
Abstract
A key advantage of Mobile Adhoc Networks is the mobility offered to the users. But the mobility is unpredictable and may cause routes to break frequently. The frequent breaks in routes adversely affect Quality of Service requirement of applications in the mobile wireless networks and thus pose a challenge. In this paper, we have proposed a method for signal strength based link availability prediction to be used in AODV routing. The nodes estimate the link breakage time and further warns the other nodes about the link breaks in the route. Based on this information, either local route repair or new route discovery is initiated much earlier than the route breakage. This reduces the data packet losses as well as end-to-end delay. The proposed approach is compared with AODV without link prediction. The results show that there is significant reduction in packet drops and average end-to-end delay. There is also an improvement in data packet delivery ratio for AODV with link prediction. Proposed approach results in improvement in the Quality of Service.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A mobile adhoc network is a collection of mobile wireless devices which forms a network without any infrastructure. In such an environment, each mobile node acts both as a host as well as a router. Due to the limited transmission range of wireless interfaces, the data traffic has to be sent to the destination over multiple hops through intermediate nodes. These networks are also called multi-hop adhoc wireless networks. In general, in mobile adhoc network, the nodes are free to move randomly and reorganize themselves frequently. Thus, the network’s topology keeps on changing rapidly and unpredictably.
Adhoc wireless routing protocols can be categorized into three different classes [1, 2] viz. proactive, reactive and hybrid routing protocols. Proactive protocols maintain all the routing information to reach each mobile node in the network, at all the nodes. These are also known as the table driven protocols. Destination Sequence Distance Vector routing protocol is an example of the proactive class. Reactive protocol such as AODV searches for the route (or sometimes alternative routes) only to the destination when they are needed. In general, while sending packets to the destination, the mobile nodes also try to discover other new mobile nodes as well as alternative paths from the source to the destination. Hybrid protocols combine the features of both the reactive and the proactive routing protocols. Zone routing protocol belongs to this class.
Routing presents a challenge in MANET because mobility of nodes will cause frequent link breaks and hence frequent changes in topology due to mobility, leading to frequent route change. Thus QoS provisioning for application becomes a challenge [3]. When a link break occurs, the path has to be repaired (local recovery) or a new path has to be discovered. During alternate route discovery after link break, packets will be dropped. This leads to wastage of the scarce node resources such as battery power.
In this paper, an interpolation based approach has been proposed to predict the duration of availability of the current route. This approach aims to improve the Quality of Service (QoS) by predicting a link failure before its occurrence and routing the data packets through an alternate path, while nodes are moving around dynamically in the Mobile Adhoc Network. Availability of route is determined by availability of links between the nodes forming the route. Therefore, to estimate future availability of route, it is important to predict the availability of these links. We propose to use Newton divided difference interpolation for link prediction to estimate the availability of active link to the neighboring nodes. Based on this information, when link failure is expected between two nodes, proactively an alternate path is build up even before the link breaks. This reduces the data packet drops and hence the recovery time.
The paper has been organized in five sections. Section 2 introduces some related work in this domain. Section 3 discusses the details of proposed link prediction to estimate the link availability. Simulation results are presented in the Sect. 4. Section 5 summarizes the work.
2 Related Work
T. Goff and N. Abu-Ghazaleh et al. [4] have proposed a pre-emptive route maintenance extension to on-demand routing protocol. The received transmission power is used to estimate when the link is expected to break. Shengming Jiang, Dajiang He and Jianqiang Rao [5] have proposed a prediction based link availability estimation model for MANET. This model predicts the probability of breakup an active link between two nodes based on the node movement. It uses exponential distribution for prediction of link availability. Liang Qin and Thomas Kunz [6] presented a method to increase packet delivery ratio in DSR. They have used the model for link prediction based on received signal strength, which is the function of distance between two nodes. A link between two nodes is available as long as the distance between the two nodes is smaller than the transmission range or the received signal strength is above a threshold. Min Quin, Roger Zimmer and Leslie S. Liu [7] proposed a model for predicting the link availability between mobile nodes to support multimedia streaming. They had also presented a mathematical framework for the link prediction.
Sofiane Boukli Hacene, Ahmed Lehireche and Ahmed Meddahi [8] have proposed predictive preemptive AODV (PPAODV), which predicts the link failure using the received signal strength (RSS). This prediction method uses Lagrange interpolation, which approximates the RSS by means of a function with past RSS information. PPAODV discovers a new route before the active route breaks and changes the route smoothly by predicting a RSS of data packets at the predict time t, from the past information of RSS. PPAODV also includes discovery period (TDP) in the predicted time.
S. Crisostomo, S. Sargento, P. Brandao and R. Prior [9] have presented a proposal for link expiration time computation using GPS (Global Positioning system) equipped receiver. Though, no results and analysis were presented. It uses location and mobility information of the neighbors including longitude, latitude etc. propagated through Hello messages. P. Mani and D. W. Petr [10] have used a method for the calculation of velocity and thus link break time computation based on distance and velocity. The simulation results and analysis show that there is improvement in the end-to-end delay. For CBR traffic, there is reduction in packet delivery ratio using this model as compared to AODV. For TCP traffic, this does not give significant benefit in throughput over AODV.
Prashant Singh and D. K. Lobiyal [11] have proposed a prediction based link availability estimation model for MANET. This model predicts the probability of breakup an active link between two nodes based on the node movement. It uses pareto distribution for prediction of link availability to represent the pdf of epoch length. Epoch length is defined as the length of interval for which a node moves in a constant direction at a constant speed. They have used Pareto distribution with the assumption that small epoch length will occur more frequently and larger epoch length will occur less frequent.
3 Link Prediction
In traditional mobile and wired-network routing algorithms, a change of path happens when a link along the path fails or another shorter path is found. A link failure is costly because multiple retransmission timeouts are required to detect the failure and after that a new path has to be found, leading to delay in restoration. Since paths fail so infrequently in wired networks, this is not an important issue. However, as routing protocols in mobile networks follow this model despite the significantly higher frequency of path disconnections that occur, QoS of route does get affected.
In this section, we propose a link prediction algorithm to predict the time after which an active link will break. This is done by estimating the time at which received signal strength of the data packets will fall below a threshold power. The received power level below the threshold indicates that the two nodes are moving away from each other’s radio transmission range. The prediction of link break warns the source before the path breaks and the source can rediscover a new path in advance.
In this approach, three consecutive measurements of signal strength of packets received from the predecessor node are used to predict the link failure using the Newton divided difference method [12]. The Newton interpolation polynomial has the following generalized expression.
The received signal strengths of the three latest data packets and their time of occurrence are maintained by each receiver for each transmitter from which it is receiving. Using three received data packets’ signal power strengths as P 1, P 2, P 3 and the time when packets arrived as t 1, t 2, t 3 instants respectively and P r as the threshold signal strength to be operative at the time\( t_{p} \), one can predict \( t_{p} \). We assume that at the predicted time \( t_{p} \), when received power level reduces to threshold power, the link will break. The threshold signal strength \( P_{r} \), is the minimum power receivable by the device. This is the power at the maximum transmission range. For example, WaveLAN cards have maximum transmission range of 250 meters in open environments in the 900 MHz band. The value of the threshold signal strength P r is 3.65 × 10−10 Watts (e.g. characteristic of the WaveLAN card) [4]. The expected signal strength of the packets received can be computed as below, where Δ and Δ2 are first and second divided differences respectively.
Let
The Eq. (2) becomes
Rearranging Eq. (5),
This is of the form
where a = B,b = (A − Bt 1 − Bt 2 ) andc = (P 1 − P r − At 1 + t 1 t 2 B).Therefore, the predicted time t p at which link will fail is
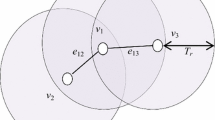
Routing protocol needs a time to setup a new or alternate path, a time parameter, critical time \( t_{s} \) is introduced. \( t_{s} \) should be sufficient enough to send error message to upstream node and source of the packet and source to fine a new route and \( t_{s} \) is just smaller time than link break time \( t_{p} \). After time \( t_{s} \) , the node enters into critical state and node should find an alternate route. When a link is expected to fail between nodes, the upstream node first attempts to find a route to the destination. If such route is not found within a fixed time called discovery period, a link failure warning is sent towards the sources whose flows are using this link. Source nodes can invoke the route discovery mechanism to setup restoration paths. At time \( t_{s} \), the received power is sufficient for sending warning message to the upstream node and discovering an alternate path either by local route repair around the link which is going to break or by setting up new paths from sources. As two nodes move outwards, signal power of the nodes drops. Thus we define link break when nodes are first crossing the radio transmission range and broken links are repaired locally in k hops. The value of k is two, i.e. broken links can be repaired in two hops. The proposed local route repair procedure attempts to repair broken route locally with minimum control overheads for faster recovery.
Each time a data packet is received, the receiving node monitors the link with the following algorithm:

4 Simulation Results and Analysis
We have simulated AODV routing algorithm without (AODV) and with (AODVLP) link prediction to determine performance gain if any. NS-2 [13] has been used for this purpose. At the MAC layer, IEEE 802.11 protocol is used for simulation. Random waypoint model is used for representing nodes’ mobility. Numerous simulations were run with same parameters and average of observed values was taken to reduce the estimation error. Two parameters viz. number of nodes and mobility pattern were varied in the Sects. 4.1 and 4.3. The detailed simulation parameters are summarized in Table 1.
The performance of the model is evaluated in terms of number of route failures, packet delivery ratio and average end-to-end delay as a function of number of nodes and node mobility. The number of nodes was varied from 25 to 125 and node velocity from 5 to 30 m/s. At a time, one variable was changed and other two were kept constant. The two parameters which are kept fixed, are assumed to take values as follows—network size = 50 nodes, node velocity = 5 m/s and pause time = 10 s.
The sources assumed are Constant bit rate (CBR) in the sections the 4.1 and 4.2 and TCP in the Sect. 4.3. The packet generation rate is taken as 4 packets/s in the simulations.
Packet delivery ratio is the ratio of the data packets delivered to the destination to those generated by either CBR or TCP sources. The higher the value better is the performance.
Average end-to-end delay of data packets includes all possible delays caused by buffering during route discovery, queuing at interface queue, retransmission delays at MAC layer, propagation and transfer time.
Number of route failures is the number of routes which failed to carry the data during simulation.

Local route repair
4.1 CBR Simulations
The simulation results are obtained for AODV and AODVLP with CBR sources. The network size is varied and other simulation variables are kept constant with pause time as 10 s and velocity as 5 m/s in Figs. 2, 3, 4 and 5. Figure 2 shows variation of route failures with increasing network size. Results show that route failures are much less in AODVLP compared to AODV. It happens because in AODVLP, alternative routes are discovered in advance before a link failure, and messages are delivered through alternative route. However, AODVLP and AODV both give more route failures with increase in node density because the need of more routes to destinations.

Route failures versus nodes

Packet delivery ratio versus nodes

Average RTS collisions per node versus nodes

End-to-end delay versus nodes
Figure 3 shows variation of packet delivery ratio with increasing network size. Results show that packet delivery ratio is better in AODVLP as compared to AODV. It happens because in AODVLP, alternative routes are discovered before the route failures, and more data is successfully delivered to the destination. However, AODVLP and AODV give smaller delivery ratio as network size increases, since it has more route failures as shown in Fig. 2 which results in packet drops. Increased node density causes more contentions and collisions due to more neighboring nodes in the vicinity. Increase in average RTS collisions per node are observed, as shown in Fig. 4. Due to more collisions, the delivery ratio decreases by retransmitting the packets more than once.
The end-to-end delay is an average of difference between the time a data packet is generated by an application and the time the data packet is received at its destination. Figure 5 shows decrease in end-to-end delay in AODVLP as compared to AODV due to advance route discovery in case of route failures. However, end-to-end delay increases with increase in the network size in AODVLP and AODV because high node density increases collisions, as shown in Fig. 4, which results in retransmission of packets.
The velocity is varied in discrete steps as 5, 10, 15, 20, 25 and 30 m/s for a fixed network size of 50 nodes and pause time of 10 s in Figs. 6, 7, 8 and 9. Figure 6 shows variation of route failures with increasing node velocity. From these results, it is quite evident that AODVLP gives fewer route failures than AODV because link prediction model helps in discovering the alternative routes in advance before a link failure, and messages are delivered through the alternative routes. However, for AODVLP and AODV, route failures increase with increase in node velocity. With fast mobility, more links and thus more routes break.

Route failures versus node velocity

Packet delivery ratio versus node velocity

Average RTS collisions per node versus node velocity

End-to-end delay versus node velocity
Figure 7 shows variation of packet delivery ratio with increasing node velocity. Results show that packet delivery ratio is better in AODVLP as compared to AODV. It happens because in AODVLP, alternative routes are discovered before the route failures, and more data is successfully delivered to the destination. The result also shows that the packet delivery ratio decreases as the node velocity increases because faster mobility of nodes causes more route failures as shown in Fig. 6. Further, more route failures result in packet drops and thus low packet delivery ratio.
Figure 9 shows increase in end-to-end delay with increase in node velocity. The results show that AODVLP outperforms AODV significantly with increase in node velocity. We observe that the end-to-end delay increases when node velocity increases. The result shows that by increasing the velocity of nodes, delay increases because more route failures occur for fast moving nodes. Therefore, overheads of new route discovery lead to increase of the end-to-end delay.
4.2 Energy Simulations
In this section, we have explained simulation parameters and the simulation results for the study of energy consumption of AODV and AODVLP schemes. We have compared throughput, energy consumption per successful transmission of AODVLP and AODV schemes. We have observed their performance behavior by varying network load and the node density within a given area. Network load is the rate of generation of packets in the network and throughput is calculated as number of kilobytes data received by the destination node per second.
The packet generation rate is varied for a fixed network size of 50 nodes, velocity of 5 meters/second and pause time of 10 s in Figs. 10 and 11. The simulation results are obtained for AODV and AODVLP. Figure 10 shows the comparison of the throughput of AODV and AODVLP. It shows that AODVLP achieves higher throughput compared to AODV. It happens because in AODVLP, alternative routes are discovered in advance before a link failure, and delivers a message through alternative route. However, AODV and AODVLP give increasing throughput as packet generation rate increases and saturate by remaining constant after a particular point. As at low packet generation rate, less number of packets would be contending for the transmission and at higher network loads, more data can be delivered per second, therefore throughput increases linearly and saturates thereafter.

Successfully data transmission rate versus traffic generated rate

Average energy consumption (in Joules) per communication of 1Kbyte of data versus traffic generated rate
Figure 11 shows variation of energy consumed per successful communication of 1 kilobyte of data with increasing packet generation rate. Results show that power consumption per successful communication of 1 kilobyte of data is lesser in AODVLP as compared to AODV. It happens because in AODVLP link successes are observed to avoid packet drops and thus, avoiding retransmissions of packets. However, AODV and AODVLP give increasing average energy consumption as network load increases, since more packets are generated in the network and thus these packets are send to the destinations therefore, more energy is consumed in successful communication of these packets.
The density of the nodes is varied and other simulation variables are kept constant with pause time as 10 s and velocity as 5 m/s in Figs. 12 and 13. Figure 14 shows that in AODV and AODVLP, the throughput per node is decreasing with increase in number of nodes because increase in node density increases collisions and contention. At very low density, the AODV and AODVLP give throughput per node is more because contention and collisions are lesser. At higher node density, contention and collisions are more leading to lesser throughput per node.

Throughput per node versus nodes

Energy consumption per communication of 1 kilobyte data versus nodes

Packet delivery ratio versus nodes
Figure 13 shows AODVLP consumes lesser energy as compared to AODV and therefore more packets can be transmitted in lesser energy. The energy consumption increases in case of both the schemes as the node density increases. Increased node density causes more contentions and collisions. But the energy consumption of the AODVLP is lower throughout the density variation thereby making it the scheme, which consumes lesser energy.
4.3 TCP Simulations
The simulation results are obtained for AODV and AODVLP with TCP sources. The performance metrics are packet delivery ratio and end-to-end delay. As seen from Figs. 14 and 15, AODVLP offers better end-to-end delay performance than AODV and comparable packet delivery ratio in both AODVLP and AODV. The network size is varied with fixed pause time as 10 s and velocity as 5 m/s in Figs. 14 and 15.

End-to-end delay versus nodes
From Figs. 14 and 15, it can be seen that AODVLP offers slightly better end-to-end delay performance than AODV and both have nearly identical packet delivery ratio with increased node density. The packet delivery ratio in AODV and AODVLP are comparable and remains low, as shown in Fig. 14 because of feedback property of TCP, which deceases the rate of packet generation with increasing estimated round-trip time and vice versa (rate limiting property of TCP). However, packet delivery ratio increases slightly in both AODVLP and AODV as node density increases. This happens because packet delivery ratio is relatively low, with TCP as compared with CBR traffic in both AODV and AODVLP with increased node density.
Figure 15 shows decrease in end-to-end delay in AODVLP as compared to AODV due to advance route discovery in case of route failures. However, end-to-end delay increases with increase in the network size in AODVLP and AODV because high node density increases contention and collisions, which results in retransmission of packets. As the number of nodes increases in the vicinity, increases the contention in the wireless physical channel because the simulation model uses only a single channel (frequency) for communication between nodes. This in turn increases the probability of collision of the control (RTS/CTS/ACK) packets at the MAC 802.11 (CSMA/CA) layer. The collisions require the transmitting nodes to perform an exponential back-off, which greatly reduces link utilization and effective bandwidth. Hence, in such highly inter-connected networks, the end-to-end delay performance degrades with increase in node density.
The velocity is varied as 5, 10, 15, 20, 25 and 30 m/s for a fixed network size of 50 nodes and pause time of 10 s in Figs. 16 and 17. Figure 16 shows variation of packet delivery ratio with increasing node velocity. Results show that packet delivery ratio is better and comparable in AODVLP as compared to AODV. It happens because in AODVLP, alternative routes are discovered before the route failures and more data is successfully delivered to the destination and packet delivery ratio remains low in AODVLP and AODV both due to feedback property in TCP. The result also shows that the packet delivery ratio decreases as the node velocity increases because faster mobility of nodes causes more route failures. Further, more route failures result in packet drops and thus low packet delivery ratio.

Packet delivery ratio versus node velocity

End-to-end delay versus node velocity
Figure 17 shows increase in end-to-end delay with increase in node velocity. The results show that AODVLP outperforms AODV significantly with increase in node velocity. We observe that the end-to-end delay increases when node velocity increases. The result shows that by increasing the velocity of nodes, delay increases because more route failures occur for fast moving nodes. Therefore, overheads of new route discovery lead to increase of the end-to-end delay. This shows that the method proposed for anticipating link breaks can result in overall substantial performance gain.
5 Conclusion and Future Work
In this paper, we have proposed AODV routing protocol with link prediction for adhoc networks. A prediction function that predicts link breaks based on signal strength of the three consecutive received packets and a threshold signal strength, has been presented. The AODV can thus proactively initiate repair earlier than the failure.
The performance of the proposed AODV with link prediction has been evaluated and compared with AODV using simulations. The simulation results show that the proposed algorithm performs well and results in lower end-to-end delay and higher packet delivery ratio due to local and proactive repair processes, and therefore leading to improvement of the Quality-of-Service.
AODVLP can be further improved by limiting overhead of unnecessary control messages. The suitability of AODVLP for real-time traffic needs to be further studied by testing it with smaller sized CBR packets at a higher packet generation rates. The performance of other routing algorithm can also be evaluated by incorporating link prediction. It is also possible to investigate for better link prediction methods.
References
IETF Working Group MANET. http://www.ietf.org/html.charters/manet-charter.html.
Perkins, C., Belding-Royer, E., & Das, S. R. (2003). Ad hoc on-demand distance vector (AODV) routing. RFC3561, IETF MANET Working Group.
Wu, D., & Negi, R. (2003). Effective capacity: A wireless link model for support of quality of service. IEEE Transactions on Wireless Communications, 2(4), 630–643.
Goff, T., Abu-Ghazaleh, N., Pathak, D., & Kahvecioglu, R. (2001). Preemptive routing in ad hoc networks. In Proceedings of the seventh annual international conference on mobile computing and networking, Rome, Italy (pp. 43–52).
Jiang, S. M., He, D. J., & Rao, J. Q. (2001). A prediction based link availability estimation for mobile ad-hoc networks. In Proceedings of IEEE Infocom, Alaska, USA (pp. 1745–1752).
Liang Qin, L., & Kunz, T. (2003). Increasing packet delivery ratio in dsr by link prediction. In Proceedings of the 36th Hawaii international conference on system sciences (HICS ‘03) (pp. 300–309).
Quin, M., Zimmermann, R., & Liu, L. S. (2005). Supporting multimedia streaming between mobile peers with link availability prediction. In ACM multimedia conference, Singapore (pp. 956–965).
Hacene, S. B., et al. (2006). Predictive preemptive ad hoc on-demand distance vector routing. Malaysian Journal of Computer Science, 19(2), 189–195.
Crisostomo, S., Sargento, S., Brandao, P., & Prior, R. (2004). Improving AODV with preemptive local route repair. In International workshop on wireless ad hoc network.
Mani, P., & Petr, D. W. (2004). Development and performance characterization of enhanced AODV routing for CBR and TCP traffic. In Wireless telecommunications symposium.
Singh, P., & Lobiyal, D. K. (2010). DSR with link prediction using Pareto distribution. In IEEE international conference on networking and information technology 2010 (pp. 29–33).
Sastry, S. S. (2005). Introductory methods of numerical analysis (4th ed.). New Delhi: Prentice-Hall of India.
The Network Simulator—ns2. http://www.isi.edu/nsnam/ns/.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yadav, A., Singh, Y.N. & Singh, R.R. Improving Routing Performance in AODV with Link Prediction in Mobile Adhoc Networks. Wireless Pers Commun 83, 603–618 (2015). https://doi.org/10.1007/s11277-015-2411-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11277-015-2411-5