
Abstract
This paper focuses on the economic feasibility of applying autonomous robotic vehicles compared to conventional systems in three different applications: robotic weeding in high value crops (particularly sugar beet), crop scouting in cereals and grass cutting on golf courses. The comparison was based on a systems analysis and an individual economic feasibility study for each of the three applications. The results showed that in all three scenarios, the robotic applications are more economically feasible than the conventional systems. The high cost of real time kinematics Global Positioning System (RTK-GPS) and the small capacity of the vehicles are the main parameters that increase the cost of the robotic systems.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Precision Farming has enabled reduction of the area of management from the whole farm field down to sub field level. The scale-reduction process, however, could lead to the possibility of individual plant care systems called “phytotechnology”, from the Greek word phyto = plant [see the Japanese Society of PhytoTechnology (http://phytech.ishikawa-c.ac.jp/)]. Due to the increased data processing required to cover a complete field at the individual plant level, only certain operations could be carried out using human intervention and therefore different forms of automation, especially in high value crops, are needed. In recent years, the development of autonomous vehicles in agriculture has received increased interest to meet these opportunities. This development has led many researchers to start exploring the possibilities to develop more rational and adaptable vehicles based on a behavioural approach (Blackmore et al. 2004b). Research into autonomous vehicles in agriculture started in the early 1960s, mainly developing automatic steering systems (Wilson 2000). Robotic applications in agriculture, forestry and horticulture have been developed for various applications (Hollingum 1999; Kondo and Ting 1998). However, there are less scientific references to fully autonomous vehicles in agriculture, such as the automated harvesting system Demeter (Pilarski et al. 2002) as well as in semi-autonomous tractors (Billingsley 2000; Freyberger and Jahns 2000). There are a number of field operations that can be executed by autonomous vehicles, giving more benefits than conventional machines. Blackmore and Griepentrog (2002) referred to a number of autonomous platforms that may be available in the future. These autonomous platforms would be used for cultivation and seeding, weeding, scouting, application of fertilisers and chemicals, irrigation and harvesting.
With regard to agricultural autonomous vehicles, a concept was initiated to investigate whether it would be more efficient to replace traditional large tractors with small autonomous machines (Blackmore et al. 2004a). These vehicles would be capable of working up to 24 h a day all year round, unattended and able to behave sensibly in a semi-natural environment over long periods of time, while carrying out a useful task. The small vehicles may also have less environmental impact avoiding the over-application of chemicals and fertilisers, requiring lower usage of energy with better control matched to stochastic requirements, as well as causing less soil compaction due to lighter weight. They also argued that these vehicles might have smaller incremental investment and lower labour costs that would lead to a more sustainable production system.
So far, only a few studies have been published on the economic consequences of introducing autonomous field machinery to achieve more sustainable production systems. Goense (2003) compared autonomous with conventional vehicles, equipped with implements having working widths from 0.5 to 1.2 m. He showed that when the autonomous vehicles can be utilised 23 h a day, they would be economically feasible given slight reductions in prices of navigation systems or with slight increases in labour costs. On the other hand, there may be negative effects in the form of higher costs in travelling distances for service personal.
Additionally, Have (2004) analysed the effects of automation on machinery sizes and costs for soil tillage and crop establishment. He assumed that the ratios between an autonomous tractor and a manned tractor, in terms of price, labour requirement and daily working hours would be 1.2, 0.2, and 2 times, respectively. The analysis, which included all direct machinery and timeliness costs, showed that the shift to automatic control would decrease the tractor size, implement sizes and implement investments to about half; decrease the tractor investment to about 60% and decrease the sum of annual tractor and machinery costs to approximately 65%.
In this paper, three applications of autonomous vehicles in agriculture have been examined to determine their feasibility in comparison to conventional systems. These systems are field scouting in cereals, robotic weeding in sugar beet and grass cutting on golf courses. There are a number of research projects dedicated to identify the needs in these areas and to develop sensing systems and navigation algorithms to carry out these applications.
General methodology
In all three scenarios, we compared the costs and potential benefits of the potential commercial use of autonomous vehicles with conventional operations and management practices. We based the calculations on partial budgeting, where the cost change is compared to conventional practices. In this model frame, we included changes in initial investments, labour costs, change in speed, daily working hours, energy consumption, control and surveillance costs.
In reality, we compared the saved labour costs for the conventional systems with the additional costs for electronic devices, GPS-system and platforms for the robotic systems. However, for the robotic weeding system we also included savings of herbicides and spraying costs as outlined in Table 2.
All technical data (including dimensions, capacities, speed) and related costs were based on recommendations from other research groups and experts. However the economic figures such as period of depreciation, real interest rate (5%) and maintenance costs were based on the authors’ assumptions.
For the first two scenarios (field scouting and robotic weeding), the model was based on potential applications in conventional farms with average field size and a crop rotation as is common in Denmark. For the last scenario, though, grass cutting on golf courses, we modelled a conventional golf course. However, in all scenarios, we used sensitivity analysis to estimate any changes in size and costs that may have a significant impact on the economic efficiency.
For the grass cutting scenario, data about conventional grass cutting were provided by the green keeper at Skjoldenæsholm Golf Course, a medium sized golf course (18 holes on 65 ha) near Copenhagen, Denmark. For the other two scenarios, we have received data from researchers at Danish Institute of Agricultural Sciences (DIAS), Bygholm, who are working with these specific applications on an autonomous platform. The autonomous platform that they are using, is the Autonomous Plant Inspection (API) research platform (Bak and Jakobsen 2004). The data for the conventional applications were taken from general economic statistics for the Danish farm management standards, regarding specific costs for contracting.
For all three scenarios, we assumed that the period of depreciation was 10 years with linear depreciation. The real interest rate was 5% and we assumed that it would be necessary to add some additional labour time (2 weeks) for testing and making the necessary calibrations for the systems.
Autonomous scenarios
Case 1: Field scouting
There are many sensing techniques that can measure crop and soil conditions. A number of them could be used now in existing production systems, apart from the fact that data processing can take a long time. Examples are weed recognition using machine vision, multi-spectral response from the plant canopy that can indicate stress (whatever the cause) and chlorophyll content that is associated with crop vigour. Carbon dioxide (CO2) has been associated with soil health; ethylene can be associated with pest attack and soil conductivity has been correlated with soil moisture (Waine 1999). Soil nitrates, organic matter, caution exchange capacity (CEC), pH and soil moisture have been measured at different depths using Near Infra-Red (NIR) reflectance with a soil photo spectrometer in real time (Shibusawa et al. 2000). Ion selective field effect transistors (ISFETs) can be modified to be sensitive to nitrates, pH and other factors from soil solution (Birrel and Hummel 2001). Some of these sensing systems are still in the research phase but they hold great promise to improve our understanding and management of the growing crop and its environment.
For automatic weed detection, there have been a number of research studies applying different discrimination and classification techniques. Manh et al. (2001) used parametric deformable templates to segment individual weed leaves, Sökefeld et al. (2000) identified more than 20 weed species using Fourier descriptors and shape parameters, while Søgaard (2005) used Active Shape Models to identify 19 weed species. Artificial neural networks have also been used by many researchers to discriminate weeds (e.g. Burks et al. 2005) with machine vision. Other researchers have used image analysis techniques for weed discrimination using remote sensing from ground sensors (e.g. Vrindts et al. 2002) and airborne photography (e.g. Godwin and Miller 2003).
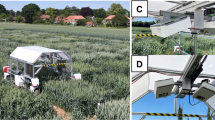
In the field scouting scenario, we compared autonomous field scouting for weeds in cereals with the manual detection of weeds. The autonomous system requires an API vehicle and cameras for weed detection and mapping. The Danish Institute of Agricultural Sciences (DIAS) has performed tests using such a vehicle for weed recognition and data from personal communications with the researchers have been used for our calculations. The API platform, (Fig. 1) was initially developed by Madsen and Jakobsen (2001). Now, there is the third generation of API vehicle, further developed by Aalborg University in Denmark. The new prototype has an aluminium frame, four wheel-drive, four-wheel steering with two motors per wheel, one providing propulsion and the other steering to achieve higher resistance to slippery terrains and more mobility (Bisgaard et al. 2004). The vehicle has a height clearance of 0.6 m and track width of 1 m. It is equipped with a real time kinematics Global Positioning System (RTK-GPS) and, on the top of the frame, there is an operating console and an implement for the agricultural operation, e.g. spraying or weeding tools. The vehicle communicates with the farm management PC for navigation, according to the computed route plan, as well as collision avoidance (Bak and Jakobsen 2004).

The API platform
The area for field scouting is limited to 500 ha (Table 1) in order to match large production units with the necessary flexibility. The shorter the time for carrying out the activity, the lower the overall capacity required.
For field scouting, the robotic system was compared with manual detection of weeds. Manual weed scouting is assumed to require about 0.7 man h/year/ha (Pedersen 2003). Most of the time for manual weed scouting will take place in the first year, which is followed by shorter update scouting in the following years. The weed patches are registered by using GPS and GIS systems to create weed maps of the individual fields. Autonomous field scouting using the API platform has a speed of 3.6 km/h and a capacity of 4.32 ha/h, which adds up to 116 h/year for autonomous weed scouting on a 500 ha area.
Field scouting is, to some extent, a hypothetical case in the sense that most farmers do not conduct systematic field scouting in their cereal fields. They either practice conventional farming with conventional spraying or they conduct organic farming with mechanical weeding. In this example, we assume that the alternative to autonomous field scouting is manual field scouting, which implies that the farmer has to count and register the weeds in the field manually. However, autonomous field scouting for weed detection will enable us to produce weed maps, which will be useful to carry out patch spraying. Patch spraying means the use of right mixture and dose rates of herbicides where they are needed. The technology and decision support systems to apply patch spraying is available and herbicide savings can vary between 30% and 75% (Heisel et al. 1999; Søgaard 2005).
The autonomous field scouting system in cereals reduces the costs by about 20% but it should be possible to increase the capacity to 1000–2000 ha since the system is only applied 116 h/year in the scenario presented above.
Sensitivity analysis
Since the costs of the autonomous platform are based on estimated costs of producing the platform, it might be the case that a commercial selling price will be significantly higher. An increase of the price of the API-platform from 15,141 to 30,281 € implies that the overall costs of the autonomous field scouting system will increase to 20.3 €/ha/year, which is slightly above the costs for manual weed scouting.
Case 2: Robotic weeding
As most horticultural crops are grown in widely spaced rows, inter-row mechanical weeding (weeding between the rows) has been popular since mechanisation started. The only problem has been in assessing the relative distance between the crop and the weeding tool, as it is difficult to keep the tractor exactly parallel to the crop row. Recent developments have led to the use of machine vision to recognise contextual information of the crop rows and steer the tool to within a few centimetres of the plants. This idea was first tested in the early nineties (Hoffman 1991; Steinhauser 1993) and has more recently been developed and commercialised by Tillett and Hague (1999) and by the Danish Institute of Agricultural Sciences together with Eco-Dan (Sögaard and Olsen 2003).
Nevertheless, apart from inter-row weeding, two other types of weeding have been defined and studied, which are intra-row and close-to-crop weeding (Norremark and Griepentrog 2004). There are two main concepts for intra-row and close-to-crop weeding, i.e., micro spraying and mechanical weeding. Søgaard (2005) has developed a machine vision algorithm to recognize 19 different weed species using the Active Shape recognition method, which then uses a micro-sprayer to deliver small drops on the weed plants. Gaglia (2004) referred to micro spraying and mentioned that this system could be able to drastically reduce the amount of herbicides needed to just 1 g of Glyphosate per hectare. Griepentrog et al. (2004) have referred to robotic weeding for removing the weeds within the row. They have proposed a holistic system that first starts logging the precise location of each seed within the seeding operation. The data from the seed locations combined with a weed recognition system could be used to mechanically remove the weeds within the rows and close to the crops with mechanical tools, such as a cycloid weed hoe (Wißerodt et al. 1999). Sørensen et al. (2005) studied the feasibility of using robotic weeding tools in organic farming. They reported that these technologies, whilst increasing capital investment, will achieve reduction in labour demand by 83–85% in sugar beet and 60% in carrots, improving the profitability of these crops by 72–85%.
Small automatically steered weeding vehicles have been developed by a number of research teams recently. Marchant et al. (1997) developed an autonomous vehicle to navigate with odometry and image analysis in a field of transplanted cauliflowers. Tillett et al. (1998) reported development of a small reactive horticultural toolbar that could recognise and spray each plant individually. In Sweden, an automatic steered weeding vehicle using machine vision has been developed at Halmsted University (Astrand and Baerveldt 2002). Additionally, the Royal Veterinary and Agricultural University (KVL) in Taastrup, Denmark has developed an autonomous vehicle for mechanical weeding of Christmas Trees (Have et al. 2005).
In the robotic weeding scenario, we compared an autonomous vehicle equipped with a micro spraying system with a conventional sprayer for sugar beet. The micro spraying system would be mounted on the same API platform as the one described above for field scouting. The micro system has been developed at University of California at Davis and has been tested at both UC Davis and at DIAS. The micro sprayer consisted of a set of eight micro valves with a driver circuit for each nozzle. Each nozzle consisted of five micro tubes. The total spraying width could be varied from 127 mm to 1016 mm to cover the seed line (Lee et al. 1999). Another approach for robotic weeding in sugar beet has been described by Griepentrog et al. (2004) that uses a cycloid hoe instead of a micro spraying system. In both cases, the inter-row weeding (between the rows) is supposed to be carried out conventionally. We only focus on the intra-row weeding and close to crop. The data used for the calculations were from the tests made by DIAS and personal communication with the scientist in charge (Lund, 2004: personal communication). The autonomous system consists of an API platform with optical sensors, an RTK-GPS, and a micro spraying system. It is assumed that this system can reduce the application of herbicides by 90% compared with standard doses in sugar beet (Lund, 2004: personal communication). The working speed is assumed to be 1.8 km/h with recharging of batteries every 5 h. The working width is 2 m with a capacity to treat 4 rows simultaneously.
The area capacity for the robotic weeding is adapted according to the limited time for spraying during the year.
The robotic weeding is a more time consuming task than field scouting. The robotic system is compared with the costs of conventional weeding in sugar beet. The costs for these operations (herbicide application, spraying and inter-row hoeing for the conventional system) are based on average prices for contracting (incl. labour time spent on each operation). (Dansk Landbrugsrådgivning 2004a, b). With a micro spraying system, it should be possible to reduce the herbicide applications by 90% (Lund, 2004: personal communication) in sugar beet. The API platform, as designed for this scenario, is equipped with 4 micro spraying systems, which cost 6.730€ each. The autonomous platform is able to cover 4 rows at a time. The speed is 1.8 km/h and the capacity is 0.4 ha/h, which adds up to 667 h/year for autonomous weeding on a total area of 80 ha (Table 2).
The autonomous micro sprayer weeding is compared with conventional spraying in sugar beet. For the autonomous micro spray system, we assume that inter-row hoeing has to be conducted twice whereas, for conventional spraying, we assume one treatment. For comparison, it might be relevant to inter-row hoe 3 times when conducting band spraying. The primary savings are related to the reduced application of herbicides and the additional costs are primarily related to investments in the micro-spraying system. With this autonomous system, it is possible to handle 4 rows with the API platform. In the future, it might be possible to handle 6 or 8 rows at a time. Moreover, the costs of each spraying system are likely to be reduced with larger systems.
Sensitivity analysis
By reducing the cost of the RTK-GPS system to half the current price, it is possible to reduce the overall cost of autonomous weeding by 12–21% compared with conventional weeding. On the other hand, a reduction of the period of depreciation to less than 6 years would imply that conventional weeding will become more economically viable than autonomous weeding (Fig. 2). In fact, with a depreciation period of 5 year, the costs of micro spray weeding will be 15% higher than conventional systems.

Autonomous weeding, cost reduction with change in depreciation period (10–5 year)
Another crucial problem with the micro spraying system is the low capacity. If we increase the capacity from 4 to 6 rows in one movement then it should be possible to increase the capacity to 120 ha and thereby reduce the costs from 12.2% (basic scenario) to 25.5%.
The use of herbicides may also be reduced to about 5% of conventional doses according to the latest trial at the Danish Institute of Agricultural Sciences.
A further reduction of herbicides to 5% of the current application with conventional spraying would reduce the costs to nearly 16% (Fig. 3) of conventional treatment. On the other hand, with herbicide application levels above 26% of conventional spraying, it might be less attractive to shift from conventional spraying from a financial point of view. However, it might be relevant to consider the reduced application of herbicides as an environmental benefit, which may result in a socio-economic benefit.

Autonomous weeding, cost reduction with change in herbicide consumption (30–5%) of conventional spraying in sugar beet
Case 3: Grass cutting
Grass cutting is a major operation for municipalities, parks, estates, sports terrains and golf courses. The operation is tedious and it has to be repeated on a regular basis, depending on the climatic conditions and the usage. Golf courses, for instance, require daily operations especially in the areas around the greens and tees. There have been a number of attempts to manufacture autonomous grass cutters. One guidance concept has been to use small vehicles and a wire around the border of the area to be cut. The vehicle randomly covers the whole area and at the same time avoids obstacles. However, there are problems with a lot of overlaps (Morland 2002) and, as a consequence, reduced field efficiency and capacity. One commercial autonomous domestic lawnmower is the “Robomow” from Friendly Robotics® www.friendlyrobotics.com that has also the advantage of having a docking station for automatic recharging without human intervention. In addition, there are other lawnmowers that are operated remotely through a joystick for highly sloping fields, such as the commercial vehicle Spider® (http://www.spider-online.net/index.html).
With the autonomous grass cutting scenario, it is assumed that it is possible to replace a conventional grass cutter with a robotic grass cutter on those areas that require medium to low cutting skills. This means on the fairway (16 ha) and the semi-rough area (20 ha), which adds up to 36 ha (see Table 3). The annual time spent on these procedures is 784 h. The fairway lawn is cut about 2–3 times per week and the semi-rough area has to be cut once a week. This procedure takes place about 24 weeks per year (Glarborg, 2004: personal communication), implying that about 24 movements have to be made from the fairway to the semi-rough areas each year. In addition, time is needed for refuelling the robot every day. For the robotic grass cutter, the electronic equipment is mounted on a conventional grass cutter with RTK-GPS for position, laser scanner and an ultrasonic range finder to avoid obstacles, job computer, actuators and linkages. The system can be linked to a control unit where any serious problems would activate an alarm signal on a mobile phone. This is a similar approach to the development of an autonomous Christmas Tree Weeder, where a conventional grass cutter was transformed into an autonomous one (Have et al. 2005).
For the grass cutter, the driver is replaced with a robotic system equipped with an RTK-GPS. The grass cutter, in this example a 5200-D from TORO, www.toro.com with cylinder cutters, is applied to the fairway area (grass length 17–20 mm) and semi-rough area (grass length 40 mm) at the golf course. Usually, a TORO 455 with rotor cutters is used for the semi-rough area but we assume that the same system can be applied to both areas in order to improve the yearly capacity and reduce investment. The width is 2.41 m with 5 cutting units and a tank capacity of 38 l diesel fuel. In this comparison, we assume that the same grass cutter is used for manual grass cutting and that time for cutting, fuel application and maintenance costs are similar for both the manual and autonomous system.
For this system (see Table 3), it is possible to reduce the costs by more than 300 €/ha (586.3–283 €/ha), which is equivalent to about 10,902 €/year on the fairway (16 ha) and semi-rough (20 ha) area.
For both the conventional and autonomous grass cutting systems, it will be necessary to invest in a TORO-5200D grass cutter (60,565 €). The actual fuel consumption is expected to be similar for both systems. However, in practice, it might be the case that by using an autonomous system, fuel consumption will be reduced due to fewer overlaps. The labour time spent on the conventional system includes grass cutting and additional relaxation breaks which is based on an average Danish salary (27 €/h). We assume that the tank capacity is about 5 h for the lawn mower, implying that the tank has to be refuelled every 5 h. Each refuelling is expected to take about 10–15 min. These costs have to be included for the autonomous grass cutting system. It is assumed that the yearly fee for a reference GPS signal is 1,615 €/year. In addition, it is necessary to pay 1.3 €/h for using a RTK reference signal.
Discussion
In this paper, we have analysed the economic viability of three hypothetical autonomous robotic systems. In all scenarios, we have replaced trivial labour intensive tasks for specific areas with autonomous systems based on highly accurate GPS-systems. These concepts and applications could be expanded to other field cultivation systems, tillage systems and grass cutting tasks at sport facilities and at public recreation areas. The autonomous grass cutting is the most economically viable as the labour use in this operation is very intensive. However, there seem to be several other external factors and benefits that may improve the overall economic gain from the other systems. The autonomous weeding system with micro spraying in sugar beet may reduce the overall herbicide application by 90% and thereby improve the socio-economic benefit. The autonomous field scouting system opens up the possibility for easier weed mapping, which again may give an incentive to conduct patch spraying in cereals and other crops. In addition, these robotic systems may further improve flexibility and expand the daily time constraints to night operations in the field and thereby improve the efficiency in modern crop production.
Based on the various systems and technical assumptions above, we have provided the potential economic viability of operating these systems compared to a similar treatment with conventional practices. The total investment for the three systems varies between 38,000 € and 65,000 €.
The RTK-GPS system is still fairly expensive for these practices, although the price is expected reduce as the technology becomes more widespread. The cost of receiving a GPS reference signal accounts for a significant share of the yearly costs for all 3 autonomous systems. All systems seem to be economically viable given the technical and economic assumptions above.
For all systems, we assume a depreciation period of 10 year. However, given the intensive utilisation of the grass cutter and the robotic weeding system, it may be necessary to reduce the period of depreciation to about 5–8 year. In contrast, the autonomous field scouting system might have a longer lifetime than outlined above. For all investments, we assumed that maintenance is an additional 3% of investment costs.
For the basic scenario, the costs of using autonomous systems for grass cutting will reduce costs by nearly 52%. However, if it is necessary to apply both a TORO 455 and a TORO 5200 for the fairway and the semi-rough area then the costs are reduced by only 22% compared to manual grass cutting.
It should also be possible to reduce field scouting costs by nearly 20% in cereals and for the autonomous weeding in sugar beet, it might be possible to reduce costs by 12%. For the latter however, it might be possible to reduce costs by 24% compared to conventional treatment if inter-row hoeing could be reduced to only one treatment as for conventional weeding. In these calculations, we have used fairly conservative economic figures based on current prices. However, we may expect a further reduction in the price of RTK-systems and other electronic systems in line with increased supply of these systems. Software costs are not explicitly included in this study, apart from the RTK software system. Sensors for safety, such as ultrasonic, laser scanner and bumpers, although very important, were also not included in this study in order to simplify the analysis. Some additional costs should, therefore, be expected depending on the distribution of the systems.
Conclusions
An initial outcome from this study indicates that most of these autonomous systems are more flexible than conventional systems and may reduce labour costs and restrictions on the number of daily working hours significantly. Moreover, it is possible to substitute the most trivial working routines with autonomous systems although some routines are nearly impossible to automate due to the required accuracy of the specific tasks. In addition, at this stage of development, the initial investments and annual costs for expensive GPS systems are still relatively high but it seems possible to design economically viable robotic systems for grass cutting, crop scouting and autonomous weeding.
References
Astrand B, Baerveldt AJ (2002) An agricultural mobile robot with vision-based perception for mechanical weed control. Auton robot 13:21–35
Bak T, Jakobsen H (2004) Agricultural robotic platform with four wheel steering for weed detection. Biosyst Eng 87(2):125–136
Billingsley J (2000) Automatic guidance of agricultural mobiles at the NCEA. Industrial Robot 27(6):449–457
Birrel SJ, Hummel JW (2001) Real-time multi ISFET/FIA soil analysis system with automatic sample extraction. Comput Electron Agr 32:45–67
Bisgaard M, Vinther D, Østergaard KZ (2004) Modelling and fault-tolerant control of an autonomous wheeled robot group report 04gr1030a. Denmark, Institute of Control Engineering Aalborg University
Blackmore S, Griepentrog HW (2002) A future view of precision farming. In: Berger D, Bornheimer A, Jarfe A, Kottenrodt D, Richter R, Stahl K, Werner A (eds) PreAgro: Proceedings of the PreAgro precision agriculture conference (pp 131–145) Muncheberg, Germany: Center for agricultural landscape and land use research – ZALF
Blackmore S, Fountas S, Tang L, Have H (2004a) Design specifications for a small autonomous tractor with behavioural control. J Int Comm Agric Eng (CIGR). Manuscript PM 04 001. vol. 6 July 2004
Blackmore S, Fountas S, Vougioukas S, Tang L, Sørensen CG, Jørgensen R (2004b) Decomposition of agricultural tasks into robotic behaviours. J Int Comm Agric Eng (CIGR). Accepted
Burks TF, Shearer SA, Heath JR, Donohue KD (2005) Evaluation of neural-network classifiers for weed species discrimination. Biosyst Eng 91(3):293–304
Dansk Landbrugsrådgivning (2004a) Håndbog til driftsplanlægning. Handbook for farm management, Landbrugsforlaget (in English). Skejby, Denmark
Dansk Landbrugsrådgivning (2004b) Budgetkalkyler for 2004. Budget and gross margin calculations for danish cropping systems (in English). Skejby, Denmark
Freyberger F, Jahns G (2000) Symbolic course description for semiautonomous agricultural vehicles. Comput Electron Agr 25:121–132
Gaglia E (2004) Importance of herbicide concentration, number of roplets and droplet size on growth of Solanum nigrum l, using droplet application of glyphosate. In: Proceedings of the XIIeme colloque international sur la biologie des mauvaises herbes. Dijon, 31 August–2 September 2004 (INRA)
Godwin RJ, Miller PCH (2003) A review of the technologies for mapping within-field variability. Biosyst Eng 84(4):393–407
Goense D (2003) The economics of autonomous vehicles. In: Proceedings of the VDI-MEG conference on agricultural engineering, VDI-Tatung Landtechnic,Hannover, Germany, 7–8 November, 2003
Griepentrog HW, Christensen S, Søgaard H, Norremark M, Lund I, Graglia E (2004) Robotic weeding. In: EurAgEng04: Leuven, Belgium, 12–16 September 2004. European society of agricultural engineers, paper 392
Have H (2004) Effects of automation on sizes and costs of tractor and machinery. In: EurAgEng04: Leuven, Belgium, 12–16 September 2004, European society of agricultural engineers, paper 285
Have H, Nielsen J, Blackmore S, Theilby F (2005) Development and test of an autonomous Christmas tree weeder. In: Stafford JV (ed) Proceedings of the fifth European conference on precision agriculture. The Netherlands, Wageningen Academic Publishers, pp629–635
Heisel T, Christensen S, Walter AM (1999) Whole-field experiments with site-specific weed management. In: Stafford JV (ed) Proceedings of the second European conference on precision agriculture part 2. Sheffield UK, Sheffield Academic Press, pp759–768
Hoffman M (1991) Machine vision for row crop sensing. M.Sc. thesis. Bedfordshire, UK: Cranfield University at Silsoe
Hollingum J (1999) Robots in agriculture. Ind Robot 26(6):438–445
Kondo N, Ting KC (1998) Robotics for bioproduction systems – St. Joseph, MI, USA: ASAE
Lee WS, Slaughter DC, Giles DK (1999). Robotic weed control system for tomatoes. Precis Agr 1:95–113
Madsen TE, Jakobsen HL (2001) Mobile robot for weeding. MSc. Thesis. Lynby, Denmark: Danish Technical University
Manh AG, Rabatel G, Assemat L, Aldon MJ (2001). Weed leaf image segmentation by deformable templates. J Agr Eng Res 80(2):139–146
Marchant JA, Hague T, Tillett D (1997) Row-following accuracy of an autonomous vision-guided agricultural vehicle. Comput Electron Agr 16:165–175
Morland C (2002) Autonomous lawnmower control. Report No. 98060792. Department of cognitive and neural systems, Boston University, USA
Norremark M, Griepentrog HW (2004) Physical methods to control weeds within crop rows. In: EurAgEng04: Leuven, Belgium, 12–16 September 2004, European society of agricultural engineers, paper 405
Pedersen SM (2003) Precision farming – technology assessment of site-specific input application in cereals. Ph.D. dissertation, IPL, Danish Technical University, Lyngby, Denmark
Pilarski T, Happold M, Pangels H, Ollis M, Fitzpatrick K, Stentz A (2002). The demeter system for automated harvesting. Auton Robots 13:9–20
Shibusawa S, Sato H, Hirako S, Otomo A, Sasao A (2000) A revised soil spectrophotometer. In: Shibusawa S, Monta M, Murase H (eds), Proceedings of the second IFAC/CIGR international workshop on BIO-ROBOTICS II 25–26 November 2000, Osaka, Japan, pp225–230
Steinhauser T (1993) Steering a mechanical weeder with intelligent sensing using machine vision. M.Phil thesis. Bedfordshire UK, Cranfield University at Silsoe.
Søgaard HT (2005) Weed classification by active shape models. Biosyst Eng 91(3):271–281
Søgaard HT, Olsen HJ (2003). Determination of crop rows by image analysis without segmentation. Comput Electron Agr 38:141–158
Sørensen CG, Madsen NA, Jacobsen BH (2005) Organic farming scenarios: Operational analysis and costs of implementing innovative technologies. Biosyst Eng 91(2):127–137
Sökefeld M, Gerhards R, Kühbauch W (2000) Site-specific weed control – from weed recording to herbicide application. In: Proceedings of the twentieth German conference on weed biology and weed control, University of Hohenheim, Stuttgart–Hohenheim, Germany, 14–16 March, 2000
Tillett ND, Hague T, Marchant JA (1998). A robotic system for plant-scale husbandry. J Agr Eng Res 69:169–178
Tillett ND, Hague T (1999) Computer-vision-based hoe guidance for cereals - an initial trial. J Agr Eng Res 74:225–236
Waine T (1999) Non-invasive soil property measurement for precision farming. Engineering doctor thesis. Bedfordshire, UK: Cranfield University at Silsoe
Wilson JN (2000) Guidance of agricultural vehicles – a historical perspective. Comput Electron Agr 25:1–9
Wißerodt E, Grimm J, Kemper M, Kielhorn A, Kleine-Hartlage H, Nardmann M, Naescher J, Trautz D (1999) Gesteuerte Hacke zur Beikrautregulierung innerhalb der Reihe von Pflanzenkulturen (Steered hoe for weed control in crop rows). Düsseldorf Germany, VDI-Verlag, pp155–160
Vrindts E, De Baerdemaeker J, Ramon H (2002) Weed detection using canopy reflection. Precis Agr 3:63–80
Acknowledgements
This project is part of the Agrobotics project funded by the Danish Technical Research Council. We appreciate the assistance we received about technical issues from associate professor Hans Werner Griepentrog, KVL, Scientists Ivar Lund, Henning Søgaard, Claus G. Sorensen at DIAS and Green keeper Mette Glarborg, Skjoldenæsholm Golf Club.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Pedersen, S.M., Fountas, S., Have, H. et al. Agricultural robots—system analysis and economic feasibility. Precision Agric 7, 295–308 (2006). https://doi.org/10.1007/s11119-006-9014-9
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-006-9014-9