
Abstract
Ever since the space tether was first proposed by Tsiolkovsky, it has been extensively utilized in space missions, for attitude stabilization, momentum exchange, and space elevators. Developments in engineering technology and changes in the space environment have diversified the current applications for the space tether. New applications for the space tether include the Tethered Space Robot, Tethered Space Net, and Tethered Spacecraft Formation. These are quickly being adapted for in-orbit maintenance such as fueling service, orbit maneuvering, and active space debris capture/removal. The flexibility and elasticity of the space tether lead to complex issues with tethered space systems, including the mechanics design, dynamics modeling and analysis, and control scheme design. In this paper, we review several new applications for the space tether during service in orbit, and research the on structure, dynamics, and control of each application. This review is conducted to provide an overall summary of the space tether for On-Orbit Servicing, and further the conversation regarding possible research interests in the future.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Ever since the concept of the space tether was first proposed by Tsiolkovsky in 1895, it has generated a multitude of possibilities for use in space exploration [1]. In the beginning, applications for the space tether seemed science fictions than reality. Space tethers were imagined for use within artificial gravity, as a space elevator, for orbit transfer, and for similar, seemingly otherworldly tasks. The space missions of the 1960s saw a turning point for the application of the space tether. In later decades, many of publications were released and proposed applications became great in number and in variety.
More recently, there has been a growing interest in On-Orbit Servicing (OOS), which comprises all aspects of in-orbit assembly, including preventative and corrective equipment maintenance, consumables replenishment, upgradation, repair, and space debris removal [2,3,4]. The achievement of OOS missions have been very successful for spacecraft operators, to facilitate space montage, orbital maneuvering, in-orbit maintenance and repair, refueling, and deorbiting. In early OOS missions, astronauts took part in extra vehicular activities (EVA) only protected by their spacesuits, they had to walk outside of the capsule for spacecraft reconditioning. These manned OOS missions are dangerous for astronauts, and extremely expensive. Robotic devices built specifically for in-orbit manipulations were addressed, and have developed rapidly since 1980s [2]. The majority of existing rigid robotic arms are designed and created in such a way to maximize stiffness and minimize vibration of the end-effector in order to achieve precise position [5]. Compared to the heavy rigid manipulator conventionally used safety at the moment of contact with the object, flexible manipulators in OOS, flexible manipulators are advantageous in their lower cost, higher payload in manipulator weight ratio, better maneuverability, easier transportability, and more secure manipulation. Because weight reduction lowers the launching cost, and softness improves are better suited for space applications in OOS.
However, both rigid and flexible manipulators only work for short range capture, and point-to-point capture is difficult and risky, especially in an uncooperative capture. Scholars are begun to focus on the space tether as a new approach to capture techniques. Before these new OOS, research of the space tether had fallen to the wayside for a number of years. Most traditional space tether applications (e.g., orbit transfer or artificial gravity) are impossible or excessively costly with the existing space technology and engineering capacity.
Research on the space tether is growing rapidly due to the relative maturity of OOS technology, and high demand for new space tasks. Research on the design, dynamics, control, and testing for various space tethers, is motivated by their potential in OOS.
This paper provides a review of space tethers in OOS on different topics related to Tethered Space Robot, Tethered Space Net, and Tethered Space Formation. The rest of this article is organized as follows: Sect. 2 reviews the applications in the early stage, and the space verification experiments for the space tether in the prophase. Section 3 discusses the Tethered Space Robot for OOs, including mission scenarios, and the extant research on dynamics and control in different phases. Section 4 outlines the research on the Tethered Space Net. Section 5 overviews the Tethered Space Formation. Section 6 provides a brief summary and conclusion.
2 Development of space tether
2.1 Applications in early stage
Tethers are commonly considered to be as useful in their performance in space as they have been on the Earth [6]. The space tether concept has been studied for over 100 years, and applications in various capacities have been proposed by many different researchers. In this section, we will summarize several basic concepts of space tethers applications cite several contributions to the development of the space tether concept.
2.1.1 Artificial gravity
Artificial gravity is highly desirable for long manned space flights since even small fractions of gravity will improve living conditions aboard a space station. It was precisely for this task that the space tether was first proposed. The centrifugal force of inertia can be used to create artificial gravity on Earth or in space. Tsiolkovsky thought to implement this idea in 1895 wherein two spacecraft were connected by a tether chain and the whole system was rotated to create artificial gravity [7]. The length of the chain is a key factor in the magnitude of the force generated as well as the square of the angular velocity of the mechanical system’s rotation.
Chobotov was the first researcher to render a detailed dynamic analysis of this mode of motion in orbit in 1963 [8]. Gemini 11, tethered to the rocket stage Agena, was the first spacecraft to demonstrate the feasibility of this concept during its flight in 1966 [9]. Generating an artificial gravity of even \(10^{-4}\,\hbox {g}\) can be very useful in space. One example would be the transfer of supplies (such as fuel [10]) from one spacecraft to another, where microgravity could accelerate the process.
2.1.2 Orbit transfer
There are advantageous and far-reaching applications associated with the space tether for transportation. Traditionally, thrusters are mounted on a spacecraft as a reactive mass for maneuvering in orbit. When the working medium is exhausted, however, this process will fail.
For tethered satellites on opposite sides, the use of a space tether system utilizes a pure exchange of energy and angular momentum between them. Since there is no fuel consumed, this kind of orbit transfer system promises a sizable reduction in fuel usage. Hence, it is a viable alternative to the traditional approach.
Colombo et al. [11], Bekey [12], Penzo [13], and Carroll [14] studied this potential alternative extensively to find that the space tether system can indeed save large quantities of fuel for transfer missions in circular orbits. Kyroudis and Conway [15] further studied a tethered dumbbell system with an elliptical orbit to explore the advantages for satellite transfer at geosynchronous altitude. Kumar et al. [16] studied different kinds of tether deployment systems for raising orbits as well as out-of-plane payload liberation. Yasaka [17] studied the problems of orbit transfer for exhausted tumbling satellites. Bekey [18] and Kumar [19] stated the advantages of using a tethered reusable satellite for payload deployment. Lorenzini et al. [20], Ziegler and Cartmell [21] studied spinning tethered systems. Ziegler and Cartmell also examined tether release via spindle dynamics in regard to altitude gains of the SV/payload. Kumar et al. [22] studied the tether retrieval used for the SV/payload deployment and proposed a system model including a payload and a connection tether.
Bonnal et al. [23] introduced the principle and modeling of the “MAILMAN” process. They put forward the idea of optimization with variable weight factors that can be applied to deorbit debris with passive tethers. In their plan, a passive tether is used to lower the orbital lifetime of debris N; simultaneously, the chaser maneuvers from N to the adjacent \({N}+1\) benefiting from the momentum \(\Delta {V}\) saved. Hyslop et al. [24] presented a micro-launcher with a tethered upper stage and tested it on two typical missions: Payload delivery into a target orbit and deorbiting an exhausted solid stage to Earth. They also proposed a preliminary design of the tether system.
2.1.3 Attitude stabilization
The orientation of a spacecraft mission is usually oriented toward the Earth’s direction. When in space, it may be necessary to maintain this orientation for a long time. Active stabilization systems can assist in satisfying this requirement. Traditionally, these systems use jet engines with small thrust for attitude adjustment. However, these kinds of systems have the same disadvantage as the requirement for the use of a propellant. The passive stabilization system was developed as a solution to this problem; a long flexible tether with the load is one such approach.
In the 1960s, Chobotov [25] and Robe [26] both proposed and improved upon the use of tethers for satellite gravity-gradient stabilization. The tether can be applied for a distance as long as several kilometers between the spacecraft and the stabilizing target, and thus create an increase in the recovering moment of the gravity-gradient; this value is proportional to the distance in its first approximation.
Misra and Diamond [27] presented a TSS model for attitude stabilization consisting of a main satellite and a subsatellite linked by two extendable massless tethers. Both of out-of-plane and in-plane motions of TSS were assumed to be in a circular Keplerian orbit. The longitudinal oscillations of the tether were also considered. Ciardo and Bergamaschi [28] researched the motion discipline of a dual-tether system including the 3D altitude motion of the tether with in-plane and out-of-plane angles. Ignoring tether tension variations, motion discipline was described by linearized equations and simulated accordingly. Banerjee and Kane [29] studied the use of pull force for controlling the stability of a space platform connected to a space station by two tethers. Kumar [30] studied the use of two tethers for satellite altitude stabilization during circular orbit motion. Kumar also studied the this problem in an elliptic orbits [31, 32], and analyzed the altitude dynamics of a dual-tether system with a kite-like tether configuration [33]. These works have altogether demonstrated that it is feasible to use two tethers for passive satellite pointing stability.
2.1.4 Others
A number of valuable tether applications have been also suggested by Levin [35], including upper atmosphere exploration, interplanetary transfers, space escalator, creation of a traffic artery linking Earth and the moon, auxiliary structural members, space harpoons, and so on. This list can be extended. More so, any discussion on tether applications often brings about new proposals–in short, there is much further potential for the space tether concept.
2.2 Space test and verification
Compared to a conventional manned OOS operation or an OOS manipulator, the OSS space tether is distinguished by three main features: A larger working space, a flexible configuration due to the changeable length (by release and retrieval with respect to the connected spacecraft), and the maneuverability [36]. Several experiments have been conducted on the space tether to verify the feasibility and effectiveness of its key technologies before practical application in OOS missions.
A Soviet cosmonaut carried out the first EVA on March 18, 1965 tethered to his spaceship for safety: This was the first application of a tether in space. Later, on September 12, 1966, America’s Gemini 11 was launched with the intent of testing their rendezvous and docking technology [10]. The first space tether experimentation aimed at generating artificial gravitation was met with great success, resulting in a \(10^{-4}\) g acceleration. On November 11, 1966, Gemini 12 was launched and the space tether experiment on gravitational stabilization lasted for approximately four-and-a-half hours [37]. The Gemini 12 experiments illustrated that the dynamics of a space tether were more complex than researchers had first expected. For this reason, the Apollo project was not fitted with a space tether system.
Due to the lack of appropriate technology, complicated by the characteristics of tether dynamics, tether experiments in space were suspended for more than a decade after the Gemini missions. There was a renewed interest for such experiments in the 1980s, however. Since then, America, Japan, Canada, and other countries have carried out numerous space experiments with electric tethers such as the Tethered Payload Experiment (TPE), Cooperative High Altitude Rocket Gun Experiment (CHARGE-1 [38], CHARGE-2 [39], CHARGE-2B [40]), Observations of Electric-field Distribution in the Ionospheric Plasma – a Unique Strategy (OEDIPUS-A, OEDIPUS-C [41]), and so on.
In July 1992, the Tether Satellite System (TSS-1) experiment was implemented by the USA and Italy. The TSS-1 mission focused on a wide variety of tests involving tether dynamics and the physics of space plasma, as well as the Faraday effect based on electrical energy generation [40]. In this mission, the Space Shuttle Atlantis (STS-46), tethered by a spherical subsatellite, was employed as an experimental spacecraft. The subsatellite had a diameter of 1.6 m and a mass of 521 kg, while the conducting tether had a diameter of 2.54 mm. In the experiment, the subsatellite was released along the local vertical toward the Earth. After the deployed tether reached 268 m, a malfunction occurred and the deployment was halted. The experimental data indicated that the short tether deployed from the shuttle was more rigid than expected. After the unsuccessful TSS-1 program, the TSS-1R experiment was repeated in 1996 with the equipment mounted on the Space Shuttle Columbia (STS-75) [42]. During the experiment, the electrodynamic tether was released to 19.7 km yielding a voltage of 3500 V. Although there was an electrical arc causing a break in the tether, the experiment still demonstrated favorable potential for space tether use in electrical power generation.
In March 1993, the Small Expandable Deployer System (SEDS-1) experiment was launched [43]. The experiment aimed to demonstrate the capability to deorbit a payload by means of a tether without fuel consumption, and to study the dynamics of a payload after being separated from a tether. The device and payload were moved to the second stage of a Delta II rocket used for launching GPS satellites into orbit. A 20 km tether made of Spectra-1000 and a 26 kg payload were utilized in the experiment. The deployment of the space tether used predictive control instead of feedback control. The tether was successfully deployed, but the relative velocity of the payload was about 7 m/s leading to a series of oscillations. The tether was cut at the predetermined time, causing the payload to descend along a ballistic trajectory into the atmosphere and eventually splash down near to the coast of Mexico.
In 1994, the SEDS-2 experiment was executed to evaluate the efficiency of the feedback deployment control mechanism and to investigate the dynamic evolution of Space Tether System (STS) in the long term [43]. Vertical deployment of the tether was achieved, the relative velocity of the cable was smaller than 0.02 m/s, and the oscillation amplitude of the tether was suppressed within 4\(^\circ \). The STS was planned to be in orbit for 12 days; however, the tether was ruptured due to a collision with a micrometeorite on the fourth day. A 7.2 km portion of the tether continued to be attached to the Delta II stage and remained stable along the local vertical with a tension of 0.4 N.
In 1996, the Tether Physics and Survivability (TiPS) mission was carried out to evaluate the reliability of space tethers and their likelihood for long-term usage [44]. There were two spacecraft and a 4 km non-conducting Spectra-1000 tether with a diameter of 2 mm constituting the system. The system was planned for a 3-years orbit, but functioned well in orbit until 2006. In 1998, by virtue of the success of TiPS, an Advanced Tether Experiment (ATEx) was conducted in three fields: (1) Experiments on the tether oscillation control using sixteen thrusters mounted on one spacecraft; (2) tests on the feasibility of using satellite laser ranging to stabilize the altitude of a tethered satellite; and (3) exploring improved reliability of the tether system using a multicore flat strip. Unfortunately, an accident occurred causing the tether to be cut unexpectedly at 22 m due to a false command from the onboard computer.
The ESA’s Robotic Geostationary Orbit Restorer (ROGER) started in 2001, the main task being to investigate the commercial and technical conditions which would establish a satellite servicing system with the capability to clean up the geostationary orbit of satellites and send them into disposal orbits [45]. There were two different types of capture mechanism: The net capture scheme, and the tether-gripper scheme. Unfortunately, the program was stopped in 2003.
The Russian–European experiment Young Engineers Satellite 2 (YES2) [46] was executed in 2007 to test the likelihood of payload orbit transfer using a dynamic deployment scheme [47]. The non-conducting tether was 31.7 km long and 0.5 mm in diameter, but because of malfunctions in the deployment gear, the tether was unreeled at 29 km. The capsule with the cargo successfully descended from orbit, but was not located on Earth.
On January 23, 2009, KUKAI was launched by the Japan Aerospace Exploration Agency (JAXA) with the H-IIA rocket. The orbit is a sun-synchronous orbit at altitude of 700 km and inclination of 98\(^\circ \). The KUKAI’s main mission is the technical verification of a Tethered Space Robot [48, 49].
3 Tethered space robot
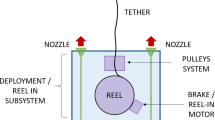
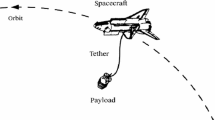
The Tethered Space Robot (TSR) (Figs. 1, 2) is composed of a space platform, a space tether, and a gripper/manipulator. Because of its flexibility and large workspace, the TSR is a promising future solution for On-Orbit Servicing such as in orbit maintenance and repair, in-orbit refueling, orbit maneuvering, and space debris removal [34, 50, 51].


Tethered space manipulator
3.1 Mission description
The TSR mission scenario (shown in Fig. 3) examined here is similar to the one described by Zhai [53]. The TSR is propelled by large launchers such as CZ-3s.
-
(1)
Orbit transfer sub-maneuver The system will maneuver to point (S1), which is around 100 km below and 200 km behind (or ahead of) the target with the same inclination but different altitude.
-
(2)
Homing sub-maneuver A thrust maneuver leads TSR to drift to the point (S2), which is located 15 km behind but in the same orbit altitude as the target. When this sub-maneuvering is complete, the target is in the measurable scope of the space platform.
-
(3)
Closing sub-maneuver The TSR moves 1 km away from the S3 target by the closing maneuver guided by two thrusts. An inspection is conducted at this point.
-
(4)
In-plane detection sub-maneuver In this phase, a rough parameter estimation for the target should be completed. In-plane ellipse detection is conducted to inspect the basic parameters of the target. Then the TSR will come within 200 m of the target, i.e., point S4. At this point the gripper of TSR will be launched from the space platform which contains the launch subsystem and then fly to the target automatically.
-
(5)
Final maneuvers The gripper flies to the target after launch, then the GNC subsystem of the gripper supplies the relative pose information between the target and gripper during the approach phase. To approach the target directly and stably, the gripper needs to plan an optimal trajectory and work under coordinated control methods. When the relative pose is in accord with the capture condition, the gripper captures and locks the target. The orbit maneuvers of TSR are shown in Fig. 4.
-
(6)
Deorbit maneuvers After capture, the target is deorbited to a graveyard orbit or another orbit.

Mission scenario of TSR

Orbit maneuvers designed for TSR
3.2 Release/retrieval phase
When TSR’s tether length becomes kilometers long, the TSR dynamic model can be simplified as the classical TSS model. Because TSS’s dynamic model during the deployment and retrieval phase is generally consistent, most of the researchers tend to analyze TSS’s deployment and retrieval together. So we go about analyzing the characteristics of the TSS firstly.
3.2.1 Dynamics characteristic analysis
During the deployment and retrieval phase, the dynamic characteristics of the TSS are quite complicated. TSS dynamics have been simulated via three methods. The first two methods were established by Galerki (with lateral vibration to the strain or without lateral vibration to the strain). The third method is a lumped parameter method. Among these methods, the tether is assumed to be a series of point masses connected to each other by massless springs and revolute joints [54]. Li and Zhu [55] addressed a globally stable numerical modeling scheme with the Nodal Position Finite Element Method (NPFEM). In this approach, the Gaussian–Legendre Runge–Kutta is used for time integration. Meng [56, 57] proposed a universal dynamic TSR model and corresponding control scheme. Zhang [58] proposed a scheme to select a proper dynamics model for space debris removal which is captured by a Tethered Space Robot. Up to now, plenty of researches have been conducted on the characteristics of TSR. Mantri [59] investigated the system parameters which affect length during the deployment phase, and Yu [60] presented the effect of J2 perturbation on the tethered satellite during deployment and retrieval while accounting for heating effect to derive new dynamics. Yu [61] also analyzed the stability of equilibrium positions of the flexible TSS system considering the complicated external environments. In [78], TSR’s equilibrium conditions are derived and system’s equilibrium state’s the stability of the system equilibrium state is analyzed by utilizing Taylor expansion formula. Liu [62] analyzed dynamics of the space tug system with a short tether during deorbiting. Aleksander [63] focused on the research of the collision probability of Active Debris Removal (ADR) missions. Aslanov [64,65,66] deeply investigated the dynamics of large space debris removal using tethered space tug, considering the space tug thruster, atmospheric disturbance, gravitational torque, debris’s physical characteristic, the coupling between tether’s vibration and debris’s vibration and so on. Furthermore, Aslanov and his colleagues [67,68,69]also discussed swing principle in tether-assisted return mission from an elliptical orbit, chaotic attitude motion of a low-thrust tug-debris tethered system in a Keplerian orbit and the conditions of the payload separation from the tether. Soltani [70] investigated dynamic analysis and trajectory tracking of a tethered space robot.
3.2.2 Measurement of TSR
As the control input of the TSR system, the accuracy and robust reliability of the measurement system seem be of prime importance. During the deployment phase TSR will approach the target, the measurement of the target for the TSR relies on very important technology which can ensure the TSR tracks and captures the target. Huang [71] presented a method of a monocular real-time feature point tracking for TSRs at long distances. Cai [72, 73] presented an effective circle detector without relying on edge detection and designed a TSR visual servoing system based on a dynamic template matching method at close range; this included vision-based pose measurement and visual servo tracking methods for TSRs. Chen [74] studied a non-cooperative target grasping position prediction model for a Tethered Space Robot, which supports the TSR capture of the non-cooperative target in the future.
3.2.3 Control of TSR
By involving the orbit and attitude control, as well as tether’s elastic vibration control and dynamic stability control of the working condition, the control problem during the deployment and retrieval phase become extremely complicated. The research over TSR control can be mainly classified as the following three types: tether tension (length Rate) control, optical control, and tension control augmented with thrusters.
a. Tether tension and length rate control
In [75], the dynamics during the phases of releasing, approaching, and retrieval of TSS were taken into account and proposed as an intermediate scheme, i.e., an extension of the traditional scheme. In [76], a fast retrieval law for Tethered Satellite System was proposed and several corresponding control strategies put forth by researchers at the beginning of the twenty-first century. He [78] developed a stable control scheme containing a range-rate control algorithm for Tethered Satellite System with special focus on the phases of deploying, holding, and retrieving. Variable-length tethers have been explored in effort to avoid slack on the tethers during deployment; new control schemes have been designed accordingly [77]. Wen [79, 80] presented a tension controller with explicit tension constraint and saturation, which is closer to the practical situation. Wen [81] also presented a tension control law to stabilize the motions of a tethered space tug system during its deorbiting process by regulating the tension in the tether. A tethered satellite system consists of a space tether, which was considered as a discrete mass connected by inelastic links, was studied and proposed as an optimal methodology for deployment/retrieval [82]. Sun and Zhu [83, 84] proposed a brand new controller for tethered satellite deployment and retrieval, which is named Fractional Order Control. With use of this controller, the target can be deployed/retrieved stably and quickly via the tether. Furthermore, this method is also extended to other rigid–flexible coupling space structures [85]. Ma [86] proposed a novel adaptive sliding mode tension control method for the deployment of tethered satellite, where the input tension limitation is taken into account. Huang and Zhang [87] proposed a full control scheme for the target retrieval via flexible tether with unknown kinematic and dynamic parameters of the captured target. Meng [88] designed a twist suppression method of tethered towing for spinning space debris, where tether tension is investigated. Wang [89] proposed an underactuated attitude control law to stabilize a target using only a single tether. The tether tension torque required for attitude control is achieved by a manipulator for moving the tether attachment point. What’ more, Wang [90] explored a space tethered towing method to fulfill transfer and bounded tether tension to stabilize tether heading. In addition, Nohmi [91,92,93] focused on momentum and motion control of the tethered robot during casting, where angular momentum of the tethered robot can be controlled by proper motion of the tether attachment point. Wang [94] designed an attitude controller for the post-capture combination, which are realized by coordination of thrusters, tether tension and tethered space manipulator.
b. Optical control
Fujii [95] studied the optimal path during the deployment/retrieval phase and designed a corresponding feedback control law. This included research on new control schemes during the phase of deployment/retrieval for a tethered satellite consisting of a subsatellite, an elastic tether, and a main body [96]. Lakso [97] studied optimal trajectories during the tether deployment/retrieval phase based on direct collocation and nonlinear programming. Wen [98] studied the in and out-of-plane motion, of an elastically tethered subsatellite model, and proposed a nonlinear optimal control scheme for releasing and approaching. A nonlinear optimal feedback control involving the uncertainties in inertia parameters, the errors in initial conditions, and the disturbance of external forces, is presented [99]. Huang [100] developed an optimal controller based on the hp-adaptive pseudospectral approach which can lower the fuel consumption; varying mass and force distribution of the tether are both accounted for in the control scheme. Huang also proposed an optimal trajectory tracking scheme for TSRs based on velocity impulse [101].
c. Augmented tension control with thrusters
Mantellato [102] addressed issues relevant to the deployment operations of a multi-kilometer tape-shaped tether from an orbiting spacecraft with the aid of an inline low-thrust propulsion system located inside the tip mass to be deployed. Meng [103] proposed an adaptive dynamic inversion anti-windup controller to realize the retrieval for a non-cooperative target, tether tension force and thruster force were applied. During the deployment phase, fuel consumption is a critical problem for the TSR. Nakamura [104] designed a coordinated control of tension and thruster in approaching phase which neglected the altitude. Wang [105] presented a new control strategy which considered the tether attachment point as mobile, meaning coordinated control of tether tension and thruster force. Huang and Xu [106] investigated the coordinated control method of position and altitude of a TSR based on its translation and link motion, where the traditional position control force of the TSR is obtained through a linear quadratic regulator. After the control force is optimized, it comprises the tether tension and thrusts.
3.3 Capture and post-capture phase
Similar to the rigid manipulators, dynamics and control during capture and post-capture phase are very important for the success of the mission. The characteristics of the TSR are different from the classical space robot because of the existence of the space tether, especially in the capture and post-capture phase. Few researchers have devoted their attention to this complex problem.
Huang and Wang [107] presented a position-based impedance controller for uncooperative space debris capture and a neural network estimator to compensate for uncertainties, where the tether is described by lumped mass model. They proposed an adaptive scheme to overpower any disturbance the space tether may receive. Zhang [108] studied a tethered system for capturing rigid space debris and developed a new methodology for on-line inertia parameter estimation. Lu [109] proposed a fast terminal sliding mode controller for the post-capture combination attitude takeover control by TSR, where the control input constraints, tether oscillations and external disturbances are solved. What’s more, the control inputs are distributing over TSR’s thrusters. Taking orbit motion into consideration, Huang and Wang [110, 111] designed relevant control scheme which coordinates the tether force and thruster force to stabilize the post-capture combination, where the fuel consumption can be reduced. Taking into account the constraints on thruster and velocity of space tether, Wang [112] proposed a back-stepping control method to stabilize the combination, where command filter is utilized to guarantee the velocity of the space tether, feedback term is adopted to solve the thruster saturation. What’s more, an adaptive law is designed to estimate the disturbance of parameter uncertainties and disturbances.
3.4 Progress and challenges
The TSR features high flexibility and a large workspace, which is promising for future On-Orbit Servicing applications such as orbit maneuvering and space debris removal. Many researchers have explored the TSR in recent years, especially the dynamics and controls of the release and retrieval phase, and have made a great deal of progress. The TSR is a rather complex multi-body with highly coupled dynamics and requires more in-depth investigation. Capture and post-capture phases of TSR are quite complicated due to the existence of a space tether. So, researching this subject is rather challenging. In real situations, the target satellites are normally an uncooperative satellite or piece of space debris, which may be spinning satellites with nutation. The altitude and position control during capture and contact is thus much more complicated due to the flexible tether. The lack of practical ground test options is another challenge to verifying the feasibility of the proposed control strategy for TSRs.
4 Tethered space net
The prior proposal of large flexible structures involved large in-orbit antennas and solar-powered systems extended to a new application for OOS [113, 114]. In recent decades, as the tethered space capture device is becoming a promising solution for the space debris retrieval (especially in case of uncooperative captures), the TSN has become a popular research target.
In this section, some important conclusions regarding the traditional applications of TSN are discussed first as they serve as a foundation in TSN for in-orbit target capture. This is followed by the literature review on the release dynamics and control of TSN, which are crucial for capture missions. New improvements to the TSN are also reviewed below.
4.1 Tethered space net in early applications
Net shape and mesh geometric topology were not the focus in early studies on this subject [50]. Because centrifugal forces are used for release and deployment in a traditional TSN [115], the centrifugal force field leads to the non-uniform pre-stress distribution of the net. The entire net must have sufficient tension. Pre-stress in the net causes stiffness in the out-of-plane angle, which relies on the geometric topology of the mesh [116]. Stiffness and spinning of the net in the out-of-plane angle generate unsatisfactory altitude and positional motions of the net, namely oscillation transfer. These additional motions cause a reduction in the net’s performance [117]. An exact dynamics model and analysis for net shape and mesh geometric topology is critical, to this effect.
Maximum permissible sag-to-span ratios of different corner masses were investigated by Tibert and Gärdsback [114], who concluded that a large sag-to-span ratio produces undesirable pointier vertices. They also identified optimal dynamics and numerical simulations of triangular mesh [118, 119]. Schuerch and [120] proposed a quadrangular mesh that is able to withstand grand shearing deformations; this attribute is important for package design. Kyser [121] analyzed relationships of mesh geometry with uniform pre-stress. Since triangular, square, and hexagonal are the three prime topologies, many researchers have compared the structure and stresses among them to find that equilibrium geometry is determined by the force distribution [122,123,124,125,126]. Another important conclusion about the eigenfrequency and eigenmode of the TSN is that eigenfrequencies and free-vibration modes are important for the effects of traveling waves, out-of-plane damping requirements, and other phenomena such as orbital maneuvering [127,128,129].
Structure design of the net is also the focus of research for TSN, and the information gathered is the foundation of the space net. MacNeal [130] proposed a criterion for the structure design of space net. The optimal design of the net is governed via: (a) pre-stressability, (b) manufacturability, (c) mass, (d) stiffness normal to orbit plane, and (e) eigenfrequencies. Based on the aforementioned requirements, only square mesh is pre-stressable under centripetal force. A square web with a square mesh is the best option based on feasibility. Additionally, both the releasing velocity and bullet masses are determining factors of stiffness normal to the orbit plane and eigenfrequencies.
According to the special deployment required for space net, namely centrifugal deployment, a good folding structure design is crucial for proper release. Many researchers have explored folding patterns based on the basic dynamics of the flexible tether [131,132,133,134,135]. Scheel [132] developed a pattern with straight folding lines, while McInnes [133] proposed another folding pattern with 36 radial spars emanating from a central hub. Schuerch and [136] later derived a star-like shape folding pattern which allows the net to be folded into the central hub in the releasing subsystem.

Tethered space net
4.2 Tethered space net
The TSN is an extended application of the TSR shown in Fig. 5, which is another solution to Active Space Debris Removal. This kind of TSN is released from a platform satellite via a flexible tether [45]. Normally, this kind of TSN is used for space debris or uncooperative target capture, and other in orbit service.
4.2.1 Structure and configuration
The various applications of the TSN make its structure and configuration design different from that of the TSN in early applications. After the project Robotic Geostationary Orbit Restorer (ROGER) from ESA [45] was proposed for in orbit space debris and uncooperative satellite capture and retrieval, the TSN emerged as a good option because of its safety and large operation radius. The TSN is a good trade-off in Active Debris Removal (ADR) in particular. ESA also proposed e.Deorbit project, which may be the first inflight demonstration of ADR mission [137]. The mission design of e.Deorbit is similar to ROGER.
Generally, the TSN is catapulted through the release subsystem and the corner bullet masses propel the net forward. Benvenuto [138] gave a detailed design proposal for the TSN, including the net material, net size and configuration, mesh size and topology, and the closure device system. Then, they performed parabolic flight experiment to validate the net deployment process, namely, to validate the releasing subsystem and net ejection subsystem [139]. They also treated the design and experimental investigation of a tether-net and net gun device, intended to shoot a conical or pyramidal shaped net dragged by four terminal masses [140]. Recently, they focused on the architecture of the thrown-net dynamics simulator together with the set-up of the deployment experiment and its trajectory reconstruction results on a parabolic flight [141]. [142, 143] gave a detailed design description of the TSN including the mechanism of net ejection, configuration of the net, and configuration of the capture element. Zhai not only paid attention to ejection subsystem, but also designed data management subsystem, attitude and orbit control subsystem and target tracking [144], which was an overall design for TSN. Gao [145] studied launch scheme of space net capturing system by experiment and simulation. Sharf [146] described the design and testing of a debris containment system for use in a tether-net approach to space debris removal.
4.2.2 Releasing dynamics and contact dynamics of TSN
Releasing dynamics is always one of the hot spots in the research of TSN. Based on the research of single tether system and ground net, several methods have been proposed, such as rigid model [141, 147], mass-spring model [148, 149], absolute nodal coordinate formulation (ANCF) model [150] and cubic B-spline curve interpolation surface model [151]. Rigid model is the most common used model in tethered space system. It treats the tether as rigid body, the platform and the net as mass points, which is easy to derive and can better demonstrate the dynamics of tether. Based on this model, Zhai [141] presented a control strategy to compensate for error through tether tension. [143] also studied the performance of the motion equations in the deployment phase, including both free and non-free motions in circular orbit as well as the motion dynamics. A later study investigated the disturbance of orbital dynamics which may lead an altitude vibration [152]. Liu et al. [147] made some modifications of this model, in which the net was considered as four tethers. They studied the orbital motion of the system, relative altitude motion of the net and base satellite, and the dynamics of re-orbit after net capture. Mass-spring model can better reflect the configuration of TSN and it is always used for describing quadrilateral mesh net. Benvenuto, Salvi, and Lavagna [148] discussed the possible problems of TSN, namely the GNC issues, in the capture and removal phase. The collision detection, contact dynamics in capture, and tether tension in retrieval were all studied in this paper. Botta et al. [149] derived the mass-spring model of the net in Vortex Dynamics and simulated the deployment and capture phase of the net. Besides, they analyzed the deployment dynamics of space nets based on energy and momentum [153]. Absolute nodal coordinate formulation (ANCF) model can better describe the flexibility of the net, especially reflecting the flexibility between two nodes on the net. Shan et al. [150] derived the ANCF model of TSN and made comparison with conventional mass-spring model based on numerical simulations. The simulation results showed that ANCF model can be capable of describing the flexible of the net, while it was more computationally expensive. The validation of space net deployment modeling methods, including mass-spring method and ANCF method, is performed by parabolic flight experiment [154]. Cubic B-spline curve interpolation surface model can make the bridle and surface of the net more smooth and continuous and better for visualization. Gao et al. [151] were aimed to simulate the dynamic behavior of fishing net and visualize the fishing net based on cubic B-spline interpolation surface by simplifying the geometric model of the net.
Contact dynamics of TSN has been received much more attention in recent years. Benvenuto and his team [148] have researched all the aspects of contact, including modeling of the net and tethers, modeling of debris, collision detection, contact dynamics, closing mechanism and simulations of removal. They chose linear Hertz law for forces normal to the contact surface and a Coulomb friction model for tangential forces. Then, they [155] improved the contact model, in which the linear Hertz law was substituted as nonlinear continuous compliant model. Botta et al. [156] also focused on the contact dynamics of TSN. Based on the dynamics model of tether-nets with Vortex Dynamics mentioned above [149], they exploited a modified linear continuous compliant model for the normal contact force and a scaled box friction model and some regularization in the sticking regime. Recently, based on the previous work, they introduced microslip frictional models and applied the model to the simulation of capture of debris of cylindrical shape in microgravity and vacuum conditions [157]. Besides, they selected several contact models to make detailed comparison with the model they proposed. The simulation results demonstrated that the proposed model could better describe the capture of TSN for space debris. Shan et al. [158] studied the contact dynamic model of space net based on two methods, penalty-based method and impulse-based method. The simulation results showed that the both methods are effective to model the contact dynamics of the net.

Maneuvering tethered space net
4.3 Maneuverable tethered space net
It is clear that the research of traditional TSN is focused on the net eject and contact dynamics due to the characteristic of nonmaneuverability of TSN. Thus, there are little studies discuss the control issue of TSN. Huang et al. proposed a new configuration as an improvement to the traditional TSN called the Maneuverable Tethered Space Net Robot (MTSNR), which is shown in Fig. 6. The MTSNR is comprised of a main net and four maneuverable units at the four corners of the net that guide mass bullets in the TSN [159, 160]. Since the corners are maneuverable units are rigid and maneuverable bodies and the net is flexible, the dynamics of the MTSN are fairly complicated. Maneuverability may lead to the net being asymmetrical, which generates more complicated vibration motions of the flexible net. Thus, the studies about MTSNR focused on the releasing dynamics, dynamics analysis, and controller design. The releasing dynamics and stability control of MTSNR were implemented in [161], in which the structure of MTSNR was described in detail. Considering the elasticity of tether and the uncertainties from space environment, a second-order sliding mode control was employed for MTSNR. Then, based on the dynamic model in [161], both symmetrical and asymmetrical configurations were analyzed by Zhang et al. [162]. According to the specific vibration analysis, a modified Adaptive Super-Twisting Sling Mode Control scheme was also proposed for MTSNR. The issues concerning coupled dynamics modeling and shape maintenance in the deployment phase were examined by the same research team [162]. Recently, they derived a novel dynamics model and proposed a corresponding controller, which was a dual-loop control scheme with double optimization pseudo dynamics inversion and sliding mode control [160]. They [163] also studied the kinematics and dynamics of a formation-based space net system and derived an improved dynamics model by employing the extended Hamilton’s principle. In this paper, the inverse dynamics were transformed into a double-level optimization problem.
4.4 Progress and challenges
Although the TSN for active debris removal has become a promising approach for space debris removal in recent years, it is still at its very beginning stages compared to rigid capture in space. Since TSN uses a special cast deployment for in orbit capture, the tether is relatively short compared to the traditional Tethered Satellite System. This makes the coupled altitude motions of the platform satellite and of the space net highly significant. The capture phase is integral to the process in addition to approaching phase. Further, the necessary ground tests verify the key technologies such as ejection, deployment, capture, and retrieval may be challenging.
5 Tethered spacecraft formation
Formation flying has been considered as an efficient means to reduce expenses and add new potential missions for space-based programs [164]. Large spacecraft could be replaced by many smaller and less complicated satellites that make up a particular spatial configuration, and the satellites would communicate to share information. Compared to single large spacecraft, satellite formations are more flexible and reliable. Satellite formation technology has become the focus for developing future space mission technology accordingly.
Currently, satellite formation has been used in synthetic aperture radar satellite formation, distributed meteorological satellite stereoscopic imaging, high-resolution synthetic aperture optical interferomety, electronic surveillance, and more [165]. Spatial formation flight is complicated due to a number of factors, however, especially space environmental disturbance such as interference by gravity, air resistance, sunlight pressure, electromagnetism, and modeled force. This makes spatial formations difficult to employ for formation stability in the long term. Further, satellites have to consume large quantities of fuel to maintain stable configurations, so the service lives of the satellites in formation are greatly reduced.
Tethers can be applied to the satellites, connected to the spacecraft, remain taut, and the relative distances between spacecraft can be maintained accurately. A satellite formation connected by tethers is a “tethered satellite formation” which rotates along an axis or with thrusters. Gravity gradient or air resistance keeps the tether in tension and maintains the shape of the formation. The primary advantages of the usage of space tethers for space formation missions were summarized by Fedi [166]. The tether also has many disadvantages in space formation, however, including more complex deployment in tether dynamics which complicate controller design and practice, as well as the possibility of environmental deterioration and risk of collisions [167]. Tethered satellite formation has become a popular research object accordingly.
5.1 Structure and configuration
Many researchers have focused on two-body systems, since the initial applications of tethered spacecraft formation techniques involved only two bodies. Sarychev [168] investigated the equilibrium of a dumbbell system in circular Keplerian orbit in relation to the orbital reference frame. Lorenzini [169] investigated a satellite system with three end satellites: The Space Station, an end mass fixed 10-km away from the station via a Kevlar tether, and a gravity laboratory which is able to crawl along the tether. Pizarro [170] was dedicated to the dynamics of multi-tethered satellite formations. This system consists of two configurations. One is a central hub configuration containing a central body for the tether revolving spindle and a satellite fixed to the end of tether [171]. The other is a closed hub-and-spoke configuration, which is a series of satellites connected by tethers that add to the aforementioned configuration [172]. When spinning in the orbital plane, the hub-and-spoke configuration can stabilize the end bodies [178]. The feasibility of a rotating formation of satellites using flexible tethers was investigated by previous researchers. The system consisted of three spacecraft connected by tethers in a triangle-like formation [173]. The open-loop control scheme for deployment and retrieval was investigated in the same paper. Guerman [174] studied equilibrium of the tetrahedral configurations, i.e., four rigid bodies attached by three massless rods. The dynamic stability of a spinning triangular formation during the deployment and retrieval stages was also investigated [175]. Zhang investigated the source localization system and presented a rotating tether satellite formation which have a triangular configuration, and the localization system performance better than traditional one [176].
5.2 Dynamics and control
The dynamics and control of tethered satellite formations in flight have been studied extensively. Avanzini [172] explored the multi-tethered satellite formation by modeling the tether as a sequence of point masses and massless springs. The results showed that the dynamics model using a massless link to represent the tether is precise enough for parameter estimation and controller design during capture. A control scheme for tracking via the \(\theta \)-D technique was proposed by Liu [177] and shown to satisfy the TSS working on halo orbits. Another formation near liberation points in a spinning triangular formation was investigated by Lorenzini [169], including deriving dynamic motion equations and analyzing the dynamic characteristics of the system. Zhao [179] investigated formations composed by multi-satellites and tethers and derived corresponding full coupled dynamics models; the parent satellite was working on a large halo in 3D and the center point surrounded the second liberation point with respect to the Sun–Earth system. The orbit dynamics performed well even when initial spin rate was increased; similar results were obtained for other tether liberations. Pizarro examined the dynamics model of a hub-spoke formation [174]. Zhao [180] presented the dynamics of multi-tethered satellite formations in which subsatellites surround a parent satellite attached by varying-length tethers in a hub-spoke formation. Chung [181] investigated the multi-vehicle tethered spacecraft and established a corresponding nonlinear dynamics model; they found that both reshaping and spin-up are controllable only by the flying wheels and tether tension. Razzaghi Considered the perturbations of low Earth orbit and oblateness of earth, and derived the dynamics model of multi-tethered satellite formation. The aerodynamic drag perturbation is considered as external force, the J2 perturbation is regarded as potential energy [182].
Zhai aimed the problem of deployment for planar multi-tethered satellite formation, established the deployment dynamics, the parent satellite is treated as a finite sized rigid body and the deployment strategies presented [183]. Huang aimed the deployment and retraction of a rotating HS-TFS derived a dynamic model of the rotating HS-TFS and employed the Gauss pseudospectral method to solve the optimal deployment and retraction problems [184].
5.3 Formation control
It is necessary for the satellite formation to change the rotation direction in many missions such as interferometry observation [185]. Nakaya [186] discussed altitude maneuvers of a spinning tethered configuration system and presented a feedback maneuver control scheme based on the virtual configuration method as-proposed. Other researchers proposed that the configuration of a tethered satellite formation can be maintained or changed by using an active controller of both tether tension and length; a coordinate controller comprised of thrusters, fling wheels, and tether tension was also addressed [187]. Menon [188] investigated a tethered formation system consisted of two platforms linked by a flexible tether a few hundred meters long. A decentralized coordinated altitude control strategy was derived under the behavior-based control approach in another study [189]. Existing controllers can assure globally asymptotical reachability for a reference trajectory in the presence of model uncertainties and external perturbation [190]. Yarotsky aimed the “hub-and-spoke” configuration present a novel strategy to maintain the satellite formation in space [191]. Choosing the proper parameters of the system, the satellites can move to the local vertical, and along the Lissajours curves in the plane normal. Zhang invested the three-spacecraft array, and decoupled the system into three individual dynamics [192]. A feedback control law and a decentralized controller was presented to stabilize the center spacecraft and the single-tethered spacecraft especially.
Ma [193] aimed the problem of attitude regulation of the multi-satellite inline tethered system present a novel adaptive hierarchical sliding mode control, derived the attitude dynamic equations of the three-satellite system by utilizing Lagrangian mechanics theory. This control method considered the saturation of the control input and the external perturbation, and introduced an adaptive update rate to eliminate them.
5.4 Progress and challenges
Although there have been several studies on tethered spacecraft formation in recent years, there are still many problems in space tether flying formation. The majority of researchers assume the tether to be massless and inextensible, while few individuals take tether mass and elasticity into account in their studies. The folding and releasing control of the tethered spacecraft formation is a very important problem which merits further research, as does the reconfiguration of tethered spacecraft formation systems. Ground tests are also still necessary to verify the key technologies.
6 Conclusions
The space tether has become a popular research object by virtue of its many potential applications, particularly in regard to orbit manipulation. A vast amount of studies have been conducted on the subject and its derivatives related to a variety of applications and research aspects since the concept was first proposed. This literature review mainly focuses on the use of the space tether for in-orbit manipulation. Interested readers may consult our references for further reading on the subject. This review began with a concise introduction on the development of in-orbit manipulation, then proceeded to a brief synopsis of the applications in early stage, then to the main contribution: The applications of the space tether for in-orbit manipulation regarding TSR, TSN, and space tether flying formation.
There has been extensive research to date on the configure design, dynamics analysis, and control schemes of the space tether for in-orbit service. There are many problems yet to be addressed, however. For example, almost all the verifications on the dynamics and control strategies of these applications were facilitated by numerical simulations because of limited ground test conditions, which may greatly decrease the feasibility of these applications. There also is no material yet considered optimal for space tethers. As space technology continues to advance, the space tether is expected to be promising solution for in-orbit manipulation. The TSS for in-orbit service will certainly bring about a revolutionary change in our ability for space exploration and exploitation.
References
Tsiolkovsky, K.E.: Speculations Between Earth and Sky, p. 35. Isd-voAN-SSSR, Moscow (1895). (reprinted in 1959)
Ellery, A., Kreisel, J., Sommer, B.: The case for robotic on-orbit servicing of spacecraft: spacecraft reliability is a myth. Acta Astronaut. 63(5), 632–48 (2008)
Flores-Abad, A., Ma, O., Pham, K., et al.: A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 68, 1–26 (2014)
Shan, M., Guo, J., Gill, E.: Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 80, 18–32 (2016)
Huang, P., Wang, M., Meng, Z., et al.: Attitude takeover control for post-capture of target spacecraft using space robot. Aerosp. Sci. Technol. 51, 171–80 (2016)
Bele\({\mathop {\rm ts}}^{\frown }\)kiĭ, V.V., Levin, E.V.: Dynamics of space tether systems. Univelt Incorporated, San Diego (1993)
Pearson, J.: Konstantin Tsiolkovski and the origin of the space elevator. In: 48th IAF, International Astronautical Congress, Turin, Italy, vol. 10, pp. 6–10 (1997)
Chobotov, V.: Gravity-gradient excitation of a rotating cable-counterweight space station in orbit. J. Appl. Mech. 30(4), 547–54 (1963)
O’dell, C.R., York, D.G., Henize, K.G.: Structure of the barnard loop nebula as determined from Gemini 11 photographs. Astrophys. J. 150, 835 (1967)
Lang, D.D., Nolting, R.K.: Operations with Tethered Space Vehicles, vol. 138, p. 55. NASASpecial Publication, Wahington, DC (1967)
Colombo, G., Martinez-Sanchez, M., Arnold, D.: The use of tethers for payload orbit transfer. NASA Rep. 82, 26705 (1982)
Bekey, I.: Tethers open new space options. Astronaut. Aeronaut. 21(4), 32–40 (1983)
Bekey, I., Penzo, P.A.: Tether propulsion. Aerosp. Am. 24(7), 40–3 (1998)
Carroll, J.A.: Tether applications in space transportation. Acta Astronaut. 13(4), 165–74 (1986)
Kyroudis, G.A., Conway, B.A.: Advantages of tether release of satellites from elliptic orbits. J. Guid. Control Dyn. 11(5), 441–8 (1988)
Kumar, K., Kumar, R., Misra, A.K.: Effects of deployment rates and librations on tethered payload raising. J. Guid. Control Dyn. 15(5), 1230–5 (1992)
Yasaka, T.: Tumble orbit transfer of spent satellites. J. Spacecr. Rocket. 27(3), 348–50 (1990)
Bekey, I.: Tethering a new technique for payload deployment. Aerosp. Am. 35(3), 36–40 (1997)
Kumar, K.D.: Payload deployment by reusable launch vehicle using tether. J. Spacecr. Rocket. 38(2), 291–4 (2001)
Lorenzini, E.C., Cosmo, M.L., Kaiser, M., et al.: Mission analysis of spinning systems for transfers from low orbits to geostationary. J. Spacecr. Rocket. 37(2), 165–72 (2000)
Ziegler, S.W., Cartmell, M.P.: Using motorized tethers for payload orbital transfer. J. Spacecr. Rocket. 38(6), 904–13 (2001)
Kumar, K.D., Yasaka, T., Sasaki, T.: Orbit transfer of service vehicle/payload through tether retrieval. Acta Astronaut. 54(9), 687–98 (2004)
Bonnal, C., Missionnier, S., Malnar, B., et al.: Optimization of tethered de-orbitation of spent upper stages. In: Proceedings of 4th European Conference on Space Debris. ESA-SP-587, pp. 361–366 (2005)
Hyslop, A., Van Der Heide, E., Stelzer, M., et al.: Designed a micro-launcher with tethered upper stage. In: Proceedings of 57th International Astronautical Conference. IAC; IAC-06- D2.3.03:1-15 (2006)
Chobotov, V.: Gravitational excitation of an extensible dumbbell satellite. J. Spacecr. Rocket. 4(10), 1295–300 (1967)
Robe, R.Q.: Salt Flux in and Classification of the Columbia River Estuary During High and Low Discharge. University of Washington, Washington (1968). MS report
Misra, A.K., Diamond, G.S.: Dynamics of a subsatellite system supported by two tethers. J. Guid. Control Dyn. 9(1), 12–6 (1986)
Ciardo, S., Bergamaschi, S.: A new method for a tethered system aided space station assembly. In: Proceedings of AGARD, Space Vehicle Flight Mechanics. p(SEE N 90-27741 22-18) (1990)
Banerjee, A.K., Kane, T.R.: Pointing control, with tethers as actuators, of a space station supported platform. J. Guid. Control Dyn. 16(2), 396–9 (1993)
Kumar, K.: Satellite attitude stabilization through tether. Acta Astronaut. 35(6), 385–90 (1995)
Kumar, K., Kumar, K.D.: Open-loop satellite librational control in elliptic orbits through tether. Acta Astronaut. 41(1), 15–21 (1997)
Kurnar, K., Kumar, K.D.: Satellite attitude maneuver through tether: a novel concept. Acta Astronaut. 40(2), 247–56 (1997)
Kumar, K.D., Yasaka, T.: Satellite attitude stabilization through kite-like tether configuration. J. Spacecr. Rocket. 39(5), 755–760 (2002)
Janeski, JA.: Dynamics of an electrodynamic tether system in a varying space-plasma environment. PhD thesis, Virginia Polytechnic Institute and State University (2013)
Levin, E.M.: Dynamic Analysis of Space Tether Missions. Univelt Incorporated, San Diego (2007)
Aslanov, V.S., Ledkov, A.S.: Dynamics of Tethered Satellite Systems. Elsevier, Amsterdam (2012)
Hacker, B.C., Grimwood, J.M.: On the Shoulders of Titans: A History of Project Gemini, p. 4203. NASA Special Publication, Washington (1977). NASA SP-4203
Sasaki, S., Oyama, K.I., Kawashima, N., et al.: Tethered rocket experiment (Charge 2): initial results on electrodynamics. Radio Sci. 23(6), 975–988 (1988)
Van Pelt, M.: Space Tethers and Space Elevators. Springer Science & Business Media, Berlin (2009)
Cosmo, M.L., Lorenzini, E.C.: Tethers in Space Handbook. National Aeronautics and Space Administration, Washington (1997)
Jablonski, AM., Vigneron, FR., Tyc, G., et al.: OEDIPUS-C tether dynamics experiment. In: Proceedings of the 9th CASI Conference on Astronautics, Canadian Aeronautics and Space Institute, pp. 18–30 (1996)
Lanoix, E.: Tether sling shot assists–a novel approach to travelling in the solar system. In: Proceedings of the 9th CASI Conference on Astronautics-Towards the Next Century in Space, pp. 62–71 (1996)
Smith, HF.: The first and second flights of the small expendable deployer system (SEDS). In: Proceedings of the Fourth International Conference on Tethers in Space, pp. 43–55 (1995)
Purdy, W., Coffey, S., Barnds, WJ., et al.: TiPS- Results of a tethered satellite experiment. In: Proceedings of the Astrodynamics, pp. 3–23 (1997)
Bischof, B., Kerstein, L., Starke, J., et al.: ROGER-robotic geostationary orbit restorer. Sci. Technol. Ser. 109, 183–93 (2004)
Kruijff, M., van der Heide, E.J.: Qualification and in-flight demonstration of a European tether deployment system on YES2. Acta Astronaut. 64(9), 882–905 (2009)
Williams, P., Hyslop, A., Stelzer, M., et al.: YES2 optimal trajectories in presence of eccentricity and aerodynamic drag. Acta Astronaut. 64(7), 745–69 (2009)
Nohmi, M.: Initial experimental result of pico-satellite KUKAI on orbit. In: Proceedings of the International Conference on Mechatronics and Automation. IEEE, pp. 2946–2951 (2009)
Nohmi, M., Oi, K., Takuma, S., et al.: Solar paddle antenna mounted on pico-satellite KUKAI for amateur radio communication. In: Proceedings of the Second International Conference on Advances in Satellite and Space Communications. IEEE, pp. 31-36 (2010)
Cartmell, M.P., McKenzie, D.J.: A review of space tether research. Prog. Aerosp. Sci. 44(1), 1–21 (2008)
Kumar, K.D.: Review on dynamics and control of nonelectrodynamic tethered satellite systems. J. Spacecr. Rocket. 43(4), 705–20 (2006)
Huang, P., Zhang, F., Cai, J., et al.: Dexterous tethered space robot: design, measurement, control and experiment. IEEE Trans. Aerosp. Electron. Syst. 53(3), 1452–1468 (2017)
Zhai, G., Zhang, J.: Space tether net system for debris capture and removal. In: 4th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), IEEE, pp. 257–261 (2012)
Kim, E., Vadali, S.R.: Modeling issues related to retrieval of flexible tethered satellite systems. J. Guid. Control Dyn. 1(5), 650–660 (2012)
Li, G., Zhu, Z.: Long-term dynamic modeling of tethered spacecraft using nodal position finite element method and symplectic integration. Celest. Mech. Dyn. Astron. 123(4), 1–24 (2015)
Meng, Z., Huang, P.: Universal dynamic model of the tethered space robot. J. Aerosp. Eng. 29(1), 1–11 (2016)
Meng, Z., Huang, P.: An effective approach control scheme for the tethered space robot system. Int. J. Adv. Robot. Syst. 11, 1–14 (2014)
Zhang, F., Huang, P., Meng, Z., et al.: Dynamics modeling and model selection of space debris removal via the tethered space robot. Proc. IMechE Part G: J. Aerosp. Eng. 231(10), 1873–1897 (2017)
Mantri, P., Mazzoleni, A., Padgett, A.: Parametric study of deployment of tethered satellite systems. J. Spacecr. Rocket. 44(2), 412–424 (2007)
Yu, B., Jin, D.: Deployment and retrieval of tethered satellite system under J2 perturbation and heating effect. Acta Astronaut. 67(7–8), 845–53 (2010)
Yu, B., Jin, D., Wen, H.: Nonlinear dynamics of flexible tethered satellite system subject to space environment. Appl. Math. Mech. 37(4), 485–500 (2016)
Liu, J., Cui, N., Shen, F., et al.: Dynamics of the space tug system with a short tether. Int. J. Aerosp. Eng. 2015(2), 1–16 (2015)
Aleksander, A., Hugh, G., Roberto, A., et al.: Considering the collision probability of active debris removal missions. Acta Astronaut. 131, 10–17 (2017)
Aslanov, V., Vadim, Y.: Dynamics of large space debris removal using tethered space tug. Acta Astronaut. 91, 149–156 (2013)
Aslanov, V., Alexander, L.: Dynamics of towed large space debris taking into account atmospheric disturbance. Acta Mech. 225(9), 2685–2697 (2014)
Aslanov, V., Vadim, Y.: Dynamics, analytical solutions and choice of parameters for towed space debris with flexible appendages. Adv. Sp. Res. 55(2), 660–667 (2015)
Aslanov, V., Misra, A., Yudintsev, V.: Chaotic attitude motion of a low-thrust tug-debris tethered system in a Keplerian orbit. Acta Astronaut. 139, 419–427 (2013)
Aslanov, V., Ledkov, A.: Swing principle in tether-assisted return mission from an elliptical orbit. Aerosp. Sci. Technol. 71, 156–162 (2017)
Aslanov, V., Ledkov, A.: Tether-assisted re-entry capsule deorbiting from an elliptical orbit. Acta Astronaut. 130, 180–186 (2017)
Soltani, M., Keshmiri, M., Misra, A.: Dynamic analysis and trajectory tracking of a tethered space robot. Acta Astronaut. 128, 335–342 (2016)
Huang, P., Cai, J., Meng, Z., et al.: Novel method of monocular real-time feature point tracking for tethered space robots. J. Aerosp. Eng. 27(6), 1–14 (2014)
Cai, J., Huang, P., Meng, Z., et al.: A TSR visual servoing system based on a novel dynamic template matching method. Sensors 15(12), 32152–32167 (2015)
Cai, J., Huang, P., Meng, Z., et al.: An efficient circle detector not relying on edge detection. Adv. Sp. Res. 57(11), 2359–2375 (2016)
Chen, L., Huang, P., Cai, J., et al.: A non-cooperative target grasping position prediction model for tethered space robot. Aerosp. Sci. Technol. 58, 571–581 (2016)
Pascal, M., Djebli, A., El-Bakkali, L.: A new deployment/retrieval scheme for a tethered satellite system, intermediate between the conventional scheme and the crawler scheme. J. Appl. Math. Mech. 65(4), 689–696 (2001)
Djebli, A., El-Bakkali, L., Pascal, M.: On fast retrieval laws for tethered satellite systems. Acta Astronaut. 50(8), 461–470 (2002)
Tang, J., Ren, G., Zhu, W., et al.: Dynamics of variable-length tethers with application to tethered satellite deployment. Commun. Nonlinear Sci. 16(8), 3411–3424 (2011)
He, Y., Liang, B., Xu, W.: Study on the stability of tethered satellite system. Acta Astronaut. 68(11–12), 1964–1972 (2011)
Wen, H., Zhu, Z., Jin, D., et al.: Space tether deployment control with explicit tension constraint and saturation function. J. Guid. Control Dyn. 39(4), 916–921 (2016)
Wen, H., Zhu, Z., Jin, D., et al.: Exponentially convergent velocity observer for an electro-dynamic tether in an elliptical orbit. J. Guid. Control Dyn. 39(5), 1113–1118 (2016)
Wen, H., Zhu, Z., Jin, D., et al.: Constrained tension control of a tethered space-tug system with only length measurement. Acta Astronaut. 119, 110–117 (2016)
Williams, P.: Deployment/retrieval optimization for flexible tethered satellite systems. Nonlinear Dyn. 52(1–2), 159–179 (2008)
Sun, G., Zhu, Z.: Fractional order tension control for stable and fast tethered satellite retrieval. Acta Astronaut. 104(1), 304–312 (2014)
Sun, G., Zhu, Z.: Fractional-order tension control law for deployment of space tether system. J. Guid. Control Dyn. 37(6), 2057–167 (2014)
Sun, G., Zhu, Z.: Fractional-order dynamics and control of rigid-flexible coupling space structures. J. Guid. Control Dyn. 38(7), 1324–9 (2014)
Ma, Z., Sun, G.: Adaptive sliding mode control of tethered satellite deployment with input limitation. Acta Astronaut. 127, 67–75 (2016)
Huang, P., Zhang, F., Meng, Z., et al.: Adaptive control for space debris removal with uncertain kinematics, dynamics and states. Acta Astronaut. 128, 416–430 (2016)
Meng, Z., Wang, B., Huang, P.: Twist suppression method of tethered towing for spinning space debris. J. Aerosp. Eng. 30(4), 04017012-1-9 (2017)
Wang, B., Meng, Z., Huang, P.: Attitude control of towed space debris using only tether. Acta Astronaut. 138, 152–167 (2017)
Meng, Z., Wang, B., Huang, P.: A space tethered towing method using tension and platform thrusts. Adv. Space Res. 59, 656–669 (2017)
Nohmi, M., Nenchev, D., Uchiyama, M.: Momentum control of a tethered space robot through tether tension control. In: Proceedings of the 1998 IEEE International Conference on Robotics & Automation, pp. 920–925 (1998)
Nohmi, M., Nenchev, D., Uchiyama, M.: Tethered robot casting using a spacecraft-mounted manipulator. J. Guid. Control Dyn. 24(4), 827–833 (2001)
Nohmi, M., Dragomir, N., Uchiyama, M.: Motion control of a tethered space robot during casting. Trans. Jpn. Soc. Mech. Eng. 66(647), 2255–2261 (2000)
Wang, D., Huang, P., Meng, Z.: Coordinated stabilization of tumbling targets using tethered space manipulators. IEEE. Trans. Aerosp. Electron. Syst. 51(3), 2420–2432 (2015)
Fujii, H.A., Kojima, H.: Optimal trajectory analysis for deployment/retrieval of tethered subsatellite using metric. J. Guid. Control Dyn. 26(1), 177–179 (2003)
Kokubun, K., Fujii, H.A.: Deployment/retrieval control of a tethered subsatellite under effect of tether elasticity. J. Guid. Control Dyn. 19(1), 138–146 (2015)
Lakso, J.J., Coverstone, V.L.: Optimal tether deployment/retrieval trajectories using direct collocation. Urbana 51, 61801 (2000)
Wen, H., Jin, D., Hu, H.: Three-dimensional optimal deployment of a tethered subsatellite with an elastic tether. Int. J. Comput. Math. 85(6), 915–923 (2008)
Wen, H., Jin, D., Hu, H.: Optimal feedback control of the deployment of a tethered subsatellite subject to perturbations. Nonlinear Dyn. 51(4), 501–514 (2008)
Huang, P., Hu, Z., Meng, Z.: Coupling dynamics modeling and optimal coordinated control of tethered space robot. Aerosp. Sci. Technol. 41, 36–46 (2015)
Huang, P., Xu, X., Meng, Z., et al.: Optimal trajectory planning and coordinated tracking control method of tethered space robot based on velocity impulse. Int. J. Adv. Robot. Syst. 11(8), 1–17 (2014)
Mantellato, R., Valmorbida, A., Lorenzini, C.: Thrust-aided librating deployment of tape tethers. J. Spacecr. Rocket. 52(5), 1–12 (2008)
Meng, Z., Wang, B., Huang, P., et al.: In-plane adaptive retrieval control for a non-cooperative target by tethered space robots. Int. J. Adv. Robot. Syst. 52(5), 1–12 (2016)
Nakamura, Y., Sasaki, F., Nakasuka, S.: Guidance and control of tethered retriever with collaborative tension-thruster control for future on-orbit service missions. In: Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), pp. 5–8 (2005)
Wang, D., Huang, P., Cai, J., et al.: Coordinated control of tethered space robot using mobile tether attachment point in approaching phase. Adv. Sp. Res. 54(6), 1077–1091 (2014)
Huang, P., Zhang, F., Xu, X., et al.: Coordinated coupling control of tethered space robot using releasing characteristics of space tether. Adv. Sp. Res. 57(7), 1528–1542 (2016)
Huang, P., Wang, D., Meng, Z., et al.: Impact dynamic modeling and adaptive target capturing control for tethered space robots with uncertainties. IEEE-ASME Trans. Mech. 21(5), 2260–2271 (2016)
Zhang, F., Sharf, I., Misra, A.K., et al.: On-line estimation of inertia parameters of space debris for its tether-assisted removal. Acta Astronaut. 107, 150–162 (2015)
Lu, Y., Huang, P., Meng, Z., et al.: Finite time attitude takeover control for combination via tethered space robot. Acta Astronaut. 136, 9–21 (2017)
Huang, P., Wang, D., Meng, Z., et al.: Post-capture attitude control for a tethered space robot-target combination system. Robotica 33(4), 898–919 (2015)
Huang, P., Wang, D., Meng, Z., et al.: Adaptive postcapture backstepping control for tumbling tethered space robot-target combination. J. Guid. Control Dyn. 39(1), 150–156 (2016)
Huang, P., Wang, D., Zhang, F., et al.: Postcapture robust nonlinear control for tethered space robot with constraints on actuator and velocity of space tether. Int. J. Robust Nonlinear Control 27(16), 2824–2841 (2017)
Grossman, J.: Solar sailing: the next space craze? Eng. Sci. 63(4), 18–29 (2000)
Tibert, G., Gardsback, M.: Space webs final report. ESA/ACT, Adriana ID: 05, 4109 (2006)
Kaya, N., Iwashita, M., Nakasuka, S., et al.: Crawling robots on large web in rocket experiment on Furoshiki deployment. J. Br. Interplanet. Soc. 58(11–12), 403–6 (2005)
Tibert, G.: Deployable Tensegrity Structures for Space Applications. Royal Institute of Technology, Stockholm (2002)
Nakasuka, S., Kaya, N.: Quick release on experiment results of mesh deployment and phased array antenna by S-310-36. The Forefront of Space Science (2006)
Robbins Jr, WM.: Spinning paraboloidal tension networks (1967)
Robbins Jr., W.M.: The Feasibility of an Orbiting 1500-Meter Radiotelescope. National Aeronautics and Space Administration, Washington (1967)
Schürch, HU., Hedgepath, JM.: Large low-frequency orbiting radio telescope. National Aeronautics and Space Administration, Washington, DC. NASA contractor report, NASA CR-1201, 1 (1968)
Sepetoski, W.K., Pearson, C.E., Dingwell, I.W., et al.: Uniform-stress spinning filamentary disk. AIAA J. 3(7), 1313–1316 (1965)
Schek, H.J.: The force density method for form finding and computation of general networks. Comput. Methods Appl. Mech. Eng. 3(1), 115–34 (1974)
Tibert, G.: Numerical analyses of cable roof structures. KTH (1999)
Lai, C., You, Z., Pellegrino, S.: Shape of deployable membrane reflectors. J. Aerosp. Eng. 11(3), 73–80 (1998)
Young, W.C., Budynas, R.G.: Roark’s Formulas for Stress and Strain. McGraw-Hill, New York (2002)
Pickett, W.L., Pratt, W.D., Larson, M.L., et al.: Testing of centrifugally deployed membrane dynamics in an ambient ground environment. In: 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Denver, CO (2002)
Cook, R.D.: Concepts and Applications of Finite Element Analysis. Wiley, New York (2007)
Eversman, W.: Some Equilibrium and free Vibration Problems Associated with Centrifugally Stabilized Disk and Shell Structures. National Aeronautics and Space Administration, Washinton (1968)
Guest, S.: The stiffness of prestressed frameworks: a unifying approach. Int. J. Solids Struct. 43(3), 842–54 (2006)
Mac Neal, R.H.: Meteoroid Damage to Filamentary Structures. National Aeronautics and Space Administration, Washington (1967)
Guest, SD., Pellegrino, S.: Inextensional wrapping of flat membranes. In: Proceedings of the First International Seminar on Structural Morphology, vol. 25 (1992)
Scheel, H.: Space-saving storage of flexible sheets: U.S. Patent 3,848,821. 1974-11-19
McInnes, C.R.: Solar Sailing: Technology, Dynamics and Mission Applications. Springer Science & Business Media, Berlin (2013)
Koshelev, V.A., Melnikov, V.M.: Large Space Structures Formed by Centrifugal Forces. CRC Press, Boca Raton (1998)
Denavit, J.: A kinematic notation for lower-pair mechanisms based on matrices. J. Appl. Mech. 22, 215–221 (1955)
Schuerch, H.U.: Deployable Centrifugally Stabilized Structures for Atmospheric Entry from Space. National Aeronautics and Space Administration, Washington (1964)
Biesbroek, R.: The e.deorbit study in the concurrent design facility. In: Presentation Handouts, Workshop on Active Space Debris Removal, Darmstadt, Germany, vol. 17 (2012)
Benvenuto, R.: Implementation of a net device test bed for space debris active removal feasibility demonstration. M.S. thesis, Politecnico di Milano (2012)
Lorenzo, A., Stefanescu, R., Benvenuto, R., Marcon, M., Lavagna, M.: Validation results of satellite mock-up capturing experiment using nets. In: 66th International Astronautical Congress, Jerusalem, Israel, vol. 365 (2015)
Benvenuto, R., Carta, R.: Active debris removal system based on tethered-nets: experimental results. In: Proceedings of the 9th PEGASUS-AIAA Student Conference, Milano, Italy, vol. 4, p. 20 (2013)
Medina, A., Cercós, L., Stefanescu, R.M., et al.: Validation results of satellite mock-up capturing experiment using nets. Acta Astronaut. 134, 314–332 (2017)
Zhai, G., Qiu, Y., Liang, B., et al.: System dynamics and feedforward control for tether-net space robot system. Int. J. Adv. Robot. Syst. 6(2), 137–144 (2009)
Zhai, G., Zhang, J., Yao, Z.: Circular orbit target capture using space tether-net system. Math. Probl. Eng. (2013)
Zhai, G., Zhang, J.: Space tether net system for debris capture and removal. In: 2012 4th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, pp. 257–261 (2012)
Gao, Q., Zhang, Q., Feng, Z., et al.: Study on launch scheme of space-net capturing system. PLoS ONE 12(9), e0183770 (2017)
Sharf, I., Thomsen, B., Botta, E.M., et al.: Experiments and simulation of a net closing mechanism for tether-net capture of space debris. Acta Astronaut. 139, 332–343 (2017)
Liu, H., Zhang, Q., Yang, L., et al.: Dynamics of tether-tugging reorbiting with net capture. Sci. China Technol. Sci. 57(12), 2407–2417 (2014)
Benvenuto, R., Salvi, S., Lavagna, M.: Dynamics analysis and gnc design of flexible systems for space debris active removal. Acta Astronaut. 110, 247–265 (2015)
Botta, E., Sharf, I., Misra, A.K., et al.: On the simulation of tether-nets for space debris capture with Vortex dynamics. Acta Astronaut. 123, 91–102 (2016)
Shan, M., Guo, J., Eberhard, G.: Deployment dynamics of tethered-net for space debris removal. Acta Astronaut. 132, 293–302 (2017)
Gao, S., Yin, Y., Sun, X.: Dynamic Simulation of Fishing Net Based on Cubic B-Spline Surface. AsiaSim, pp. 141–148. Springer, Berlin (2012)
Zhai, G., Qiu, Y., Liang, B., et al.: On-orbit capture with flexible tether-net system. Acta Astronaut. 65(5), 613–23 (2009)
Botta, E.M., Sharf, I., Misra, A.K.: Energy and momentum analysis of the deployment dynamics of nets in space. Acta Astronaut. 140, 554–564 (2017)
Shan, M., Guo, J., Gill, E., et al.: Validation of space net deployment modeling methods using parabolic flight experiment. J. Guid. Control Dyn. 40(12), 3319–3327 (2017)
Benvenuto, R., Lavagna, M., Salvi, S.: Multibody dynamics driving GNC and system design in tethered nets for active debris removal. Adv. Sp. Res. 58, 45–63 (2016)
Botta, E., Sharf, I., Misra, A.K.: On the modeling and simulation of tether-nets for space debris capture. In: Proceedings of the 25th AAS/AIAA Space Flight Mechanics Meeting, Williamsburg, VA, AAS 15–260 (2015)
Botta, E., Sharf, I., Misra, A.K.: Contact dynamics modeling and simulation of tether nets for space-debris capture. J. Guid. Control Dyn. 40(1), 110–123 (2017)
Shan, M., Guo, J., Gill, E.: Contact dynamic models of space debris capturing using a net. Acta Astronaut (2017). https://doi.org/10.1016/j.actaastro.2017.12.009
Huang, P., Zhang, F., Ma, J., et al.: Dynamics and configuration control of the maneuvering-net space robot system. Adv. Sp. Res. 55(4), 1004–14 (2015)
Meng, Z., Huang, P., Guo, J.: Approach modeling and control of an autonomous maneuverable space net. IEEE Trans. Aerosp. Electron. Syst. 53(6), 2651–2661 (2017)
Zhang, F., Huang, P.: Releasing dynamics and stability control of maneuverable tethered space net. IEEE-ASME Trans. Mechatron. 22(2), 983–993 (2017)
Zhang, F., Huang, P., Meng, Z., et al.: Dynamics analysis and controller design for maneuverable tethered space net robot. J. Guid. Control Dyn. 40(11), 2828–2843 (2017)
Huang, P., Hu, Z., Zhang, F.: Dynamic modelling and coordinated controller designing for the manoeuvrable tether-net space robot system. Multibody Syst. Dyn. 36(2), 115–141 (2016)
Guo, J., Gill, E.: DelFFi: formation flying of two CubeSats for technology, education and science. Int. J. Sp. Sci. Eng. 1, 113–27 (2013)
Huang, P., Liu, B., Zhang, F.: Configuration maintaining control of three-body ring tethered system based on thrust compensation. Acta Astronaut. 123, 37–50 (2016)
Fedi, Casas M.: Dynamics and control of tethered satellite formations in low-Earth orbits. PhD thesis, Universitat Politecnica de Catalunya (2015)
Williams, T., Moore, K.: Dynamics of tethered satellite formations. Adv. Astronaut. Sci. 112, 1219–35 (2002)
Sarychev, V.A.: Positions of relative equilibrium for two bodies connected by a spherical hinge in a circular orbit. Cosmic Res. 5, 314 (1967)
Lorenzini, E.C.: A three-mass tethered system for micro-g/variable-g applications. J. Guid. Control Dyn. 10(3), 242–9 (1987)
Pizarro-Chong, A., Misra, A.: Dynamics of a multi-tethered satellite formation. In: Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, Rhode Island, 16-9 (2004)
Kumar, K., Yasaka, T.: Rotation formation flying of three satellites using tethers. J. Spacecr. Rocket. 41(6), 973–85 (2004)
Avanzini, G., Fedi, M.: Refined dynamical analysis of multi-tethered satellite formations. Acta Astronaut. 84, 36–48 (2013)
Pizarro-Chong, A., Misra, A.: Dynamics of multi-tethered satellite formations containing a parent body. Acta Astronaut. 63(11), 1188–202 (2008)
Guerman, A., Smirnov, G., Paglione, P., et al.: Stationary configurations of a tetrahedral tethered satellite formation. J. Guid. Control Dyn. 31(2), 424–428 (2008)
Misra, A., Modi, V.: A survey on the dynamics and control of tethered satellite systems. Tethers. Sp. 62, 667–719 (1987)
Zhang, S., Huang, Z., Hu, D.: Investigation on source localization performance using rotating tethered satellite formation. In: 8th International Conference on Wireless Communications & Signal Processing. IEEE, pp. 1–5 (2016)
Liu, G., Huang, J., Ma, G., et al.: Nonlinear dynamics and station-keeping control of a rotating tethered satellite system in halo orbits. Chin. J. Aeronaut. 26(5), 1227–37 (2013)
Cai, Z., Li, X., Zhou, H.: Nonlinear dynamics of a rotating triangular tethered satellite formation near libration points. Aerosp. Sci. Technol. 42, 384–91 (2015)
Zhao, J., Cai, Z.: Nonlinear dynamics and simulation of multi-tethered satellite formations in Halo orbits. Acta Astronaut. 63(5), 673–81 (2008)
Zhao, J., Cai, Z., Qi, Z.: Dynamics of variable-length tethered formations near libration points. J. Guid. Control Dyn. 33(4), 1172–83 (2010)
Chung, S., Kong, E., Miller, D.: Dynamics and control of tethered formation flight spacecraft using the SPHERES testbed. In: Proceedings of the AIAA Guidance, Navigation and Control Conference. San Francisco, AIAA [AIAA 05-6089] (2005)
Razzaghi, P., Assadian, N.: Study of the triple-mass Tethered Satellite System under aerodynamic drag and J2 perturbations. Adv. Sp. Res. 56, 2141–50 (2015)
Zhai, G., Su, F., Zhang, J., Liang, B.: Deployment strategies for planar multi-tethered satellite formation. Aerosp. Sci. Technol. 71, 475–84 (2017)
Huang, P., Zhao, Y., Zhang, F., et al.: Deployment/retraction of the rotating hub-spoke tethered formation system. Aerosp. Sci. Technol. 69, 495–503 (2017)
Quadrelli, M.: Modeling and dynamics analysis of tethered formations for space interferometry. In: Proceedings of the AAS/AIAA Space Light Mechanics Meeting, AAS [AAS 01-231] (2001)
Nakaya, K., Matunaga, S.: On attitude maneuver of spinning tethered formation flying based on virtual structure method. In: Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, AIAA [AIAA 05-6088] (2005)
Mori, O., Matunaga, S.: Formation and attitude control for rotational tethered satellite clusters. J. Spacecr. Rocket. 44(1), 211–20 (2007)
Menon, C., Bombardelli, C.: Self-stabilising attitude control for spinning tethered formations. Acta Astronaut. 60(10), 828–33 (2007)
Liang, H., Wang, J., Sun, Z.: Robust decentralized coordinated attitude control of spacecraft formation. Acta Astronaut. 69(5), 280–8 (2011)
Cai, Z., Li, X., Wu, Z.: Deployment and retrieval of a rotating triangular tethered satellite formation near libration points. Acta Astronaut. 98, 37–49 (2014)
Yarotsky, D., Sidorenko, V., Pritykin, D.: Three-dimensional multi-tethered satellite formation with the elements moving along lissajous curves. Celest. Mech. Dyn. Astron. 125(3), 309–32 (2016)
Zhang, Z., Yang, H., Jiang, B.: Decentralized fault tolerant control for Tethered Formation spacecraft. In: Youth Academic Annual Conference of IEEE Chinese Association of Automation, pp. 207–212 (2016)
Ma, Z., Sun, G.: Adaptive hierarchical sliding mode control with input saturation for attitude regulation of multi-satellite tethered system. J. Astronaut. Sci. 64, 207–30 (2017)
Acknowledgements
This research is Supported by the National Science Fund for Distinguished Young Scholars (Grant No: 61725303), and National Natural Science Foundation of China (Grant No: 61773317).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Huang, P., Zhang, F., Chen, L. et al. A review of space tether in new applications. Nonlinear Dyn 94, 1–19 (2018). https://doi.org/10.1007/s11071-018-4389-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4389-5