
Abstract
In this study, thermomechanical behavior of a beam reinforced with Shape Memory Alloy (SMA) elements is investigated (an elastic core with upper and bottom SMA layers). The improved Brinson constitutive model is used in order to account for the asymmetric behavior of SMA in tension and compression. Assuming a plane stress model for the beam reinforced with SMA layers, a semi-analytical formulation is proposed. This formulation has two parts: the first part consists of a linear distribution of strain along the cross section and the second part is an iterative numerical procedure to satisfy classical equilibrium equations. For the numerical procedure, bisection method is used. Moreover, the semi-analytical results are compared with a 2D Finite Element (FE) solution. The proposed model is applicable for Euler–Bernoulli beams with any material and geometric features. For example, for a composite beam including both superelastic and shape memory SMA layers the proposed model can be employed. Regarding the results, there is more than 95% agreement between the present numerical solutions and those of 2D FE method. Also, for the numeric examples discussed in this paper, it is shown that considering the asymmetry between the tension and compression behavior of SMA, leads to at least 25% change in the force–displacement plot with respect to the cases when considering symmetric behavior and also, there is 8% (of the width of the structure) shift in the location of the neutral axis from the centerline. In addition, hysteresis inner loops are investigated, using the asymmetric proposed model and compared against 2D FE solution, where results show a good agreement between two solutions.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The growing use of smart materials, over the past decades, made researchers conduct numerous studies to improve the constitutive relations of these materials, particularly in Shape Memory Alloys (SMA). Although several three-dimensional models [1,2,3,4,5] are proposed for thermomechanical behavior of SMA’s, many applications of SMA devices can be considered to be 1D, which indeed are more simple. Therefore, researchers prefer to use one-dimensional (1D) models in engineering simulations. A distinct advantage of employing 1D models is that the material parameters can be easily identified through engineering experiments [6]. The proposed models have to be interfaced with analysis programs which are commonly used in engineering offices during the design process of a real device. Accordingly, a good constitutive model is a robust and flexible one; which at least is capable of predicting shape memory effect (SME), superelasticity (SE), and avoiding any complexity [7]. Another important feature of a constitutive model is the thermodynamical consistency that guarantees the dissipation is always not negative for all the processes that occur during phase transformation [8].
Damping an unwanted vibration is one of the most important applications of SMA embedded structures. Due to high energy absorption’ and sustaining large strains, these materials can damp a vibration without any energy source [9]. Additionally, these structures are being investigated for diverse applications; tuning of adaptive absorbers [10, 11], structural reinforcement in seismic engineering [12], controlling the shape of structures [13] and repairing damages [14].
The most known structural 1D models for SMA are developed by Tanaka, Liang and Rogers, and Brinson. Tanaka’s model was based on martensite phase transformation, which only predicts SE behavior and does not explain SME behavior in low-temperatures [15]. Liang and Rogers’s model was similar to that of Tanaka, except that, their model was developed based on definition of Helmholtz free energy, and instead of the Tanaka’s exponential transformation equations, the cosine transformation equations were proposed [16].
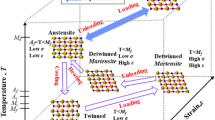
Another well-known 1D SMA model is Brinson’s model. Good agreement with experimental tests, ability to predict the material behavior in different temperatures, and simplicity of formulations made it very applicable. Despite these advantages, the original version of Brinson model (OBM) was incapable of predicting asymmetric response in tension, compression and internal loops due to incomplete phase transformation which are called secondary effects. Additionally, inadmissible prediction of the martensite fraction \((\xi > 1)\) [17] (for example MD2 zone in Fig. 1) was another important flaw in the OBM. Later researchers tried to eliminate these flaws and modify the model. Proposed algorithms by Refs. [18,19,20] was used to account for internal loops. Also, modifications on Brinson’s transformation functions were introduced in Refs. [17, 20,21,22]. In this paper, an improvement on the Brinson model proposed by Poorasadion et al. [23], for SMAs is employed to properly take into account the asymmetric response of SMA in tension and compression.

Phase diagram of an SMA for the constitutive model modifed in [23]
There are several studies on bending response of SMA beams. Baragetti [24] investigated the non-linear bending of wires which was a consequence of material and geometry features. Based on pure bending tests, Rejzner et al. [25] reported that the stress–strain behavior of SMA is asymmetric in tension–compression loading. Using Lagoudas 3D model, Mirzaeifar et al. [26] did a comparative study on a symmetric model based (J 2) and asymmetric model based (J 2 − J 1). Moreover, they studied the asymmetry effect on the location of neutral axis as well as the force–displacement diagram of a superelastic SMA beam. Furthermore, there are some studies on SMA beams, [27,28,29], all of which used models with linear behavior in all regions. SMA actuators have been embedded into a variety of host materials over the past 10 years and as a result, there have been several attempts to analyze SMA hybrid composite beams, including non-linear vibration analysis [30], thermal analysis [31,32,33], buckling analysis [34] and dynamic analysis [35,36,37]. Also, unique properties of SMAs makes it able to absorb much energy during an impact event and as a result it can increase the damage impact resistance of a composite part when they are embedded within the structure [38].
The main objective of this article is to present a semi-analytical study of a Euler–Bernoulli beam reinforced with SMA layers that could be used for investigation and analysis of a specific but frequently used structural typology. The main advantage of this research is to introduce a detailed and applicable structural model. The advantage of the improved Brinson’s model is consideration of non-linear transformation functions and also an asymmetric behavior in tension and compression of SMA. In the existing literature; to the knowledge of the authors, there is no simultaneous consideration of reinforcing with SMAs, non-linear transformation kinetics and asymmetry effect. The bending response of the beam at different temperatures was numerically implemented and simulated assuming both symmetric and asymmetric behaviors of SMA and then compared with each other.
This paper is organized as follows: First, the improved Brinson’s model (IBM) is briefly introduced. Then, a mathematical model for beam reinforced with SMA based on IBM and Euler–Bernoulli beam theory is developed. Also, a user-defined material subroutine (UMAT), [23], is used in the non-linear finite element software ABAQUS/Standard to simulate SMA’s behavior based on the 2D Euler–Bernoulli beam element and IBM. In the results section, as an illustration, the SME and SE of the reinforced beam with SMA layers are investigated and compared to those that ignore the asymmetry effect. Finally, the researchers present a summary and draw conclusions in the last section.
2 A brief review of the improved Brinson’s model
As mentioned before, the original version of Brinson’s 1D constitutive model, despite simplicity and plenty of applications, was not capable of capturing secondary effects. The asymmetric behavior of SMA’s in tension–compression and internal hysteresis loops due to incomplete phase transformation are examples of these secondary effects. Poorasadion et al. [23] suggested an improvement on the Brinson’s model. Their improvements were based on the experimental tests reported by Flor et al. [39] and Gall et al. [40], which proved the asymmetric behavior of SMA’s in tension and compression. To predict this asymmetric behavior, they decomposed the martensite fraction into three parts: a stress-induced martensite in tension, a stress-induced martensite in compression and a temperature-induced martensite. Martensite volume fraction, therefore, takes the following form:
All + and − superscripts in this section denote the tension and compression, respectively. Thus, the constitutive equation of the IBM takes a differential form as:
where D and Ω are the elastic modulus and thermoelastic coefficient, respectively, also Ω T and Ω S represent temperature-induced and stress-induced transformation coefficients, respectively. In Brinson’s [41] work it has been shown that the temperature-induced transformation coefficient must be zero (Ω T = 0).
Motivated by Brinson [41], the elastic modulus is a linear function of the martensite volume fraction. Considering different elastic moduli for austenite, detwinned martensite in tension, detwinned martensite in compression and twinned martensite, the elastic modulus is then proposed as the following equation:
where D a and \(D_{m}^{ + }\) are the elastic moduli for fully austenite and fully detwinned martensite under tension, respectively, while \(D_{m}^{ - }\) and D T are the elastic moduli for the fully detwinned martensite under compression and fully twinned martensite SMA, respectively.
The stress-induced transformation tensor for tension and compression is related to the elastic modulus and the maximum transformation strain directly as follows:
In addition, the material parameter Θ remains constant, because its value is extremely small compared to the elastic modulus. Knowing that (Ω T = 0) and dropping the subscript (s) in Ω s , for simplicity, the transformation tensor takes the following form as:
Substituting Eqs. (3) and (5) into Eq. (2) and integrating, and also considering a uniaxial tension loading and a uniaxial compression loading to find the unknown function of the integration, the constitutive equation for asymmetric behavior of SMA’s with nonconstant material parameters becomes:
In order to describe the transformation process, a phase diagram (Fig. 1) is utilized. Regarding Fig. 1, the parameters C A and C M are stress-temperature slopes in austenite and martensite phases, respectively. Moreover, [A] and [M T ] are transformation strips of austenite and twinned martensite phases, respectively, while [M D1], [M D2] and [M D3] are transformation strips of detwinned martensite phase. Also, A s and A f are austenite start and finish temperatures, and M s and M f are martensite start and finish temperatures, respectively. σ s and σ f are start and finish transformation stresses, respectively. The unit vectors \(n^{k} \left( {k = A,M_{T} ,M_{D1} ,M_{D2} ,M_{D3} } \right)\) are normal to the corresponding boundary transformation strips. \(X_{0}^{A}\) and \(X_{0}^{{M_{T} }}\) are the horizontal distances of transformation strips in austenite and twinned martensite phases, respectively, while the parameters \(X_{0}^{{M_{D1} }} ,X_{0}^{{M_{D2} }}\) and \(X_{0}^{{M_{D3} }}\) are presenting vertical distances of transformation strips in the detwinned martensite phase. At a new point, the parameters \(\xi ,\xi_{T} ,\xi_{S}^{ + } ,\xi_{S}^{ - }\) are equal to their initial value unless, firstly it is in one of the phase transformation zones (R K ), where (R K ) is the region including the new point, secondly the loading path \((\tau_{i} )\) and phase transformation path \((n^{k} )\) are in the same direction (Eq. 7). If these conditions are satisfied, the new values of these parameters are calculated from transformation kinetic functions \((f^{k} )\) introduced in where \((\tau_{i} )\) is the tangent vector to the loading path, on the phase diagram. In other words, in each zone of phase transformation, the transformation happens if the tangent vector of loading path \((\tau_{i} )\) and transformation path \((n^{k} )\) are in the same direction. For instance, on \(M_{D3}^{ + }\) zone in Fig. 1, the phase transformation happens only if the stress increases, neither in the case of temperature variation nor in the case of stress decreasing.
Table 1. These new values are functions of their initial values, their location in the phase diagram plane and also the loading path where the loading path is connecting initial point to the new point through an arbitrary line.
where \(\tau_{i}\) is the tangent vector to the loading path, on the phase diagram. In other words, in each zone of phase transformation, the transformation happens if the tangent vector of loading path (τ i ) and transformation path (n k) are in the same direction. For instance, on \(M_{D3}^{ + }\) zone in Fig. 1, the phase transformation happens only if the stress increases, neither in the case of temperature variation nor in the case of stress decreasing.
On closer inspection of Eq. (6), it could be noticed that D, Ω+, Ω− are all function of martensite volume fraction ξ and also martensite volume fraction itself is a function of stress and temperature. Thus, the relation to find strain associated with specific stress and temperature is direct. However, when the strain becomes the control variable, then an iterative procedure is used to find the compatible stress (or temperature). In the present study, in which strain and temperature are the inputs, bisection method, which is an iterative numerical method, is used to calculate the stress. It is noted that the solution algorithm for the IBM-based user-defined material subroutine has been presented in [23].
3 Reinforced beam model development
Assuming the classical Euler–Bernoulli theory, a semi-analytical model is developed for an SMA beam subjected to bending. Figure 2 depicts the schematic of the beam where each section is considered to be under pure bending. NA and CL are denoting the neutral axis and the centerline for the cross-section, respectively. Additionally, ρ and κ are the bending radius and the curvature of the beam, respectively. According to the classical Euler–Bernoulli theory, the normal strain, at each section along the beam length (x), is a linear function of the height along the cross section as follows:
where y is the instantaneous distance of the layer to the neutral axis. However, if we consider the asymmetry between tension and compression, it can be seen that the neutral layer does not coincide with the centroid of the cross-section. The mentioned equation for distribution of the strain can also be shown as:
where ε t is the strain at the top layer, y t is the distance of the top layer to the neutral axis and yis the distance of each layer to the neutral axis. These parameters are introduced for a rectangular cross-section and also Fig. 3 presents the linear distribution of the strain for the cross-section.

Schematic of the beam under bending

The cross-section of a rectangular beam and linear distribution of strain
In this figure h and b denote the beam height and the beam width in each cross section, respectively. In order to find the relation between the normal stress and the internal moment at each section, the classical equilibrium equation is applied:
where y t and y b are the distance of the top layer and bottom layer from the neutral axis, respectively. The subscript int is to show the internal reaction of the beam to the external loads. Then, the axial load in the beam can be found as:
The axial force (F ext ) and the bending moment (M ext ) of the beam can be calculated in terms of the type of loadings. Consequently, the static equilibrium equation for the beam cross-section could be expressed as:
Having the curvature along the length of the beam due to the force in loading and unloading, the slope and the deflection along the beam length are defined by the following equations:
where, the integration constants are calculated through satisfying the boundary conditions of the reinforced SMA beam. The procedure of analysis of the Euler–Bernoulli beam has been presented in Fig. 4, where n and m are number of cross-sections in the length direction and number of layers in the thickness direction, respectively, and i and j are updating variables in x and y directions and the process is continuing until i < n and j < m. The guess strain, in this particular problem, is considered to be in the domain of \(- 10 < \varepsilon_{Guess} (\% ) < 10\), and the guess of the neutral axis location span is −0.5 h < y 0 < 0.5 h, where y 0 is the location of neutral axis and it has to be on the cross section of the beam. Among the strain and neutral axis location guesses, those with the lowest error in Eq. (12) are chosen. It should be noted that this algorithm is applicable to any constitutive equation for the layers. The present model assumes that the stress in the layer can be calculated for a certain input strain. Therefore, for the Brinson’s constitutive model, where the stress is a non-linear function of the strain, a numerical method should be employed to find the stress in each layer. In the semi-analytical solution procedure, the well-known bisection method is used. The bisection method is applicable for solving equation f(x) = 0 numerically for the real variable x, where f is a continuous function defined on an interval [a, b] where f(a) and f(b) have opposite signs. At each step the method divides the interval in two by computing the midpoint of the interval (c = (a + b)/2) and f(c) and narrows the interval with respect to the signs of f(a), f(b) and f(c), until the function at the middle of the interval equals zero. In the finite element modeling, in order to solve non-linear equation in UMAT, the Newton–Raphson method is employed. Moreover, the bisection method is used when the Newton–Raphson method fails to converge [23].

Procedure of analysis of the Euler–Bernoulli beam
4 Numerical results
Based on the procedure outlined above and using a computer program the results for two different reinforced beams are derived. In order to validate the present semi-analytical model, the results are compared with the finite element solution for both cases.
4.1 The reinforced beam with superelastic SMA layers
In this section, the bending problem of a reinforced beam with superelastic SMA layers is investigated. The core section of the beam is a type of thermoplastic polymer with an elastic modulus of 1.1 GPa and a density of 1950 kg/m3. The beam has a rectangular cross-section of width 10 mm, height 10 mm and length 100 mm. The top and the bottom of the beam is covered by two SMA layers, with the same material properties as presented in Table 2. The reported material parameters have been adopted by Poorasadion et al. [23] from the experimental data reported by Gall et al. [40].
Figure 5 depicts the schematic beam characteristics of the model. Based on the plane stress assumption, a mathematical model is developed to predict the thermomechanical response of the reinforced beam. As a result, the 3D beam converts to a plane and the SMA layer converts to a string.

Geometry and coordinate system of the beam
Accordingly, a computer program, based on the proposed analysis, is developed to capture the bending behavior of the introduced smart beam. Furthermore, using the 2D Euler–Bernoulli beam element, the IBM is implemented in a user-defined material subroutine (UMAT), [23], in the commercially available nonlinear finite element software ABAQUS/Standard to simulate the problem. It should be noted that this 2D finite element model is employed to validate the proposed analytical model predictions and the assumptions made therein.
In the finite element analysis, the SMA part includes 30 elements (T2D2) with thickness of 0.1 mm and the length and width, similar to that of the beam. Also, the longitudinal cross-section of the beam includes 420 elements (CPS4R) (30 × 14 elements in length and thickness directions). Moreover, in the semi-analytical solution, to more accurately find the neutral axis, 3000 elements (30 × 100 elements in length and thickness directions) are considered.
The beam is clamped at one end and also is subjected to a transverse force (F = 150 N) at the other end. The quasi-static loading is considered and the strain rate effect is ignored accordingly. Moreover, after the loading, the unloading process has been studied as well. The temperature during the loading and unloading is 47 °C (>A f ). It means that the SMA behaves superelastically at this temperature. In most of the previous studies reported in the literature, it is assumed that the SMA material parameters are the same in tension and compression. In the following, the difference between considering the asymmetry in tension and compression of SMA, and also neglecting this assumption, has been investigated in detail.
The force versus the maximum deflection of the cantilever beam is illustrated in Fig. 6. In this Figure, the prediction of the proposed asymmetric model and the prediction of the symmetric model are compared. Moreover, finite element results are also shown to verify the numeric results of the proposed analytical model. It is noted that in the following discussion and figures, for the sake of briefness, AFEM, SFEM, ASAM and SSAM stand for the asymmetric 2D finite element model, the symmetric 2D finite element model, the asymmetric semi-analytical model and the symmetric semi-analytical model, respectively. Comparing the numerical simulation and the finite element analysis, it could be observed that the results are in good agreement (with a maximum of 5.3% error). In addition, the results show that the asymmetric behavior in tension and compression has a considerable effect on the bending response of the SMA beam. The difference between the asymmetric model and symmetric model in prediction of the deflection, is 14.3%, which confirms the importance of employing the IBM instead of OBM. However, it is noteworthy to mention that this difference is affected by several parameters e.g., geometric, material as well as the loading parameters.

Load deflection diagram of free end of the beam at the temperature 47 °C considering symmetric and asymmetric models, semi-analytical and 2D finite element method
Figure 7 depicts distribution of the transformation strain, at the end of the loading path, for both the asymmetric and symmetric models. As observed from Fig. 7, the finite element solutions and semi-analytical results are in good agreement. In addition, the shifting of the location of neutral axis in the asymmetric model is obvious. In this example, similar to works done by Rejzner et al. [25] and Mirzaeifar et al. [26], the neutral axis is shifted up toward the compression part. However, depending on the material parameters of the SMA, the neutral axis could be shifted up toward the tensile part, as well.

Strain storage at the end of the loading for SE beam, at temperature 47 °C, considering asymmetric and symmetric models, 2D finite element method and semi-analytical method
Figure 8 shows the stress and the strain distribution for the beam cross-section at 11.6 mm distance from the clamped end. These graphs are reported for the end of loading path. It is worth mentioning that in this figure black lines denote the finite element method results and colorful lines are for semi-analytical models. Both symmetric and asymmetric models are reported, separately. According to Fig. 8a, the movement of the neutral axis toward the tensile part, in the asymmetric model is obvious. This figure shows the variation of the transformation strain at the clamped end. The agreement of the semi-analytical and finite element solutions, confirms the linear strain distribution assumption of the Euler–Bernoulli beam theory. Furthermore, Fig. 9 shows the tension–compression behavior for the top and bottom layers of the SMA, at 11.6 mm distance from the clamped end. It is also observed that the semi-analytical results and the finite element results are in acceptable agreement.

a Strain and b stress distribution of the beam at 11.6 mm distance from the clamped end, at 47 °C

Stress-strain behavior for the top and bottom SMA layer at 11.6 mm distance from the clamped end at 47 °C, the semi-analytical and 2D finite element results
In this section the hysteresis inner loops are investigated. To this end, the same beam presented in the previous example firstly loaded up to 75 N and then unloaded, thereafter it is loaded up to 111.5 and 150 N and then unloaded, respectively. All the geometric and material parameters and the relevant boundary conditions are the same as the previous example.
Figure 10 depicts the load–deflection diagram for the free end of the beam. The semi-analytical model is in good agreement with the 2D finite element model and the schematic of the Fig. 10 is generally like the superelastic effect. Moreover, full recovery of the beam shape at the end of the unloading is obvious.

Load deflection diagram of free end of the beam at the temperataure 47 °C considering hysteresis inner loops for asymmetric model, semi-analytical and 2D finite element method
Figure 11 presents the stress–strain response for the top and bottom SMA layers. It is observed that the semi-analytical and 2D finite element model are in good agreement. Paths ABCDA and AbcdA are the stress–strain curves for the loading–unloading up to 75 N for the top and bottom SMA layers, respectively. Paths ABEFA and AbefA correspond to the loading–unloading up to 112.5 N and ABGHA and AbegfA paths present the stress–strain behavior for the loading–unloading up to 150 N. It is noted that all points C, c, E, e, G and g are for the end of the loading.

Stress-strain behavior for the top and bottom SMA layer considering hysteresis inner loops, asymmetric model, semi-analytical and 2D finite element method
4.2 The reinforced beam with low temperature SMA layers
In this section, the same beam introduced in the previous section is used with the same geometry, materials, elements and the number of elements. However, the loading is up to 105 N and the temperature is −12 °C, i.e. the SMA behavior is SME. In this section SME behavior denotes the SMA’s stress–strain behavior for loading and unloading cycles at a constant temperature, lower than A S . Figure 12 presents the force–displacement diagram for the loading and unloading of the reinforced beam, for both asymmetry and symmetry assumptions. The semi-analytical solution and the finite element approach results are qualitatively in agreement. It can also be observed that the effect of asymmetry is considerable. It should be noted that the thickness of the SMA layer is relatively small here, compared to the beam thickness, and with increasing the SMA thickness, the asymmetry effect becomes more important.

Load deflection diagram of the free end of the beam at −12 °C, in symmetric and asymmetric models, for both semi-analytical and 2D finite element method
To compare the symmetric and the asymmetric models, the contour plots of the transformation strain at the end of the loading path and for both the semi-analytical and finite element solutions are presented in Fig. 13.

Strain transformation at the end of the loading path for SME beam, at −12 °C, considering asymmetric and symmetric models, semi-analytical method and 2D finite element method
Figure 13 indicates the good agreement of both the finite element and semi-analytical approaches. To compare in a more detailed way, the strain distribution for the cross section at x = 11.6 mm from the clamped end (at the end of loading path) is plotted in Fig. 14. The good agreement of the strain distribution and the linearity of the semi-analytical and finite element solutions show the validity of semi-analytical approach and the linear strain distribution assumption.

Strain distribution of beam at 11.6 mm distance from the clamped end, at −12 °C, considering symmetric and asymmetric models
Figure 15 presents the stress–strain behavior for the top and bottom SMA layers. The considerable difference between ε and σ in tension and compression makes the bottom layer to endure more compressive stresses in the asymmetric model. It is worth mentioning that all the reports in this study are based on material parameters reported by Gall et al. [40].

Stress–strain behavior for the top and bottom SMA layers at 11.6 mm from the clamped end, at −12 °C
Also, the stress distribution (in a selected section of the structure) has been plotted in Fig. 16, for the end of the loading path (a) and end of the unloading path (b). As one may see from Figs. 9 and 15, there is a difference in the end of the unloading path. The reason is due to the fact that during the unloading, at the temperature higher than A f , the SMA is superelastic and no residual strain remains. Thus, the transformed strains at the core of the beam, are becoming completely vanished. However, at low temperatures, memory effect is happening in the SMA and as a conclusion, there is a residual strain at the core of the beam, which makes the SMA layers endure stress.

Stress distribution at 11.6 mm distance of the clamped end, at −12 °C, for symmetric and asymmetric models a end of loading path, b end of unloading path
From Fig. 16b, it is observed that, there are three zero-stress fibers at the end of the unloading path. It could be noted that, considering the linear core part of the beam and thin thickness of the SMA layers, the maximum number of the zero-stress fibers are three. Although, with increasing the SMA thickness and assuming that the stress varies through the thickness of the SMA, more zero-stress fibers could be observed (see [28] among others).
Another notable result is the neutral axis movement across the beam section. Figure 17 shows the movement of neutral axis for the asymmetric model which indicates that the shift in the location of the neutral axis of the beam is about 8% of the beam width. This shifting in the neutral axis location results in different force–displacement diagrams for asymmetric and symmetric models. It is worth mentioning that in relatively low stresses and strains, the SMA behavior is approximately symmetric (see Figs. 9, 15), and as a result, there is no considerable shift in the location of the neutral axis near the free end of the structure. As it could be observed from Fig. 17, the location of the neutral axis is not predictable and it depends on the strain distribution on the beam cross-section.

Location of neutral axis at the end of loading for SE and SME beam
5 Summary and conclusions
In this study, employing an improved version of Brinson’s constitutive model to predict asymmetric behavior of SMAs, the researchers presented a semi-analytical formulation to predict the response of a reinforced beam with SMA layers under bending in loading–unloading cycles. To develop a semi-analytical method, Euler–Bernoulli beam theory assumptions were used. In order to validate the results of the presented semi-analytical formulation, a 2D finite element model was constructed. In this 2D FE modeling, a user-defined subroutine introduced in [23], was used to introduce the improved Brinson’s model. As an example, the bending of a cantilever beam, made of a thermoplastic polymeric core, reinforced with upper and bottom SMA layers, was investigated in both SME (T = −12 °C) and SE (T = 47 °C) loading conditions. In validation of the proposed model, an at least 95% agreement among the semi-analytical model and finite element solution was observed. In the low temperature mode, a 25% difference between the asymmetric and symmetric models was found. As an important result, a considerable shift in the location of the neutral axis from the centerline (about 8% of the beam width) was observed. Considering presented asymmetric model, in dynamic and vibration analysis, we predicted that it leads to production of more accurate results compared to those which used symmetric models. The presented method can also be used for investigating the effects of the material or geometrical parameters on response of smart structures consisting of reinforced SMA beams for their design and optimization processes.
References
Boyd JG, Lagoudas DC (1996) A thermodynamical constitutive model for shape memory materials. Part I. The monolithic shape memory alloy. Int J Plast 12(6):805–842
Ivshin Y, Pence TJ (1994) A thermomechanical model for a one variant shape memory material. J Intell Mater Syst Struct 5(4):455–473
Grasser E, Cozzarelli F (1994) A proposed three-dimensional constitutive model for shape memory alloy. J Intell Mater Syst Struct 5:78–89
Brocca M, Brinson LC, Bazant ZP (2002) Three-dimensional constitutive model for shape memory alloys based on microplane model. J Mech Phys Solids 50(5):1051–1077
Reese S, Christ D (2008) Finite deformation pseudo-elasticity of shape memory alloys - Constitutive modelling and finite element implementation. Int J Plast 24(3):455–482
Sayyaadi H, Zakerzadeh MR, Salehi H (2012) A comparative analysis of some one-dimensional shape memory alloy constitutive models based on experimental tests. Sci Iran 19(2):249–257
Auricchio F, Reali A, Stefanelli U (2009) A macroscopic 1D model for shape memory alloys including asymmetric behaviors and transformation-dependent elastic properties. Comput Methods Appl Mech Eng 198(17–20):1631–1637
Rizzoni R, Marfia S (2015) A thermodynamical formulation for the constitutive modeling of a shape memory alloy with two martensite phases. Meccanica 50(4):1121–1145
Shariyat M, Moradi M, Samaee S (2014) Enhanced model for nonlinear dynamic analysis of rectangular composite plates with embedded SMA wires, considering the instantaneous local phase changes. Compos Struct 109:106–118
Rogers CA, Barker DK (1990) Experimental studies of active strain energy tuning of adaptive composites. Proceedings of the 31st AJAA/ASME/ASCEIAHS/ASC structures, Structural Dynamics and Materials Conference, Washington D.C., April 1990
Rustighi E, Brennan M, Mace B (2005) Real-time control of a shape memory alloy adaptive tuned vibration absorber. Smart Mater Struct 14(6):1184
Indirli M, Castellano MG (2008) Shape memory alloy devices for the structural improvement of masonry heritage structures. Int J Archit Herit 2(2):93–119
Beom-Seok J, Min-Saeng K, Ji-Soo K, Yun-Mi K, Woo-Yong L, Sung-Hoon A (2010) Fabrication of a smart air intake structure using shape memory alloy wire embedded composite. Phys Scr T139:014042
Wang X (2002) Shape memory alloy volume fraction of pre-stretched shape memory alloy wire-reinforced composites for structural damage repair. Smart Mater Struct 11(4):590
Tanaka K (1986) A thermomechanical sketch of shape memory effect: one-dimensional tensile behavior. Res Mech 18:251–263
Liang C, Rogers CA (1990) One-dimensional thermomechanical constitutive relations for shape memory materials. J Intell Mater Syst Struct 1(2):207–234
Khandelwal A, Buravalla VR (2007) A correction to the Brinson’s evolution kinetics for shape memory alloys. J Intell Mater Syst Struct 19:43–46
Bekker A, Brinson L (1998) Phase diagram based description of the hysteresis behavior of shape memory alloys. Acta Mater 46(10):3649–3665
Buravalla V, Khandelwal A (2011) Evolution kinetics in shape memory alloys under arbitrary loading: experiments and modeling. Mech Mater 43(12):807–823
Vigliotti A (2010) Finite element implementation of a multivariant shape memory alloy model. J Intell Mater Syst Struct 21:685–699
Chung J-H, Heo J-S, Lee J-J (2006) Implementation strategy for the dual transformation region in the Brinson SMA constitutive model. Smart Mater Struct 16(1):N1–N5
DeCastro JA, Melcher KJ, Noebe RD, Gaydosh DJ (2007) Development of a numerical model for high-temperature shape memory alloys. Smart Mater Struct 16(6):2080
Poorasadion S, Arghavani J, Naghdabadi R, Sohrabpour S (2013) An improvement on the Brinson model for shape memory alloys with application to two-dimensional beam element. J Intell Mater Syst Struct 25:1905–1920
Baragetti S (2006) A theoretical study on nonlinear bending of wires. Meccanica 41(4):443–458
Rejzner J, Lexcellent C, Raniecki B (2002) Pseudoelastic behaviour of shape memory alloy beams under pure bending: experiments and modelling. Int J Mech Sci 44(4):665–686
Mirzaeifar R, DesRoches R, Yavari A, Gall K (2013) On superelastic bending of shape memory alloy beams. Int J Solids Struct 50(10):1664–1680
Auricchio F, Morganti S, Reali A, Urbano M (2011) Theoretical and experimental study of the shape memory effect of beams in bending conditions. J Mater Eng Perform 20(4–5):712–718
Ostadrahimi A, Arghavani J, Poorasadion S (2015) An analytical study on the bending of prismatic SMA beams. Smart Mater Struct 24(12):125035–125050
Eshghinejad A, Elahinia M (2011) Exact solution for bending of shape memory alloy superelastic beams. In: ASME 2011 conference on smart materials, adaptive structures and intelligent systems. American Society of Mechanical Engineers, pp 345–352
Asadi H, Bodaghi M, Shakeri M, Aghdam MM (2013) An analytical approach for nonlinear vibration and thermal stability of shape memory alloy hybrid laminated composite beams. Eur J Mech A Solids 42:454–468
Lu P, Cui FS, Tan MJ (2009) A theoretical model for the bending of a laminated beam with SMA fiber embedded layer. Compos Struct 90(4):458–464
Zhou G, Lloyd P (2009) Design, manufacture and evaluation of bending behaviour of composite beams embedded with SMA wires. Compos Sci Technol 69(13):2034–2041
Zak AJ, Cartmell MP, Ostachowicz WM, Wiercigroch M (2003) One-dimensional shape memory alloy models for use with reinforced composite structures. Smart Mater Struct 12(3):338
Kuo S-Y, Shiau L-C, Chen K-H (2009) Buckling analysis of shape memory alloy reinforced composite laminates. Compos Struct 90(2):188–195
Khalili SMR, Botshekanan Dehkordi M, Carrera E (2013) A nonlinear finite element model using a unified formulation for dynamic analysis of multilayer composite plate embedded with SMA wires. Compos Struct 106:635–645
Khalili SMR, Botshekanan Dehkordi M, Carrera E, Shariyat M (2013) Non-linear dynamic analysis of a sandwich beam with pseudoelastic SMA hybrid composite faces based on higher order finite element theory. Compos Struct 96:243–255
Khalili SMR, Botshekanan Dehkordi M, Shariyat M (2013) Modeling and transient dynamic analysis of pseudoelastic SMA hybrid composite beam. Appl Math Comput 219(18):9762–9782
Pinto F, Meo M (2014) Mechanical response of shape memory alloy–based hybrid composite subjected to low-velocity impacts. J Compos Mater 49(22):2713–2722
De la Flor S, Urbina C, Ferrando F (2011) Asymmetrical bending model for NiTi shape memory wires: numerical simulations and experimental analysis. Strain 47(3):255–267
Gall K, Sehitoglu H, Chumlyakov YI, Kireeva IV (1999) Tension–compression asymmetry of the stress–strain response in aged single crystal and polycrystalline NiTi. Acta Mater 47(4):1203–1217
Brinson LC (1993) One-dimensional constitutive behavior of shape memory alloys: thermomechanical derivation with non-constant material functions and redefined martensite internal variable. J Intell Mater Syst Struct 4(2):229–242
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Nassiri-monfared, A., Baghani, M., Zakerzadeh, M.R. et al. Developing a semi-analytical model for thermomechanical response of SMA laminated beams, considering SMA asymmetric behavior. Meccanica 53, 957–971 (2018). https://doi.org/10.1007/s11012-017-0756-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-017-0756-4