
Abstract
We extend previous work on the role of politically motivated donors who contribute to candidates in an election with single dimension policy preferences. In a two-stage game wherein donors observe candidate policy positions and then allocate funding accordingly, we find that reducing the cost of donations incentivizes candidates to position closer to one another, reducing policy divergence. Furthermore, we find that as donations become more effective at influencing voter decisions, candidates respond less to voter preferences and more to those of donors. In addition, we analyze the presence of asymmetries in the model using numerical analysis techniques. We also extend our model by allowing for public funding from governments. By implementing stringent campaign contribution limits, candidate positions align with voter preferences at the cost of wider policy divergence. In contrast, unlimited campaign contributions lead to candidate positions moving away from voters to donors’ preferences, but increase policy convergence.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The landscape of American campaign finance has changed drastically over the past decade. With the Supreme Court of the United States of America’s landmark 2010 decision in Citizens United v. FEC, the ability to contribute to political parties by corporations, unions, and other similar organizations was declared protected as a form of free speech. Following that ruling, in 2014, the Supreme Court in McCutcheron v. FEC ruled that donations by private individuals to political candidates cannot be limited. Those two rulings coincided with a drastic increase in campaign contributions and spending by American politicians.Footnote 1 In this paper, we examine whether setting no limits on political contributions to candidates can align their policies closer to the median voter’s or, instead, move them further away, hindering political representation. Specifically, we demonstrate that setting no limit on donations, as currently in the United States, induces candidates to converge towards one another in a race to deny donations to their opponents. While more policy convergence arises in that setting, it moves towards the donors’ preferred policies, which often may differ from those of voters. We also analyze the opposite scenario, wherein regulations set stringent limits on donations (such that each individual may donate a maximum amount, and political parties are limited in what they can spend). In that context, our results show that, while donors still have incentives to contribute to either candidate, candidates consider their own ideal policies and those of voters, but ignore those of the donors. As a consequence, more policy divergence emerges than when donations are limited severely.
We consider a two-stage game in which, in the first period, all candidates announce simultaneously their policy positions; in the second period, donors observe candidates’ positions, and respond by contributing to either (or both) candidates. Given political positions and donations, every candidate has a positive probability of winning the election that depends on the underlying distribution of voter preferences, and on the amount of campaign funding each candidate receives (e.g., voters’ decisions are affected by advertising and home visits). For generality, we assume that, when choosing his policy position, every candidate considers: (1) his probability of winning the election, as in Downs (1957), and (2) the difference between the policy of his opponent and his ideal, as in Wittman (1983). Our setting thus allows for a combination of those two polar incentives, which also lets us examine the models of Downs or Wittman as special cases.
Candidates face three separate incentives when choosing their policy positions. First, as in the original Downs model (without contributions), candidates select their positions by considering only their probabilities of winning the election (i.e., locating as close as possible to the median voter). Adding expected policy payoffs (i.e., motive (2) above, but still without donations) would reduce candidates’ incentives to locate at the median voter’s ideal point, as they also must consider the utility they obtain from the implemented policy. Finally, if contributions are allowed, candidates also must consider donors’ ideal policies in order to maximize their shares of donations.
In the equilibrium of the second stage, we show that donors contribute at most to one candidate. Intuitively, if a donor contributing to one candidate donates to the other, he would be reducing the former’s probability of winning, which is contrary to his original objective. In the first stage, candidates anticipate the effect that a change in their political position has on donations during the second stage before choosing their policy position, thus considering the three forces mentioned above. Furthermore, we demonstrate the existence of a “donation stealing” incentive (as explained originally in Ball 1999a), whereby every candidate, by locating closer to his opponent’s donor, reduces his rival’s donations more significantly than the reduction he experiences in his own contributions. That consideration plays a role when donations become less costly, i.e., when more policy convergence can be sustained in equilibrium as candidates try to deny donations to their rivals.
For presentation purposes, we first analyze a symmetric setting, wherein voters, donors, and candidates are distributed symmetrically around the midpoint of the policy spectrum. In that context, we show that adding donations has no effect on the Downsian results, regardless of their cost and effectiveness. In contrast, allowing for political contributions in the Wittman model gives rise to the donation stealing effect, ultimately increasing policy convergence. In addition, we show that as donations become more effective at determining the outcome of the election, candidates move away from the median voter toward the (average of) donors’ ideal policies.
In the asymmetric version of the model, we first demonstrate that equilibrium results are qualitatively unaffected when candidates place sufficiently high weight on the utility derived from the implemented policy. However, when such weight is low, candidates can gain a donation advantage relative to their opponent by positioning closer to one of the donors and further away from the median voter. If a candidate chooses such a position, his opponent mimics his strategy, leading the former to move back to a position close to the median voter, ultimately yielding that no stable policy profile emerges in equilibrium. In the special case where donors prefer similar ideal policies, we find that the candidate whose ideal policy is closest to those of the donors receives all donations, while his opponent chooses a position favorable to the distribution of voter preferences.
To build a more complete picture of actual elections, we introduce public funding as an extension of our model. When one candidate enjoys a funding advantage prior to announcing his position (as is common in many publicly funded elections where funding is allocated based on votes in the previous election), we find that he positions closer to his ideal policy, while his opponent also positions closer to him in order to balance the advantage in public funding.
We also model the effect of campaign contribution limits, as seen in the United States until 2014 (for a list of countries setting contribution or spending limits, see “Appendix 4”). We find that when donation constraints are low, candidates behave as if donations were not possible, leading to maximal policy divergence, but their incentives align with voter preferences. Intermediate constraints yield situations wherein no equilibrium in pure strategies exists; nonbinding high constraints (or no limits) yield the least amount of policy divergence, but allow equilibrium candidate positions to be distorted towards the ideal policies of the donors rather than the voters.
Our results thus contribute to discussions of the costs and benefits of limiting campaign contributions. On one hand, political processes, e.g., the United States Congress, can implement stringent donations, which aligns candidate behavior with voter preferences at the cost of greater policy divergence. On the other hand, political processes can leave donations unlimited, which allows candidate behavior to skew in favor of donor preferences, but increases policy convergence. Depending on donor preferences relative to those of voters and how effective donations are at influencing elections, either stance of the political process could be optimal.
1.1 Related literature
Our model extends previous work by Ball (1999a), which considers a spatial setting wherein policy positions are ordered along a uni-dimensional line, which borrows from the works of Hotelling (1929) and d’Aspremont and Gabszewicz (1979). The seminal work of Downs (1957) establishes that, when every candidate seeks only to maximize his own probability of winning an election, he positions at the median voter, thus achieving perfect policy convergence.Footnote 2 McKelvey (1975) and Wittman (1983) build upon the work of Downs but assume that candidates care about which policy is implemented (and have different desired policies), rather than their probability of winning the election.Footnote 3 In that setting, policy divergence can be sustained in equilibrium, such that each candidate positions closer to his own ideal policy and away from the median voter.Footnote 4 Our model encompasses both approaches as special cases, adds the role of political contributions, and the effects of limiting campaign funding.Footnote 5
From the perspective of general campaign spending, Welch (1974) develops an initial economic model of campaign finance. Adamany (1977) and Welch (1980) later explore the effect of striking down the Federal Election Campaign Act of 1976. In the campaign finance literature, the seminal work of Austen-Smith (1987) establishes that candidates announce their policy positions anticipating the reactions of prospective donors.Footnote 6 Ball (1999a) builds upon that initial model and shows that candidates not only choose their policy positions based on how they expect their own potential donors to react, but they also take into consideration the effects their positions have on the amounts donated to rivals. Our work extends Ball’s by allowing for asymmetries, such as when both candidates or donors prefer a policy position that is to the left or right of the median voter. In Ball’s original model, symmetry was required in order to guarantee a closed-form solution, as described in Ball (1999b). By using numerical analysis, we examine asymmetries and analyze cases wherein donors, candidates, or voters favor policies that are not in perfect balance with one another. In addition, Ball’s work focused solely on the case in which candidates obtain utility from implemented policies (i.e., based on Wittman’s model). We consider candidates who are interested in winning the election (as in Downs), in the implemented policy (as in Wittman), or in both.
Regarding advertising in political elections, Kaid (1982) suggests that spending money on political advertisements increases name recognition for that candidate. In addition, Bowen (1994), and West (2005) conclude that advertising delivers other positive effects to a candidate, which may not be related directly to vote shares, such as likability. Regarding vote shares, Shaw (1999), Goldstein and Freedman (2000), Stratmann (2009) and Gordon and Hartmann (2013) demonstrate that electoral advertising leads directly to an increase in the vote share of the advertising candidate. We follow that line of reasoning and treat advertising expenditure as a method of increasing the probability that the advertising candidate wins.
Several studies estimate ideal policy positions for elected officials. Poole and Rosenthal (1984) measure policy divergence in the US Senate from 1959 to 1980, finding that policy divergence increased over that time period. Hare and Poole (2014) follow up on that initial study, updating the data to the Obama administration and find that, while the Democrat Party has become slightly more liberal since 1980, the Republican Party underwent a large conservative shift. Our paper models those shifts in ideal policy positions and the resulting change in equilibrium policies and donations.Footnote 7
In real life, special interest groups can offer donations at any stage of the electoral competition. While several studies consider donors offering contribution menus at the beginning of the game, as in Grossman and Helpman (2001), our setting allows contributions after candidates choose policy positions. Therefore, our model closely fits recent elections, such as the 2012 US presidential election.Footnote 8 When donors act first, contributions are made under a rather involved implicit contract defining donations as a function of both candidates’ positions; explicit contracts typically are illegal and thus not enforceable. Our setting, however, allows donors to observe candidates’ positions and respond to them without the need for a contract.
Our model’s time structure is therefore similar to that in Herrera et al. (2008), which considers two parties choosing binding policy positions during the first stage, and their campaign effort (fund raising) in the second stage. Our setting, however, assumes that funding comes from donors. Anticipating the donors’ ideal policies, we show that candidates can alter their announced policies in the first stage to capture larger contributions than their rival. We also allow for public funding to play a role in candidates’ policies, as in Ortuno-Ortín and Schultz (2005). Unlike our model, they consider that candidates do not receive contributions from donors. Instead, they assume that candidates’ campaigns are financed by two sources: public funding, based on the candidate’s previous vote share, and non-public sources (a lump-sum subsidy) which does not provide candidates with incentives to alter their policy positions to receive more funds. In contrast, our model allows for strategic effects to arise between candidates and donors.
Section 2 describes the model, while Sect. 3 presents equilibrium results in the first and second stage. Section 4 provides a numerical simulation to illustrate our findings, and Sect. 5 extends our model to asymmetric candidates, donors, and voter distributions; allows for public funding; and analyzes the effect of donation constraints on equilibrium policy positions. Section 6 concludes and discusses our results.
2 Model
Consider two candidates competing for office. Every candidate \(i\in \{A,B\}\) chooses a policy position \(x_{i}\)\(\in [0,1]\). Every voter has his own preferred policy position distributed along [0, 1]. Voters choose the candidate that delivers the higher utility level and is more likely to vote for a candidate whose policy position is closer to their own. Every candidate cares about his probability of winning the election (as in Downs 1957), and his expected utility from the elected policy (as in Wittman 1983).
In addition to candidates and voters, we also assume two donors; each donor k is endowed with an exogenous sum of money, \({\bar{k}}\), and with a preferred position, \({\hat{d}}_{k}\), where \(k\in \{L,R\}\).Footnote 9 Donors face a marginal cost of contributions c, which represents the opportunity cost of donated money. As we describe in the following sections, every donor uses donations instrumentally to induce candidates to position closer to the donor’s ideal policy. In turn, a campaign with more funding is better able to promote its respective candidate, thereby increasing the candidate’s probability of winning the election.
The time structure of the game is the following: In stage 1, candidates simultaneously and independently announce their policy positions, which are observed by both donors and voters. In stage 2, every donor responds simultaneously and independently by allocating donations to one, both, or no candidates. In the last stage, votes are a function of the candidates’ chosen positions, as in Downs’s and Wittman’s models; wherein that probability is affected by donors’ contributions to each candidate. Since the probability function is exogenous, its effect is considered only when analyzing candidates’ probabilities of winning (Sect. 3.1), and donors’ expected utilities from the implemented policy (Sect. 3.2).
3 Equilibrium results
3.1 Stage 2: donor’s funding decisions
In stage 2, every donor \(k\in \{L,R\}\) seeks to maximize his expected utility based on the election’s outcome, which we can express with the following objective function:
where \(k_{i}\) denotes donor k’s monetary contribution to candidate i’s campaign; \(i\in \{A,B\}\), \(p_{i}(\cdot )\) represents the subjective probability that candidate i wins the election, \(x_{i}\) denotes candidate i’s policy position, \(D_{i}\) captures the aggregate donations received by candidate i, i.e., \(D_{i}\equiv k_{i}+l_{i}\); and \(u_{k}(\cdot )\) represents the utility that donor k receives based on the outcome of the election. As in the standard Downs (1957) and Wittman (1983) models, candidates do not have precise knowledge of voters’ utility functions, which prevents candidates from knowing exactly how voters will vote (all proofs are relegated to the “Appendix”).
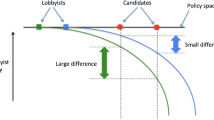
For compactness, let \(g_{k}(x_{i},x_{j})\equiv u_{k}(x_{i};{\hat{d}}_{k})-u_{k}(x_{j};{\hat{d}}_{k})\) be the utility gain that donor k obtains from candidate i relative to \(j\ne i\). Solving for \(g_{k}(x_{i},x_{j})\) in expression (2) yields \(g_{k}(x_{i},x_{j})\le {\hat{p}}_{i}\), where \({\hat{p}}_{i}\equiv \frac{c}{\frac{dp_{i}}{dD_{i}}}\). Figure 1 depicts the utility gains of donor k, \(g_{k}(x_{i},x_{j})\) in the horizontal axis; and includes \({\hat{p}}_{i}\), \({\hat{p}}_{j}\) and the origin, where \(g_{k}(x_{i},x_{j})=0\) gives rise to three different regions, A-C. For instance, region A satisfies \(g_{k}(x_{i},x_{j})\ge {\hat{p}}_{i}\); region B has \({\hat{p}}_{j}<g_{k}(x_{i},x_{j})<{\hat{p}}_{i}\); and similarly for region C.

Donor behavior
Proposition 1
Equilibrium donations (\(k_{i}^{*},k_{j}^{*}\)) satisfy:
-
1.
Region A.\(0<k_{i}^{*}\le {\bar{k}}\), \(k_{j}^{*}=0\)if\(g_{k}(x_{i},x_{j})\ge {\hat{p}}_{i}\).
-
2.
Region B.\(k_{i}^{*}=k_{j}^{*}=0\)if\({\hat{p}}_{j}<g_{k}(x_{i},x_{j})<{\hat{p}}_{i}\).
-
3.
Region C.\(k_{i}^{*}=0\), \(0<k_{j}^{*}\le {\bar{k}}\)if\(g_{k}(x_{i},x_{j})\le {\hat{p}}_{j}\).
In region A (C) of Fig. 1, donor k’s marginal benefit of contributions to candidate i (j) is greater than or equal to his marginal cost. Intuitively, because the policy position that candidate i (j) presents to donor k is favorable relative to candidate \(j\ne i\)’s (\(i\ne j\)’s), donor k makes a contribution to candidate i’s (j’s) campaign. When the marginal benefit of contributions is equal to the marginal cost, donor k contributes some positive amount, \(k_{i}^{*}>0\) (\(k_{j}^{*}>0\)), whereas when the marginal benefit strictly exceeds the marginal cost, donor k contributes as much as possible to candidate i (j), i.e., \(k_{i}^{*}={\bar{k}}\) (\(k_{j}^{*}={\bar{k}}\), respectively).
Lastly, in region B, the marginal benefit that donor k receives from contributions to either candidate i is strictly less than the marginal cost. That induces donor k to withhold all contributions from either candidate. Intuitively, candidate i and \(j\ne i\)’s policy positions do not differ enough for donor k to support either candidate monetarily.
With the equilibrium behavior of both donors defined as in Proposition 1, we can sign the best response functions for both candidates, as presented in Corollaries 1 and 2.
Corollary 1
When donors k and \(l\ne k\) each contribute to the same (opposite) candidate, their contributions are decreasing (increasing) in the other donor’s contribution, i.e.,\(\frac{dk_{i}}{dl_{i}}=-1\,\left( \frac{dk_{i}}{dl_{j}}>0\right)\).
When both donors support the same candidate, additional contributions from either candidate reduce the marginal benefit of further contributions.Footnote 10 On the other hand, when donors support opposite candidates, additional contributions from either candidate increase the marginal benefit of additional contributions to the other donor.Footnote 11
Corollary 2
Donor k ’s contribution to candidate i , \(k_{i}^{*}\) , weakly increases (decreases) in candidate i ’s position, \(x_{i}\) , if \(x_{i}<{\hat{d}}_{k}\) ( \(x_{i}>{\hat{d}}_{k}\) , respectively, where \({\hat{d}}_{k}\) is donor k ’s ideal policy position). Furthermore, \(k_{i}^{*}\) weakly decreases (increases) in candidate j ’s position, \(x_{j}\) if \(x_{j}<{\hat{d}}_{k}\) ( \(x_{j}>{\hat{d}}_{k}\) , respectively).
When candidate i moves closer to k’s ideal policy position, the utility gain that donor k receives from candidate i’s position rises. On the other hand, if candidate j moves towards donor k’s ideal policy position, the utility that donor k receives from candidate j’s position increases, thus reducing the marginal benefit of donor k contributing to candidate i.
3.2 Stage 1: policy decisions
In the first stage, every candidate \(i\in \{A,B\}\) seeks to maximize his expected payoff, given how he anticipates donors will respond in the second stage. For simplicity, let \(p_{i}\equiv p_{i}(x_{i},x_{j},k_{i}^{*}+l_{i}^{*},k_{j}^{*}+l_{j}^{*})\) denote the probability that candidate i wins the election. Therefore, candidate i solves
where \(v_{i}(x_{i})\) represents the payoff candidate i receives when his chosen policy prevails (i.e., he wins the election); \(v_{i}(x_{j})\) denotes candidate i’s payoff from losing the election (but having candidate j’s policy position implemented); w represents the utility that candidate i receives from holding office; and \(\gamma\) reflects how candidate i weighs his expected payoff from policy implementation against his probability of winning the election.Footnote 12 Hence, the first term in expression (2) coincides with the specification used in Wittman (1983), where candidates are expected payoff maximizers, while the second term in expression (2) corresponds with the original Downs (1957) model where candidates maximize the probability of winning the election. Thus, by setting \(\gamma =1\), our model becomes identical to Wittman’s (1983), or if we set \(\gamma =0\), we obtain Downs’s (1957) model. Function \(v_{i}(\cdot )\) is strictly concave, reaching a maximum at candidate i’s ideal policy position, \({\hat{x}}_{i}\), which we assume to be given exogenously.Footnote 13 The next lemma studies equilibrium conditions from candidate i’s problem in (2).
Lemma 1
Candidate i ’s equilibrium position, \(x_{i}\) , solves
where term \(\frac{dp_{i}}{dx_{i}}\) can be expressed as
In words, an increase in \(x_{i}\) improves candidate i’s probability of winning the election (making expression (4) positive) if: (1) the additional votes he receives offset the potential loss in contributions (relative to candidate j’s donations); (2) if, instead, the loss in votes he experiences from increasing \(x_{i}\) is compensated by the more generous contributions he receives from donors; or a combination of both cases.Footnote 14
Corollary 3
In the Downsian specification ( \(\gamma =0\) ), expression (3) simplifies to \(\frac{dp_{i}}{dx_{i}}=0\) . In the Wittman’s specification ( \(\gamma =1\) ), expression (3) reduces to
whereas expression (4) remains unchanged in both specifications.
In the Downsian specification, \(\frac{dp_{i}}{dx_{i}}=0\) indicates that candidate i moves his policy position until his probability of winning no longer increases, disregarding the specific policy he implements. In the Wittman specification, candidates focus instead on maximizing their expected policy payoffs.
Lemma 2
If\(x_{i}\le \min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) then it is strictly dominated by \(\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}+\varepsilon\)where\(\varepsilon >0\)and mrepresents the median voter’s ideal policy. If \(x_{i}\ge \max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\), then it is strictly dominated by \(\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}-\varepsilon\).
Intuitively, Lemma 2 implies that both candidates, when choosing their positions, balance the effects of both their own policy positions and the donations that those policy positions yield in order to maximize their expected payoffs.
With Lemma 2, we restrict our attention to undominated strategies \(\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}<x_{i}<\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\). Owing to the presence of corner solutions outlined in the second stage, an analytical solution is not feasible. Furthermore, our model does not satisfy Ball’s (1999a; b) assumption 4, which requires that \(p(x_{i},x_{j})=\Pi (x_{i}+x_{j})\), where \(\Pi (x_{i}+x_{j})\) is some continuous function; implying that it does not necessarily converge to a fixed point donation.
Several of the results below are driven by each candidate’s incentives to reduce his rival’s donations, as shown in the following corollary. Let us define symmetric donors as those who, when having the same ideal policy \({\hat{d}}_{k}\), experience the same utility from every policy \(x_{i}\), i.e., \(u_{k}(x_{i};{\hat{d}}_{k})=u_{l}(x_{i};{\hat{d}}_{k})\) for every \(x_{i}\).
Corollary 4
When donors are symmetric and support separate candidates, and if \(\left| x_{i}-{\hat{d}}_{k}\right| <\left| x_{i}-{\hat{d}}_{l}\right|\), then \(\frac{dk_{i}}{dx_{i}}>\frac{dl_{j}}{dx_{i}}\).
In words, Corollary 4 says that when candidate i positions himself closer to donor k’s ideal policy than donor l’s ideal policy, i.e., \(\left| x_{i}-{\hat{d}}_{k}\right| <\left| x_{i}-{\hat{d}}_{l}\right|\), a shift in policy position from candidate i causes donor l to reduce his contribution to candidate j by more than donor k’s reduction to candidate i.Footnote 15 Both donors reduce their donations to their respective candidates, but candidate j’s reductions decline by more. Subsequent sections show that candidates have incentives to reduce their rival’s donations because of the just-stated result.
4 Numerical analysis
To simulate best response functions for candidate \(i\in \{A,B\}\), our goal was to make the probability function as general as possible. Starting with the voters, we assume that their ideal policy positions are distributed according to the Beta distribution. That functional form was chosen for its general flexibility and because its support aligns with the range of our voter ideologies. Let \(B(x;\alpha ,\beta )\) represent the cumulative distribution function for the Beta distribution at point x, given shape parameters \(\alpha\) and \(\beta\).Footnote 16 If \(x_{i}<x_{j}\) (\(x_{i}>x_{j}\)), the contribution to the probability that candidate i wins the election based on their policy position relative to the voters’ ideal policy positions is \(B\left( \frac{x_{i}+x_{j}}{2};\alpha ,\beta \right)\) (\(1-B\left( \frac{x_{i}+x_{j}}{2};\alpha ,\beta \right)\)) where \(\frac{x_{i}+x_{j}}{2}\) represents the midpoint between the candidate’s policy positions. Intuitively, point \(\frac{x_{i}+x_{j}}{2}\) is located at the indifferent voter’s position along the policy spectrum. If \(x_{i}<x_{j}\) (\(x_{i}>x_{j}\)), all voters below \(\frac{x_{i}+x_{j}}{2}\) prefer the policy of candidate i (j), while all those above prefer the policy of candidate j (i).
Regarding donations, the contribution to the probability that candidate i wins the election is assumed to follow a standard normal distribution. Let N(x) represent the cumulative distribution function of that distribution. The contribution to the probability that candidate i wins the election based on their received donations is \(N(D_{i}^{\eta }-D_{j}^{\eta })\), where \(\eta \in (0,1)\) is an additional concavity parameter that assists with differentiation. Intuitively, a candidate that already receives more in donations than his rival will not benefit as much from additional donations. For simplicity, the effectiveness of donations at increasing candidate i’s probability of winning is not affected by the candidate’s political platform. However, richer modeling environments could reconsider that possibility.
The probability that candidate i wins the election is a linear combination of both contributions, i.e.,
where \(\lambda \in (0,1)\) denotes the weight of donations received relative to candidate policy position on the probability that candidate i wins the election.Footnote 17
Donors face the following utility functions,
while candidates face similar utility functions,
Those functions were chosen since they allow for bliss points, where donors and candidates maximize their utilities at exactly their most preferred policy positions, and lose utility as they move away from them.Footnote 18
The analysis was performed as follows:
-
1.
We first divided the [0, 1] interval into 1,001 equally spaced points (e.g., 0, 0.001, 0.002, and so on).Footnote 19
-
2.
We pick one value of \(x_{j}\) from the range above at a time. For each value of \(x_{j}\), we consider all 1,001 values of \(x_{i}\), calculating for each policy pair the donations made to each candidate i and j, and their corresponding expected payoffs.Footnote 20
-
3.
We identify the value of \(x_{i}\) that maximizes candidate i’s expected payoff, thus identifying candidate i’s best response to the chosen value of \(x_{j}\).
-
4.
We then repeat the process for all values of \(x_{j}\), to characterize candidate i’s best responses.
-
5.
We then repeat steps (1)–(4), picking all values of \(x_{i}\) at a time, to identify candidate j’s best response.
-
6.
We finally locate where the two best responses intersect to identify the Nash equilibrium of the donation game.
This discretization of the best responses converges to a continuous function as the number of equally spaced points approaches infinity, as described in Lemma 3.
Lemma 3
For increasingly smaller intervals between equally spaced points, the approximate equilibrium described in step (6) converges to the exact equilibrium of the underlying continuous function.
Intuitively, Lemma 3 implies that as we add more equally spaced points to our numerical simulation, our equilibrium result approaches the analytical solution to candidate i’s political position, solving Eq. (3).
Figure 2 summarizes the results of this numerical simulation.

Policy divergence as a function of c and \(\lambda\) for different values of \(\gamma\)
Figure 2a depicts policy divergence as a function of c when \(\lambda\) is held at 0.5. When \(\gamma =0\), as in the Downs (1957) specification, we obtain zero policy divergence and both candidates position at the median voter’s ideal point. That result holds regardless of the costs of donations, c, and their effectiveness, \(\lambda\). Intuitively, since candidates reduce their rival’s donations by moving closer to one another, positioning at the median voter maximizes the probability of winning when no donations are made. When \(\gamma =1\), as in the Wittman (1983) specification, policy divergence is a function of the marginal cost of donations, c, as well as their effectiveness, \(\lambda\), as depicted in Fig. 2b. Beginning from the right side of Fig. 2a, when c approaches infinity, candidates receive no donations, and respond by positioning at maximal policy divergence.Footnote 21 The result is more divergent than that in the original Wittman model because of less voter sensitivity, as explained in Wittman (1983). As c falls, candidates converge in order to deny donations to their rival. For intermediate values of c, \({\bar{c}}<c<c_{w}\), our model produces less policy divergence than in the original Wittman model as candidates continue to position closer to one another. Lastly, for values of \(c<{\bar{c}}\), no equilibrium emerges.
Figure 4b depicts policy divergence as a function of \(\lambda\), where c is held at 0.03. When \(\gamma\) is sufficiently small (\(\gamma <0.655\)), policy convergence arises for small values of \(\lambda\); which includes the case of \(\gamma =0\), where policy convergence occurs for all values of \(\lambda\), as illustrated in the figure. In contrast, when \(\gamma\) is relatively large, positive policy divergence emerges as depicted in the figure. Graphically, that result is represented in the vertical axis of Fig. 4b, where donations are ineffective (\(\lambda =0\)), and where policy divergence increases in \(\gamma\). When donations become more effective (\(\lambda >0\)), that policy divergence is attenuated, since candidates seek to position closer to their donors.Footnote 22
On the other hand, as the effectiveness of donations increases, we see candidates shift from targeting the median voter’s ideal point to the donors’ ideal points. When donors’ ideal policies are not symmetric around the median voters, shifting leads to a scenario wherein candidates’ chosen policies are skewed towards donors relative to those preferred by the voters. Intuitively, if voters’ \(\lambda\) is high, they easily are influenced by campaign contributions (spent to finance advertising, for example). In that setting, they can be convinced to vote for a candidate that receives large contributions whose policy is farther away from their own ideal policy rather than a candidate whose policy is closer to their own ideal, but receives fewer contributions. Such voter influence leads candidates to align themselves with donor preferences in order to maximize their own contributions and minimize those received by opponents.
4.1 Asymmetries
As we introduce asymmetries into the model, they take three distinct forms: asymmetries in voters’ preferences, candidates’ ideal policies, and donors’ ideal policies. Such asymmetries allow us to consider voters who favor one end of the policy spectrum over the other, or candidates and donors whose ideal policy positions no longer are equidistant from the median voter. Introducing any form of asymmetry into our model causes significant changes to models with small values of \(\gamma\), but minimal changes to models with large values of \(\gamma\).
4.1.1 Large \(\gamma\)
For models with large \(\gamma\)’s (containing the Wittman 1983 model, where \(\gamma =1\)), asymmetries change the location of the equilibrium, but do not prevent equilibria from emerging. With an asymmetric distribution of voter preferences that results in the median voter having a more leftward (more rightward) ideal policy position, candidates respond by moving their equilibrium locations rightward (leftward, respectively) to be closer to the median voter. Likewise, for asymmetric ideal policy positions among candidates or donors that result in the midpoints of their ideal policies being to the right (left) of the midpoint of the policy spectrum, both candidates respond by moving their equilibrium locations rightward (leftward, respectively). Intuitively, candidates have strong incentives to move in the same direction as shifts in the ideal policies of the voters and of donors.
Asymmetries can lead to policy misalignment between voters and candidates. Without donations, the equilibrium policy positions of both candidates reflect their own preferences, as well as those of the voters, and that relationship is maintained with the introduction of donors as long as candidates’ ideal policy positions, donor ideal policy position, and voter distribution are symmetric.Footnote 23 As \(\lambda\) increases, candidates assign more weight to donors’ ideal policy positions, and less to those of their own voting constituencies, leading them to choose equilibrium policy positions that are not reflective of the voters. We depict that relationship in Fig. 3, which illustrates the skewness of candidate policy positions away from voters on the vertical axis, measured as \(\left| x_{i}^{*}+x_{j}^{*}-2m\right|\), and the degree of asymmetry of donors on the horizontal axis, which we measure as \(\left| x_{k}+x_{l}-2m\right|\).Footnote 24

Policy misalignment
In Fig. 3, as the asymmetry between donors increases, we find that candidates shift further away from their voters’ preferred policies towards their donors. In fact, when \(\lambda =1\), candidates completely disregard voter preferences in favor of those of the donors, as voters become perfectly influenced by campaign contributions, and the election is effectively bought by the donors. The effect is not as large when \(\lambda <1\), as voters cannot be influenced as strongly by campaign contributions, requiring candidates to take their ideal policies into account as well. Lastly, when \(\lambda =0\) and we return to the case where voters cannot be influenced by campaign contributions, we observe no policy misalignment.
4.1.2 Small \(\gamma\)
When we allow for an asymmetric distribution of voters’ preferences, we observe situations in settings with small values of \(\gamma\) (including the Downs 1957 model, where \(\gamma =0\)); such distributions give rise to profitable deviations from previous policy convergence on the median voter. Since the median voter no longer is located at the midpoint between donors’ ideal policies, deviations from a candidate’s announced position induce large contributions from the donor located farther away from the median voter, while the donor located nearer to the median voter contributes little in comparison. When the marginal cost of donations, c, is low or their effectiveness, \(\lambda\), is high, it becomes profitable for candidate i to deviate from the median voter and target the larger of the two donations available. In response to that deviation, candidate j positions himself \(\varepsilon\) closer to the median voter than candidate i does, which leads to no equilibrium emerging. In summary, no stable policy positions arise in equilibrium when contributions are relatively cheap (low c), they are effective (high \(\lambda\), indicating that voters’ decisions are highly sensitive to large campaign and advertising effort), or both.
For asymmetries in donors’ or candidates’ ideal policies, we experience a similar problem in models with low values of \(\gamma\). In the case of donors’ ideal policies, again we find that the ability to attract a large contribution from the donor located farther away from the median voter causes no equilibrium to exist when either c is low or \(\lambda\) is high. Regarding asymmetries in candidates’ ideal policy positions, the effect is more subtle.Footnote 25 For candidates with extreme, yet similar ideal policy positions, a profitable deviation from the median voter emerges that is closer to the candidates’ own ideal policies. Such models also produce no equilibrium.
4.1.3 Extreme cases
For presentation purposes, we next consider three extreme cases of candidate preferences, donor preferences, or the voter preference distribution.
Candidate preferences If candidates have identical policy preferences, i.e., \({\hat{x}}_{i}={\hat{x}}_{j}\), we find that both candidates converge towards their (common) ideal policy.Footnote 26 Intuitively, since candidates are identical, they choose the same policy in equilibrium, leading donors not to contribute to either candidate. Therefore, both candidates maximize their expected utilities by positioning at their common ideal policy. Th result includes the case wherein both candidates’ ideals lie at extreme positions, such as \({\hat{x}}_{i}={\hat{x}}_{j}=0\).
Donor preferences When donors have identical policy positions, \({\hat{d}}_{k}={\hat{d}}_{l}\), we still find policy divergence between the candidates, such that the candidate whose ideal policy is closest to the donors’ (common) ideal policy locates closer to the donors and receives all donations, while the other candidate positions closer to the median voter to remain competitive by targeting voter preferences.Footnote 27
Voter distribution For extreme voter distributions, we examine two cases. First, when the voter distribution has a single peak at the very end of the policy spectrum (by setting \(\alpha =2\) and \(\beta =0.5\), or vice versa), both candidates position left (right, in the case of \(\alpha =0.5\) and \(\beta =2\)) of the median voter, as locating right (left respectively) of that position would be strictly dominated, as explained in Lemma 4. Second, we examine a voter distribution with dual peaks, such as one where voters are concentrated at the tails of the beta distribution (by setting \(\alpha =\beta =0.5\)). In that context, policy divergence increases as candidates seek to accommodate voters at the tails. Intuitively, since so few voters are located at the center of the policy line, candidates do not compete as fiercely for them, instead favoring their own ideal policies and those of the donors.
5 Donation constraints
Of interest to policy makers is the effect of constraints on donors’ ability to contribute to their respective candidates. A binding donation constraint can alter the equilibrium of our model significantly. Under certain circumstances, a donation constraint can prevent an equilibrium from emerging at all; as shown in this section. Under specifications with high \(\gamma\) (which includes the Downs 1957 specification), a binding donation constraint has no effect on the equilibrium behavior of candidates, since, as shown above, no donations are made in equilibrium to either candidate.
In contrast, in specifications with low \(\gamma\) (which captures the Wittman 1983 specification as a special case), when donors are constrained to a maximum donation, candidate behavior changes relative to the tightness of those constraints. For simplicity, we categorize equilibrium behavior when donors are constrained to three cases, with cutoff values of the donation constraint, \({\bar{k}}\) at \(k_{1}\) and \(k_{2}\), where \(k_{1}<k_{2}\).Footnote 28
Case 1\({\bar{k}}>k_{2}\). For loose donation constraints, the constraint does not bind and we obtain the same equilibrium as described in the previous section. Of interest is the fact that \(k_{2}\) significantly exceeds the unconstrained amount that donors contribute to their respective candidates in the unconstrained equilibrium, which we denote as \(k_{U}\). In other words, if \({\bar{k}}\) is set to the unconstrained donation level, candidates do not position at the unconstrained equilibrium, as explained in the next case.
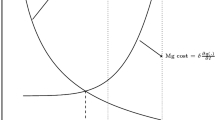
Case 2\({\bar{k}}\in [k_{1},k_{2}]\). For intermediate constraints, we find that every candidate i deviates from the unconstrained equilibrium. Figure 4 demonstrates the effect of a binding constraint on the unconstrained equilibrium.

Candidate i’s best response at different donation constraints
The left panel of Fig. 4 depicts candidate i’s payoff function and both candidates’ donation levels when donations are unconstrained. In that case, candidate i maximizes his expected payoff by positioning at the unconstrained equilibrium (located at point A), and receives the same donations as candidate j.
The center panel of Fig. 4 plots a constraint \({\bar{k}}>k_{2}\), as described in case 1. From Corollary 4, the donations that candidate j receives from donor l are more sensitive to candidate i’s position than the donations candidate i receives from donor k. Thus, as candidate i moves his position away from the unconstrained equilibrium, candidate j receives more donations than candidate i up to point B, where donor l reaches the donation constraint. At that point, candidate i can continue to move his position further left without candidate j receiving any additional donations. That movement causes candidate i’s expected payoff to increase since he is able to move closer to his own ideal position as well as receive more donations relative to candidate j (since he is constrained). In that situation, \({\bar{k}}\) is sufficiently high to allow candidate i to maximize his expected payoff by positioning himself at the unconstrained equilibrium (since point A yields a higher payoff than point C).
The right panel of Fig. 4 represents the case in which \({\bar{k}}\) is above the unconstrained donation level \(k_{U}\), but below \(k_{2}\). In that situation, since \({\bar{k}}\) is sufficiently low, candidate i reaches a higher utility at point C than he does at point A, and thus deviates from the unconstrained equilibrium. The best response functions for both candidate i and j are depicted below in Fig. 5.

Best response functions at intermediate constraints
As shown in Fig. 5, the profitable deviations from the unconstrained equilibria cause significant discontinuities to appear in the best response function, leading to no Nash equilibrium.
Case 3\({\bar{k}}<k_{1}\). For tight donation constraints, donors contribute \({\bar{k}}\) to their respective candidates, but the candidates behave as if they receive no donations at all. When every candidate i is constrained, he cannot reduce the amount of donations his opponent receives by moving his own policy position (both candidates remain constrained). Thus, the incentive to position close to one another as described in Corollary 4 does not exist, and candidates position themselves at the location that maximizes their expected policy payoffs had they not received any donations.Footnote 29
6 Public funding
Several countries (e.g., Australia and most European nations) provide publicly funded lump-sum contributions to political parties based on votes received in the previous election.Footnote 30 Public funding of political campaigns leads to potential donation advantages that are fully exogenous. If a candidate knows he has an initial advantage over his rival in donations, he may choose to position closer to his own ideal policy position.
We can adjust our model to include public funding by adding two terms to our probability of winning function. Let \(F_{i}\) and \(F_{j}\) denote the amount of public funding candidates i and j receive, which we incorporate into the probability that candidate i wins the election, Eq. (6), as follows, \(N(D_{i}^{\eta }+F_{i}^{\eta }-(D_{j}^{\eta }+F_{j}^{\eta }))\).
For compactness, we relegate the numerical results to “Appendix 4”, and discuss here the main difference with respect to the model without public funding. Specifically, we find that both candidates position closer to the ideal of the candidate with the public funding advantage; the latter capitalizes on his funding advantage by moving toward his own ideal more than his opponent does. That leads to an increase in policy divergence that remains approximately constant in the cost of donations, c, relative to the scenario with no public funding. Intuitively, if candidate i enjoys a public funding advantage over his opponent, he can use the donation advantage to offset a position less appealing to the voters, moving closer to his own ideal. Candidate j must respond to that move by moving toward candidate i’s ideal in order to mitigate his own disadvantage.
Candidates represent voter preferences better when public funding is available only if the candidate with the public funding advantage has an ideal point close to the median voter. Otherwise, candidates’ policy positions and voter preferences are misaligned, yet public funding provides weak incentives for candidates to position closer to the median voter. Since public funding is distributed according to votes in previous elections, such funds may lead the candidate who won previous electoral contests to have a substantial campaign finance advantage. If his ideal policies changed (e.g., becoming more radicalized), he could position at a more extreme policy, driving his rival to similar positions, and yet win election again.
7 Conclusion and discussion
Our results suggest that as campaign donations become either cheaper or more effective at influencing the outcome of an election, candidates position themselves closer to one another to deny donations to their rival. In addition, as asymmetries are added to the model, equilibrium policy positions shift from those that better represent voter preferences to those that better represent donor preferences as the effectiveness of donations increase. That problem is mitigated by strict donation constraints, but it comes at a cost of greater policy divergence between candidates. We summarize five main points further below.
Cheaper donations Our results suggest that policies reducing donors’ costs of contributions to political campaigns (such as making a larger fraction of them tax deductible) induces donors to be more active in contributing to either candidate. Anticipating the availability of more donations, we demonstrated that candidates’ policy positions converge, as they seek to reduce each other’s donations as much as possible. However, we also showed that when donations become extremely cheap, candidates become so concerned about monetary contributions that no stable profile of political platforms emerges. Hence, our findings indicate that making contributions to political campaigns sufficiently cheap may not induce more policy convergence, but instead destabilize political platforms (e.g., candidates who shift their positions repeatedly in response to rivals’ repositioning, without ever reaching an equilibrium).
More effective donations When voters become more influenced by large political campaigns featuring TV ads (higher \(\lambda\), the weight that campaign contributions have on winning the election relative to candidate policy positions), our results suggest that candidates shift their policy position, away from targeting the median voter toward targeting the midpoint of the donors’ preferences. Essentially, money distorts the incentives in Wittman’s model, wherein candidates care about voter’s preferences and their own ideal policy position, since now candidates also must care about donors’ ideal policies. In addition, we show that as donations become more effective in winning votes, both candidates position themselves closer to the midpoint of donors’ ideal policies, yielding more policy convergence. Therefore, electorates highly influenceable by campaigns yield more policy convergence than otherwise. That result holds, however, only when candidates place sufficiently high weight on the policy that wins the election. Otherwise, policy convergence emerges around the median voter for all values of \(\lambda\).Footnote 31
Cynical candidates Following Wittman’s results, our paper confirms that, as candidates assign larger weights to the utilities they obtain from the policy that wins the election (higher \(\gamma\)), political platforms diverge more, as candidates put less emphasis on maximizing their probabilities of winning the election and, as a result, seek to position themselves closer to their own ideal policies. That result holds even in the absence of political contributions. When donations can be made, the effect is attenuated, as candidates balance their own ideal policies with those of the donors.
Incumbent advantage For public campaign funding systems that allocate monies to candidates based on the results of the previous election, an incumbent candidate starts with a funding advantage, leveraging it to position closer to his own ideal. If previous elections are contested closely, that effect is minimal. In the case of a previous landslide victory, however, the public funding advantage granted to the incumbent leads to a significant skewing of both candidate positions closer to the incumbent’s ideal.
Limiting campaign budgets Last, our findings help shed light on the effect of setting limits on the amounts of money donors can contribute to political campaigns. We show that such constraints yield different results, depending on the severity of the constraint. When campaign contributions are constrained significantly, our findings imply more policy divergence between candidates. However, the midpoint of their policy preferences is now closer to the median voter, so those preferences can be interpreted as becoming more aligned with voter preferences. In contrast, when constraints are relatively lax, our results indicate that candidates’ positions do not achieve equilibrium. Therefore, if the proponents of campaign finance reform seek to minimize policy divergence among candidates, donors must remain unconstrained. On the contrary, if the proponents’ objective is to align candidates’ with those of the voter distribution, a low donation threshold is optimal. In summary, aligning candidate policies with those of the median voter comes at a cost of wider policy divergence.
Further research Our work leads to several avenues for future research. Many democratic countries elect their governments from slates of more than two candidates; adding additional candidates to the model would allow for more empirically robust results. In addition, we consider a one-dimensional policy spectrum, along which candidates typically chose among many different policy positions when forming their campaign strategies. Following Ball (1999a) and other contributions to the literature, we could consider a probabilistic voting model and, in addition impose a specific utility function on those agents. Doing so could help us evaluate equilibrium utility and welfare, which ultimately can lead to understanding of whether campaign contribution constraints are welfare improving or not under some conditions. Furthermore, our paper assumes that candidates can commit credibly to the policy announcements made in the voting game’s first stage. However, an alternative model could allow for commitment problems, so candidates can revise their political announcements after donors submit their contributions. In that setting, donors would submit contribution menus, as in Grossman and Helpman (2001), and every candidate i would respond with policy \(x_{i}(D_{i},D_{j})\). Lastly, we consider the effectiveness of campaign contributions, \(\lambda\), to be uniform across all voters and candidates. For asymmetric values of \(\lambda\), we could find situations wherein one candidate benefits from donations much more than the other.
Notes
Campaign spending levels in US presidential elections increased by 45% ($687 million to $1 billion) from 2004 to 2008, and again by 40% ($1 billion to $1.409 billion) from 2008 to 2012. In the UK’s parliamentary elections, in contrast, donations declined 32% ($36.5 million to $24.9 million) from 2005 to 2010 and subsequently increased by 12% ($24.9 million to $28 million) from 2010 to 2015.
For an example of an election with three candidates, see Evrenk and Kha (2011).
Additional work by Barro (1973) examines how candidates’ motivations may not coincide with those of their electoral base.
Those results were extended in Calvert (1985), who demonstrated the assumptions under which policy convergence occurs. Empirical work by Morton (1993) tests the predictions and suggests that policy divergence occurs, but to a lesser extent than the theoretical prediction. Work by Zakharov and Sorokin (2014) suggests that the results also hold for a wide array of voting probability functions.
Candidates’ announcements of policy positions might not be credible to donors or voters. Work by Alesina (1988) and Aragonès et al. (2007), however, suggest that when candidates face repeated elections, voters (and, by extension, donors) recall when implemented and announced policy positions differ, and form their beliefs on a candidate’s true position accordingly. As a result, candidates announce the policy they intend to implement and the announcements can be considered credible. We assume that candidates cannot shirk on their announced positions, but our setting can be extended to models wherein candidates build their reputation.
Work by Hinich and Munger (1994) explores campaign contributions as a hindrance to a rival rather than a benefit to a preferred candidate.
Empirical work estimates the effects of campaign contribution limits. Jacobson (1978) and Coate (2004) focus on how contribution limits influenced the margins of victory between candidates (namely, an incumbent against a challenger). Our model, however, examines the effect of contribution limits on equilibrium positioning, rather than on the margin of victory.
In 2012, Mitt Romney faced a long primary challenge, which required him to spend 87% of the $153 million raised through June 2012, when he clinched the Republican nomination. In contrast, incumbent President Barack Obama spent 69% of the $303 million that he had raised over the same period. To generate additional funds, Romney courted donors who had either supported his rivals in the primary election or stayed out completely. Those donors were able to observe Romney’s policy positions long before ever offering him their aid.
Intuitively, both donors benefit from the contribution made to the supported candidate, and a situation similar to a public good arises, wherein donors free ride on each others’ contributions. In particular, every dollar donated to candidate i by donor l reduces donor k’s contribution by exactly one dollar.
Intuitively, contributions from one donor are detrimental to the other donor’s preferred election outcome, and the other donor has incentive to contribute further to his own candidate to protect his interests in the election.
Our model assumes a linear combination of the Downsian and Wittman utilities. While that assumption restricts the preferences of the candidates, the convexity of each candidate’s preferences is preserved. The authors wish to thank an anonymous referee for bringing that point to our attention.
Many studies consider functions such as \(v_{i}(x_{i})=-A(x_{i}-{\hat{x}}_{i})^{2}\), where \(A>0\), which is negative everywhere except at its max when \(x_{i}={\hat{x}}_{i}\), i.e., the implemented policy coincides with candidate i’s ideal, where \(v_{i}({\hat{x}}_{i})=0\).
In the first term on the right-hand side, an increase in \(x_{i}\) corresponds to candidate i moving closer to (away from) the median voter, thus making his policy position more (less) attractive to voters and increasing (decreasing) the probability that he wins the election. The second term depicts how candidate i’s policy position affects the contributions he receives from each donor. We know that \(\frac{\partial p_{i}}{\partial D_{i}}>0\) since an increase in donations to candidate i increases his chances of winning the election. The signs of \(\frac{dk_{i}^{*}}{dx_{i}}\) and \(\frac{dl_{i}^{*}}{dx_{i}}\) depend on candidate i’s policy position relative to the ideal policies of donors k and l, respectively.
Since candidate i was relatively close to donor k’s ideal policy position, and donors’ utility is concave by definition, candidate i’s shift in \(x_{i}\) causes only a small reduction in donor k’s expected utility, but yields to donor l a much larger gain in his expected utility.
Utilizing \(\alpha\) and \(\beta\), we can simulate several different population distributions. When \(\alpha =\beta >1\), we obtain a symmetric population of voters whose mean is 0.5 and are more concentrated towards the center of the distribution. Alternatively, when \(\alpha =\beta <1\), we obtain a symmetric population of voters whose mean is 0.5 but are more concentrated in the tails of the distribution. With \(\alpha>\beta >1\), we obtain a distribution that has a mean above 0.5 and has a negative skew. Lastly, with \(\beta>\alpha >1\), we obtain a distribution that has a mean below 0.5 and has a negative skew.
The setup is a significant departure from Ball’s (1999a) original model, which did not consider the effectiveness of donations as a linear combination, but rather as a parameter (Ball refers to it as \(\gamma\)). We choose (5) as it guarantees that the probability that candidate i wins the election falls strictly between 0 and 1.
The specification can lead to convexity issues. While we are unable to prove that the set of all Downsian and Wittman utilities are convex analytically, we examined several instances within those sets numerically. For the present analysis, all donation levels and the position of candidate j, \(x_{j}\), were fixed, and only the values of candidate i’s policy position, \(x_{i},\) and the linear combination between the Downsian and Wittman specifications, \(\gamma\), were varied. We then calculated the resulting payoffs for candidate i. Generally, we find that candidate i’s best response function exhibits discontinuities only when \(\gamma\) is extremely small, as described later in this section, or in the special case in which both candidates i and j have the same ideal policy position. In those cases, we can show numerically that our model predicts policy convergence. Otherwise, candidate i’s best response function is continuous and the set of Downsian and Wittman utilities is convex around candidate i’s best response.
To approximate continuity, the numerical analysis also was performed using 2,001 and 5,001 equally spaced points, confirming that the results are unaffected. We then reproduced our simulations by drawing 1,001 points randomly on the [0, 1] interval, showing that the results essentially were identical to those using equally spaced points.
For instance, if the parameters are \(\gamma =1\), \(\lambda =0.5\), \(w=0\), \(\alpha =\beta =2\), \({\hat{d}}_{k}=0.2\), \({\hat{d}}_{l}=0.8\), \({\hat{x}}_{i}=0.3\), \({\hat{x}}_{j}=0.7\), \({\bar{k}}={\bar{l}}=1\), \(\eta =0.5\) and \(c=0.03\), if we start with \(x_{j}=0.1\), candidate i’s largest payoff occurs at \(x_{i}=0.3\), where his payoff becomes \(-0.0053\).
In that situation, candidate i positions between his own ideal policy, \(\hat{x_{i}},\) and the location of the median voter, but prefers positioning closer to \(\hat{x_{i}}\).
Intuitively, with symmetry, donor preferences also align with voter preferences.
The asymmetry measurement is derived from the difference between each position and that of the median voter, m, \(\left| x_{k}-m-(x_{l}-m)\right|\) which simplifies to our expression. Notably, when policy positions are equidistant from the median voter, the expression evaluates to zero.
When \(\gamma =0\), we return to policy convergence, as candidate policy preferences do not impact the Downsian equilibrium.
That is the only case of complete policy convergence in the Wittman specification we found.
The candidate receiving donations is more likely to win the election under such circumstances. The candidate who positions closer to the median voter (and receives no donations), however, still has a positive probability of winning. That scenario is reminiscent of the 1896 US presidential election won by William McKinley, an industrialist with strong backing by business interests. His opponent, William Jennings Bryan, adopted policy positions that were popular among the mass of voters, but was unable to raise money from potential donors. McKinley raised $3.5 million to Bryan’s $0.5 million, which led to McKinley winning the election.
For calculated values of \(k_{1}\) and \(k_{2}\), refer to the selected simulation results table in “Appendix 3”.
Which, as described in the numerical analysis section, produces more policy divergence than in the original Wittman (1983) model, but the candidates do not display the skewness towards donors’ ideal policies because \(\lambda >0\).
Other countries imposing limits on campaign contributions are Uruguay, Belgium, Finland, France, Greece, Ireland, Poland, Japan and South Korea; with most limiting individual donations below $8000. Countries limiting political parity spending include Canada, Austria, Belgium, Czech Republic, France, Greece, Hungary, Ireland, Israel, Italy, Poland, Japan, New Zealand, and South Korea.
Of note, intermediate values of \(\gamma\), the weight that every candidate places on policy implementation relative to the probability that they win the election, exist that yield policy convergence only for low values of \(\lambda\). For example, when \(\gamma =0.5\) with our assumed parameters, policy convergence occurs for \(\lambda <0.74\), but policies diverge slightly for values above that value.
At these parts of the best response function, candidate i obtains a higher probability of winning the election by distancing himself from his opponent and enabling donors to contribute to his own campaign (as donors will contribute approximately zero when candidates position next to one another).
Term \(N(D_{i}^{\eta }-D_{j}^{\eta })\) is our normally distributed contribution to the probability that candidate i wins the election based on their received donations.
As described in Propositions 3B and 4B in Wittman’s (1983) paper. The net effect of an increase in \(\lambda\) is ambiguous, as it strongly depends on the symmetry of ideal policy positions, but in general, as \(\lambda\) increases, candidates have stronger incentives to deny donations to their opponent by moving closer to one another; as described in Corollary 4.
We also find that for every cost \(c<{\bar{c}}\), no Nash equilibrium exists. Intuitively, as donations become extremely cheap, candidate behavior becomes erratic. Candidates receive large donations for even small deviations from their current positions, and constantly vie for the most donations from their respective donors. This causes no equilibrium to emerge. As a note, for large donations, the concavity property of our normal distribution also breaks down, which could be driving this result.
In our numerical analysis,\(\gamma =1\), \(\lambda =0.5\), \(w=0\), \(\alpha =\beta =2\), \({\hat{d}}_{k}=0.2\), \({\hat{d}}_{l}=0.8\), \({\hat{x}}_{i}=0.3\), \({\hat{x}}\), \(\eta =0.5\), we obtain that for the value of \(c_{w}=0.053\), the Wittman model and the Wittman specification of our model yield the same equilibrium policy positions for both candidates.
This includes extreme cases where candidates’ ideal policies are at the endpoints of the policy line, \({\hat{x}}_{i}=0\) and \({\hat{x}}_{j}=1\).
Once again, this also holds for extreme ideal policies, \({\hat{x}}_{k}=0\) and \({\hat{x}}_{l}=1\).
From disclosure website opensecrets.org, data obtained suggests that no major super PAC supports multiple candidates in the same election. This holds true for several elections, dating back to before 2008.
References
Adamany, D. (1977). Money, politics, and democracy: A review essay. The American Political Science Review (1927), 71(1), 289–304.
Alesina, A. (1988). Credibility and policy convergence in a two-party system with rational voters. The American Economic Review, 78(4), 796–805.
Aragonès, E., Postlewaite, A., & Palfrey, T. (2007). Political reputations and campaign promises. Journal of the European Economic Association, 5(4), 846–884.
Austen-Smith, D. (1987). Interest groups, campaign contributions, and probabilistic voting. Public Choice, 54(2), 123–139.
Ball, R. (1999a). Opposition backlash and platform convergence in a spatial voting model with campaign contributions. Public Choice, 98(3), 269–286.
Ball, R. (1999b). Discontinuity and non-existence of equilibrium in the probabilistic spatial voting model. Social Choice and Welfare, 16(4), 533–555.
Barro, R. (1973). The control of politicians: An economic model. Public Choice, 14(1), 19–42.
Bowen, L. (1994). Time of voting decision and use of political advertising: The Slate Gorton-Brock Adams senatorial campaign. Journalism Quarterly, 71(3), 665–675.
Calvert, R. (1985). Robustness of the multidimensional voting model: Candidate motivations, uncertainty, and convergence. American Journal of Political Science, 29(1), 69–95.
Coate, S. (2004). Political competition with campaign contributions and informative advertising. Journal of the European Economic Association, 2(5), 772–804.
d’Aspremont, C., & Gabszewicz, J. (1979). On hotelling’s ‘stability in competition’. Econometrica, 47(5), 1145–1150.
Downs, A. (1957). An economic theory of democracy. New York: Harper.
Evrenk, H., & Kha, D. (2011). Three-candidate spatial competition when candidates have valence: Stochastic voting. Public Choice, 147(3–4), 421–438.
Goldstein, K., & Freedman, P. (2000). New evidence for new arguments: Money and advertising in the 1996 Senate elections. Journal of Politics, 62, 1087–1108.
Gordon, B. R., & Hartmann, W. R. (2013). Advertising effects in presidential elections. Marketing Science, 32(1), 19–35.
Grossman, G., & Helpman, E. (2001). Special interest politics. Cambridge, MA: MIT.
Hare, C., & Poole, K. (2014). The polarization of contemporary American politics. Polity, 46(3), 411–429.
Herrera, H., Levine, D., & Martinelli, C. (2008). Policy platforms, campaign spending and voter participation. Journal of Public Economics, 92(3), 501–513.
Hinich, M., & Munger, M. (1994). Ideology and the theory of political choice. Ann Arbor: University of Michigan Press.
Hotelling, H. (1929). Stability in competition. The Economic Journal, 39(153), 41–57.
Jacobson, G. (1978). The effects of campaign spending in congressional elections. The American Political Science Review (1927), 72(2), 469–491.
Kaid, L. L. (1982). Paid television advertising and candidate name identification. Campaigns and Elections, 3, 34–36.
McKelvey, R. (1975). Policy related voting and electoral equilibrium. Econometrica, 43(5), 815–843.
Morton, R. (1993). Incomplete information and ideological explanations of platform divergence. American Political Science Review, 87, 382–392.
Ortuno-Ortín, I., & Schultz, C. (2005). Public funding of political parties. Journal of Public Economic Theory, 7(5), 781–791.
Poole, K., & Rosenthal, H. (1984). The polarization of American politics. The Journal of Politics, 46(4), 1061–1079.
Shaw, D. R. (1999). The effect of TV ads and candidate appearance on statewide presidential votes. 1988–1996. American Political Science Review, 93, 345–362.
Stratmann, T. (2009). How prices matter in politics: The returns to campaign advertising. Public Choice, 140(3–4), 357–377.
Welch, W. (1974). The economics of campaign funds. Public Choice, 20(1), 83–97.
Welch, W. (1980). The allocation of political monies: Economic interest groups. Public Choice, 35(1), 97–120.
West, D. (2005). Air wars: Television advertising in election campaigns, 1952–2004 (4th ed.). Washington: CQ Press.
Wittman, D. (1983). Candidate motivation: A synthesis of alternative theories. The American Political Science Review, 77(1), 142–157.
Zakharov, A., & Sorokin, V. (2014). Policy convergence in a two-candidate probabilistic voting model. Social Choice and Welfare, 43(2), 429–446.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
We thank the Associate Editor, Keith Dougherty, and two anonymous referees for their helpful comments and suggestions. We are also grateful to Ron Mittelhammer, Raymond Batina, Ana Espinola-Arredondo and all seminar participants at Washington State University.
Appendix
Appendix
1.1 Appendix 1: Further details on the numerical simulation
Downs (1957) specification (\(\gamma =0\)). Under the Downs (1957) specification, candidates seek to solely maximize their probability of winning the election. By setting both \(\gamma =0\) and \(\lambda =0\), we obtain the original model and result proposed by Downs in that each candidate maximizes his probability of winning the election by positioning himself at exactly the median voter. For values of \(\lambda >0\), campaign contributions also determine the probability of winning the election, and our results are presented in Fig. 6 below.

Downsian specification with \(\lambda =0\) and \(\lambda >0\), respectively
Figure 6a plots the results in the original Downs (1957) model since \(\lambda =0\). The best response for either candidate i is to position himself \(\varepsilon >0\) closer towards the median voter relative to his opponent. This behavior continues until both candidates converge at the median voter and have even odds of winning the election. In Fig. 6b, we have the Downsian specification of our model where \(\lambda >0\). Similar to the Downsian model, our model has every candidate i position himself closer to the median voter’s ideal position than his opponent, where the best response is to position \(\varepsilon >0\) closer to the median voter for positions near the median voter. As candidate i’s opponent deviates significantly from the median voter’s ideal policy position, however, candidate i’s best response is now to increase the distance between his own position and that of his opponent (flatter best response function when \(x_{j}\) is either high or low). Intuitively, at the more extreme points of the best response function, the ability to increase his probability of winning by targeting voter preferences diminishes quickly due to the concavity of the probability function.Footnote 32
The equilibrium results of the original Downsian model and the Downsian specification of our model remain the same. Thus, the only Nash equilibrium we find is \(x_{i}^{*}=x_{j}^{*}=m\), the location of the median voter, and \(k_{i}^{*}=k_{j}^{*}=l_{i}^{*}=l_{j}^{*}=0\), as no donor has any incentive to donate to either candidate. Intuitively, in the Downsian specification of our model, as candidates approach the median voter donations to each candidate effectively disappear. Every candidate has incentive to position at the median voter to maximize his vote share, as well as incentive to deny campaign contributions to his opponent, as described in Corollary 4. Furthermore, lowering c, the marginal cost of donations only exacerbates this effect.
Wittman (1983) specification (\(\gamma =1\)). In the Wittman (1983) specification, instead of maximizing the probability of winning the election, every candidate i maximizes his expected policy outcome. As a result, candidates position themselves closer to their ideal policy position rather than the median voter’s ideal (as in the Downs (1957) model). When we set \(\gamma =1\) and \(\lambda =0\), we can obtain both the original model and results as presented by Wittman. Allowing for donations to affect the probability of winning the election (\(\lambda >0\)), we obtain the results in Fig. 7.

Wittman specification with \(\lambda =0\) and \(\lambda >0\), respectively
In Fig. 7a, we have the original Wittman (1983) model where \(\lambda =0\). Every candidate i positions himself close to his ideal policy position, i.e., the best response function \(x_{i}(x_{j})\) lies close to \({\hat{x}}_{i}\). As candidate j positions himself closer to the median voter, candidate i responds by moving rightward, but at a much slower rate than seen in the Downs (1957) specification (flatter best response function). This leads to an equilibrium where candidate policy positions diverge from the median voter and from their own ideal policies. Figure 7b contains the Wittman specification of our model where \(\lambda >0\). The key difference between the two models happens when \(x_{j}\) is relatively high. In this case, the best response of candidate i is to remain even closer to his own ideal policy position since candidate j positions himself significantly to the right of the median voter; see flat segment in the right-hand side of \(x_{i}(x_{j})\). The intuition is similar to that of the Downsian specification, as candidate i receives a larger benefit from campaign contributions rather than targeting voter preferences when his opponent positions himself at extreme locations.
The location of our equilibrium under the Wittman (1983) specification with donations can vary relative to the equilibrium of Wittman’s model, itself. Intuitively, by introducing donations we both lower voter sensitivity, and introduce bias for whichever candidate receives more donations, as described in Wittman’s (1983) paper. We can reproduce Wittman’s results by setting an inverse relationship between Wittman’s voter sensitivity parameter s and our donation effectiveness parameter, \(\lambda\); and a proportional relationship between Wittman’s bias parameter B and a combination of our \(\lambda\) and \(N(D_{i}^{\eta }-D_{j}^{\eta })\) terms.Footnote 33 As \(\lambda\) increases, voter sensitivity decreases, which causes candidates to move closer to their own ideal policy positions; and the bias increases in magnitude, which causes candidates to move towards whichever candidate the bias favors.Footnote 34
As the marginal cost of donations, c, decreases, donors contribute more to their preferred candidates. This influx of donations causes both candidates to position closer to each other, since each candidate is able to deny donations to his opponent; as explained in Corollary 4. Due to the concavity of the donors’ utility functions, having a candidate that is positioned farther away from the donor move closer entails a much larger increase in utility than having a candidate that is close to the donor move away. Thus, candidate i can significantly reduce the donations that candidate j receives by moving slightly closer to candidate j’s policy position while only experiencing a slight decrease in the amount of donations that he receives.Footnote 35
In summary, when the marginal cost of donations, c, is sufficiently high \(c>c_{w}\) (low \(c<c_{w}\)), our results predict less (more) convergence than in Wittman’s model.Footnote 36 When \(\lambda =0\) (as in the original Wittman model), candidates position between their own ideal policy positions and the ideal policy position of the median voter. As \(\lambda\) increases, candidates put less weight on the location of the median voter’s ideal policy and more weight on the source of the bias, the donors’ ideal policy position. At the extreme case of \(\lambda =1\), candidates disregard the median voter’s ideal policy position entirely when they receive donations, and position themselves between their own ideal position and the midpoint of the donors’ ideal policies, \(\frac{{\hat{d}}_{k}+{\hat{d}}_{l}}{2}\).
Other effects are similar to those described in Wittman (1983). If the ideal policy position of either candidate moves rightward (leftward), both candidates move rightward (leftward) in equilibrium.Footnote 37 Intuitively, if candidate j’s ideal policy position moves rightward, he positions closer to it, which induces candidate i to also move rightward to receive more votes and to deny candidate j additional donations. Likewise, if either donor moves his most preferred policy position rightward (leftward), both candidates move their equilibrium policy position rightward (leftward).Footnote 38
Mixed specification (\(0<\gamma <1\)). Using a mixed specification, we obtain results that fall between the Downs (1957) and Wittman (1983) specifications. When \(\gamma\) is low (\(\gamma <0.655\) in our example), we find that policy convergence at the median voter occurs. For values of \(\gamma\) above this threshold, policy positions diverge until they reach those at the Wittman (1983) specification when \(\gamma =1\). Interestingly, the best response functions for both candidates show properties of both the Downsian and Wittman models as shown in Fig. 8. Their behavior depends on each candidate’s location relative to their ideal position.

Mixed specification with \({\hat{x}}_{i}<m<{\hat{x}}_{j}\) for low and high values of \(\gamma\)
Without loss of generality, when candidate i prefers a leftward policy position than the median voter and candidatej prefers a rightward policy position than the median voter, i.e., \({\hat{x}}_{i}<m<{\hat{x}}_{j}\), for low values of \(x_{j}\), candidate i’s best response is to target the voters consistent with the Downsian model as seen in Fig. 8a, and he positions himself \(\varepsilon >0\) closer to the median voter than candidate j. This occurs up until a policy point above the median voter, where candidate i no longer moves his position rightward in response to a rightward move in candidate j ’s position. At this point, candidate i’s expected policy payoff dominates his preference to maximize his probability of winning the election, and he behaves more in line with the Wittman model. An analogous argument applies for candidate j’s best response to candidate i’s position. In this case, both candidates position themselves at exactly the median voter in equilibrium, and policy convergence occurs. In equilibrium, neither donor contributes to either candidate’s campaign, and the election is decided by a coin flip.
In Fig. 8b, we have the case where \(\gamma\) is large enough to induce policy diversion. The major difference in this case is that both candidates shift from maximizing their probability of winning the election to maximizing their expected policy payoff at a position below (above for candidate j) the median voter. This leads to behavior more in line with the Wittman specification rather than the Downsian, where a single Nash equilibrium in pure strategies exists where candidates select different policy positions, ones that are closer to their most ideal position.
1.2 Appendix 2: Comparing candidate positions against donor’s ideals
Figure 9a plots candidate equilibrium position as a function of the marginal cost of donations, c. Starting from the right side of the figure, when c is large, every candidate receives fewer donations and has little incentive to position closer to his opponent in order to deny him of those donations. As a result, policy divergence is higher with large values of c. As c decreases, each candidate positions closer to his rival, as he has strong incentives to deny his rival of the additional donations that are available due to the reduced marginal cost.

Equilibrium candidate positions as a function of c and \(\lambda\) when \(\gamma =1\)
Figure 9b depicts candidate equilibrium position as a function of the effectiveness of donations, \(\lambda\). In this figure, candidate i has an ideal policy position closer to the midpoint between the donors’ ideal policy position (donors are slightly asymmetric towards candidate i), and thus, candidate i responds quickly to an increase in \(\lambda\) by moving closer to his own ideal policy position. Candidate j follows at a slower rate, increasing policy divergence for low values of \(\lambda\). As \(\lambda\) increases further, candidate i responds less to further increases (his line becomes flatter), and candidate j is able to deny more donations to his rival. For high values of \(\lambda\), we observe decreased policy divergence.
1.3 Appendix 3: Candidate positions with donation constraints
For parameter values of \({\hat{d}}_{k}=0.2\), \({\hat{d}}_{l}=0.8\), \({\hat{x}}\), \({\hat{x}}_{j}=0.7\), \(\eta =0.5\), \(\lambda =0.5\), and \(a=\beta =2\), the following results were obtained:
\({\bar{k}}={\bar{l}}\) | Equilibrium Values \((x_{i}^{*},x_{j}^{*})\) | ||
|---|---|---|---|
\(c=0.01\) | \(c=0.02\) | \(c=0.03\) | |
0.8 | (0.346, 0.654) | (0.346, 0.654) | (0.346, 0.654) |
0.9 | (0.346, 0.654) | (0.346, 0.654) | − |
1.2 | (0.346, 0.654) | (0.346, 0.654) | − |
1.3 | (0.346, 0.654) | (0.346, 0.654) | (0.387, 0.613) |
1.5 | (0.346, 0.654) | (0.346, 0.654) | (0.387, 0.613) |
1.6 | (0.346, 0.654) | − | (0.387, 0.613) |
2.1 | (0.346, 0.654) | − | (0.387, 0.613) |
2.2 | − | − | (0.387, 0.613) |
2.5 | − | − | (0.387, 0.613) |
2.6 | − | (0.398, 0.602) | (0.387, 0.613) |
4.1 | − | (0.398, 0.602) | (0.387, 0.613) |
4.2 | (0.422, 0.578) | (0.398, 0.602) | (0.387, 0.613) |
10 | (0.422, 0.578) | (0.398, 0.602) | (0.387, 0.613) |
For \(c=0.01\), the low marginal cost of donation allows donors to contribute large donations to their respective candidates. When donation constraints are set low, \({\bar{k}}<k_{1}=2.1\) in this case, candidates behave as if no donations are received and position themselves at \((x_{i}^{*},x_{j}^{*})=(0.346,0.654)\). For values of \(k_{1}<{\bar{k}}<k_{2}=4.2\), no equilibrium exists, as candidates leverage constraints on their opponents to position closer to their own ideal policy positions. Lastly, when \({\bar{k}}\), candidates act as if they were unconstrained and position at \((x_{i}^{*},x_{j}^{*})=(0.422,0.578)\).
As we increase c to 0.02 or 0.03, we find that the values of \(k_{1}\) and \(k_{2}\) decrease. For example, when \(c=0.02\), the higher marginal cost of donations causes donors to reduce their contribution levels, and thus the breakpoints for each scenario must also decrease. We find that \(k_{1}=1.5\) and \(k_{2}=2.6\) when \(c=0.02\); and \(k_{1}=0.9\) and \(k_{2}=1.3\) when \(c=0.03\). Of note, the fully constrained equilibrium does not change when\({\bar{k}}<k_{1}\) regardless of the value of c since candidates behave as if they receive no contributions, but as c decreases, the unconstrained equilibria show reduced policy divergence.
1.4 Appendix 4: Public funding numerical results
The presence of public funding in our model behaves qualitatively similar to adding an asymmetry. For example, when \(\gamma\) is low (as in the Downsian Specification), equal public funding levels among candidates retains our equilibrium at the median voter. For even small public funding donation advantages, however, we arrive at situations where no equilibrium in pure strategies exists, much like the cases described in the asymmetry section.
In contrast, when \(\gamma\) is high (as in the Wittman Specification), a public funding advantage does not prevent the emergence of an equilibrium in pure strategies. Under these conditions, both candidates again behave as if an asymmetry were present, positioning closer to the candidate with the public funding advantage, the results of which are shown below in Fig. 10.

Equilibrium candidate positions as a function of \(F_{i}\) and \(\lambda\) when \(\gamma =1\)
Figure 10a depicts candidate equilibrium positions as a function of \(F_{i}\) while \(F_{j}\) is held constant at 0.5 and \(\lambda\) is held constant at 0.5. For comparison purposes, we denote point \({\bar{x}}_{i}\) as candidate i’s equilibrium policy position without public funding. As seen in the figure, for values of \(F_{i}<0.5\), equilibrium positions are skewed rightward, towards candidate j’s ideal. As \(F_{i}\) increases, however, the skewness at first disappears at \(F_{i}=F_{j}=0.5\), and then becomes skewed leftward as \(F_{i}\) increases further above 0.5. Figure 10b depicts candidate equilibrium positions as a function of \(\lambda\) with \(F_{1}=0.8\) and \(F_{2}=0.5\). In this situation, we again observe the increased policy convergence as \(\lambda\) increases, as seen in Fig. 4b (as an increase in \(\lambda\) increases the effect of private, as well as public donations). However, we do observe an asymmetry in favor of candidate i, due to their advantage in public funding. As \(\lambda\) increases, candidates shift their priorities from the voters to the donors, but candidate i’s public donation advantage also shifts both candidates more towards candidate i’s ideal policy.
1.5 Proof of Proposition 1
Lemma 1
Donor k ’s equilibrium donation to candidate i , \(k_{i}\) , solves
Intuitively, donor k increases his contribution \(k_{i}\) until his marginal benefit from further donations (left-hand side of Eq. (6)) coincides with his marginal cost (right-hand side of (6)). Note that the marginal benefit captures the additional probability that candidate i wins the election thanks to larger donation, \(\frac{dp_{i}}{dD_{i}}\ge 0\), and the utility gain that donor k obtains when candidate i wins the election to candidate j, \(u_{k}(x_{i};{\hat{d}}_{k})-u_{k}(x_{j};{\hat{d}}_{k})\). Needless to say, if donor k prefers candidate j winning the election then \(u_{k}(x_{i};{\hat{d}}_{k})<u_{k}(x_{j};{\hat{d}}_{k})\), and the left-hand side becomes unambiguously negative, ultimately yielding a corner solution where donor k does not contribute to candidate i’s campaign in equilibrium. This result suggests that ever donor k will only contribute to the candidate yielding the highest utility; as we prove in the next lemma.
Lemma 2
In equilibrium, every donor k contributes to one candidate at most.
Proof
Assume that donor k contributes to both candidates A and B, i.e., \(k_{i},k_{j}>0\) and thus Eq. (6) binds with equality for candidates i and j, i.e.,
Setting Eqs. (7) and (8) equal to one another and simplifying yields
which cannot hold, since the left side of Eq. (9) is positive, while the right side is negative. Therefore, donor k’s contribution to at least one of the candidates must equal zero. \(\square\)
Intuitively, if donor k contributes to candidate i, he does so to increase the probability that candidate i wins the election. On the contrary, any contribution that donor k makes to the other candidate \(j\ne i\) lowers the probability that candidate i wins the election. Thus, contributions to both candidates are counterproductive, and every donor k only donates to the candidate whose policy position yields him the highest utility level.Footnote 39 As a remark, note that if both policy positions yield the same utility for donor k, \(u_{k}(x_{i};{\hat{d}}_{k})=u_{k}(x_{j};{\hat{d}}_{k})\) then his marginal benefit of contributing to candidate i (left-hand side of (2)) becomes nil, inducing no donations to either candidate, i.e., \(k_{i}^{*}=0\) for all i.
Lemmas 1 and 2 allow us to characterize the solution of the second stage of the game into several cases, as detailed in Proposition 1. \(\square\)
1.6 Proof of Corollary 1
First, we show that \(\frac{dk_{i}^{*}}{dl_{i}}=-1\). Differentiating Eq. (2) with respect to \(l_{i}\) yields
where the only value that can satisfy the above equation is \(\frac{dk_{i}^{*}}{dl_{i}}=-1\).
Next, we show that \(\frac{dk_{i}}{dl_{j}}>0\). Using equation (2) with respect to \(k_{i}^{*}\) and \(l_{j}^{*}\), we have
Setting these two equations equal to one another and rearranging terms yields
Using the implicit function theorem,
0where the signs of \(u_{k}(x_{i})-u_{k}(x_{j})\) and \(u_{l}(x_{i})-u_{l}(x_{j})\) are by definition and the signs of \(\frac{d^{2}p}{dD_{i}^{2}}\) and \(\frac{d^{2}p}{dD_{j}^{2}}\) are due to the concavity and convexity, respectively of \(D_{i}\) and \(D_{j}\) on p. \(\square\)
1.7 Proof of Corollary 2
Differentiating Eq. (2) with respect to \(x_{i}\) and \(x_{j}\) yields
Since the probability that candidate i wins the election is increasing and concave, we know that \(\frac{dp}{dD_{i}}>0\) and \(\frac{d^{2}p}{dD_{i}^{2}}<0\). Likewise, if donor k is contributing to candidate i, \(u_{k}(x_{i})-u_{k}(x_{j})>0\). The sign of \(\frac{du_{k}(x_{i})}{dx_{i}}\)\(\left( \frac{du_{k}(x_{i})}{dx_{j}}\right)\) can be determined by candidate i’s (j’s) position relative to donor k’s ideal position. If \(x_{i}<x_{k}\) (\(x_{j}<x_{k}\)), a rightward move in candidate i’s (j’s) policy position will entail an increase in the utility that donor k receives from that position, and thus \(\frac{du_{k}(x_{i})}{dx_{i}}>0\)\(\left( \frac{du_{k}(x_{i})}{dx_{j}}>0\right)\). On the contrary, if \(x_{i}>x_{k}\) (\(x_{j}>x_{k}\)), a rightward move in candidate i’s (j’s) policy position will entail an decrease in the utility that donor k receives from that position, and thus \(\frac{du_{k}(x_{i})}{dx_{i}}<0\)\(\left( \frac{du_{k}(x_{i})}{dx_{j}}<0\right)\). This leaves \(\frac{dk_{i}^{*}}{dx_{i}}\)\(\left( \frac{dk_{i}^{*}}{dx_{j}}\right)\) as the only unknown sign in the above equation. In order for the equation to hold with equality, it is necessary that \(\frac{dk_{i}^{*}}{dx_{i}}\)\(\left( \frac{dk_{i}^{*}}{dx_{j}}\right)\) have the same (opposite) sign as \(\frac{du_{k}(x_{i})}{dx_{i}}\)\(\left( \frac{du_{k}(x_{i})}{dx_{j}}\right)\), i.e., \(\frac{dk_{i}^{*}}{dx_{i}}>0\)\(\left( \frac{dk_{i}^{*}}{dx_{j}}<0\right)\) if \(x_{i}<x_{k}\) (\(x_{j}<x_{k}\)) and \(\frac{dk_{i}^{*}}{dx_{i}}<0\)\(\left( \frac{dk_{i}^{*}}{dx_{j}}>0\right)\) if \(x_{i}>x_{k}\) (\(x_{j}>x_{k}\), respectively).\(\square\)
1.8 Proof of Lemma 2
Equilibrium location pairs \((x_{i}^{*},x_{j}^{*})\) must satisfy Eq. (4) for both candidates, which will depend on the signs of each term in those equations. Unambiguously, we know that \(\frac{dp_{i}}{dD_{i}}>0\), since by assumption, if candidate i receives more donations from either candidate, their subjective probability of winning the election will increase. Likewise, we have \(\frac{dp_{i}}{dD_{j}}<0\), as an increase in the amount of donations received by candidate \(j\ne i\) causes candidate i’s subjective probability to decrease. As shown in Corollary 1, when the subjective probability that candidate i wins the election is concave and \(x_{i}<\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\), we have that \(\frac{dk_{i}^{*}}{dx_{i}}>0\), \(\frac{dk_{i}^{*}}{dx_{j}}<0\), \(\frac{dl_{i}^{*}}{dx_{i}}>0\), and \(\frac{dl_{i}^{*}}{dx_{j}}<0\). In addition, since \(x_{i}<{\hat{x}}_{i}\), a rightward move in candidate i’s position increases the utility he receives if he wins the election, thus \(\frac{dv_{i}(x_{i})}{dx_{i}}>0\). Due to these relationships, the left-hand side of Eq. (4) is positive, and thus, it cannot hold with equality. Thus, any \(x_{i}<\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) cannot be a solution to stage 1. A similar approach when \(x_{i}>\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) shows that the left-hand side of Eq. (3) is unambiguously negative and also cannot solve Eq. (4).
When \(x_{i}=\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) (\(x_{i}=\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\)), a similar situation occurs. All signs described in the previous paragraph are identical except for the sign that corresponds with \(\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) (\(\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\)). This term is equal to zero, as candidate i is either receiving the most possible subjective probability contribution by positioning himself at the median voter, the most possible utility by positioning at his own ideal policy, or the most possible donations from the donor with the leftmost (rightmost) ideal policy position by positioning at his most preferred policy position. The outcome is the same where the left side of Eq. (4) is unambiguously positive (negative), and cannot be satisfied when \(x_{i}=\min \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\) (\(x_{i}=\max \{{\hat{x}}_{i},{\hat{x}}_{j},{\hat{d}}_{k},{\hat{d}}_{l},m\}\), respectively). \(\square\)
1.9 Proof of Corollary 4
We can show the effect of rightward move of candidate i’s policy position, \(x_{i}\), graphically below in Fig. 11.

Donor utility functions
As seen in the above figure, when candidate i moves from position \(x_{i}\) to position \(x_{i}^{\prime }\) the decrease in utility to donor k, \(\Delta u_{k}(x_{i})\) is much less than the gain in utility to donor l, \(\Delta u_{l}(x_{i})\). Holding all other values of Eq. (2) constant, the resulting increase in candidate i’s policy position requires both equilibrium donation levels to decrease, but that for donor l to decrease by a larger amount. \(\square\)
1.10 Proof of Lemma 3
Let \(x_{1}=f_{1}(x_{2})\) and \(x_{2}=f_{2}(x_{1})\) be two continuous functions of the argument \(x_{1}\) and \(x_{2}\) each having domain [a, b] where \(a,b\in [0,1]\) and range [0, 1]. An equilibrium is defined by solving the two equations simultaneously for the solution \(x_{1}^{*}\) and \(x_{2}^{*}\). The solution can be characterized via substitution as \(x_{1}^{*}=f_{1}\circ f_{2}(x_{1}^{*})=f(x_{1}^{*})\) and \(x_{2}^{*}=f_{2}(x_{1}^{*})\), where the composite function \(f=f_{1}\circ f_{2}\) is also continuous.
Define an equally-spaced grid on the domain consisting of \(n+1\) points, as
Define piecewise linear approximations to the composite function \(f=f_{1}\circ f_{2}\) as
where \(I_{A}(x)\) is an indicator function taking values \(I_{A}(x)=1\) if \(x\in A\) and \(I_{A}(x)=0\) if \(x\notin A\).
For compactness, define \(\Delta _{k,k+1}\equiv \frac{f(x_{k+1})-f(x_{k})}{x_{k+1}-x_{k}}\). Let \({\hat{x}}_{1}^{*}\) represent the linear piecewise-approximated equilibrium value that solves \({\hat{x}}_{1}^{*}={\hat{f}}({\hat{x}}_{1}^{*})\), i.e., a fixed point of the above piecewise linear approximation \({\hat{f}}(x)\). Then, either \({\hat{x}}_{1}^{*}=1\) if \({\hat{f}}(1)=f(1)=1\), or else \({\hat{x}}_{1}^{*}={\hat{f}}({\hat{x}}_{1}^{*})\) for all \({\hat{x}}_{1}^{*}\in [x_{k},x_{k+1})\). We can rewrite the last expression as \({\hat{x}}_{1}^{*}-{\hat{f}}({\hat{x}}_{1}^{*})=0\) which, by the definition of \({\hat{f}}(x)\), expands as follows
We now focus on term \(({\hat{x}}_{1}^{*}-x_{k})\Delta _{k,k+1}\) of expression (11). Note that, upon letting the number of equally spaced grid points in the [a, b] interval increase without bound, i.e., \(n\rightarrow \infty\), it follows that \(x_{k+1}\rightarrow x_{k}^{+}\), yielding
Using this result in expression (11), it follows that, in the limit as \(n\rightarrow \infty\),
and the approximate and exact equilibriums converge. \(\square\)
Rights and permissions
About this article

Cite this article
Dunaway, E., Munoz-Garcia, F. Campaign contributions and policy convergence: asymmetric agents and donations constraints. Public Choice 184, 429–461 (2020). https://doi.org/10.1007/s11127-019-00732-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11127-019-00732-1