therefore, the relative nonlinear parameter has a close relationship with the microstructure of specimens; the experimental results reveal the internal relations of the ultrasonic nonlinear property, the fatigue damage and the microstructure of specimens.
The Fatigue Fracture Morphology Analysis
SEM is applied to identify the fracture of specimens, and the macroscopic and microscopic photographs are shown in Fig. 8.

Macrostructure and microstructure of fatigue fracture morphology: (a) macrostructure of fracture, (b) microstructure of fracture, (c) microstructure of fatigue crack propagation zone, (d) microstructure of tensile fracture zone and (e) microstructure of fatigue source zone
From Fig. 8(a), an obvious fatigue crack propagation zone and a tensile fracture zone can be observed. The macrostructure of the fatigue fracture contains the fatigue source zone initiating at the specimen surface, the fatigue crack propagation zone which is arc-shaped or fan-shaped and located at the edge of fracture, and the tensile fracture zone located at the middle area of the fracture where the surface becomes coarser. Because specimens endure the torsion fatigue test and multiple fatigue sources are formed, there are multiple propagation zones around the edge of the fracture. Due to the stress of the fatigue test is large, fatigue cracks form once the crack nucleates, which accelerates the extension of cracks until the specimen fractures; thus, the proportion of the fatigue crack propagation zone is relatively small in the whole fatigue fracture. In Fig. 8(a), the rectangular areas marked b, c and d are magnified and shown in Fig. 8(b), (c), and (d).
Figure 8(b) shows the microstructure of the fracture; the fatigue source initiates at the specimen surface and spreads as an arc-shaped or fan-shaped area to form the fatigue crack propagation zone below the white curve. The fatigue source zone has been magnified and is shown in Fig. 8(e); the fatigue source zone is much flatter than other regions due to the many extrusions and friction which produce shapes such as semicircles or semi-ellipses.
It can be seen in Fig. 8(c) that there are some stepped radiation lines, which are the fatigue tearing edges and ridge lines existing in the fatigue crack propagation zone; they are the typical characteristics of fatigue cracks. Figure 8(d) displays the microscopic property of the tensile fracture zone, which is the area of specimen fracture; dimples are observed in the zone. When the fatigue damage of specimens reaches a certain extent, the bearing surface becomes smaller and the phenomenon of stress concentration is more obvious, which results in the fracture of specimens.
The fractures of specimens with fatigue degrees of 15, 65 and 90% are compared. When the fatigue degree of a specimen is 15%, the width of the fatigue crack propagation zone is below 200 µm according to the measurement function of SEM, which indicates that the fatigue crack is very small and the nonlinear property of the specimen is very weak. When the fatigue degree increases to 65%, the fatigue crack propagation zone becomes larger and the width of this area is close to 800 µm, which indirectly indicates that fatigue crack initiation and propagation occur in this stage; the relative nonlinear parameter significantly increases in this process. When the fatigue degree of specimens reaches 90%, the width of the fatigue crack propagation zone is greater than 1.1 mm and specimens appear to have obvious macroscopic cracks. Therefore, with the increase in fatigue degree, the width of the fatigue crack propagation zone becomes larger and the nonlinear degree of specimens increases.
The Fatigue Life Prediction of Specimens
Because the relative nonlinear parameters of the difference frequency and sum frequency have an intrinsic relationship with the microstructure evolution of metal materials caused by fatigue damage, that is, the fatigue state of metal materials indirectly determines the ultrasonic nonlinear property, the relative nonlinear parameter can evaluate the fatigue state, which provides a method for quickly and effectively predicting the fatigue life of specimens based on the relative nonlinear parameter.
For specimens p1, p2 and p3, based on the relationship between the relative nonlinear parameter and fatigue degree shown in Fig. 7, the optimal fitting equation of the relative nonlinear parameter at the difference frequency β - and fatigue degree N is
The optimum fitting curve of the relative nonlinear parameter at the sum frequency \( \beta_{ + } \) and fatigue degree N is
An approximate quadratic curve has been found to suit the relationship between the relative nonlinear parameter and fatigue degree based on experimental data. Therefore, the optimal fitting curve can serve as the master curve for fatigue life prediction based on the collinear wave mixing method.
According to the theory of data fusion (Ref 19), a comprehensive feature integrating several characteristics is presented for fatigue life prediction of specimens. Because the relative nonlinear parameters of the difference and sum frequencies reflect the relationship between the ultrasonic nonlinear property and fatigue damage, in order to highlight the relationship between the relative nonlinear parameter and fatigue degree of specimens, it is necessary to combine the relative nonlinear parameters at the difference and sum frequencies for fatigue degree estimation. Because the proportions of the relative nonlinear parameters and sideband amplitudes at the difference and sum frequencies are the same, the combined nonlinear ultrasonic parameter β ∏ is proposed as β ∏=β −+β +.
Based on the experimental data shown in Fig. 7, the combined nonlinear ultrasonic parameter is calculated, and the relationship of the new parameter and fatigue degree is shown in Fig. 9.

Relationship of the combined nonlinear ultrasonic parameter and fatigue degree based on experimental data
If the independent variable is the combined nonlinear ultrasonic parameter, the optimal fitting curve of the combined nonlinear ultrasonic parameter and fatigue degree is
When applying the least squares method to fit the optimal fitting curve of the combined nonlinear ultrasonic parameter and fatigue degree based on experimental data, the fitting coefficient is R 2 = 0.9949, the root-mean-square error is RMSE = 0.02184, and the error sum of squares is SSE = 0.00286, which indicates that the fitting curve could well reflect the relationship between the combined nonlinear ultrasonic parameter and fatigue degree. Therefore, Eq 11 can act as a model to estimate the fatigue degree of specimens with the same specification. Based on the three models of fatigue degree estimation, that is, Eq 9, 10, and 11, for the test samples p6 and p7, the results of fatigue life prediction based on the relative nonlinear parameters β − and β + and the combined nonlinear ultrasonic parameter β Π are shown in Table 2.
As shown in Table 2, when the relative nonlinear parameter at the difference frequency is applied to predict fatigue life, the error is 3.24, 4.98, 3.57 and 6.46%; based on the relative nonlinear parameter at the sum frequency, the largest evaluation error is 10.74% when the theoretical fatigue life is 85%. When the combined nonlinear ultrasonic parameter is used for fatigue life prediction, the error is 2.44, 0.91, 2.94 and 1.21%. Through contrast analysis, the error of fatigue life prediction is relatively higher when using models based on the relative nonlinear parameters at the difference and sum frequencies, while the error is less than 3% using the model of the combined nonlinear ultrasonic parameter. This illustrates that the optimal fitting curve of the combined nonlinear ultrasonic parameter and fatigue degree can act as a model to effectively and quickly evaluate the fatigue life of specimens. The model is an expression fully displaying the dependence of the fatigue damage of specimens and the relative nonlinear parameter of ultrasonic.
Conclusions
In this paper, the combined nonlinear ultrasonic parameter based on the collinear wave mixing technique is applied for fatigue life prediction of metallic materials. The relative nonlinear parameters at the difference and sum frequencies monotonously increase with fatigue degree, which is related to the microstructure evolution of specimens. When the fatigue degree of specimens is below 65%, the relative nonlinear parameter increases quickly, while above 65%, the increase trend of the relative nonlinear parameter becomes slow. The error of fatigue life prediction based on the combined nonlinear ultrasonic parameter is less than 3%, which is below the prediction error based on the relative nonlinear parameters at the difference and sum frequencies.
The model for fatigue life prediction based on the combined nonlinear ultrasonic parameter is constructed based on specimens only in relation to the fatigue degree and does not consider the material and the notch size; therefore, the model is only suitable for specimens with the same specification. Furthermore, the limitation of the number of specimens may influence the prediction result.
References
J. Noda, M. Nakada, and Y. Miyano, Fatigue Life Prediction under Variable Cyclic Loading Based on Statistical Linear Cumulative Damage Rule for CFRP Laminates, J. Reinf. Plast. Compos., 2007, 26(7), p 665–680
F. Kubo, A. Okabe, and N. Tomioka, A Method for Calculating Nominal Structural Stress of Spot-Welded Structure: The Spot Welding Near the Flange Edge, Transactions of the Society of Automotive Engineers of Japan, 2008, 39, p 81–86
H. Nie, Biaxial Stress Fatigue Life Prediction by the Local Strain Method, Int. J. Fatigue, 1997, 19(6), p 517–522
D. Guan, W. Yi, and L. Li, Fatigue Strength Prediction For Misaligned Welded Joints by Stress Field Intensity Method. Adv. Steel Struct. 2002, p 1009–1016
O. Buck, W.L. Morris, and J.M. Richardson, Acoustic Harmonic Generation at Un-bonded Interfaces and Fatigue Cracks, Appl. Phys. Lett., 1978, 33(5), p 371–373
W.L. Morris, Acoustic Harmonic Generation Due to Fatigue Damage in High-Strength Aluminum, J. Appl. Phys., 1979, 50(11), p 6737–6741
A.A. Shah, Y. Ribakov, and C. Zhang, Efficiency and Sensitivity of Linear and Non-linear Ultrasonics to Identifying Micro and Macro-Scale Defects in Concrete, Mater. Des., 2013, 50, p 905–916
J. Kim, L.J. Jacobs, and J.M. Qu, Experimental Characterization of Fatigue Damage in a Nickel-Base Superalloy Using Nonlinear Ultrasonic Waves, J. Acoust. Soc. Am., 2006, 3(120), p 1266–1273
J. Kim, V.A. Yakovlev, and S.I. Rokhlin, Parametric Modulation Mechanism of Surface Acoustic Wave on a Partially Closed Crack, Appl. Phys. Lett., 2003, 82(19), p 3203–3205
M.H. Liu, G.X. Tang, L.J. Jacobs, and J.M. Qu, Measuring Acoustic Nonlinearity Parameter Using Collinear Wave Mixing, J. Appl. Phys., 2012, 112(2), p 24
D. Donskoy, A. Sutin, and A. Ekimov, Nonlinear Acoustic Interaction on Contact Interfaces and Its Use for Nondestructive Testing, NDT E Int., 2001, 34, p 231–238
Z.Y. Zhang, P.B. Nagy, and W. Hassan, Analytical and Numerical Modeling of Non-collinear Shear Wave Mixing at an Imperfect Interface, Ultrasonics, 2016, 65, p 165–176
J.P. Jiao, J.J. Sun, G.H. Li, B. Wu, and C.F. He, Evaluation of the Inter-Granular Corrosion in Austenitic Stainless Steel Using Collinear Wave Mixing Method, NDT E Int., 2015, 69, p 1–8
N. Li, J.J. Sun, J.P. Jiao, and J.P. Jiao, Quantitative Evaluation of Micro-Cracks Using Nonlinear Ultrasonic Modulation Method, NDT E Int., 2016, 79, p 63–72
Y. Murakami, M.S. Ferdous, and C. Makabe, Low Cycle Fatigue Damage and Critical Crack Length Affecting Loss of Fracture Ductility, Int. J. Fatigue, 2016, 82, p 89–97
J. Kim, A. Baltazar, J.W. Hu, and S.T. Rokhlin, Hysteretic Linear and Nonlinear Acoustic Responses From Pressed Interfaces, Int. J. Solids Struct., 2006, 43(21), p 6436–6452
K. Jhang and K. Kim, Evaluation of Material Degradation Using Nonlinear Acoustic Effect, Ultrasonics, 1999, 37(1), p 39–44
B. Wu, B.S. Yan, and C.F. He, Nonlinear Ultrasonic Characterizing Online Fatigue Damage and In Situ Microscopic Observation, Trans. Nonferrous Metals Soc. China, 2011, 21(12), p 2597–2604
X.E. Gros, J. Bousigue, and K. Takahashi, NDT data fusion at pixel level, NDT E Int., 1999, 32, p 283–292
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant Number 51365006) and the manufacturing system and advanced manufacturing technology of Guangxi key laboratory project (Contact Number 14-045-15S05).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, Y., Li, X., Wu, Z. et al. Fatigue Life Prediction of Metallic Materials Based on the Combined Nonlinear Ultrasonic Parameter. J. of Materi Eng and Perform 26, 3648–3656 (2017). https://doi.org/10.1007/s11665-017-2811-7
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11665-017-2811-7