
Abstract
Over the last two decades, the approach to the investigation of landslides has changed dramatically. The advent of new technologies for engineering geological surveys and slope analyses has led to step-change increases in the quality of data available for landslide studies. However, the use of such technologies in the survey and analysis of slopes is often complex and may not always be either desirable or feasible. In this context, this paper aims to improve the understanding of the use of remote sensing techniques for rock mass characterization and provide guidance and on how and when the data obtained from these techniques can be used as input for stability analyses. Advantages and limitations of available digital photogrammetry and laser scanning techniques will also be discussed in relation to their cost and the quality of data that can be obtained. A critique of recent research data obtained from remote sensing techniques is presented together with a discussion on use of the data for slope stability analysis. This highlights how data use may be optimized to reduce both parameter and model uncertainty in future slope analyses.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The use of remote sensing techniques allows acquisition of detailed information on both the slope and discontinuity geometry for study of landslide susceptibility and potential rock slope instability mechanisms. Several authors have discussed the use of digital photogrammetry (DP) and laser scanning (LS) in the study of natural and engineered slopes (Ghirotti and Genevois 2007; Coggan et al. 2007; Lato et al. 2009; Sturzenegger and Stead 2009a, b; Salvini et al. 2013; Francioni et al. 2014, 2015; Spreafico et al. 2016). These techniques allow the acquisition of very detailed information on the structural setting and slope geometry, particularly important in the case of steep inaccessible slopes. These data can provide very useful input parameters for stability analyses, especially when considering the wide range of software now available for both conventional and numerical methods of slope analyses (Stead and Coggan 2012; Stead and Wolter 2015).
The principal aim of our research is to show the use of remote sensing techniques for providing the necessary data for the varied methods of slope analysis. Long- and short-range terrestrial laser scanning and four approaches to photogrammetric survey will be presented, i.e. tripod, aerostatic balloon, helicopter and unmanned aerial vehicle (UAV) or drones. The data obtained from these different survey techniques can be used in conventional (kinematic, limit equilibrium and rockfall) and more sophisticated numerical (continuum, discontinuum and hybrid and rockfall run out) methods of analysis. The potential use of other forms of remote sensing in slope investigations including airborne and mobile laser scanning, aircraft photogrammetry, thermal and hyperspectral imaging and full waveform analysis will also be briefly addressed.
Among conventional methods, kinematic analysis remains the simplest method to study rock slope stability and can be extremely useful in preliminary assessment of potential instability mechanisms. Results from this analysis are strictly related to the geometric orientation of discontinuity surfaces relative to the slope. It is important that structural domains be identified and that the measured discontinuity parameters representative of the area be assessed. In this context, DP and LS are ideally suited to collect input data that are more representative of the study area, which may often be inaccessible to conventional methods of discontinuity data collection. As part of the analysis, it is essential that the variation in discontinuity sets and their orientation within a slope be assessed and the effect of structural geology on slope stability be fully considered. The use of remote sensing methods allows such spatial variations in structure (with slope height and along the slope) to be investigated more comprehensively and efficiently. Francioni et al. (2015) showed how interpolation of remotely sensed data using GIS techniques can be used to perform a more rigorous deterministic kinematic analysis of slopes.
When using limit equilibrium methods, the geometry of discontinuities and slopes is considered together with force and/or moment equilibrium conditions. DP and LS data can be integrated with conventional engineering geological surveys and used for deterministic and probabilistic stability analysis. The geometry of the rock blocks and the discontinuities obtained from remote sensing techniques and the physical characteristics of discontinuities and rock mass from both engineering geological survey and close-range LS/photogrammetry can be used to calculate the factor of safety of the blocks within the slope (Salvini et al. 2011, 2013). Conventional limit equilibrium slope stability analysis can also be supplemented by rockfall calculations for risk and hazard assessments. This is particularly important for the definition of areas that can be affected by potential rockfall and for the subsequent creation of hazard maps (maps highlighting area of potential instability and/or rockfall). DP and LS can play a key role in defining the geometry and topography of the slope and the land cover which are all essential input data in rockfall run out simulation.
Numerical modelling has been increasingly used in recent years for stability analyses (Brideau and Stead 2010; Brideau et al. 2011; Stead and Coggan 2012; Francioni et al. 2014, 2015; Stead and Wolter 2015; Spreafico et al. 2016, 2017). The reliability of a numerical model is, however, connected to the quality of input data and the assumed constitutive models and failure mode. DP and LS can greatly improve the quantity and quality of the available data for slope analysis and can also be used, where appropriate, to create sophisticated stochastic discrete fracture networks (DFN) for incorporation into numerical models.
2 Remote sensing sensors
2.1 Digital photogrammetry
In the last two decades, the availability of new survey techniques and software processing tools has resulted in a marked increase in the use of DP.
Conventional acquisition methods include independent convergent, image fan and image strip models (Fig. 1a–c). These methods are explained in detail by Birch (2006), and their application discussed by Sturzenegger and Stead (2009a, b), the choice of method being decided according to site-specific slope conditions. Figure 1a shows the independent convergent model; the advantage of this method is that almost 100% of the images are used to build the model and if multiple models are required to cover the slope, very little overlap is required between models. Figure 1b shows the image fan method; this is similar to the independent method with the exception that the images are captured from specific camera locations (which are not independent). In this way, there are fewer unknowns to be determined (since the camera positions are the same) and the precision of the models is greater; this can be used also with high focal length lenses for long-range photogrammetry (Sturzenegger and Stead 2009a, b; Birch 2006). The last method is the image strip setup (Fig. 1c) where a series of parallel images with a typical 60% overlap is required. The high degree of overlap between images results in precise orientation of the model, significantly reducing the number of control points required. This method, in addition to being suitable for aerial photogrammetry, is also used in terrestrial photogrammetry when the stations and the outcrop are not very far apart (as the distance becomes larger, depth accuracy is reduced) and the slope is not very high. A typical example of the use of this method is in the survey of underground tunnels when the distance between the camera and the rock wall is small and the acquisition of a series of parallel images is the easiest way to proceed.
The coordinates of the camera location or the coordinates of ground control points located in the surveyed area are required to scale/georeference the photogrammetric models. In recent years, the use of structure from motion (SfM) imaging techniques (and software) has increased significantly making the routine use of photogrammetry in engineering practice easier and even more attractive. Although SfM still requires the use of ground control points to scale/georeference the model, the creation of the 3D model is much easier and faster. This is due to a highly redundant bundle adjustment based on matching features in multiple overlapping photographs (Fig. 1d). An introduction to this technique is given by Westoby et al. (2012), while applications of SfM techniques in engineering practice have been recently presented by Lucieer et al. (2014) and Salvini et al. (2015b).

Photogrammetric acquisition methods (Birch 2006) and structure from motion. a Independent convergent model. b Image fan method. c Image strip method. d Structure from motion
Another type of acquisition technique is the use of stereo cameras rigidly mounted that allow the acquisition of photographs from two cameras with a known baseline (distance between the cameras) (Firpo et al. 2011; Francioni et al. 2014). In such cases, the baseline is known and if the camera is calibrated, it is possible to reconstruct a scaled 3D photogrammetric model.
2.2 Laser scanning
LS allows the remote acquisition of information from an observed object including both morphological characteristics (altitude, spatial coordinates, etc.) and physical properties, e.g. the intensity of the reflected signal that can be correlated with the object material, temperature, humidity, etc.
LS can also involve both short- and long-range acquisition. Long-range laser scanners (up to 6 km) are particularly useful for wide and high rock slopes. It is possible to set up the laser scanner at a considerable distance from the slope, hence decreasing the number of occlusions when working with very elevated slopes. Moreover, because of accessibility issues, sometimes it is not possible to set up the instrument close to the slope, and without a long-range laser scanner, the acquisition would not be possible. The recent use of long-range LS for landslide analysis is documented by Barbarella et al. (2015).
Short-range laser scanners are fast and very precise with a wide vertical field of view and for these reasons have mostly been used in engineering geology in underground mining and for small rock slopes, where the instrument can (or has to) be set close to the slope (Francioni et al. 2013, 2014).
Time-of-flight and phase difference are the two types of measurement principles by which laser scanners obtain geometric and physical data. An introduction to these techniques, and laser scanner specifications, are highlighted by Beraldin (2004) and Fröhlich and Mettenleiter (2004). Time-of-flight has been the most used measurement technique to date; it allows for measuring the geometry and the reflectivity of an object from a few metres to kilometres in distance. The newly available phase difference measurement terrestrial laser scanners (full waveform LS) have seen considerable research in the last few years. With this technology, it is possible to capture additional metrics of the rock slope surface, which allow significantly reduced uncertainties in change detection (Afana et al. 2013). Using this approach, geometric and radiometric target surface information can be obtained and, at the same time, retain the spatially rich detailed point clouds.
The advent of full waveform LS makes the LS techniques more attractive, but it has to be noted that the cost of full waveform LiDAR technology is currently significantly higher than of time-of-flight instruments and DP.
3 Remote sensing platforms
3.1 Ground-based platforms
Ground-based remote sensing instrument platforms such as tripods, hand-held devices and vehicles are commonly used in engineering geology. Although these systems are simple to use and cost-effective, they have significant limitations related to the slope elevation; when a survey has to be conducted at the bottom of a high slope, occlusions can seriously compromise the final model (Lato et al. 2009; Francioni et al. 2014). Sturzenegger and Stead (2009a, b) highlighted the importance of understanding possible bias related to the use of this technique and how the results can be affected by occlusions. Nevertheless, this method has been successfully used by several authors in the analysis of rock slopes (Haneberg et al. 2006; Bonilla-Sierra et al. 2015; Havaej et al. 2016). In the following sections, the most common types of platform for slope surveys are presented.
3.1.1 Ground-based digital photogrammetry with hand-held camera or tripod
A hand-held camera or tripod are the simplest and most convenient photogrammetric survey methods. The use of a tripod results in acquisition of high-quality photographs and reduces the distortions related to camera vibrations. Another advantage of the use of a tripod is the possibility to perform long-range photogrammetry (Sturzenegger and Stead 2009a, b). It is also possible to use a tripod together with a reamed bar in order to maintain a constant line of sight and to precisely control the distance between sequential photographs (Salvini and Francioni 2013). Figure 2a, b shows the application of this technique with and without a reamed bar, respectively, in two case studies, a rock outcrop along the “Sea to Sky Highway” in British Columbia, Canada, and in a Carrara marble quarry, Italy.

Photogrammetric image acquisition using a a tripod and b a tripod with a reamed bar
A GigaPan (2016) robotic tripod may be used for both producing high-resolution panoramas of rock slopes and conventional acquisition of images for photogrammetry.
The use of hand-held camera survey technique has increased markedly with the advent of SfM techniques as they overcome some of the limitations related to the position of the camera, and using a consistent number of images, it is possible to obtain a detailed 3D model of the study area.
3.1.2 Ground-based laser scanning with tripod
Ground-based LS or terrestrial LiDAR is a survey technique for rapidly obtaining high precision slope geometry and deriving geological structure. One of the most difficult steps in using terrestrial LS is the point cloud registration which allows for the integration of several point clouds into a unique reference system (Francioni et al. 2014). Francioni et al. (2014) showed how this problem can be solved using an integrated topographic system. Moreover, some of the most recent software for point cloud management has built-in modules for the automatic registration of point clouds based on the recognition of common points between different point clouds (ICP–iterative closest point, Besl and Mckay 1992).
Figure 3 shows two 3D representations of an outcrop located along the Sea to Sky Highway, BC, Canada, obtained using a tripod and a Riegl VZ4000 scanner (very long-range laser scanner with online waveform processing; Riegl 2014). Figure 3a shows the 3D model of the road cut visualized using the RGB information gained from the internal digital camera of the laser scanner. Figure 3b shows the same outcrop visualized as the wave amplitude (dB). The use of waveform analysis (in this case wave amplitude) allows recognition and highlighting of different rock types. It is clearly shown that the amplitude generated from the overlying basalt columns in the 3D model has a higher value compared to the lower competent formation beneath. Using the same theory as applied in the airborne LiDAR, this technology allows for recording different object echoes. Figure 4 shows the acquisition of the photographs (Fig. 4a), RGB point cloud (Fig. 4b) and the visualization of the four echoes registered by the Riegl VZ4000 laser scanner (Riegl 2014) for a geological outcrop located along the “Sea to Sky Highway” (Fig. 4c). This facility is important for filtering the point cloud based on the different arrivals (first, last or single) and obtaining more information where there is vegetation or objects located along the LiDAR line of sight.

Full waveform LS survey of a road cut along the Sea to Sky Highway, BC, Canada. a RGB coloured slope model. b Wave amplitude coloured slope model

LS survey. a RGB photograph. b RGB point cloud. c Different registered echoes from natural targets
3.1.3 Ground-based mobile laser scanning
Mobile LS refers to the use of LS from moving platforms. The common utilization of this technique is through the use of wheeled vehicles (the instrument is usually mounted on the vehicle roof) for road or scene mapping purposes. However, mobile laser scanning systems are not restricted to wheeled vehicles as they can be mounted on any moving platforms, such as trains and boats. The main advantage of this technique is the speed with which it is possible to survey entire streets or buildings. Moreover, in case of coastlines, the use of a boat can allow scanning of cliff faces from the sea. Since the LS data are acquired from a moving platform, georeferencing the data can be more complicated. For this reason, when using this type of platform LS instruments are supplemented by GPS and an inertial measurement unit (IMU).
The use of mobile LS in engineering geology and especially in the study of landslides has been presented by Michoud et al. (2015) who describe an interesting case study in High Normandy, France. They tested boat-based LS capabilities by scanning 3D point clouds of unstable coastal cliffs showing the potential use of boat-based LS to detect rockfalls and erosional deposits including multi-temporal acquisitions, to monitor large slope changes.
New-generation LS is very flexible and can be also hand-held or used on platforms such as backpacks, thereby providing the ability to map areas while walking geological traverses.
Hand-held and backpack LS has to date not been widely used in the study of rock slopes but has seen a wide range of general applications including heritage site mapping, crime scene investigations and civil engineering projects. In engineering geology, the most important application to date is related to underground tunnel surveys (Eyre et al. 2016). Hand-held LS has the advantage of being very rapid and easy to use but currently results in less precision and resolution than traditional LS. It has limited range, making it ideal for tunnelling applications, but less applicable to slope and landslide analysis that requires greater distance.
3.2 Airborne platforms
Airplane, satellite, aerostatic balloon, helicopter and UAV are the most common airborne platforms currently available. Due to the high spatial resolution achievable with the new digital aerial photo-cameras and LS devices, airplane and satellite data can be used in the photo-interpretation of geotechnical projects at a large scale. However, despite the high quality of photographs and point clouds, the point of observation at the nadir is sub-optimal in the study of natural and artificial rock slopes characterized by very steep or even vertical slope sections. This problem can be overcome using platforms that allow change in the point of observation such as an aerostatic balloon, helicopter or UAV. This also significantly reduces most of the occlusion problems highlighted for the ground-based platforms.
3.2.1 Airborne digital photogrammetry using aerial or satellite imagery
Aerial photogrammetry refers to imaging acquired through aerial or satellite platforms. In airplane and satellite photogrammetry, the camera is usually pointed vertically towards the ground. Multiple overlapping photographs of the ground are taken as the aircraft/satellite flies along a flight path. These photographs are processed either using a stereo-plotter or in automated processing for digital elevation model and orthophoto creation. These techniques are therefore used in numerous types of cartographic application, from military and regional small-scale maps, to that of medium- and large-scale technical maps (topographic, geological, geomorphological, land use, etc.). Airplane/satellite photogrammetry is very useful in regional engineering geological mapping and for detecting landslide-related geomorphic landforms (Wolter et al. 2016; Mantovani et al. 2016; Clayton et al. 2017; Donati et al. 2017).
3.2.2 Airborne digital photogrammetry using an aerostatic balloon
Of the platforms presented, the use of the aerostatic balloon has been far less common in engineering geology. DP with an aerostatic balloon can be carried with one single camera (Take et al. 2007) or stereo-pairs (Firpo et al. 2011; Francioni et al. 2014). Firpo et al. (2011) and Francioni et al. (2014) showed the use of an aerostatic helium-filled balloon carrying an apparatus that consists of an aluminium bar with two camera slots for the study of high steep quarry slopes in Carrara (Italy) (Fig. 5a–c). The geometry and length of the apparatus can vary depending on the baseline that is used, and more camera slots for a video camera may be added to capture in real time the slope face during image acquisition (Fig. 5b, c) (Firpo et al. 2011; Francioni et al. 2014). Four electrical winches are used to drive the balloon (Fig. 5d), while image acquisition is controlled by a PC-driven radio system which guarantees synchronous data acquisition (Firpo et al. 2011; Francioni et al. 2014). In this way, stereo-pairs can be acquired simultaneously and used to build a scaled photogrammetric model using the image strip (the baseline being perfectly known by using the frame) or independent convergent models. Francioni et al. (2014) described the use of an aerostatic balloon in a complex slope in the Apuan Alps showing the possible use of this technique and highlighting some of the complex procedures involved. Balloon used to date for photogrammetric purposes can reach up to 300 m from the ground (Firpo et al. 2011; Francioni et al. 2014). However, the area to be imaged must be accessible and sufficiently wide (Francioni et al. 2014). Weather conditions can also be a major limitation in the use of this method, which is best conducted in the absence of rain and, especially, wind.

3.2.3 Airborne digital photogrammetry using a helicopter
The aerostatic balloon can be used only if appropriate site and weather conditions persist and a suitable inexpensive source of helium gas is available. When these conditions are not present or in the case of slopes higher than 300 m, this technique cannot be utilized. In such cases, helicopters can provide an ideal data acquisition platform. The photogrammetric equipment described in Salvini et al. (2011) and Salvini et al. (2013) consist of an aluminium or steel frame adapted to fit a helicopter landing skid supporting two digital cameras and two GPS antennas at its extremities. The equipment is connected and controlled in real time from operators in the helicopter. In this way, it is also possible to use differential GPS (the power source being located in the helicopter) which helps to know the position of the camera and the orientation of the frame at the moment of the image acquisition. In this case, stereo-pairs are also acquired simultaneously and used to build a scaled photogrammetric model through image strip or independent convergent models. Occlusions can be considerably reduced with a careful work plan as it is possible to check the photograph acquisition in real time from the helicopter. Figure 6 shows the photogrammetric equipment developed by Salvini et al. (2013) and utilized in the analysis of a rock slope sited in Northern Italy.

Equipment used for digital terrestrial photogrammetry with a helicopter. a Steel frame adapted to fit a helicopter landing skid. b Digital camera and GPS antennas. c GPS data receivers and laptop for real-time photograph visualization
Recent research has seen an increasing use of hand-held cameras in helicopter platforms to obtain high-quality SfM models (Gauthier et al. 2015). Digital SLR cameras now contain in-built GPS or conveniently mounted GPS adaptors. The use of hand-held cameras in the helicopter is well demonstrated by Vallet et al. (2000), Copons and Vilaplana (2008), Gauthier et al. (2015).
Helicopter platforms for DP have two main limitations, the first being the high costs involved and the second the difficulty in maintaining the stability and direction of the aircraft throughout the photogrammetric survey. Subsequently, this can create problems for the orientation of the photographs. However, with the acquisition of a considerable number of images, use of topographic survey to define the coordinates of ground control points and SfM software, this problem can be mitigated.
3.2.4 Airborne digital photogrammetry using an UAV
UAV systems are now routinely used in a wide variety of engineering and geoscience fields and include both fixed wing and multi-rotor options. UAV systems are highly flexible and provide an ideal platform for the acquisition of high-resolution photographic images along pre-programmed flight lines/paths. They overcome most of the limitations noted for the other platform providing increased spatial close-range coverage of inaccessible rock slope outcrops with reduced occlusions. Basically, the use of a UAV allows acquisition of areas that could not be surveyed with any other vehicle or methodology. Moreover, remote control of the UAV reduces the need for hire of a helicopter and operators, the cost of which may be significant. This makes the UAV method less expensive than the aerostatic balloon or helicopter.
Although UAV-based photography is the most common and inexpensive technique used at present, UAVs are increasingly being used to capture thermal, hyperspectral and light detection and ranging (LiDAR) imagery. An on-board GPS-IMU system provides the positions of the UAV camera at the moment of image acquisition, and independent convergent SfM methods are used to build the photogrammetric model. Figure 7 shows a Falcon 8 UAV (Fig. 7a) used during the survey of the Lorano open pit in the Carrara marble district, Italy (Fig. 7b) (Francioni et al. 2015).

UAV survey (after Francioni et al. 2015). a Falcon 8 UAV with gyro-stabilized digital camera Sony NEX-5 N. b Drone during the flight
The use of the UAV in the earth sciences and engineering geology is well documented in the recent literature (Haarbrink and Eisenbeiss 2008; Niethammer et al. 2010; Francioni et al. 2015; Salvini et al. 2015a; Assali et al. 2016; Westin 2017; Donati et al. 2017). The most important disadvantages in using the UAV technique is that it can be used only in the absence of wind/rain. This can present a major problem where local wind eddies exist along high mountain slopes. In case of multi-rotor options, it can also be difficult to acquire photographs maintaining the same line of sight (Francioni et al. 2015) and this can generate misalignment of photographs and major potential errors during their orientation. Obtaining a large number of photographs and using SfM software can, however, reduce these errors and make the UAV technique easier and more attractive. An additional current limitation in the use of the UAV that especially affects multi-rotor systems is the often limited battery life which can require the UAV pilot be within close range of the take-off/landing area. Where spatially extensive slopes require surveying, multiple battery packs may be essential. The advent of inexpensive UAV systems represents the most interesting and promising innovation regarding remote sensing techniques as it provides a very powerful and flexible instrument for the acquisition of photographs (Colomina and Molina 2014; Francioni et al. 2015; Westin 2017; Donati et al. 2017). Their use will, most likely, become more frequent in the coming years, and it is important to continue studies on their utilization in the field of engineering geology, particularly with respect to change detection/slope monitoring and multi-sensor capabilities. A potential future disadvantage in the use of UAV technology is the increasing flight restrictions in their use due to abuse of the technology from recreational use. In some countries, it may become increasingly difficult to obtain approval for UAV flights.
3.2.5 Airborne LiDAR
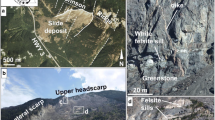
Airborne LiDAR devices emit up to 150,000 pulses per second, and a sensor measures the amount of time it takes for each pulse to bounce back (or return). An IMU integrated with a differential kinematic GPS provides information about the position and attitude of the sensor. Airborne LiDAR offers advantages compared to traditional measurement systems such as the ability to penetrate vegetation cover (first–last pulse mode), the possibility to record data at night and over a large survey area. Aerial LiDAR is widely utilized in engineering geology for landslide hazard mapping and modelling, change detection, cliff erosion and rockfall run out (Jaboyedoff et al. 2012; Lato et al. 2016; Piacentini et al. 2015). The use of this technique to detect geomorphic and major structural features for identifying palaeo-landslides has been recently shown by Clague et al. (2015) and Francioni et al. (2017). Figure 8 provides an example of airborne LiDAR and GIS for highlighting landslide-related geomorphic features at Mount Burnaby, British Columbia, Canada.

a 3D view of Mount Burnaby and Simon Fraser University, situated at the top of the mountain. View to the southeast. b 3D representations of LiDAR aspect maps with highlighted slump blocks on the north face of Mount Burnaby (after Francioni et al. 2017). View to the southeast
Recently, as a result of the full waveform systems, aerial LiDAR is also being utilized for the characterization of surface material from the analysis of the physical backscattering measurements (Sumnall et al. 2016).
3.2.6 Airborne LiDAR using an UAV
With advent of UAV solutions, small LS devices have been installed with the possibility to scan any type of slope surface. This type of LS acquisition presents the same advantages and limitations discussed in Sect. 3.2.4 for DP with UAV. However, it should be noted that accuracy, precision and resolution of this technique are poorer than that obtained using ground-based systems. This type of platform offers much more flexibility and overcomes limitations related to occlusion and point of observation. The use of UAV LS in engineering geology is not well documented to date but is an area of significant potential future research.
4 Remote sensing and rock slope stability analyses
A remarkable quantity of data can be obtained through the use of terrestrial remote sensing techniques. This information can be used for different types of slope analyses, varying from simple kinematic admissibility tests, to more complex numerical simulations.
4.1 Remote sensing and conventional methods of slope analysis
Conventional methods of slope analysis can include kinematic analysis, limit equilibrium calculations and run out analysis (Stead et al. 2006).
Kinematic analysis investigates the likelihood that unfavourably oriented discontinuities will generate discontinuity-controlled instability such as planar, wedge or toppling slope failures. The kinematic test considers the relative slope and discontinuity orientations and the effective friction angle along the discontinuity surfaces to determine whether a block can potentially move or not. This type of analysis can be carried out using a stereonet and/or 2D/3D vector analysis applied to 2D/3D rock structure models. Although a very simple analysis, it is a very useful preliminary tool allowing for a first estimation of potential failure and identification of potential key blocks. Stead et al. (2006), Brideau et al. (2011) and Francioni et al. (2015) noted that results of this analysis are influenced to a large degree by reliability of the discontinuity survey and the accuracy of the slope topography. Recent developments in available commercial software allow for including all the measured discontinuities in the rock slope analysis (instead of just considering the mean joint set orientations obtained from joint surveys at the slope toe). This makes the use of remote sensing techniques highly relevant because the data from remote sensing are representative of the entire slope from the toe to the crest. Figure 9 highlights this concept showing a comparison of two kinematic analyses that were performed with engineering geological (Fig. 9a) and remote sensing data (Fig. 9b) in the Lorano open pit (Carrara, Italy) (Francioni et al. 2015). The results clearly show the difference in the two data sets in relation to the different spatial areas covered by the two surveys. The conventional engineering geological survey was performed only in accessible areas, while the remotely sensed data from DP covered the entire slope. Figure 10 shows a photograph of the Lorano open pit (Fig. 10a) and the 3D model obtained using UAV and SfM techniques (Fig. 10b).

Kinematic slope stability analysis performed using a engineering geological data (93 measurements) and b remote sensing data (537 measurements) in the Lorano open pit (Carrara, Italy)

Lorano open pit. a Photograph of the open pit buttress and b SfM 3D model
Recent developments in kinematic software allow highly interactive kinematic stability analysis of slopes with semi-probabilistic methods of failure modes. The assigning of discontinuity attributes (roughness, persistence, infill, spacing, etc.) is also supported. Kinematic analysis of a slope should always consider the measured spatial location of major structures as determined using remote sensing; this practice, combined with the use of structural domains, avoids the identification of “fictitious” failure modes indicated on a stereonet but not observed in the slope face. It is emphasized that wherever possible remote sensing methods should be supplemented with field mapping and the use of photographic site observations. Oppikofer (2009), Brideau et al. (2011) and Francioni et al. (2015) showed that remote sensing and kinematic analysis can be usefully integrated with Geographic Information Systems (GIS) for developing thematic maps. These thematic maps can clearly illustrate how the results of a kinematic slope failure analysis can change with location in the slope, depending on the topographic detail recorded/available. Jaboyedoff et al. (2004), using the same approach, developed a code designed to integrate structural data into the digital surface model.
Limit equilibrium methods are routinely used to identify the slope hazard due to translational and rotational movements occurring along a distinct failure surface(s). These analyses consider force and/or moment equilibrium conditions and can be performed by stereonet, or preferably 2D/3D rock structure models. They may also be used to provide a preliminary assessment of rock slope toppling failure. Analyses are carried out to calculate either a factor of safety (FoS) or, through back analysis, a range of shear strength parameters at failure. The results of this type of calculation are based on the geometry of slope (or potential unstable block, depending on the scale of work), material properties, forces involved (water pressure, seismic forces, external forces) and discontinuity mechanical properties. In this context, the use of remote sensing techniques plays an important role in the definition of the discrete location of the discontinuities that form the failure surface(s) and rear release (tension crack) of unstable blocks (a necessary assumption in the limit equilibrium methods), the shape of the potentially unstable block and therefore the true potential failure volume (Salvini et al. 2011, 2013). Figure 11 shows an example of this method applied to a rock slope located in Northern Italy along the Domodossola–Iselle railway (after Salvini et al. 2011). Using a photogrammetric survey carried out with a helicopter (Fig. 11a), detailed photographs of the rock slopes were acquired (Fig. 11b) allowing definition of the geometry of blocks and discontinuities (Fig. 11c). This information was used to calculate the deterministic FoS using limit equilibrium software (Fig. 11d).

DP used for limit equilibrium analysis. a Photogrammetric survey with a helicopter. b Example of detailed photographs acquired during the survey. c Geometry of block and joints gained from DP. d Calculation of block FoS using DP data
The volume of blocks, together with the location (in term of coordinates) of each potential unstable block can also be used for rockfall simulation. Rockfall analysis is based on the study of the slope geometry and the characteristics of potential falling blocks. It is possible to determine the kinetic energy, velocity, “bounce height”, end points and lateral dispersion of potential falling blocks for the entire slope. Having a good representation of the slope morphology, potential unstable block geometry and land cover are crucial for this type of simulation. Figure 12 shows an example of combined use of remote DP and rockfall run out simulation in the Grotta delle Felci Cliff (Capri Island, Italy). The location (Fig. 12a) and geometry (Fig. 12c) of rock blocks were determined from a helicopter-based photogrammetric survey and the data used for an improved understanding of the lateral dispersion of the potentially unstable blocks (Fig. 12b) in addition to their kinetic energy, velocity and “bounce height” (Fig. 12d). This approach can be very important in planning protection work (either active or passive), or proposing monitoring systems (Salvini et al. 2011, 2013). Rockfall modelling represents a very powerful tool for the study of risk mitigation, especially where rock slopes are located above infrastructure such as roads, train tracks and working areas. Moreover, multi-temporal survey (e.g. with DP, LS, LiDAR and radar interferometry) can be used for defining debris volume and for change detection (spatial and temporal) analyses (Rosser et al. 2007; Blasone et al. 2014); thermal images and/or LS data can be used to locate seepage that can be included in both conventional or more sophisticated analyses (Vivas et al. 2013; Gigli et al. 2014).

Use of DP data for defining the rockfall run out simulations. a Location of potential unstable blocks. b Lateral dispersion of blocks in case of failure. c Example of block geometry reconstruction using the stereoscopy and the 3D modelling. d 2D Simulation of block fall with possible calculation of kinetic energy, velocity and “bounce height”
4.2 Remote sensing and more sophisticated numerical methods of slope analysis
Although limit equilibrium methods are the simplest and most widely used slope analysis technique, their use should, in general, be limited to uncomplicated case studies. More sophisticated numerical methods are better suited for the study of slopes of more complex slope geometry and structural geology. Similarly, material anisotropy, nonlinear behaviour, in situ stress, groundwater and brittle fracture can all influence the slope stability and often can only be realistically considered using sophisticated numerical simulations. These techniques of analysis, usually called numerical modelling analyses, can benefit significantly from remote sensing data, especially where 3D variations in the slope geometry and structure are important in the slope behaviour. Currently, the most widely used 3D numerical codes for slope stability analysis are continuum (finite difference and finite element) and discontinuum (distinct element) codes. Havaej et al. (2015) described the application of a recently introduced 3D lattice spring code that utilizes a lattice-based structure, consisting of point masses (nodes) connected by springs. The lattice spring model simulates rock fracture through the breakage of springs in shear and tension and once the spring fails in either tension (normal spring) or shear (shear spring), the tensile strength and cohesion reduce to zero (Havaej et al. 2015).
The advantages of the combined use of remote sensing and 3D distinct element methods (DEM) in rock slope investigations have been recently described by Francioni et al. (2014) and Spreafico et al. (2016). Figure 13 shows an analysis undertaken using two models (with different spatial resolution) of the same slope using a DEM. The principal objective of the study by Francioni et al. (2014) was to highlight the advantages and limitations of using terrestrial remote sensing data in a 3D DEM. The first model was obtained from a topographic map (Fig. 13a–c), and the second model from terrestrial LS (Fig. 13d–f). These simulations demonstrated that the values of strength reduction factor (SRF) obtained from the stability analysis can be significantly influenced by the measured geometry of the slope (Francioni et al. 2014).

3D rock slope models obtained from DP (after Francioni et al. 2014). a Initial model from topographic map, b 3D distinct element model based on topographic map, c 2D section, d initial model from terrestrial laser scanning, e 3D distinct element model based on terrestrial laser scanning and f 2D section. Colours represent the distinct elements (blocks) generated by interaction between different joint sets and the topography
The use of remote sensing data and the 3D finite difference method (FDM) was illustrated by Francioni et al. (2015) in order to understand the stress-induced damage in surface-mined areas. Simulations were done using the slope geometry derived from DP and LS. In this case, it was possible to increase the understanding of stress-induced damage in the Lorano open pit (Carrara, Italy) due to the excavation processes (Fig. 14a, b). The detailed information on the structural geological setting of the entire slope obtained from DP and LS was also used in DEM analysis. Measured data from a conventional engineering geological survey (e.g. scan line or window) can often only be used in discontinuum modelling of simple rock slopes assuming continuous or persistent joint sets. The data determined from remote sensing techniques, however, can allow for more sophisticated deterministic (using only joints visible on the DP/LS model) or stochastic discrete fracture network, DFN, analyses (Elmo 2006; Hamdi et al. 2015; Tuckey et al. 2013). Figure 15 shows the differences between the DEM models created using continuous joint sets (Fig. 15a, b) and a DFN (Fig. 15c, d).

3D rock slope models obtained from DP and LS (after Francioni et al. 2015). a Initial model and topography pre- and post-excavation. b Stress analysis

3D rock slope models obtained from DP and LS. a Initial 3DEC model. b 3DEC model using continuous persistent joint sets. c 3DEC model using a deterministic approach. d 3DEC model using a stochastic DFN approach
It must be emphasized, however, that the time needed for data processing are significantly longer when dealing with accurate and detailed slope geometry and that such detailed data are useful in complex cases but may be unnecessary in simple slopes where a large-scale topographic map can still be suitable (Francioni et al. 2014). Havaej et al. (2016) clearly showed the advantages of using terrestrial photogrammetry and LIDAR in developing DFN for a slate quarry slope at Delabole, Cornwall, UK. Detailed data were used to investigate the influence of different stochastic generated DFN on simulated slope failure mechanisms, the results agreeing with observed slope behaviour.
Havaej et al. (2015) showed the use of ground-based photogrammetric and airborne LiDAR data in the analysis of the Vajont slide, Italy, using a lattice spring approach. The landslide model was built using the airborne LiDAR data, while the sliding surface, discontinuity orientations and locations were derived from combined field analysis and long-range terrestrial photogrammetry. The use of this 3D-brittle fracture software, together with airborne and terrestrial remote sensing data, allowed the authors to improve the understanding of the importance of kinematics, internal damage and groundwater levels on the failure of the 1963 Vajont slide.
Wang et al. (2003) and Lorig et al. (2009) showed the use of particle flow codes for the analysis of rock slopes. Although this method showed good results for 2D simulations, its use in 3D modelling remains computationally expensive. Eberhardt et al. (2004) used hybrids methods, using a finite element mesh to represent the intact joint bounded blocks and discrete elements to simulate joint behaviour to explain the failure mechanism of the Randa rock slide (Switzerland), and Styles et al. (2011) applied it to the back analysis of the Joss Bay Chalk Cliff (UK). Vyazmensky et al. (2010) and Styles et al. (2011a, b) incorporated discrete fracture networks into hybrid numerical models to realistically simulate rock slope deformation in the Palabora, South Africa, and Bingham Canyon, USA, open pits, respectively.
As previously mentioned, apart from slope geometry information DP and LS can also be used for defining discontinuity roughness angles and joint roughness coefficient (Haneberg 2007; Kim et al. 2015, 2016). Höfle et al. (2009), Kurz et al. (2012) and Park et al. (2016) recently showed how it is possible to use LS intensity signal and hyperspectral imagery to locate seepage and rock weathering/alteration zones. Moreover, rock mass heterogeneities can also be remotely detected to develop ubiquitous joint rock mass models (Sainsbury et al. 2016).
5 Final remarks and discussion
In this paper, we show how remote sensing data can be successfully used to define the morphology and structural setting of both natural and engineered slopes, the shape and volume of potential unstable blocks and the geometry of the potential failure surfaces.
The selection of a specific survey technique for a given site remains a complex and challenging problem which requires knowledge of the terrain, the objective of the project, the availability of funding and technologies approved for use in the region (Lato et al. 2015). For this reason, it is important to recognize that the methods described should wherever possible be considered as complementing each other rather than being competitive.
In this context, Tables 1 and 2 summarize, respectively, the DP and LS platforms currently available; highlighting their advantages and limitations. Airplane and satellite-generated data are not included in these tables because as previously mentioned, due the nadir point of observation they are not optimal for deterministic study of natural and engineered rock slopes. Figure 16 provides a comparison of the DP remote sensing platforms discussed in this paper in relation to their cost, simplicity of use and ability to avoid occlusions.

Comparison between DP platforms
It has been shown how the information gained using these remote sensing techniques can be usefully applied within different types of conventional and numerical analyses and can play a key role in the final results of the model simulations. Figure 17 presents additional information that can be retrieved with LS and DP and the improvements in terms of input parameters that these techniques can offer conventional and numerical analyses of slopes.

Improvement that geomatic techniques can offer in conventional and numerical slope analyses
It should be noted that, wherever possible, integrated use of different remote sensing with conventional mapping and monitoring investigation techniques is recommended as this allows for the validation of the data and an understanding of the advantages and limitations of the proposed methodology.
The integration of slope monitoring systems with conventional and numerical analyses is a crucial aspect in the study of landslides. This is highlighted by new research on slope monitoring using remote sensing techniques that have been recently proposed by Sharma et al. (2016), Travelletti et al. (2016), Salvini et al. (2015b) and Kromer et al. (2015a, b). The results obtained from this research will improve the understanding of landslide behaviour.
6 Conclusions
This research presents international examples of the application of remote sensing techniques in the study of rock slopes and landslides and highlights the importance of incorporating the data gained from these techniques in subsequent stability analyses. We demonstrate the use of the different methods of remote sensing surveys and illustrate how each data set can be important in improving the precision and reliability of rock slope analyses.
With regard to DP, considerations of cost and flexibility often make the use of the hand-held camera or tripod the most convenient and effective photogrammetric solution. UAV systems are, however, increasingly seen as the preferred option as they are the least expensive aerial option and also provide the maximum ability to avoid occlusions.
With regard to LS, their use is simple and the results are very precise and reliable (especially in the case of full waveform LS). The cost of the equipment is the main limitation of these techniques especially when compared to DP. Occlusions can still be a problem when dealing with very high slopes and ground-based platforms. UAV LS systems can overcome this problem, but accuracy, precision and resolution of data decrease considerably when compared to ground-based platforms.
All the described remote sensing survey techniques can provide data sets suitable for incorporation into the varied methods of slope stability analysis. These data can overcome many limitations related to input parameters and the difficulties in reducing model and parameter uncertainty. Multiple methods of numerical analysis can be performed with remote sensing-derived data, and stochastic methods can be used to perform multiple simulations in order to better calibrate model results.
In kinematic analysis, the use of remote sensing techniques can result in more representative structural geological assessment of rock slopes; with continuing development in kinematic and block theory approaches, remote sensing data will be more efficiently utilized in slope design and remediation.
In limit equilibrium analysis, the use of specific block and discontinuity geometry directly available from DP and/or LS will lead to more reliable slope analyses as a result of decreased uncertainty related to the block volume and discontinuity inclination. Moreover, the block volume, location and shape together with data concerning the slope geometry and land cover will also allow more detailed and realistic rockfall run out simulations and the construction of more reliable hazard and risk maps.
Remote sensing data when incorporated into more sophisticated numerical models provide improved slope geometry input and also the possibility to include deterministic and/or stochastic representation of discontinuities (especially relevant to future improvements in the 3D analysis of complex slopes). This allows improved analyses and increased scope for model calibration. However, the use of complex geometry increases the simulation time significantly and it is important to understand when this approach is necessary and when it can and should be avoided.
References
Afana A, Williams JG, Hardy RJ, Rosser NJ, Hunter G, Davis J (2013) Integrating full-waveform terrestrial laser scanning into automated slope monitoring. Poster presented at XV International ISM Congress 2013, 16–20 September, Aachen, Germany
Assali P, Fivel A, Pollet N, Viguier F (2016) UAV systems for linear inspection. In: 3th international symposium rock slope stability, Lyon 2016, pp 119–120
Barbarella M, Fiani M, Lugli A (2015) Landslide monitoring using multitemporal terrestrial laser scanning for ground displacement analysis. Geomat Nat Hazards Risk 6:398–418
Beraldin JA (2004) Integration of laser scanning and close-range photogrammetry—the last decade and beyond. In: Proceedings: XXth international society for photogrammetry and remote sensing (ISPRS) Congress, Istanbul, Turkey, pp 972–983
Besl P, McKay N (1992) A method for registration of 3-D shapes. Inst Electr Electr Eng IEEE Trans Pattern Anal Mach Intel 14(2):239–256
Birch JS (2006) Using 3DM analyst mine mapping suite for rock face characterization. In: Kottenstette J, Tonon F (eds) Laser and photogrammetric methods for rock face characterization. ARMA, Alexandria, pp 13–32
Blasone G, Cavalli M, Cazorzi F (2014) Debris-flow monitoring and geomorphic change detection combining laser scanning and fast photogrammetric surveys in the Moscardo catchment (Eastern Italian Alps). Eng Geol Soc Territ 3:51–54
Bonilla-Sierra V, Scholtès L, Donzé FV, Elmouttie MK (2015) Rock slope stability analysis using photogrammetric data and DFN–DEM modelling. Acta Geotech 10:497–511
Brideau MA, Stead D (2010) Controls on block toppling using a three-dimensional distinct element approach. Rock Mech Rock Eng 43:241–260
Brideau MA, Pedrazzini A, Stead D, Froese C, Jaboyedoff M, van Zeyl D (2011) Three-dimensional slope stability analysis of South Peak, Crowsnest Pass, Alberta, Canada. Landslide 8:139–158
Clague JJ, Stead D, Francioni M, Westin A (2015) Geology of mount burnaby. Kinder Morgan, Calgary, p 13
Clayton A, Stead D, Kinakin D, Wolter A (2017) Engineering geomorphological interpretation of the Mitchell Creek Landslide, British Columbia, Canada. Landslides (in press)
Coggan JS, Wetherelt A, Gwynn XP, Flynn Z (2007) Comparison of hand-mapping with remote data capture systems for effective rock mass characterisation. In: 11th congress of international society for rock mechanics, Lisbon 2007, 9th–13th Jul 2007, Proceedings of 11th congress of the international society for rock mechanics–the second half century of rock mechanics, 1, pp 201–205
Colomina I, Molina P (2014) Unmanned aerial systems for photogrammetry and remote sensing: a review. ISPRS J Photogr Remote Sens 92:79–97
Copons R, Vilaplana JM (2008) Rock fall susceptibility zoning at a large scale: from geomorphological inventory to preliminary land use planning. Eng Geol 102(3–4):142–151
Donati D, Stead D, Ghirotti M, Brideau M-A (2017) A model-oriented, remote sensing approach for the derivation of numerical modelling input data: insights from the Hope Slide, Canada. In: Proceeding of the ISRM international symposium ‘rock mechanics for Africa’ AfriRock conference 2017, Cape Town, SAIMM
Eberhardt E, Stead D, Coggan JS (2004) Numerical analysis of initiation and progressive failure in natural rock slopes—the 1991 Randa rockslide. Int J Rock Mech Min Sci 41(1):69–87
Elmo D (2006) Evaluation of a hybrid FEM/DEM approach for determination of rock mass strength using a combination of discontinuity mapping and fracture mechanics modelling, with particular emphasis on modelling of jointed pillars. Ph.D. thesis. Camborne School of Mines, University of Exeter, Exeter
Eyre M, Wetherelt A, Coggan J (2016) Evaluation of automated underground mapping solutions for mining and civil engineering applications. J Appl Remote Sens 10(4):046011. https://doi.org/10.1117/1.JRS.10.046011
Firpo G, Salvini R, Francioni M, Ranjith PG (2011) Use of digital terrestrial photogrammetry in rocky slope stability analysis by distinct element numerical methods. Int J Rock Mech Min Sci 48(7):1045–1054
Francioni M, Girgenti C, Vanneschi C (2013) Underground quarrying industry and terrestrial laser scanning. Rendiconti Online Societa Geologica Italiana. 24:140–142
Francioni M, Salvini R, Stead D, Litrico S (2014) A case study integrating remote sensing and distinct element analysis to quarry slope stability assessment in the Monte Altissimo area, Italy. Eng Geol 183:290–302
Francioni M, Salvini R, Stead D, Giovannini R, Riccucci S, Vanneschi C, Gullì D (2015) An integrated remote sensing-GIS approach for the analysis of an open pit in the Carrara marble district, Italy: slope stability assessment through kinematic and numerical methods. Comput Geotech 67:46–63
Francioni M, Stead D, Clague JJ, Westin A (2017) Identification and analysis of large paleo-landslides at Mount Burnaby, British Columbia. Environ Eng Geosci. https://doi.org/10.2113/EEG-1955
Fröhlich C, Mettenleiter M (2004) Terrestrial laser scanning—new perspectives in 3D surveying. In: Thies M, Koch B, Spiecker H, Weinacker H (eds) Laser-scanners for forest and landscape assessment. International archives of photogrammetry, remote sensing and spatial information sciences, vol XXXVI-8/W2, pp 7–13
Gauthier D, Hutchinson J, Lato M, Edwards T, Bunce C, Wood D (2015) On the precision, accuracy, and utility of oblique aerial photogrammetry (OAP) for rock slope monitoring and assessment. In: 68th Canadian geotechnical conference, GeoQuebec, September 20–23, 2015
Ghirotti M, Genevois R (2007) A complex rock slope failure investigated by means of numerical modelling based on laser scanner technique. In: Proceedings: 1st Canada-US rock mechanics symposium. May 27–31, Vancouver, pp 917–924
GigaPan 2016. GigaPan Systems. http://www.gigapan.com/
Gigli G, Frodella W, Garfagnoli F, Morelli S, Mugnai F, Menna F, Casagli N (2014) 3-D geomechanical rock mass characterization for the evaluation of rockslide susceptibility scenarios. Landslides 11:131–140
Haarbrink RB, Eisenbeiss H (2008) Accurate DSM production from unmanned helicopter systems. Int Arch Photogr Remote Sens Spat Inf Sci. 37:159–164
Hamdi P, Stead D, Elmo D (2015) Characterizing the influence of stress-induced microcracks on the laboratory strength and fracture development in brittle rocks using a finite/discrete element method-micro discrete fracture network FDEM-µDFN approach. J Rock Mech Geotech Eng 7:509–625
Haneberg WC (2007) Directional roughness profiles from three-dimensional photogrammetric or laser scanner point clouds. In: Eberhardt E, Stead D, Morrison T (eds) Proceedings 1st Canada-US rock mechanics symposium. Vancouver, May 27–31, 2007, pp 101–106
Haneberg WC, Norrish NI, Findley DP (2006) Digital outcrop characterization for 3-D structural mapping and rock slope design along Interstate 90 near Snoqualmie Pass, Washington. In: Proceedings 57th annual highway geology symposium, Breckenridge, Colorado, September 27–29, 2006. pp 1–14
Havaej M, Wolter A, Stead D (2015) The possible role of brittle rock fracture in the 1963 Vajont Slide, Italy. Int J Rock Mech Min 78:319–330
Havaej M, Coggan J, Stead D, Elmo D (2016) A combined remote sensing–numerical modelling approach to the stability analysis of Delabole Slate Quarry, Cornwall, UK. Rock Mech Rock Eng 49(4):1227–1245
Höfle B, Vetter M, Pfeifer N, Mandlburger G, Stötter J (2009) Water surface mapping from airborne laser scanning using signal intensity and elevation data. Earth Surf Proc Land 34(12):1635–1649
Jaboyedoff M, Baillifard F, Couture R, Locat J, Locat P (2004) Toward preliminary hazard assessment using DEM topographic analysis and simple mechanic modeling. In: Lacerda WA, Ehrlich M, Fontoura AB, Sayo A (eds) Proceedings of the 9th international symposium on landslides. Balkema, Rotterdam, pp 191–197
Jaboyedoff M, Oppikofer T, Abellan A, Derron ME, Loye A, Metzger R, Pedrazzini A (2012) Use of LIDAR in landslide investigations: a review. Nat Hazards 61:5–28
Kim DH, Poropat GV, Gratchev I, Balasubramaniam A (2015) Improvement of photogrammetric JRC data distributions based on parabolic error models. Int J Rock Mech Min Sci 80:19–30
Kim DH, Gratchev I, Hein M, Balasubramaniam A (2016) The application of normal stress reduction function in tilt tests for different block shapes. Rock Mech Rock Eng 49(8):3041–3054
Kromer RA, Abellán A, Hutchinson DJ, Lato M, Edwards T, Jaboyedoff M (2015a) A 4D filtering and calibration technique for small-scale point cloud change detection with a terrestrial laser scanner. Remote Sens 7:13029–13052
Kromer RA, Hutchinson DJ, Lato MJ, Gauthier D, Edwards T (2015b) Identifying rock slope failure precursors using LiDAR for transportation corridor hazard management. Eng Geol 195:93–103
Kurz TH, Buckley SJ, Howell JA (2012) Close range hyperspectral imaging integrated with terrestrial LiDAR scanning applied to rock characterisation at centimetre scale. In: International archives of the photogrammetry, remote sensing and spatial information sciences, vol XXXIX-B5, 2012, XXII ISPRS Congress, 25 August–01 September 2012, Melbourne, Australia
Lato M, Diederichs MS, Hutchinson DJ, Harrap R (2009) Optimization of LiDAR scanning and processing for automated structural evaluation of discontinuities in rock masses. Int J Rock Mech Min Sci 46:194–199
Lato MJ, Gauthier D, Hutchinson DJ (2015) Rock slopes asset management: selecting the optimal three-dimensional remote sensing technology. Transp Res Rec 2510:7–14
Lato M, Porter M, Hensold G, McDougall S, Kromer R, Gaib S (2016) Understanding landslide movement and kinematics with airborne Lidar. In: Proceedings of the Canadian, geotechnical conference, geovancouver 2016
Lorig L, Stacey P, Read J (2009) Slope design methods. In: Read J, Stacey P (eds) Guidelines for open pit slope design. CSIRO Publishing, Collingwood, pp 237–264
Lucieer A, Jong SM, Turner D (2014) Mapping landslide displacements using structure from motion (SfM) and image correlation of multi-temporal UAV photography. Prog Phys Geogr 38(1):97–116
Mantovani M, Devoto S, Piacentini D, Prampolini M, Soldati M, Pasuto A (2016) Advanced SAR interferometric analysis to support geomorphological interpretation of slow-moving coastal landslides (Malta, Mediterranean Sea). Remote Sens 8(6):443
Michoud C, Carrea D, Costa S, Derron MH, Jaboyedoff M, Delacourt C, Maquaire O, Letortu P, Davidson R (2015) Landslide detection and monitoring capability of boat-based mobile laser scanning along Dieppe coastal cliffs, Normandy. Landslides 12(2):403–418
Niethammer U, Rothmund S, James MR, Travelletti J, Joswig M (2010) UAV-based remote sensing of landslides. Int Arch Photogr Remote Sens Spat Inf Sci 38:5
Oppikofer T (2009) Detection, analysis and monitoring of slope movements by high-resolution digital elevation models. PhD thesis, Institute of Geomatics and Analysis of Risk, University of Lausanne, Lausanne, Switzerland
Park J, Bates M, Jeong YS, Kim KM, Kemeny J (2016) Creating a digital outcrop model by using hyper-spectrometry and terrestrial LiDAR. In: 50th U.S. rock mechanics/geomechanics symposium. 26–29 June, Houston, Texas. ARMA-2016-507
Piacentini D, Devoto S, Mantovani M, Pasuto A, Prampolini M, Soldati M (2015) Landslide susceptibility modeling assisted by Persistent Scatterers Interferometry (PSI): an example from the northwestern coast of Malta. Nat Hazards 78:681–697
Riegl, 2014. http://www.riegl.com/
Rosser N, Lim M, Petley D, Dunning S, Allison R (2007) Patterns of precursory rockfall prior to slope failure. J Geophys Res: Earth Surf 112(4):F04014
Sainsbury DP, Sainsbury BL, Sweeney E (2016) Three-dimensional analysis of complex anisotropic slope instability at MMG’s Century Mine. Min Technol 125(4):212–225
Salvini R, Francioni M (2013) Geomatics for slope stability and rock fall runout analysis: a case study along the Alta Tambura road in the Apuan Alps (Tuscany, Italy). Ital J Eng Geol 5:481–492
Salvini R, Francioni M, Fantozzi PL, Riccucci S, Bonciani F, Mancini S (2011) Stability analysis of “Grotta delle Felci” Cliff (Capri Island, Italy): structural, engineering–geological, photogrammetric surveys and laser scanning. Bull Eng Geol Environ. 70:549–557
Salvini R, Francioni M, Riccucci S, Bonciani F, Callegari I (2013) Photogrammetry and laser scanning for analyzing slope stability and rock fall runout along the Domodossola-Iselle railway, the Italian Alps. Geomorphology 185:110–122
Salvini R, Riccucci S, Gullì D, Giovannini R, Vanneschi C, Francioni M (2015a) Geological application of UAV photogrammetry and terrestrial laser scanning in marble quarrying (Apuan Alps, Italy). Eng Geol Soc Territ 5:979–983
Salvini R, Vanneschi C, Riccucci S, Francioni M, Gullì D (2015b) Application of an integrated geotechnical and topographic monitoring system in the Lorano marble quarry (Apuan Alps, Italy). Geomorphology 241:209–223
Sharma J, Francioni M, Busler J, Stead D, Donati D, Onsel E, Clague J, Brideau M-A (2016) Monitoring landslides in pipeline corridors using a combined satellite-based InSAR and geomechanical modelling approach. GeoVancouver 2016. In: The 69th Canadian geotechnical conference
Spreafico MC, Francioni M, Cervi F, Stead D, Bitelli G, Ghirotti M, Girelli VA, Lucente CC, Tini MA, Borgatti L (2016) Back analysis of the 2014 San Leo landslide using combined terrestrial laser scanning and 3D distinct element modelling. Rock Mech Rock Eng 49:2235–2251
Spreafico MC, Cervi F, Francioni M, Stead D, Borgatti L (2017) An investigation into the development of toppling at the edge of fractured rock plateaux using a numerical modelling approach. Geomorphology 288:83–98
Stead D, Coggan J (2012) Numerical modelling of rock slope stability. In: Clague J, Stead D (eds) Landslide: types, mechanisms and modelling. Cambridge University Press, Cambridge, pp 144–158
Stead D, Wolter A (2015) A critical review of rock slope failure mechanisms: the importance of structural geology. J Struct Geol 74:1–23
Stead D, Eberhardt E, Coggan JS (2006) Developments in the characterization of complex rock slope deformation and failure using numerical modelling techniques. Eng Geol 83:217–235
Sturzenegger M, Stead D (2009a) (a). Close-range terrestrial digital photogrammetry and terrestrial laser scanning for discontinuity characterization on rock cuts. Eng Geol 106:163–182
Sturzenegger M, Stead D (2009b) Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat Hazards Earth Syst Sci 9(2):267–287
Styles T, Coggan JS, Pine RJ (2011a) Back analysis of the Joss Bay Chalk Cliff Failure using numerical modelling. Eng Geol 120(1):81–90
Styles T, Rabus B, Bloom J (2011) Integrated numerical modelling and InSAR monitoring of a slow moving slope instability at Bingham Canyon Mine. Slope Stability 2011, In: International symposium on rock slope stability in open pit mining and civil engineering, Vancouver, Canada
Sumnall MJ, Hill RA, Hinsley SA (2016) Comparison of small-footprint discrete return and full waveform airborne lidar data for estimating multiple forest variables. Remote Sens Environ 173:214–223
Take WA, Chappel MJ, Brachman RWI, Rowe RK (2007) Quantifying geomembrane wrinkles using aerial photography and digital image processing. Geosynth Int 14(4):219–227
Travelletti J, Philippossian F, Mayoraz R (2016) A cost-efficient approach to monitor rockfall activity over large areas using non-permanent single-camera system (mono-photogrammetry). In: 3th international symposium rock slope stability, Lyon 2016, pp 135–136
Tuckey Z, Stead D, Eberhardt E (2013) An integrated approach for understanding uncertainty of discontinuity persistence and intact rock bridges in large open pit slopes. In: Proceedings of the slope stability 2013. Brisbane, Sept 2013, 189–204
Vallet J, Skaloud J, Kölbl O, Merminod B (2000) Development of a helicopter based integrated system for avalanche and hazard management. Int Arch Photogr Remote Sens 33(B2):565–572
Vivas J, Tuckey Z, Stead D, Wolter A, Elmo D, D’Ambra S (2013) Seepage characterization in high rock slopes using remote sensing. In: Proceedings of the ARMA, San Francisco ARMA Paper No. 13–462
Vyazmensky A, Stead D, Elmo D, Moss A (2010) Numerical analysis of block caving-induced instability in large open pit slopes: a finite element/discrete element approach. Rock Mech Rock Eng 43(1):21–39
Wang C, Tannant D, Lilly PA (2003) Numerical analysis of the stability of heavily jointed rock slopes using PFC2D. Int J Rock Mech Min Sci 40(3):415–424
Westin AM (2017) Downie slide: an integrated remote sensing approach to characterization of a very slow moving landslide. MSc. Thesis, Simon Fraser University
Westoby MJ, Brasington J, Glasser NF, Hambrey MJ, Reynolds JM (2012) ‘Structure-from-motion’ photogrammetry: a low-cost, effective tool for geoscience applications. Geomorphology 179:300–314
Wolter A, Stead D, Ward BC, Clague JJ, Ghirotti M (2016) Engineering geomorphological characterisation of the Vajont Slide, Italy, and a new interpretation of the chronology and evolution of the landslide. Landslides 5:1067–1081
Acknowledgements
The authors wish to thank Ms. Megan Dewit and Ms. Allison Westin (Simon Fraser University, BC, Canada) for their support during the remote sensing survey along the See to Sky Highway (BC, Canada). We are extremely grateful to Dr. Silvia Riccucci for her assistance during the photogrammetric surveys in the Carrara marble district and Northern Italy. Moreover, we would like to express our gratitude to the reviewers who provided important and constructive suggestions for improving the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Francioni, M., Salvini, R., Stead, D. et al. Improvements in the integration of remote sensing and rock slope modelling. Nat Hazards 90, 975–1004 (2018). https://doi.org/10.1007/s11069-017-3116-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-017-3116-8