
Abstract
Hydrodynamic lubrication of rectangular micro-textures on sliding contact surfaces is investigated using numerical calculation methods. The theoretical models for the slider surface are developed and the film pressure is used to evaluate the hydrodynamic lubrication based on the Reynolds equation. Meanwhile, the geometry and distribution of the rectangular dimples are optimized for maximizing the average film pressure. Results show that the film pressure is dependent on the geometry and distribution of the rectangular micro-dimples. The optimal geometry of the single rectangular dimple is obtained, and the spacing has an important influence on the film pressure. The distribution types of rectangular dimples affect the hydrodynamic lubrication significantly and the interlaced array of the rectangular micro-dimples is beneficial to enhancing the hydrodynamic lubrication. Meanwhile, the rectangular dimples with 72° interlaced angle exhibits the best effectivity.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Surface textures have proven to be an effective way to enhance the friction and lubrication performances of contact surfaces for many years, and they are used in many mechanical components including bearings [1], piston rings [2], mechanical seals [3], cutting tools [4], gears [5] and cylinder liners [6]. The main functions of the micro-textures are summarized as: capturing wear debris to avoid severe surface damages [7], reducing the actual contact area to decrease the friction coefficient [8], acting as reservoirs to supply micro-lubrication [9] and generating hydrodynamic lubrication to increase the load carrying capacity [10]. Among above functions, the certain improvement of additional hydrodynamic lubrication is regarded as the most dominant mechanism for wide applications of surface textures, which has attracted considerable attention for many years.
Fundamental researches on hydrodynamic lubrication of surface textures have been conducted with experimental and numerical methods [11,12,13,14]. Various results show that the dispersed and closed dimples are beneficial to generating hydrodynamic effect compared to the continuous grooves [15, 16], and the geometry of textures has a profound influence on the hydrodynamic lubrication [11, 17]. For examples, Wang et al. [18] evaluated the hydrodynamic effect of micro-dimples using sliding friction experiments, and it was found that an optimum geometry and distribution of cylinder micro-dimples exists where the load carrying capacity was increased at least twice due to the increasing hydrodynamic pressure. Costa and Hutchings [19] investigated the influence of micro-texture topography (circle, groove and chevron) with various geometries on lubricant film thickness under hydrodynamic lubrication conditions. Experimental results showed that the textures geometrical shapes affected the film thickness and hydrodynamic pressure. Besides, lots of theorical and numerical studies about the hydrodynamic lubrication of textures showed that the texture depth, area ratio, shape, inner structure and location influence the hydrodynamic lubrication and load capacity by evaluating the film pressure [20,21,22,23]. The hydrodynamic pressure generated between textured surfaces was attributed to the convergent wedge-shaped gaps formed by the surface textures [20]; meanwhile, researchers found that the pressure was dependent on the variation of convergence ratio, which was strongly influenced by the geometry of textures [24]. Therefore, the optimization of textures is necessary and important for improving the hydrodynamic effect.
The dimple and groove textures are commonly used in investigations [25, 26], and the rectangular micro-dimple, as a typical shape, is investigated and utilized for reducing friction and increasing the load carrying capacity [27,28,29]. The advantages of rectangular micro-dimples demonstrate potential benefits in improving the hydrodynamic lubrication due to the film pressure generation [30], secondary lubrication [31] and micro-bearing lubrication [20]. Considerable experimental investigations about the rectangular dimples on lubrication and friction were performed, results showed that the rectangular textures had the lower average friction coefficient than circular textures reported by Zhang et al. [32] and the square dimples with a width of 5 µm exhibited lower friction compared to the groove textures under lubricated conditions [26]. Furthermore, Grewal et al. [33] experimentally compared three rectangular micro-textures with different lengths, widths and aspect ratios for enhancing the wettability and friction performance; unfortunately, the geometry of rectangular micro-textures was limited with several parameters. Lu et al. [34] revealed that the square-shaped dimples worked as lubricant reservoirs lowered the friction by secondary lubrication regimes using experimental methods, and the performance depended on the geometry of textures. While the experimental works are time-consuming and limited. Dobrica et al. [35] used numerical analyses to optimize square-textured surface with regard to different plane-inclined sliders and dimple aspects for improving the hydrodynamic lubrication. Further, Papadopoulos et al. [29] used CFD simulations to exhibit that the proper square dimples can improve the load-carrying capacity by increasing the film thickness and film pressure on fluid dynamic lubrication. Considering the inner structures of surface textures, the bottom shape of rectangular micro-textures was studied for stronger film thickness and lubrication enhancement [20]; however, the geometry of rectangular micro-textures was not optimized.
Based on above reviewed literature, it well illustrates that the rectangular micro-textures can improve the lubrication and friction performances due to the increasing hydrodynamic effect, and the geometry of textures has an important effect. However, few studies about the rectangular dimples with different geometries and distribution types are investigated systematically by theoretical analysis on hydrodynamic lubrication. Therefore, efforts are still needed to be continued for selecting the best choice of geometry and distribution of the rectangular dimples for enhancing the hydrodynamic lubrication.
In this paper, numerical analyses are adopted for investigating the effect of rectangular dimples on hydrodynamic lubrication based on the Reynolds equation, and the average film pressure is calculated and regarded as the evaluation criteria for hydrodynamic lubrication. Meanwhile, special attention is focused on the influence of geometry of single rectangular dimple, spacing in array and distribution type of the rectangular dimples. An optimization of the implementation of rectangular textures is performed and the optimal results can provide a guidance for experimental design in order to enhance lubrication and minimize friction.
2 Theoretical analysis
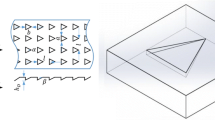
Figure 1 shows the schematic diagram of the sliders with rectangular dimples. The sliding model consisted of two parallel sliders separated with an oil film thickness of h0 is shown in Fig. 1a. The lower sample is fixed with evenly distributed rectangular dimples, and the upper sample with the smooth surface is sliding with a relative sliding velocity v. The texture geometry and distribution are shown in Fig. 1b, as can be seen that the rectangular dimples with an x-width a, y-width b and depth d are distributed with the x-spacing (horizontal direction) sx, y-spacing (vertical direction) sy and array angle φ. Meanwhile, each rectangular dimple is in an imaginary rectangular cell with an x-width la and y-width lb, and the widths of whole distribution zone in x and y directions are lx and ly, respectively. The numeral calculations and theoretical models are developed based on the imaginary rectangular cell as a basic unit. Then, the area ratio of single rectangular dimple ε can be expressed as:

Schematic diagram of the sliders with rectangular dimples
Assuming that the uniform and incompressible lubricants are Newtonian fluid with a constant film thickness, and only the dynamic pressure effect formed by the pressure of the lubricating film is considered. Under these circumstances, the general Reynolds equation can be written as follows [36]:
where h is the local film thickness, p is the local film pressure, and η is the dynamic viscosity of the fluid. Besides, x and y are Cartesian coordinates paralleled and perpendicular to the sliding direction, respectively.
Further, for analyzing the influence of geometry of single rectangular dimple, spacing paralleled to the sliding direction (sx), spacing perpendicular to the sliding direction (sy) and the distribution type on hydrodynamic pressure, the values of local film thickness h are divided into four cases:
Case 1: single rectangular dimple
Case 2: x-direction spacing
Case 3: y-direction spacing
Case 4: surface distribution with different array angles
The pressure at the textured surface edges can be approximated as ambient pressure pa, and the textures can be seen a periodical change in y direction that perpendicular to the sliding direction [37]. Thus, pressure distribution of textures is periodical in y direction with a period length of lb. Meanwhile, to reduce the influence of boundary and ensure the consistency of film pressure of each dimple as far as possible, the pressure gradient with respect to the direction normal to the boundary is kept equal. Therefore, the boundary conditions can be written as:
From Eq. (8), it can be seen that the boundary condition can be written as: \( \frac{\partial p}{\partial y}(x,y = 0) = \frac{\partial p}{\partial y}(x,y = l_{b} ) \) with k = 0 for a single dimple (case 1) or the x-spacing distribution (case 2) [38]; for the y-spacing and different array angle distributions (cases 3 and 4), the texture distributions are composed by a series of single row (in x direction) along y direction [21], and for each row (in x direction), the boundary condition can be written with different k. Thus, it is sufficient to consider a periodical boundary condition in y direction, and the single row can be seen the special case.
Meanwhile, considering the cavitation phenomenon will be occurred in the divergent region, Jakobsson–Floberg–Olsson cavitation theory is used as complementary condition in the cavitation zone. The p − θ model presented by Elord is used and which satisfies the mass conservation automatically [39]. Meanwhile, combined with the Elrod algorithm, the partial differential equation with the optimization of a switch function “g” is valid both in full film and cavitation zones [39, 40]. The equation is written as follows:
where β is the lubricant bulk modulus, which is defined as:
θ is the fraction film content, defined as:
where ρ is the lubricant density and ρc is the lubricant density in cavitation zone.g is the switch function defined as:
The film pressure can be calculated as below:
In order to facilitate calculation, dimensionless processing is conducted, and the dimensionless parameters are defined as follows:
where wa is the reference value of the dimple width, ha is the reference value of the dimple depth, P is the dimensionless film pressure, H is the dimensionless film thickness and D is the dimensionless dimple depth. Additional, X and Y represent the dimensionless Cartesian coordinate system.
Based on above processes, the dimensionless Reynolds equation is given as:
Accordingly, the dimensionless film thickness for the four cases can be expressed as follows:
Case 1: single rectangular dimple
Case 2: x-direction spacing
Case 3: y-direction spacing
Case 4: surface distribution with different array angles
The dimensionless film pressure P can be written as the flows:
where Pc = pc/pa is the dimensionless cavitation pressure and \( \bar{\beta } = {\beta \mathord{\left/ {\vphantom {\beta \rho }} \right. \kern-0pt} \rho }_{a} \) is the dimensionless lubricant bulk modulus.
The differential equation shown in Eq. (15) is solved by the numerical calculation of the Gauss–Seidel iteration method [41, 42], where the computational domain is meshed with a dense grid with m nodes in x direction and n nodes in y direction, and the interval between two adjacent nodes for all computational domain in x-direction is lx/m and that in y-direction is ly/n; meanwhile, to ensure the same calculation accuracy, the same interval value of 0.2 in x direction and y direction is selected considering the computational efficiency and accuracy. Then the dimensionless pressure value P(i, j) at the point (i, j) is acquired based on the values of surrounding four points of P(i − 1, j), P(i + 1, j), P(i, j − 1) and P(i, j + 1), as shown in Eq. (21).
For obtaining and converging the value of P(i, j) quickly, Eq. (22) is adopted:
where s is the number of iterations and w is the relaxation factor of 1.2. The specific iterative processes refer to [43]. The converging condition is shown as Eq. (23).
where Er represents the error tolerance.
The dimensionless average pressure Pave in the computational domain is chosen as an indicator to evaluate the load carrying capacity of the dimpled surface and the Pave can be calculated by Eq. (24).
Based on above theoretical analyses, the effect of geometric parameters and distribution type of the rectangular dimples on the average dimensionless pressure is investigated, and the calculation is performed according to the conditions that in Table 1.
3 Results and discussion
3.1 Single rectangular dimple
The effect of the geometry of single rectangular dimple on dimensionless pressure is investigated using the response surface method (RSM) with an L15 array model. Three factors of x-width, y-width, depth of the rectangular dimples and five levels for each factor are selected, and that are shown in Table 2. The dimensionless average pressure is used as the response, and the response surface model established the relationship between the factors and response is built for optimizing the geometry of single rectangular dimple.
3.1.1 Calculated results
The typical morphologies (three-dimensional and two-dimensional) and profiles of the dimensionless pressure distribution and film thickness of the rectangular dimple with x-width of 28 µm, y-width of 82 µm and depth of 40 µm are shown in Fig. 2. As can be seen from Fig. 2a and c that the dimensionless pressure and film thickness are large inside the micro-dimple, and the dimensionless film pressure increases gradually up to a maximum and then reduces sharply. The maximum dimensionless pressure is obtained at the outlet that the fluid shifts to the rectangular dimple (Fig. 2b). It can be explained that the micro-dimple provides the similar effect of the stepped slider and the fluid outlet of micro-dimple forms a convergent contact which builds up the hydrodynamic pressure. The average value of the dimensionless film pressure in the whole surface (Fig. 2) is calculated using as output response and the results based on the L15 array are shown in Table 3.

Morphologies and profiles of the dimensionless pressure distribution and film thickness of the rectangular dimple (a = 28 µm, b = 82 µm, d = 12 µm). a Three-dimensional (3D) dimensionless pressure distribution; b two-dimensional (2D) dimensionless pressure distribution; c profiles of the dimensionless pressure and film thickness along the A–A
3.1.2 Mathematical models
The second-order polynomial response surface mathematical model is adopted to analyze the influence of the rectangular dimple geometry on the dimensionless average pressure, and the general model is expressed as:
where f is the corresponding response, α0, αi, αii, αij are the regression coefficient, xi and xj are the coded values of the ith and jth parameters, respectively, and ξ is the error.
The objective function for the response of the dimensionless average pressure (Pave) is built as follows:
where a, b and d represent the x-width, y-width and depth of the rectangular dimple, respectively.
In order to evaluate the adequacy and fitness of the developed model for the response of dimensionless average pressure, the analysis of variance (ANOVA) method is carried out, and the results of ANOVA are shown in Table 4. As can be seen that the model F-value of 11.03 implies the model is significant with a probability of 0.83%. Moreover, the pr-value less than 0.05 confirms that the developed model is significant with a confidence level of 95%. The “Adeq Precision” that measures the signal to noise ratio is 10.849, which is greater than 4, indicating an adequate signal [44]. Therefore, the model can be used to navigate the dimensionless average pressure.
Figure 3 shows the normal probability plot for the residuals. The plot illustrates that the residuals closely follow straight lines, indicating that the errors are in accordance with the normal distribution, thus adequately supports the fitted model. The relation between the actual and predicted dimensionless average film pressure is shown in Fig. 4. As can be seen that scatter of the data points lies near the fitted line, which indicates a good fitness of the predicted and actual values. The above results further prove the adequacy of the developed model.

Normal probability plot for the residuals

Relation between the actual and predicted dimensionless average film pressure
3.1.3 Influence of rectangular dimple geometry
Figure 5 shows the variations of dimensionless average pressure with different parameters. As shown in Fig. 5a, with a certain depth of 5 µm, the large dimensionless average pressure is obtained with the small x-width and y-width, and it reduces slightly with respect to the increasing x-width and y-width. Figure 5 b and c shows that the depth has a more profound influence on the Pave compared to the x-width and y-width. It is also noted that (Fig. 5b), the Pave decreases firstly and then increases slightly with the increasing depth ranging from 2 to 50 µm, and the largest value of Pave is obtained with the small depth of 2 µm and x-width of 10 µm. Meanwhile, it can be observed that the Pave decreases with the increasing x-width in the case of a relatively small depth (e.g. 2 µm) and that increases with the increasing x-width in the case of a relatively large depth (e.g. 50 µm). The results indicate that the Pave is influenced strongly by a combination of x-width and depth. Figure 5c demonstrates that the Pave decreases significantly with the increasing depth and that has a minor relationship with the y-width. The results can be explained from Eq. (2), the dynamic pressure effect is reflected by the formula of \( 6v\eta \frac{\partial h}{\partial x} \), which is strongly affected by the film thickness h and x direction that paralleled to lubricant flow direction. Meanwhile, the film thickness h and x direction are dependent on texture depth and x-width, thus, the film pressure presents a higher correlation with texture depth and x-width than that of texture y-width.

Variations of dimensionless average pressure with different parameters
3.1.4 Optimal single rectangular dimple
Based on above analyses of RSM, the objective optimization is performed with a purpose of achieving a large dimensionless average pressure, and the optimized parameters of x-width, y-width and depth are 10 µm, 45 µm and 2 µm with a confidence of 95%, respectively. The morphologies and profiles of the film thickness and pressure distribution of the optimal rectangular dimple are shown in Fig. 6. As shown that the film thickness is high inside the texture reflected by the cubic shape of the rectangular dimple. The film pressure increases from the inlet of the rectangular dimple towards to the outlet along the direction of sliding speed and then decreases, and the profile of the section A–A (Fig. 6d) exhibits that the maximum value of film pressure occurs near the outlet of the dimple. The solution for this result is similar to the “step effect” [36, 45]: when the clearance between two sliders has a step change, an additional hydrodynamic pressure can be generated due to the restriction in fluid flow direction cause by the dimple sidewall and reduced clearance. Further, the predicted average film pressure is 1.7353 × 105 Pa that is close to the calculated value of 1.6973 × 105 Pa. Therefore, the predicted error less than 10% can be accepted due to the inherent inaccuracy.

Morphologies and profiles of the film thickness and film pressure distribution of the optimal rectangular dimple. a 3D film thickness; b 3D film pressure distribution; c 2D film pressure distribution; d profiles of the film thickness and film pressure along A–A
To further verify the optimization results, the average film pressure of rectangular textures is compared with the square textures with the same area ratio, the results are shown in Fig. 7. It is noted that the average film pressure of optimized rectangular textures is slightly higher compared to the square textures with the area ratio of 25% and 11%, which reveals that the optimized rectangular textures have a greater potential in enhancing the hydrodynamic lubrication.

Comparison of average film pressure of optimized rectangular textures and square textures
3.1.5 Area ratio of single rectangular dimple
To investigate the influence of area ratio of single rectangular dimple on the hydrodynamic lubrication based on the Eq. (1), the average film pressure with different ratios of dimple width to cell width (a/la and b/lb) is calculated and shown in Fig. 8. As seen from Fig. 8a, the average film pressure increases firstly and then reduces with the increasing ratio of a/la, which indicates that the increasing area ratio of the single rectangular dimple (induced by the increasing a/la) along lubricant flow direction significantly affects the hydrodynamic lubrication, and the area ratio of 15–25% (with a/la of 0.3–0.5) generates the relatively large average film pressure. The result is closed to the area ratio of 0.3 reported by Adjemout et al. [46] and Shen and Khonsari [47]. It also indicated that the film pressure is strongly influenced by the end boundaries of the computational domain in the fluid flow direction, thus, the interaction influenced by end boundaries cannot be neglected and the spacing need to be studied. Figure 8b exhibits that the average film pressure increases with the increasing ratio of b/lb, the results reveal that the increasing area ratio of the single rectangular dimple in y-width direction can enhance the hydrodynamic lubrication.

Variations of average film pressure with different ratios of dimple width to cell width. a dimple x-width to cell x-width a/la (a = 10 µm, b = 45 µm, lb = 90 µm); b dimple y-width to cell y-width b/lb (a = 10 µm, b = 45 µm, la = 20 µm)
In order to further analyze the interaction of the rectangular dimples, the effect of the horizontal and vertical spacing with 5 rows or 5 columns on the film pressure is investigated, and x-spacing sx ranging from 2 to 60 µm and y-spacing sy ranging from 2 to 60 µm for the rectangular dimple (a = 10 µm, b = 45 µm, d = 2 µm) are selected.
3.2 X-direction spacing
Figure 9 shows the morphologies and profiles of the film pressure distribution and film thickness of rectangular dimples with the x-spacing of 10 and 40 µm. As exhibited, with the x-spacing of 10 µm, the significant interaction between the adjacent dimples is occurred shown in zone A (Fig. 9a) compared with the x-spacing of 40 µm in zone B (Fig. 9d). The profiles of the film pressure distribution and film thickness in Fig. 9c along the section A–A exhibit a significant difference compared to that in Fig. 9f along the section B–B. As seen in Fig. 9c that the film pressure increases monotonously with the higher film thickness from the inlet to the outlet of the rectangular dimples and then decreases linearly to the inlet of next dimple. The rising and falling curves seem to be symmetrical due to the equal width of a and sx. Figure 9d shows that with the x-spacing of 40 µm, the interaction of the adjacent micro-dimples is weakened. The profiles of the film pressure distribution and film thickness in Fig. 9f along the section B–B exhibit that the film pressure increases rapidly up to a maximum at the outlet of the rectangular dimples and then decreases slowly to the inlet of next dimple.

Morphologies and profiles of the film pressure distribution and film thickness of rectangular dimples (a = 10 µm, b = 45 µm, d = 2 µm) with sx of 10 and 40 µm. a 3D film thickness, sx = 10 µm; b 2D film pressure distribution, sx = 10 µm; c profiles of the film thickness and film pressure along A–A; d 3D film thickness, sx = 40 µm; e 2D film pressure distribution, sx = 40 µm; f profiles of the film thickness and film pressure along B–B
The average film pressure of the rectangular dimples with different x-spacing is calculated and that is shown in Fig. 10. As seen that the average film pressure is sensitive to the x-spacing. With the increasing x-spacing ranging from 2 to 60 µm, the average values of the film pressure increase and then continually reduce. The results are consistent with Refs. [45, 48], assuming that each dimple locates in an imaginary rectangular cell, the interaction between two dimples is reduced and even be neglected with the large distance in x-direction. The results exhibit that the optimal value of the x-spacing that maximizes the average film pressure is 10 µm.

Variations of the average film pressure with the different x-spacing sx (a = 10 µm, b = 45 µm, d = 2 µm)
3.3 Y-direction spacing
Figure 11 shows the morphologies and profiles of the film pressure distribution and film thickness of rectangular dimples with the y-direction spacing of 10 and 40 µm. It is noted that y-spacing has a significant influence on film pressure distribution. With the small y-spacing of 10 µm (Fig. 11a), there is a remarkable interaction between the adjacent rectangular dimples; and with the y-spacing of 40 µm (Fig. 11d), the film pressure distribution is relatively independent of each dimple. The profiles of film thickness and film pressure along A–A (Fig. 11c) exhibit that the film pressure distribution with the spacing of 10 µm is significantly influenced by the adjacent rectangular dimples compared to that along B–B (Fig. 11f), and then the value of the film pressure on the spacing surface between the dimples with the spacing of 10 µm is larger than that with the spacing of 40 µm, which ascribes to the weakened interaction of the adjacent rectangular dimples with the increasing y-spacing.

Morphologies and profiles of the film pressure distribution and film thickness of rectangular dimples (a = 10 µm, b = 45 µm, d = 2 µm) with sy of 10 and 40 µm. a 3D film pressure, sy = 10 µm; b 2D film pressure distribution, sy = 10 µm; c profiles of the film thickness and film pressure along A–A; d 3D film pressure, sy = 40 µm; e 2D film pressure distribution, sy = 40 µm; f profiles of the film thickness and film pressure along B–B
The average film pressure of rectangular dimples with different y-spacing based on the film pressure distribution (shown as in Fig. 11) is calculated to investigate the influence of y-spacing on the hydrodynamic lubrication, and the results are plotted in Fig. 12. It is observed that the average film pressure reduces with the increasing y-spacing ranging from 2 to 60 µm. The result indicates that the interaction and stepped slider effect induced by the adjacent dimples are weakened with the increasing y-spacing and reduced area density along the y-direction [45], which reduces the hydrodynamic effect; accordingly, the average film pressure is reduced. The results also demonstrate that the strong hydrodynamic lubrication with large average film pressure can be obtained with a small y-spacing as soon as possible.

Variations of the average film pressure with the different y-spacing sy (a = 10 µm, b = 45 µm, d = 2 µm)
3.4 Surface distribution with different array angles
The distribution type of the micro-textures on the surface has an important influence on the lubrication, friction and wear [49, 50]. Therefore, surface distribution types of uniform array and interlaced array with 72° of the rectangular dimples are shown in Fig. 13. It is noted that the interaction between the adjacent rectangular dimples in zone B of the interlaced array with 72° is stronger compared to that in zone A of the uniform array with 180°. The two-dimensional morphologies of the film pressure distribution in Fig. 13b and d shows that the film pressure distributes in uniform and interlaced modes, respectively. Meanwhile, the average film pressure of the textured surface with different array angles φ is calculated and shown in Fig. 14. As can be seen that the average film pressure decreases with the increasing array angle ranging from 72° to 180°. The results reveal that the distribution type with the interlaced arrays of the rectangular dimples is beneficial to enhancing the hydrodynamic lubrication by the increased interaction between the adjacent dimples along the fluid flow direction. The array angle of 72° (72° is the special case that the space surface center in the first row of rectangular dimples and the dimple center in the second row of rectangular dimples are on the same horizontal line) exhibits the largest average film pressure, this configuration provides a reference distribution type for promoting the hydrodynamic lubrication and load carrying capacity.

Three-dimensional and two-dimensional morphologies of the film pressure distribution of rectangular dimples with different distribution types. a and b uniform arrays with 180°; c and d interlaced arrays with 72° (a = 10 µm, b = 45 µm, d = 2 µm, sx = 10 µm, sy = 10 µm)

Variations of the average film pressure with the array angle (a = 10 µm, b = 45 µm, d = 2 µm, sx = 10 µm, sy = 10 µm)
3.5 Future research
From these considerable investigates, it is certain that the rectangular dimples have a significant influence on the dimensionless pressure, and the further optimization of rectangular dimples has potential for improving the hydrodynamic lubrication. Therefore, future research can be focused on the situation with randomly distributed dimples with stochastically different positions and shapes, and different film thicknesses and slope angles of two sliders; meanwhile, the experiments can be further studied based on the theoretical results.
4 Conclusions
In this paper, the influence of rectangular micro-textures on hydrodynamic lubrication is studied using numerical analysis. The geometrical parameters and distribution types of the rectangular dimples are optimized in terms of the maximum average film pressure for improving the hydrodynamic lubrication performance. The conclusions are as follows:
-
(1)
The geometry of the single rectangular dimple has an important influence on the dimensionless pressure. The maximum dimensionless pressure is obtained at the outlet that the fluid shifts to the rectangular dimples due to the divergent contact. The depth of the micro-dimples has a more evident effect compared to the x-width and y-width. The optimized values of x-width (10 µm), y-width (45 µm) and depth (2 µm) are selected for the single rectangular dimple. Meanwhile, the area ratio of single rectangular dimple significantly affects the hydrodynamic lubrication.
-
(2)
The x-spacing and y-spacing affect the film pressure distribution. The average film pressure increases firstly and then reduces with the increasing x-spacing, and that reduces monotonously with the increasing y-spacing.
-
(3)
The distribution of the rectangular dimples with an interlaced array exhibits a relatively large value of average film pressure compared to the uniform array, indicating that the interlaced array of the rectangular dimples is beneficial to enhancing the hydrodynamic lubrication. Meanwhile, the interlaced arrays of rectangular dimples with 72° exhibits the best effectivity.
Abbreviations
- h 0 :
-
Film thickness
- v :
-
Relative sliding velocity
- a :
-
X-width of single rectangular dimple
- b :
-
Y-width of single rectangular dimple
- d :
-
Depth of rectangular dimples
- φ :
-
Array angle
- l a :
-
X-width of an imaginary rectangular cell (horizontal direction)
- l b :
-
Y-width of an imaginary rectangular cell (vertical direction)
- s x :
-
X-spacing (horizontal direction)
- s y :
-
Y-spacing (vertical direction)
- l x :
-
Distributed width of textures in x direction (horizontal direction)
- l y :
-
Distributed width of textures in y direction (vertical direction)
- ε :
-
Area ratio of single rectangular dimple
- h :
-
Local film thickness
- p :
-
Local film pressure
- η :
-
Dynamic viscosity
- g :
-
Switch function
- θ :
-
Fraction film content
- ρ :
-
Lubricant density
- ρ c :
-
Lubricant density in cavitation zone
- p c :
-
Cavitation pressure
- β :
-
Lubricant bulk modulus
- x :
-
Cartesian coordinate paralleled to the sliding direction
- y :
-
Cartesian coordinate perpendicular to the sliding direction
- p ave :
-
Average film pressure
- w a :
-
Dimensionless reference value of dimple width
- h a :
-
Dimensionless reference value of dimple depth
- P :
-
Dimensionless local film pressure
- H :
-
Dimensionless local film thickness
- D :
-
Dimensionless dimple depth
- H 0 :
-
Dimensionless film thickness
- A :
-
Dimensionless x-width of single rectangular dimple
- B :
-
Dimensionless y-width of single rectangular dimple
- D :
-
Dimensionless depth of rectangular dimples
- L a :
-
Dimensionless x-width of an imaginary rectangular cell (horizontal direction)
- L b :
-
Dimensionless y-width of an imaginary rectangular cell (vertical direction)
- S x :
-
Dimensionless x-spacing (horizontal direction)
- S y :
-
Dimensionless y-spacing (vertical direction)
- L x :
-
Dimensionless distributed width of textures in x direction (horizontal direction)
- L y :
-
Dimensionless distributed width of textures in y direction (vertical direction)
- P c :
-
Dimensionless cavitation pressure
- \( \bar{\beta } \) :
-
Dimensionless lubricant bulk modulus
- X :
-
Dimensionless cartesian coordinate paralleled to the sliding direction
- Y :
-
Dimensionless cartesian coordinate perpendicular to the sliding direction
- s :
-
Number of iterations
- w :
-
Relaxation factor
- E r :
-
Error limit
- P ave :
-
Dimensionless average film pressure
- ξ :
-
Error in polynomial function
References
Wang LL, Guo SH, Wei YL, Yuan GT, Geng H (2019) Optimization research on the lubrication characteristics for friction pairs surface of journal bearings with micro texture. Meccanica 54:1135–1148
Etsion I, Sher E (2009) Improving fuel efficiency with laser surface textured piston rings. Tribol Int 42:542–547
Wang T, Huang WF, Liu XF, Li YJ, Wang YM (2014) Experimental study of two-phase mechanical face seals with laser surface texturing. Tribol Int 72:90–97
Xing YQ, Deng JX, Wang XS, Ehmann KF, Cao J (2016) Experimental assessment of laser textured cutting tools in dry cutting of aluminum alloys. J Manuf Sci Eng-Trans ASME 138(7):071006
Gupta N, Tandon N, Pandey RK (2018) An exploration of the performance behaviors of lubricated textured and conventional spur gearsets. Tribol Int 128:376–385
Hua XJ, Sun JG, Zhang PY, Ge HQ, Fu YH, Ji JH, Yin BF (2016) Research on discriminating partition laser surface micro-texturing technology of engine cylinder. Tribol Int 98:190–196
Xing YQ, Deng JX, Wu Z, Wu FF (2017) High friction and low wear properties of laser-textured ceramic surface under dry friction. Opt Laser Technol 93:24–32
Xing YQ, Wu Z, Yang JJ, Wang XS, Liu L (2020) LIPSS combined with ALD MoS2 nano-coatings for enhancing surface friction and hydrophobic performances. Surf Coat Technol 385:125396
Hu TC, Hu LT, Ding Q (2012) Effective solution for the tribological problems of Ti–6Al–4 V: combination of laser surface texturing and solid lubricant film. Surf Coat Technol 206:5060–5066
Etsion I (2005) State of the art in laser surface texturing. J Tribol Trans ASME 127:248–253
Kumar V, Sharma SC (2018) Influence of dimple geometry and micro-roughness orientation on performance of textured hybrid thrust pad bearing. Meccanica 53:3579–3606
Wang W, He YY, Zhao J, Mao JY, Hu YT, Luo JB (2020) Optimization of groove texture profile to improve hydrodynamic lubrication performance: theory and experiments. Friction 8(1):83–94
Gong JY, Jin Y, Liu ZL, Jiang H, Xiao MH (2019) Study on influencing factors of lubrication performance of water-lubricated micro-groove bearing. Tribol Int 129:390–397
Liu WL, Ni HJ, Wang P, Chen HL (2020) Investigation on the tribological performance of micro-dimples textured surface combined with longitudinal or transverse vibration under hydrodynamic lubrication. Int J Mech Sci 174:105474
Ibatan T, Uddin MS, Chowdhury MAK (2015) Recent development on surface texturing in enhancing tribological performance of bearing sliders. Surf Coat Technol 272:102–120
Nakano M, Korenaga A, Korenaga A, Miyake K, Murakami T, Ando Y, Usami H, Sasaki S (2007) Applying micro-texture to cast iron surfaces to reduce the friction coefficient under lubricated conditions. Tribol Lett 28:131–137
Gropper D, Wang L, Harvey TJ (2016) Hydrodynamic lubrication of textured surfaces: a review of modeling techniques and key findings. Tribol Int 94:509–529
Wang XL, Kato K, Adachi K, Aizawa K (2003) Loads carrying capacity map for the surface texture design of SiC thrust bearing sliding in water. Tribol Int 36:189–197
Costa HL, Hutchings IM (2007) Hydrodynamic lubrication of textured steel surfaces under reciprocating sliding conditions. Tribol Int 40:1227–1238
Nanbu T, Ren N, Yasuda Y, Zhu D, Wang Q (2018) Micro-Textures in concentrated conformal-contact lubrication: effects of texture bottom shape and surface relative motion. Tribol Lett 29:241–252
Ji JH, Guan CW, Fu YH (2018) Effect of micro-dimples on hydrodynamic lubrication of textured sinusoidal roughness surfaces. Chin J Mech Eng 31:67
Uddin MS, Ibatan T, Shankar S (2017) Influence of surface texture shape, geometry and orientation on hydrodynamic lubrication performance of plane-to-plane slider surfaces. Lubr Sci 29:153–181
Kango S, Singh D, Sharma RK (2012) Numerical investigation on the influence of surface texture on the performance of hydrodynamic journal bearing. Meccanica 47:469–482
Cupillard S, Glavatskih S, Cervantes MJ (2008) Pressure build up mechanism in a textured inlet of a hydrodynamic contact. J Tribol 130(2):97–107
Wang XY, Shi LP, Dai QW, Huang W, Wang XL (2018) Multi-objective optimization on dimple shapes for gas face seals. Tribol Int 123:216–223
Pettersson U, Jacobson S (2003) Influence of surface texture on boundary lubricated sliding contacts. Tribol Int 36:857–864
Mao B, Siddaiah A, Menezes PL, Liao YL (2018) Surface texturing by indirect laser shock surface patterning for manipulated friction coefficient. J Mater Process Technol 257:227–233
Zhang H, Hua M, Dong G-N, Zhang D-Y, Chin K-S (2016) A mixed lubrication model for studying tribological behaviors of surface texturing. Tribol Int 93:583–592
Papadopoulos CI, Kaiktsis L, Fillon M (2014) Computational fluid dynamics thermohydrodynamic analysis of three-dimensional sector-pad thrust bearings with rectangular dimples. J Tribol Trans ASME 136:011702
Han YX, Fu YH (2018) Investigation of surface texture influence on hydrodynamic performance of parallel slider bearing under transient condition. Meccanica 53:2053–2066
Liu WL, Ni HJ, Chen HL, Wang P (2019) Numerical simulation and experimental investigation on tribological performance of micro-dimples textured surface under hydrodynamic lubrication. Int J Mech Sci 163:105095
Zhang YL, Zhang XG, Wu TH, Xie YB (2016) Effects of surface texturing on the tribological behavior of piston rings under lubricated conditions. Ind Lubr Tribol 68(2):158–169
Grewal HS, Pendyala P, Shin H, Cho I-J, Yoon E-S (2017) Nanotribological behavior of bioinspired textured surfaces with directional characteristics. Wear 384:151–158
Lu P, Wood RJK, Gee MG, Wang L, Pfleging W (2016) The friction reducing effect of square-shaped surface textures under lubricated line-contacts-an experimental study. Lubricants 4:26
Dobrica MB, Fillon M, Pascovici MD, Cicone T (2010) Optimizing surface texture for hydrodynamic lubricated contacts using a mass-conserving numerical approach. Proc Inst Mech Eng 224:737–750
Etsion I (2013) Modeling of surface texturing in hydrodynamic lubrication. Friction 1(3):195–209
Ji JH, Fu YH, Bi QS (2014) Influence of geometric shapes on the hydrodynamic lubrication of a partially textured slider with micro-grooves. J Tribol Trans ASME 136:041702
Yu HW, Wang XL, Zhou F (2010) Geometric shape effects of surface texture on the generation of hydrodynamic pressure between conformal contacting surfaces. Tribol Lett 37:123–130
Elrod HG (1981) A cavitation algorithm. J Lubr Technol Trans ASME 103(3):350–354
Qiu Y, Khonsari MM (2009) On the prediction of cavitation in dimples using a mass-conservative algorithm. J Tribol Trans ASME 131:041702
Gerald CF, Wheately PO (1994) Applied numerical analysis, 5th edn. Addison-Wesley Publishing Co., New York
Scott LR (2011) Numerical analysis. Princeton University Press, New Jersey
Venner CH, Lubrecht AA (2000) Multigrid techniques: a fast and efficient method for the numerical simulation of elastohydrodynamically lubricated point contact problems. Proc Inst Mech Eng Part J J Eng Tribol 214:43–62
Montgomery DC (2000) Design and Analysis of Experiments, 5th edn. Wiley, New York
Fu H, Ji JH, Fu YH, Hua XJ (2018) Influence of donut-shaped bump on the hydrodynamic lubrication of textured parallel sliders. J Tribol-Trans ASME 140:041706
Adjemout M, Brunetiere N, Bouyer J (2016) Numerical analysis of the texture effect on the hydrodynamic performance of a mechanical seal. Surf Topogr Metrol Prop 4:014002
Shen C, Khonsari MM (2015) Numerical optimization of texture shape for parallel surfaces under unidirectional and bidirectional sliding. Tribol Int 82:1–11
Etsion I, Burstein L (1996) A model for mechanical seals with regular microsurface structure. Tribol Trans 39:677–683
Ren N, Nanbu T, Yasuda Y, Zhu D, Wang Q (2007) Micro textures in concentrated-conformal-contact lubrication: effect of distribution patterns. Tribol Lett 28:275–285
Zhang H, Liu Y, Hua M, Zhang D-Y, Qin L-G, Dong G-N (2018) An optimization research on the coverage of micro-textures arranged on bearing sliders. Tribol Int 128:231–239
Acknowledgements
This work is supported by the Natural Science Foundation of Jiangsu Province (BK20170676), China; National Natural Science Foundation of China (52075097, 51775105); the Technology Foundation for the Selected Returned Overseas Chinese Scholars in Nanjing (1102000219), China; and the Zhishan Young Scholar Foundation of Southeast University, China (2242020R40111), China. The authors would also like to thank the Advanced Manufacturing Processes Laboratory in Northwestern University (USA).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Xing, Y., Li, X., Hu, R. et al. Numerical analyses of rectangular micro-textures in hydrodynamic lubrication regime for sliding contacts. Meccanica 56, 365–382 (2021). https://doi.org/10.1007/s11012-020-01296-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-020-01296-x