
Abstract
Maximum likelihood through the EM algorithm is widely used to estimate the parameters in hidden structure models such as Gaussian mixture models. But the EM algorithm has well-documented drawbacks: its solution could be highly dependent from its initial position and it may fail as a result of degeneracies. We stress the practical dangers of theses limitations and how carefully they should be dealt with. Our main conclusion is that no method enables to address them satisfactory in all situations. But improvements are introduced, first, using a penalized log-likelihood of Gaussian mixture models in a Bayesian regularization perspective and, second, choosing the best among several relevant initialisation strategies. In this perspective, we also propose new recursive initialization strategies which prove helpful. They are compared with standard initialization procedures through numerical experiments and their effects on model selection criteria are analyzed.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The EM algorithm (Dempster et al. 1977) is one of the most used algorithms in statistics (40,240 citations in Google Scholar, early February 2015). It is concerned with models with missing data structure, and mixture models are certainly the favorite domain of application of the EM algorithm (see McLachlan and Peel 2000). Often the presence of missing data makes maximum likelihood (ml) inference difficult. The idea of the EM algorithm is to maximize at each iteration the conditional expectation of the complete data log-likelihood of the model at hand to derive the ml estimator of its parameter. The context is as follows: the observed data \({\mathbf {y}}=(y_1,\ldots ,y_n)\) are assumed to arise from the probability distribution \(f(.;\theta )\), \(\theta \) being the model parameter. The complete data are \({\mathbf {x}}= (x_1,\ldots ,x_n)\) with \((x_i=(y_i, z_i)\), for \(i=1,\ldots , n)\), the \(z_i\)s being missing. The density of a complete observation \(x=(y,z)\) is \(g(x;\theta )\) and the two densities \(f\) and \(g\) are linked by the relation
Denoting \(L_c (\theta ) = \prod _i g(x_i; \theta )\) the complete likelihood, the two steps of the EM algorithm when \(\theta ^r\) is the current parameter are
-
E step Compute \(Q(\theta ,\theta ^r)=E_{\theta ^r}[ \log L_c(\theta ) | \mathbf{y}]\).
-
M step \(\theta ^{r+1}=\arg \max _\theta Q(\theta ,\theta ^r)\).
The advantages and drawbacks of EM are well documented (see for instance McLachlan and Krishnan 2008). Its advantages are that (i) the likelihood \(L(\theta )=\prod _i f(y_i;\theta )\) is increasing at each iteration, (ii) the E and M steps lead generally to closed form and simple formulas easy to program. Its main drawbacks are that (i) EM may converge painfully slowly, (ii) its solutions may be highly dependent on its initial position \(\theta ^0\). Its advantages made it the most popular algorithm to estimate missing structure models and many extensions have been proposed to answer its drawbacks (see for instance Chapters 5 and 6 in McLachlan and Krishnan 2008).
This article is focused on the possible influence of the EM algorithm initialization for the estimation and the selection of a mixture model. To be specific, we restrict our presentation to Gaussian mixture models. But all our considerations are expected to be relevant for all latent structure models for which the EM algorithm encounters many local maxima, slow convergence situations, or degeneracies.
In a Gaussian mixture model, the observed data \(({\mathbf {y}}=y_1,\ldots ,y_n)\), \(y_i \in {\mathbb {R}}^d\) are assumed to arise from the density
where \(p_k \ge 0\) for \(k=1,\ldots ,K\) with \(\sum _{k=1}^K p_k =1\) are the mixing proportions, and where \(\varPhi (.;\mu , \varSigma )\) is the density of a Gaussian distribution with mean \(\mu \) and covariance matrix \(\varSigma \). The vector parameter of the mixture model is denoted \(\theta =(p_1, \ldots , p_{K-1}, \mu _1,\ldots , \mu _K, \varSigma _1,\ldots ,\varSigma _K)\). The missing data are the labels \(z_i\) from which \(y_i\) arises for \(i=1,\ldots ,n\). These labels are binary indicator vectors in \(\{0,1\}^K\): \(z_{ik}=1\) if \(y_i\) arises from the \(k\)th component, otherwise \(z_{ik}=0\). The EM algorithm for this model consists of
-
E step For \(i=1,\ldots ,n\), \(k=1,\ldots ,K\) compute the current conditional probabilities that \(y_i\) arises from the Gaussian distribution \(\phi (y_i; \mu _k^r, \varSigma _k^r)\)
$$\begin{aligned} \tau _{ik}^r=\frac{p_k^r \phi \left( y_i;\mu _k^r,\varSigma _k^r\right) }{\sum _{\ell =1}^Kp_\ell ^r \phi \left( y_i;\mu _\ell ^r,\varSigma _\ell ^r\right) }\cdot \end{aligned}$$ -
M step For \(k = 1, \ldots , K\)
$$\begin{aligned} p_k^{r+1}= & {} \frac{\sum _{i=1}^n \tau _{ik}^r}{n}\\ \mu _k^{r+1}= & {} \frac{\sum _{i=1}^n \tau _{ik}^r y_i}{\sum _{i=1}^n \tau _{ik}^r}\\ \varSigma _k^{r+1}= & {} \frac{\sum _{i=1}^n \tau _{ik}^r \left( y_i -\mu _k^{r+1}\right) \left( y_i -\mu _k^{r+1}\right) '}{\sum _{i=1}^n \tau _{ik}^r}\cdot \end{aligned}$$
Remark
We gave the EM formulas for the most general multivariate Gaussian mixture model with no restrictive assumptions on the mixing proportions or the component covariance matrices. More parsimonious models could be assumed, based on the eigenvalue decomposition of the component covariance matrices (see Banfield and Raftery 1993). Detailed formulas for EM with fourteen different models are in Celeux and Govaert (1995). Note that for some covariance matrix decompositions the M step is no more closed form and requires a numerical optimization.
When using the EM algorithm, there is no guarantee that it provides the ml estimate of the model at hand since its solution depends on its initial position. Moreover, mixture ml estimation can be jeopardized with degeneracies. It can blur statistical inference for estimation and also for model selection. As a matter of fact, selecting a proper mixture model is an important and difficult problem. In particular, the choice of the number of components in a mixture model is quite influential. This choice depends on the purpose of the modeling, but it also depends on the quality of the assessed ml solutions. Actually, most model selection criteria and procedures are based on the likelihood of the consistent ml estimators. Using poor ml estimates at some place can lead to a misleading choice of mixture model.
All the traps of the EM algorithms (high dependence on starting values, slow convergence, convergence towards insensible or spurious maxima) arise more often for complex models. In particular, EM is jeopardized with mixture models with a great number of components or in high dimension settings or when many local maxima of the likelihood function are present. In such situations, this algorithm should be used with a great care to provide relevant and stable parameter estimates.
The aim of this article is to propose relevant procedures to get honest ml estimates derived with the EM algorithm. This is by the way a necessary condition to get a relevant assessing of the number of components in mixture models. The article is organized as follows. Popular mixture model selection criteria are reviewed in Sect. 2. Section 3 is devoted to initialization strategies for EM to estimate a mixture model. First, standard strategies are reviewed. Then a recursive initialisation procedure is proposed when several numbers of components are considered. The issue of degeneracies is considered in Sect. 5 and it is proposed to avoid them by replacing the likelihood with a regularized likelihood in a Bayesian perspective (Fraley and Raftery 2007). Section 6 is devoted to numerical experiments comparing different initialization procedures and their effect on mixture model selection. The numerical experiments on both simulated and real datasets highlight the performances of the compared initialization strategies to get sensible local maximizers of the penalized likelihood. A discussion section ends this article.
2 Mixture model selection criteria
This section is focused on the selection of the number of components in a mixture model. Thus, it is convenient to index the parameter \(\theta \) with the number of components of the mixture at hand and denote it \(\theta _K\). We only sketch some popular model selection criteria and refer the reader to the Chapter 6 in McLachlan and Peel (2000) for an extensive presentation on assessing the order of a mixture model.
2.1 BIC criterion
If the purpose of the mixture modeling is to get a semi-parametric density estimation, the BIC criterion (Schwarz 1978) has been proved to be practically adequate for choosing \(K\) (Roeder and Wasserman 1997; Fraley and Raftery 2002). Actually, under some regularity conditions, it is proved to asymptotically select the model minimizing the Kullback–Leibler distance to the true distribution, so the true model when it is available (Keribin 2000). This criterion has been derived within a Bayesian framework. It is an asymptotic approximation, as the number of observations goes to infinity, of the logarithm of the integrated likelihood
\(\pi \) being a prior distribution for \(\theta _K\). It is
\(D_K\) being the dimension of \(\theta _K\). Note that BIC is a pseudo-Bayesian criterion since it does not depend on the prior distribution \(\pi (\theta _K)\).
2.2 ICL criterion
If the purpose of the mixture modeling is model-based clustering the ICL criterion could be preferred to BIC (see Biernacki et al. 2000). ICL is an asymptotic BIC-like approximation of the logarithm of the complete integrated likelihood
where the missing labels \(z_i\) are replaced with their most probable values \(\hat{z}_i\) for the ml estimate \(\hat{\theta }_K\): for \(i=1,\ldots ,n\), \(\hat{z}_{ik}=1\) if \(k= \arg \max _{\ell } \hat{\tau }_{i\ell }\) and 0 otherwise. Here \(\hat{\tau }_{ik}\) indicates the conditional probability of \(y_i\) to arise from the \(k\)th component of the mixture with ml parameter \(\hat{\theta }_K\). ICL is
where
is the entropy of the fuzzy clustering associated to the \((\hat{\tau }_{ik})_{i=1,\ldots ,n; k=1,\dots ,K}\).
2.3 The slope heuristic
It is important to recall that BIC and ICL are asymptotic criteria which behavior can be jeopardized when the number \(d\) of descriptors is not small with respect to the number \(n\) of observations. In such cases the slope heuristics of Birgé and Massart (2007), see also Baudry et al. (2011) can be a useful alternative. In the mixture context, it may be summarized as follows. Considering a criterion of the form
it is assumed (i) that there exists a minimal \(\rho _{\mathrm{min}}\) such that any lighter penalty selects models with clearly too high complexities and such that heavier penalties select models with reasonable complexity; (ii) \(\rho _{\text{ opt }}=2\rho _{\text{ min }}\) provides us with an optimal penalty. In Baudry et al. (2011), it is proposed to directly estimate \(\rho _{\text{ min }}\) by the slope of \(\log L(K)\) with respect to \(D_K\) via a robust regression method. Obviously, this procedure requires that \(\log L(K)\) behaves linearly with respect to \(D_K\) at least for large enough values of \(K\). Thus, an efficient use of the slope heuristics requires to get stable maximum likelihood values for a large amount of numbers of mixture components. SH is expected to minimize the risk (Birgé and Massart 2007; Baudry et al. 2011).
In order to lead to an honest selection of \(K\), all these criteria require reasonable evaluations of the consistent ml estimates of \(\theta _K\) for a large amount of values of \(K\). As a consequence, solid initialization procedures for EM are needed.
3 Initializing the EM algorithm
The choice of \(\theta ^0\) is decisive for the EM algorithm. Several strategies have been proposed to initiate EM for estimating mixture parameters and are available in mixture softwares. Initialization strategies can be distinguished by the importance they give to randomness. Some procedures available in the mixmod software (http://www.mixmod.org) use intensively random initializations and have been proposed in Biernacki et al. (2003) (see also Berchtold 2004).
-
Random This basic procedure consists of running the EM algorithm until convergence from several random positions and to keep the solution providing the largest likelihood.
-
Small EM This procedure consists of using a large number of short runs of EM. By a short run of EM, we mean that we do not wait for convergence and that we stop the algorithm after a few iterations (say five). Then EM is run from the parameter value providing the largest likelihood from these short runs of EM.
-
SEM The SEM algorithm is a stochastic algorithm incorporating between the E and M steps of EM a restoration of the unknown component labels \(z_i\), \(i = 1,\ldots , n\) by drawing them at random from their current conditional distribution. The SEM algorithm is the same as the Monte Carlo EM algorithm with a single replication (see McLachlan and Krishnan 2008, Chapter 6). This algorithm generates a Markov chain with a unique stationary distribution independent of its initial position. The SEM procedure consists of starting EM with the parameter value providing the largest likelihood from a long run of the SEM algorithm.
-
CEM The CEM algorithm, see for instance (Celeux and Govaert 1992) is a classification algorithm incorporating a classification step between the E and M steps of EM. This classification step consists of assigning each observation \(y_i\) to the mixture component maximizing the current conditional probability \((\tau _{ik})_{k\in \{1,\ldots ,K\}}\). This algorithm converges in a small number of iterations. The CEM procedure consists of repeating a large number of times the CEM algorithm from random initial positions and to start EM with the parameter value providing the largest likelihood from these runs of the CEM algorithm.
Moreover, it is recommended to involve several starts from the procedures Small EM and CEM. Among these procedures, Small EM is often preferred. It is the default initialization procedure in the mixmod software. But none of them has shown to outperform the other procedures. Moreover, all of them can appear to be disappointing in a large dimension setting because the domain parameter to be explored becomes very large or when the number of mixture components is large.
At the opposite, deterministic initialization procedures such as the hierarchical procedure proposed in the software Mclust do not use random starting solutions (http://www.stat.washington.edu/mclust). Such hierarchical initialization can be outperformed by the above mentioned random procedures. But, it provides more stable results which can be viewed as an advantage in a high dimensional setting or for large numbers of mixture components.
Herafter, we propose recursive initialisation procedures which can be expected to take profit of the advantages of both worlds.
3.1 Recursive initialization
A problem which often occurs in a mixture analysis with different numbers of components is that some solutions may be suboptimal or are spurious. This problem is common with the random initialization procedures of Sect. 3. It could prevent from selecting a sensible number of mixture components with the criteria presented in Sect. 2. The recursive procedures we now present aim to avoid irrelevant parameter estimates.
3.1.1 Recursive algorithms
Assume that the user aims to choose a mixture component with a number of components belonging to \(\{K_{\text {min}}, \ldots ,K_{\text {max}}\}\). Recursive initialization consists of splitting at random one of the component of the \(K\) component solution into two components to get a \((K+1)\) component solution.
-
First the \(K_{\text {min}}\) solution is thoroughly designed using for instance the Small EM procedure repeated a large number of times.
-
From \(K=K_{\text {min}}\), the initial position of the \((K+1)\)-component mixture is obtained by splitting one of the components of the \(K\)-component mixture into two components.
This strategy can be related to Pelleg and Moore (2000), who introduce the X-means algorithm as an extension to the k-means. It enables to choose the number of clusters and to partially remedy to the initialization problem for k-means.
Three different strategies to choose the mixture component to be split will be considered.
-
Random Choice Choose at random the mixture component to be split (Papastamoulis et al. 2014).
-
Optimal Sequential Choice Choose the mixture component to be split by optimizing a splitting criterion.
-
Complete Choice Try to split all the \(K\) components and choose to split the component leading to the largest likelihood (Baudry 2009).
Other splitting strategies such as the strategy in Fraley et al. (2005) especially conceived to deal with large datasets are possible.
3.1.2 Splitting criteria
Possible criteria to choose the component to be split are now presented. They are derived from decompositions of the model likelihood \(L(\theta _K)\)
Splitting the component with the weakest contribution to the likelihood Since
it leads to split the component
An alternative criterion is the normalized contribution to the likelihood of a component
Splitting the component with the weakest contribution to the complete likelihood We have
splitting the component with the weakest contribution to the complete likelihood leads to choose the component
An alternative criterion is the normalized contribution to the complete likelihood of a component
Splitting the component with the largest contribution to the mixture entropy
It leads to split the component
If the normalized entropy is considered instead, it leads to split the component
4 Avoiding degeneracies of the EM algorithm
Deriving the maximum likelihood parameter estimate of a Gaussian mixture faces an important difficulty since the likelihood function of Gaussian mixtures with unrestricted component covariance matrices is unbounded. Thus, the EM algorithm is jeopardized by degenerate solutions. The EM algorithm can fail with some starting values, models, and numbers of components (see for instance McLachlan and Peel 2000, Sect. 3.10). To get rid of this issue in our numerical experiments, we opt for a Bayesian regularization, as in Fraley and Raftery (2007) or Ciuperca et al. (2003), and replace the ml estimate with the maximum a posteriori (MAP) estimate which maximizes the regularized log-likelihood \(\log L(\theta _K)+\log \pi (\theta _K)\), \(\pi \) being a prior distribution on the vector parameter \(\theta _K\).
Since we make use of Bayesian inference merely to avoid degeneracies in the estimation of the component covariance matrices, we put no prior distribution on the mixing proportions and the component mean vectors. Following Fraley and Raftery (2007), we use an inverse Wishart\((\nu , \varLambda )\) exchangeable conjugate prior distribution for the component covariance matrices \(\varSigma _k, k=1,\ldots ,K\). We choose the following prior hyperparameters: \(\nu =d+2\) (as Fraley and Raftery 2007) and \(\varLambda \) depends on the model. Then, the MAP estimate of \(\theta _K\) is derived with the EM algorithm.
For the general model, \(\varLambda =\frac{\sigma _0^{1/d}S}{|S|^{1/d}}\), \(S\) being the empirical covariance matrix of the data \({\mathbf {y}}\) and \(\sigma _0\) a small positive number. We have \(|\varLambda |=\sigma _0\). The greater \(\sigma _0\) the greater the regularization. Thus, this tuning parameter allows to control the regularization. It allows a weaker regularization than the hyperparameter \(\varLambda =\frac{S}{K^{1/d}}\), proposed in Fraley and Raftery (2007). The formulas of the EM algorithm remain the same, except for the updating of the covariance matrices in the M step which becomes [at the \((r+1)\)th iteration] (see Fraley and Raftery 2007 for details)
We also consider Gaussian mixture models with diagonal component covariance matrices \(B_k\), with \(B_k \!=\! \text {diag}(B_{kj}, j\!=\!1,\ldots ,d)\) for \(k=1,\ldots ,K\). In this case, we use an inverse Gamma\((\frac{\nu }{2}, \frac{\zeta _j}{2})\) distribution for \(B_{kj}\) with the prior hyperparameters \(\nu =d+2\) and \(\zeta _j=(\sigma _0)^{1/d}\frac{s_j}{(s_1\ldots s_d)^{1/d}}\), \(s_j\) being the empirical variance of the variable \(j\) and \(\sigma _0\) a small positive number. The updating of the \(B_{kj}\)s at the \((r+1)\) iteration of the EM algorithm is
We also consider Gaussian mixture models with spherical covariance matrices \(\lambda _k I (1 \le k \le K)\) proportional to the identity matrix. In this case, we use an inverse Gamma\((\frac{\nu }{2}, \frac{\zeta }{2})\) distribution for \(\lambda _k\) with the prior hyperparameters \(\nu =d+2\) and \(\zeta =2(\sigma _0)^{1/d}\), \(\sigma _0\) being a small positive number. The updating of the \(\lambda _{k}\)s at the \((r+1)\) iteration of the EM algorithm is
The choice of \(\sigma _0\) is obviously very important. A first idea is to make sure the chosen \(\sigma _0\) does not hide the data structure. With simulated data, it is possible to monitor the evolution of a regularized EM starting from the true parameter and to exclude values of \(\sigma _0\) such that the estimated parameter get too far away. For real datasets, a non regularized ml parameter estimation can replace the true parameter.
5 Numerical experiments
The only way to assess the ability of EM initialization strategies to properly derive the ml estimate of a mixture model is to proceed to numerical experiments in practical situations. In this section, we present the results of numerical experiments on three different kinds of datasets. A six-component Gaussian mixture in \({\mathbb {R}}^2\) is analyzed, first with “true” models, of which some contain the true distribution, and second with “false” models, of which none contains the true distribution. Then a simulated dataset from a Gaussian mixture with a large number of components in \({\mathbb {R}}^3\) is considered. Finally, numerical experiments are achieved on a real dataset with a large number of observations to be clustered.
The initialization strategies considered are:
-
Random 13 runs of EM from random initializations.
-
Small EM Number of iterations of the small runs of EM: 5; number of small runs of EM: 50; repeat 10 times and keep the best.
-
SEM Number of iterations in the SEM runs: 500; number of SEM runs: 8.
-
Mclust Hierarchical initialization.
-
KM1 Complete, L, Ln, etc. are KM1 strategies starting from the best \(K\)-component solution among those obtained from the initialization strategies Random, Small EM, SEM, Mclust and KM1 (for \(K>K_{\text {min}}\)).
-
KM1 sComplete (s stands for sequential) is a KM1 strategy with a complete choice independent of the previous strategies (except for \(K = K_{\text {min}}\)).
The number of iterations of EM after the initialization step is the same for all: 1000. Moreover, we consider the strategy “best without KM1” which consists of choosing the best solution after the final EM run, among those obtained from the strategies Random, Small EM, SEM, and Mclust.
For all simulated numerical experiments (Sects. 5.1, 5.2), 30 datasets were simulated.
5.1 True and wrong models
We consider 600 observations from a six-component Gaussian mixture in \({\mathbb {R}}^2\), where two components have a non-diagonal covariance matrix. The mixture characteristics are given in Fig. 1. At first, general Gaussian mixture models with free variance matrices were fitted to this dataset. The chosen parameter \(\sigma _{0}\) was \(10^{-3}\). Secondly, the fitted Gaussian mixture models were restricted to diagonal covariance matrices (the family denoted by \([p_k\lambda _kB_k]\) in Celeux and Govaert 1995). The chosen parameter \(\sigma _{0}\) was \(10^{-6}\).

True and wrong models dataset. 600 obs. from a six-component Gaussian mixture in \({\mathbb {R}}^2\) (in the family denoted by \([p_k\lambda _kC_k]\) in Celeux and Govaert 1995). \(R_{\theta }\) denotes the \(\theta \) rotation matrix
5.1.1 True models
Despite the fact that it is a favorable situation for the Gaussian mixture model, the EM algorithms could be trapped when trying to maximize the non regularized likelihood as it is apparent from Fig. 2. All the strategies encountered problems with the non-regularized likelihood. Note that, by convention, when the EM algorithm is trapped, we set likelihood to the value obtained with \(K=3\) components. We do so to highlight these situations in the graph. In the following, we use only regularized EM algorithms.

True model experiment. Graphs of the maximized likelihood for different strategies, including non regularized strategies (dashed), as a function of the number of components with the “true” mixture models \([p_k\lambda _kC_k]\)
Note that according to Fig. 3 (i) the MClust strategy becomes disappointing here for \(K>4\), (ii) the SEM strategy seems to outperform the other random strategies for large numbers of components, and (iii) the KM1 Complete strategy provides the highest maximum for all \(K\) values.

True model experiment. Graphs of the maximized likelihood for different strategies as a function of the number of components with the “true” mixture model \([p_k\lambda _kC_k] \); on the right figure, a zoom view
Figure 4 shows that not surprisingly BIC provides most often the true number of mixture components except for the Mclust strategy. SH has a tendency here to overestimate the number of components. For the strategies which do not involve KM1, SH can select surprisingly high numbers of components. It is noteworthy that ICL prefers almost always the clustering solution in four clusters visible in Fig. 1. This experiment illustrates clearly the fact that ICL is not aiming to recover the true number of components but to select a stable clustering solution.

True model experiment. Frequencies of choices of the number of mixture components with the criteria SH, BIC, and ICL for the true mixture model \([p_k\lambda _kC_k]\)
5.1.2 Wrong models
First, for this more sensitive situation, we display the behavior of the KM1 strategies presented in Sect. 3.1.2 to get a sensible maximizer. It is apparent from Fig. 5, that all the considered splitting criteria behave almost the same and are outperformed by the strategies KM1 Complete and KM1 sComplete. This behavior always occurs in all the situations of our numerical experiments. For simplicity, these splitting criteria will be omitted in the following. In practice, both “complete” KM1 strategies have analogous performances, but sometimes the KM1 sComplete strategy is outperformed by the KM1 Complete strategy. Since this strategy is also more natural (there is no reason not to choose the best solution among the \(K\) components), we only show the KM1 Complete strategy.

Wrong model experiment. Behavior of the maximized likelihood for the different KM1 strategies as a function of the number of components with the wrong diagonal mixture model \([p_k\lambda _kB_k]\)
Figure 6 confirms the superiority of the KM1 strategy and the good behavior of the SEM strategy. It is also important to remark that all strategies but KM1 can lead to a non-increasing likelihood as a function of \(K\). Figure 7 illustrates the ability of ICL to select a sensible number of clusters despite the fact that the family of models is not quite relevant. Not surprisingly, in this misspecified setting, BIC and SH have a tendency to overestimate the number of components (see Biernacki et al. 2000).

Wrong model experiment. Behavior of the maximized likelihood for different strategies as a function of the number of components with the wrong diagonal mixture model \([p_k\lambda _kB_k]\); on the right figure, a zoom view

Wrong model experiment. Frequencies of choices of the number of mixture components with the criteria SH, BIC, and ICL for the wrong diagonal mixture model \([p_k\lambda _kB_k]\)
5.2 Bubbles dataset
This simulated dataset, plotted in Fig. 8, is composed of 1000 observations in \({\mathbb {R}}^3\). It consists of an equiprobable mixture of three large bubble groups centered at \(\nu _1=(0, 0, 0)\), \(\nu _2=(6, 0, 0)\), and \(\nu _3=(0,6,0)\), respectively. Each bubble group \(j\) is simulated from a mixture of seven components according to the following density distribution:
with \(\mu _1=(0,0,0),\ \mu _2=(0,0,1.5),\ \mu _3=(0,1.5,0), \mu _4=(1.5,0,0),\ \mu _5=(0,0,-1.5),\ \mu _6=(0,-1.5,0)\) and \(\mu _7=(-1.5,0,0)\). Thus, the distribution of this dataset is actually a 21-component Gaussian mixture. The reader is referred to Baudry (2009), Chapter 5 for more details. This is a challenging dataset because of the high number of components which overlap and have small sizes. A model collection \((S_m)_{1\le m \le M_{\mathrm{max}}}\) of spherical Gaussian mixtures with covariance matrices \(\varSigma _k = \lambda _k I_3\) with \(\lambda _k\in {\mathbb {R}}_{+}^\star \) is fitted to the Bubbles data set. The chosen parameter \(\sigma _{0}\) was \(10^{-6}\).

Bubbles dataset. 1000 obs. from a 21-component spherical Gaussian mixture in \({\mathbb {R}}^3\)
From Figs. 9 and 10, again KM1 appears to be the best strategy and the Best without KM1 solution produces a non-increasing log-likehood in function of \(K\). The SEM strategies behaves well. But, on the contrary to Mclust, the strategies Small EM and Random are amazingly suboptimal around \(K=21\), the true number of components. And actually, there is no sensitive difference between BIC and SH which have difficulties to recover the true number of clusters with these two strategies. Otherwise ICL does not select a stable number of clusters.

Bubbles experiment. Behavior of the maximized likelihood for different strategies as a function of the number of components with the spherical mixture model \([p_k\lambda _kI]\) for the bubbles dataset; on the right figure, a zoom view

Bubbles experiment. Frequencies of choices of the number of mixture components with the criteria SH, BIC, and ICL for the spherical mixture model \([p_k\lambda _kI]\) on the Bubble dataset
5.3 Dynamic expression of the transcriptome in embryonic flies
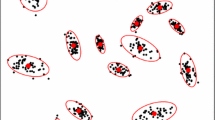
As part of the modENCODE project, which aims to provide functional annotation of the Drosophila melanogaster genome, Graveley et al. (2011) characterized the expression dynamics over 27 distinct stages of development during the life cycle of the fly using RNA-seq. Rau et al. (2015) use a subset of these data from 12 embryonic samples that were collected at two-hour intervals for 24 h, with one biological replicate for each time-point to illustrate a clustering method derived from a Poisson mixture. The phenotype tables and raw read counts for the 13,164 genes with at least one non-zero count among the 12 time-points were obtained from the ReCount online resource (Frazee et al. 2011). In this paper, we consider this dataset to illustrate initialization strategies of the EM algorithm for Gaussian mixture on a large dataset. For this purpose, we transform the count data \({\mathbf {c}}\) with the \(\log (c_j +1), j=1,\ldots ,12\) transformation. Then, we apply a PCA on the resulting dataset in \({\mathbb {R}}^{12}\) and apply a Gaussian mixture model to the first two coordinates of the PCA. The chosen parameter \(\sigma _{0}\) was \(10^{-6}\). The analyzed dataset is represented in Fig. 11.

The Drosophila dataset represented in the plane of its first principal components. The ellipses depict the three Gaussian components chosen by ICL with the KM1 strategy
For this dataset, the superiority of KM1 is more marked. Moreover, the strategies without KM1 produce clearly non-increasing likelihoods in function of \(K\) (Fig. 12). ICL with KM1 chooses a sensible number of clusters (\(K=3\)) depicted in Fig. 11. The choice of \(K\) in a density estimation purpose seems more difficult. As a matter of fact, with the KM1 strategy, BIC chooses \(K=12\) components while SH chooses \(K=17\) components (see Table 1).

Drosophila dataset. Behavior of the maximized likelihood for different strategies as a function of the number of components; on the right figure, a zoom view
6 Discussion
We highlight some difficulties which can arise with the EM algorithm for maximizing the likelihood of a Gaussian mixture model. The degeneracies of the likelihood can be addressed by a Bayesian regularization. But the initialization issue remains and can be a most influencial factor.
To avoid the traps associated to degeneracies, we replace the unbounded log-likelihood with a regularized log-likelihood derived from a Bayesian regularization (Fraley and Raftery 2007). We modify their prior hyperparameter choices to get less regularized log-likelihood, the strength of the regularization depending on a single scalar hyperparameter \(\sigma _0\). Thus, the degeneracies in maximum likelihood methods are avoided. But, it is important to choose carefully \(\sigma _0\) to ensure stable results and meaningful estimates.
Biernacki et al. (2003) proposed random Search/Run/Select initialization strategies as Small EM and SEM. They stated that no strategy outperforms the others and indicated that likelihood singularities can make the task more difficult. The present study confirms the difficulty to favor a strategy against the others. Actually, these authors remark that in their experiments the Small EM strategy is slightly better than the others. But in our numerical experiments, SEM seems to be slightly better than all the others, including Small EM.
Beside random Search/Run/Select strategies, we propose recursive initialization strategies, so called KM1, which initialize the \((K+1)\) component mixture by the use of the \(K\) components solution. These recursive initialization strategies start from solutions which can be expected to be close to the ml estimate. Thus, the EM algorithm is expected to converge faster with them than with fully random initializations. In this framework, we have defined several criteria to choose the component to be split. They all appear to be outperformed by the KM1 Complete procedure which consists of trying to split all the \(K\) components and splitting the component leading to the largest likelihood. Obviously, this complete procedure is up to \(K\) times more expensive than the procedures using a criterion to split a component. But, this price remains often reasonable and ensures almost consistently better results. It is noteworthy that, on the contrary to the other initialization strategies, KM1 provides increasing log-likelihood graphs.
The influence of the initialization procedures on the choice of the complexity of a model can be important. It is not so important with the clustering criterion ICL which provides quite stable results. It is more important with the slope heuristics SH and BIC. In particular, Small EM and KM1 procedures can lead to different choices. And, in such cases, the solutions provided with the KM1 procedure can be preferred. On the other hand, it is rather difficult from these numerical experiments to compare the behavior of SH and BIC criteria, but it is beyond the scope of this article. BIC may be more able to recover the true number of components when it exists and provide stabler selections. Notice also that the KM1 strategy is helpful to produce a consistent estimation of the slope of the maximized likelihood.
Finally, let us stress the importance of the choice of the parameter \(\sigma _0\) to get an honest regularization. This is the topic of a current work.
References
Banfield, J.D., Raftery, A.E.: Model-based Gaussian and non-Gaussian clustering. Biometrics 49, 803–821 (1993)
Baudry, J.-P.: Sélection de modèle pour la classification non supervisée. Choix du nombre de classes. PhD thesis, Université Paris-Sud (2009)
Baudry, J.-P., Maugis, C., Michel, B.: Slope heuristics: overview and implementation. Stat. Comput. 22, 455–470 (2011)
Berchtold, A.: Optimisation of mixture models: comparison of different strategies. Comput. Stat. 19, 385–406 (2004)
Biernacki, C., Celeux, G., Govaert, G.: Assessing a mixture model for clustering with the integrated completed likelihood. IEEE Trans. Pattern Anal. Mach. Intell. 22, 719–725 (2000)
Biernacki, C., Celeux, G., Govaert, G.: Choosing starting values for the EM algorithm for getting the highest likelihood in multivariate gaussian mixture models. Comput. Stat. Data Anal. 41, 561–575 (2003)
Birgé, L., Massart, P.: Minimal penalties for Gaussian model selection. Probab. Theory Relat. Fields 138, 33–73 (2007)
Celeux, G., Govaert, G.: A classification EM algorithm for clustering and two stochastic versions. Comput. Stat. Data Anal. 14, 315–332 (1992)
Celeux, G., Govaert, G.: Parsimonious Gaussian models in cluster analysis. Pattern Recognit. 28, 781–793 (1995)
Ciuperca, G., Ridolfi, A., Idier, J.: Penalized maximum likelihood estimator for normal mixtures. Scand. J. Stat. 30, 45–59 (2003)
Dempster, A.P., Laird, N.M., Rubin, D.B.: Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B (Methodological) 39(1), 1–38 (1977)
Fraley, C., Raftery, A., Wehrens, R.J.: Incremental model-based clustering for large datasets with small clusters. J. Comput. Graph. Stat. 14, 529–546 (2005)
Fraley, C., Raftery, A.E.: Model-based clustering, discriminant analysis and density estimation. J. Am. Stat. Assoc. 97, 611–631 (2002)
Fraley, C., Raftery, A.E.: Bayesian regularization for normal mixture estimation and model-based clustering. J. Classif. 24, 155–181 (2007)
Frazee, A.C., et al.: ReCount: a multi-experiment resource of analysis-ready RNA-seq gene count datasets. BMC Bioinform. 12, 449 (2011)
Graveley, B.R., et al.: The development transcriptome of Drosophila melanogaster. Nature 471, 473–479 (2011)
Keribin, C.: Consistent estimation of the order of mixture models. Sankhya A 62(1), 49–66 (2000)
McLachlan, G., Krishnan, T.: The EM Algorithm and Extensions, 2nd edn. Wiley, Hoboken (2008)
McLachlan, G.J., Peel, D.: Finite Mixture Models. Wiley, New York (2000)
Papastamoulis, P., Martin-Magniette, M.-L., Maugis-Rabusseau, C.: On the estimation of mixtures of poisson regression models with large numbers of components. Computat. Stat. Data Anal. (to appear) (2014)
Pelleg, D., Moore, A.W.: X-means: Extending k-means with efficient estimation of the number of clusters. In: Langley, P. (ed.) ICML, pp. 727–734. Morgan Kaufmann (2000)
Rau, A., Maugis-Rabusseau, C., Martin-Magniette, M.-L., Celeux, G.: Co-expression analysis of high-throughput transcriptome sequencing data with Poisson mixture models. Bioinformatics. (to appear) (2015)
Roeder, K., Wasserman, L.: Practical Bayesian density estimation using mixtures of normals. J. Am. Stat. Assoc. 92, 894–902 (1997)
Schwarz, G.: Estimating the dimension of a model. Ann. Stat. 6, 461–464 (1978)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Baudry, JP., Celeux, G. EM for mixtures. Stat Comput 25, 713–726 (2015). https://doi.org/10.1007/s11222-015-9561-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11222-015-9561-x