
Abstract
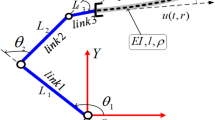
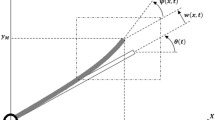
The issue of output constraints is studied for a flexible-link manipulator in the presence of unknown spatially distributed disturbances. The manipulator can be taken as an Euler-Bernoulli beam and its dynamic is expressed by partial differential equations. On account of the uncertainty of disturbances, we present a disturbance observer to estimate infinite dimensional disturbances on the beam. The observer is proven exponentially stable. Considering the problem of output constraints in the practical engineering, we propose a novel distributed vibration controller based on the disturbance observer to fulfill the position regulation of the joint angle and suppress elastic deflections on the flexible link, while confining the regulating errors of output in a suitable scope that we can assign. The closed-loop system is demonstrated exponentially stable based on an integral-barrier Lyapunov function. Simulations validate the effectiveness of the design scheme.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Zhang L, Liu J. Adaptive boundary control for flexible two-link manipulator based on partial differential equation dynamic model. IET Control Theor Appl, 2013, 7: 43–51
Lee H H, Prevost J. A coupled sliding-surface approach for the trajectory control of a flexible-link robot based on a distributed dynamic model. Int J Control, 2005, 78: 629–637
Sohn J W, Han Y M, Choi S B, et al. Vibration and position tracking control of a flexible beam using SMA wire actuators. J Vib Control, 2009, 15: 263–281
He W, Meng T, Huang D, et al. Adaptive boundary iterative learning control for an Euler-Bernoulli beam system with input constraint. IEEE Trans Neural Netw Learning Syst, 2018, 29: 1539–1549
Han Z J, Xu G Q. Exponential stabilisation of a simple tree-shaped network of Timoshenko beams system. Int J Control, 2010, 83: 1485–1503
Han Z J, Xu G Q. Exponential stability of Timoshenko beam system with delay terms in boundary feedbacks. ESAIM-COCV, 2011, 17: 552–574
He W, He X, Zou M, et al. PDE model-based boundary control design for a flexible robotic manipulator with input backlash. IEEE Trans Contr Syst Technol, 2018, 1–8
Ge S S, Zhang S, He W. Vibration control of an Euler-Bernoulli beam under unknown spatiotemporally varying disturbance. Int J Control, 2011, 84: 947–960
Khot S, Yelve N P, Tomar R, et al. Active vibration control of cantilever beam by using PID based output feedback controller. J Vib Control, 2012, 18: 366–372
Guo B Z, Jin F F. The active disturbance rejection and sliding mode control approach to the stabilization of the Euler-Bernoulli beam equation with boundary input disturbance. Automatica, 2013, 49: 2911–2918
He W, Meng T, Zhang S, et al. Trajectory tracking control for the flexible wings of a micro aerial vehicle. IEEE Trans Syst Man Cybern Syst, 2018, 99: 1–11
Paranjape A A, Guan J, Chung S J, et al. PDE boundary control for flexible articulated wings on a robotic aircraft. IEEE Trans Robot, 2013, 29: 625–640
Jiang T, Liu J, He W. Boundary control for a flexible manipulator with a robust state observer. J Vib Control, 2016, 24: 260–271
Zhang S, He W, Huang D. Active vibration control for a flexible string system with input backlash. IET Control Theor Appl, 2016, 10: 800–805
Liu Z, Liu J, He W. Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint. Automatica, 2017, 77: 302–310
He W, Ouyang Y, Hong J. Vibration control of a flexible robotic manipulator in the presence of input deadzone. IEEE Trans Ind Inf, 2017, 13: 48–59
He W, Zhang S. Control design for nonlinear flexible wings of a robotic aircraft. IEEE Trans Contr Syst Technol, 2017, 25: 351–357
Park S K, Lee S H. Disturbance observer based robust control for industrial robots with flexible joints. In: 2007 International Conference on Control, Automation and Systems. Seoul, 2007. 584–589
Nikoobin A, Haghighi R. Lyapunov-based nonlinear disturbance observer for serial n-link robot manipulators. J Intell Robot Syst, 2009, 55: 135–153
Yun J N, Su J B. Design of a disturbance observer for a two-link manipulator with flexible joints. IEEE Trans Contr Syst Technol, 2014, 22: 809–815
Zheng G, Efimov D, Bejarano F J, et al. Interval observer for a class of uncertain nonlinear singular systems. Automatica, 2016, 71: 159–168
Chen M, Ge S S. Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans Cybern, 2013, 43: 1213–1225
Mohammadi A, Tavakoli M, Marquez H J, et al. Nonlinear disturbance observer design for robotic manipulators. Control Eng Practice, 2013, 21: 253–267
Tee K P, Ren B, Ge S S. Control of nonlinear systems with timevarying output constraints. Automatica, 2011, 47: 2511–2516
He W, Ge S S. Vibration control of a flexible beam with output constraint. IEEE Trans Ind Electron, 2015, 62: 5023–5030
Ge S S, Lee T H, Gong J Q. A robust distributed controller of a singlelink SCARA/Cartesian smart materials robot. Mechatronics, 1999, 9: 65–93
D’Andrea R, Dullerud G E. Distributed control design for spatially interconnected systems. IEEE Trans Automat Contr, 2003, 48: 1478–1495
Wu F. Distributed control for interconnected linear parameter-dependent systems. IEE Proc-Control Theor Appl, 2003, 150: 518–527
Yang H, Liu J, Lan X. Observer design for a flexible-link manipulator with PDE model. J Sound Vib, 2015, 341: 237–245
Yang H, Liu J. Distributed piezoelectric vibration control for a flexible-link manipulator based on an observer in the form of partial differential equations. J Sound Vib, 2016, 363: 77–96
Author information
Authors and Affiliations
Corresponding author
Supporting Information
Rights and permissions
About this article

Cite this article
Yang, H., Liu, J. & He, W. Distributed disturbance-observer-based vibration control for a flexible-link manipulator with output constraints. Sci. China Technol. Sci. 61, 1528–1536 (2018). https://doi.org/10.1007/s11431-017-9280-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-017-9280-1